無線通信在電動單軌石英棒輸送系統中穩定性分析
2022-03-02 04:07:34施春林趙海倫徐金田
智能制造 2022年1期
施春林,趙海倫,薛 欽,徐金田
(江蘇中天科技精密材料有限公司,江蘇 南通 226009)
1 引言
近年來,隨著“寬帶中國”戰略的持續推進,“互聯網+”行動計劃,以及“一帶一路”“中國制造2025”等為代表的國家政策層面因素的推動與保障,超大數據中心、超級云計算中心、視頻消費飛速增長、移動互聯網(5G)升級換代等,使我國光通信行業保持了較高景氣度。同時,伴隨著國內人口紅利的逐步消失,各大光纖制造廠家產能持續釋放,通信行業同質化競爭日趨嚴重,如何在眾多強企中脫穎而出,需要不斷尋求技術創新和突破,物流自動化就是其中一個重要突破口。
隨著物流輸送系統自動化程度的不斷提高,無線通信技術在工業自動化技術中應用日漸成熟,利用無線網絡和有線網絡混合組網,是未來自動化控制技術的主要發展方向。同時無線通信技術的引入,也帶來了新的問題,如網絡的實時信號穩定性及本身固有的延時和丟包特點。本文以我司使用的電動單軌石英棒輸送系統中搬運小車在正常運行過程中偶發停頓故障為例,對生產現場通信使用工業無線網絡穩定性進行了深入分析和研究探討。
2 電動單軌石英棒輸送系統
該系統參照汽車行業電動單軌小車(Electrical Monorail System,EMS)進行結構設計,汽車行業EMS主要應用于汽車部裝、焊裝、總裝車間物料及零部件的自動運輸。電動單軌石英棒輸送系統同樣由載物車、導軌、道岔、C型扣、剪刀差機構、輔梁組成。集電器觸頭安裝于移動小車上,滑觸線安裝于輸送導軌內側形成有效供電系統。電動單軌石英棒輸送系統結構設計如圖1所示。
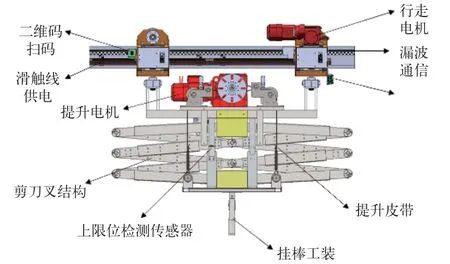
圖1 輸送系統結構
3 常用信號通信方式對比
設計初,信號通信方式優先考慮使用有線通信,即通過超六類網線加路由器進行信號傳輸,因現場小車為懸掛自動運行結構,通信線若經坦克鏈內設布局,會受制于道岔及多頻次來回循環路徑干涉,難以實施。
其次,考慮通過滑觸線進行信號傳輸,擬采用VAHLE的Powercom數據通信系統為本電動輸送小車提供實施通信,其優點在于可與法勒滑觸線系統配套使用,道岔處采用柔性電纜連接,缺點在于滑觸線現場制作安裝的效果對信號傳輸穩定性存在重要影響,系統測試評估過程中頻繁出現集電極觸頭與滑觸線不能可靠接觸導致信號中斷的現象,需頻繁維護,而維護作業需在生產現場搭建腳手架進行高空特種作業,對車間環境及安全管控均存在較大隱患,綜合評估此方案不符合現場試用要求。
為實現低成本、免維護、易安裝的目的,嘗試采用無線通信技術。經技術評估,選用PHOENIX的FL系列無線通信模組,以FL WLAN 5100作為接入點,以WLAN EPA作為客戶端,同時選用漏波電纜作為天線,將無線信號延伸至其所鋪設的位置,漏波電纜長度匹配導軌長度,進行暗裝敷設,以確保軌道周圍無線信號全范圍覆蓋,實現現場AP與客戶端之間的無線信號有效傳輸。其漏波電纜鋪設方案如圖2所示。
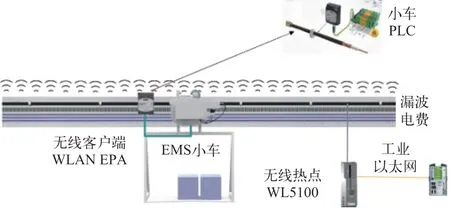
圖2 漏波通信
4 生產現場無線通信敷設方案設計
石英棒生產車間中工藝設備呈網格狀分布,左右跨度約35 m,為了讓物料有效流轉,現場采用32 m直軌布局,如圖3所示,在直軌中段設計多節道岔,方便懸掛小車中途避讓,以及一旦任一小車出現故障后可臨停岔路進行設備檢修。
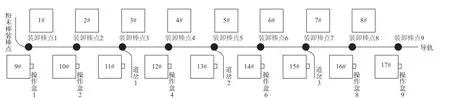
圖3 設備布局及道岔設計
考慮無線信號在傳輸過程中可能出現強度衰減,現場設計了2對1的無線通信方式(即2個接入點1個客戶端的形式進行布局)以便對信號進行增強。系統設計主要通過BECKHOFF的ADS通信協議進行數據無線傳輸,實現2大功能,功能1:移動小車相關信息的傳輸包括開關狀態、位置信息、運動狀態、速度信息和剪刀差位置等信號;功能2:主控柜相關控制命令的傳輸包括載物車啟動、停止、剪刀差的升降、道岔動作等控制命令。其無線系統總體架構設計如圖4所示。
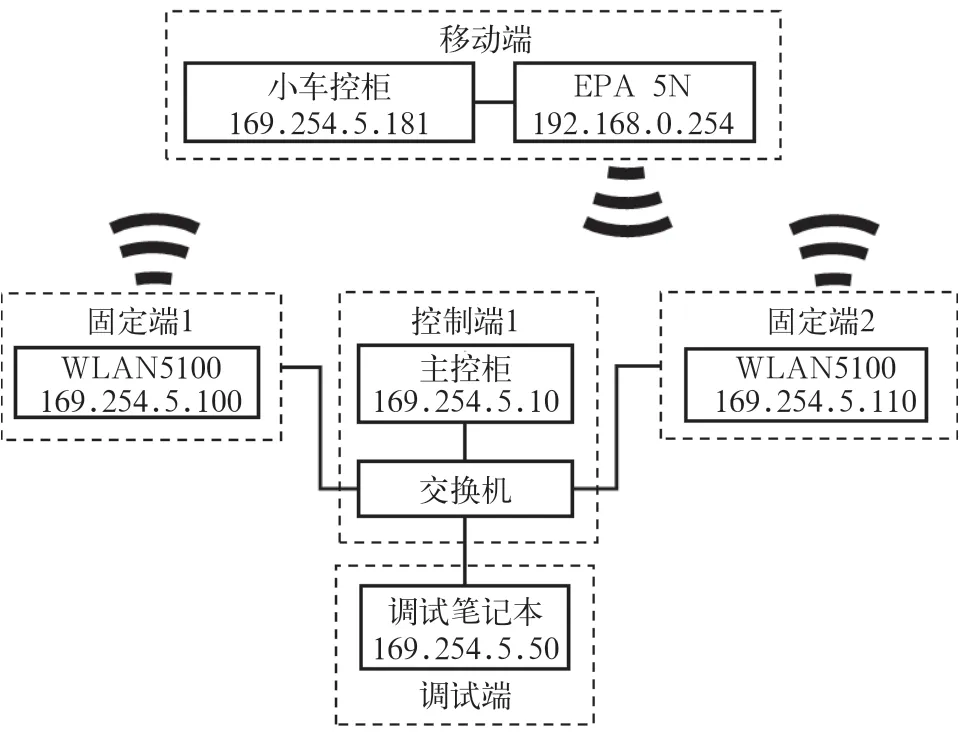
圖4 無線系統總體構架
5 無線通信在實際應用中穩定性分析
在系統投運初期,EMS小車整體運行狀況良好,能夠滿足石英棒流轉要求,在運行一個月之后,現場操作人員反饋,某個小車在過程中會偶爾出現停頓現象,必須通過手動復位才能恢復運行。通過調試軟件進行在線監控及小車實際運行過程跟蹤,未發現設備無線供電、限位開關觸發、機械卡死等異常狀態。通過進一步跟蹤和狀態記錄,EMS小車在多次往返運行過程中停頓的位置很具隨機性;因此,初步斷定故障原因很有可能為無線通信信號的穩定性受到了一定的干擾。考慮無線網絡的特殊性,無線電磁波信號容易受到干擾或者是非法入侵,從而影響無線網絡的穩定性及安全性。無線網絡的穩定性是指無線網絡中信號應該是持續良好的,信號強弱程度應該是保持不變的,信號強度不受外界干擾而有所影響,即使是信號弱的地方也不能出現時強時弱時無的現象。想要提高無線網絡的穩定性,就必須對影響無線網絡穩定性的因素進行分析,找出影響網絡穩定性的原因,制定和實施相應的措施。其影響穩定性的因素主要有信號傳輸、環境干擾和網絡本身之間的干擾。屏蔽環境下信號傳輸一般通過漏波電纜進行,漏波通信主要涉及2個技術指標。
5.1 傳輸線特征阻抗
無限長傳輸線上各處的電壓與電流的比值定義為傳輸線的特性阻抗,用表示。同軸電纜的特性阻抗的計算公式為

式中,為同軸電纜外導體銅網內徑;為同軸電纜芯線外徑;為導體間絕緣介質的相對介電常數。通過計算= 50Ω,其中漏波電纜負載阻抗選用型號為50Ω,與之匹配,饋線上只存在傳向終端負載的入射波,而沒有由終端負載產生的反射波,天線取得全部信號功率。
5.2 饋線衰減系數
信號在饋線里傳輸,除有導體的電阻性損耗外,還有絕緣材料的介質損耗。這兩種損耗隨饋線長度的增加和工作頻率的提高而增加。信號衰減系數計算公式為

式中,為輸入到饋線的功率;為長度為(m)的饋線輸出功率;計算出衰減系數為19.8 dB/100 m,在實際運行中最遠距離為35 m,信號理論衰減值為6.93 dB,受環境因素影響衰減值略微偏大,但不足以影響信號整體穩定性。
現場使用無線網絡信號掃描工具(InSSIDer)進行信號監測,對信號名稱、強度、信道進行檢查并分析,無線網AP數量眾多,統計見表1。

表1 無線網AP統計表
PxC_CSI與車間網絡Prod同處36信道且信號重疊嚴重,環境信號檢測結果如圖5所示。解決方案為對5100模塊重新進行參數設定,將2個AP通道分別設置為44和48,成為獨立通道,排除干擾可能性。

圖5 環境信號檢測結果
其次對通信信號監聽,將無線模塊IP地址與BECKHOFF CX51系列PLC控制器設置在同一網段(169.254.5.X),通過PC調試端進行信號監控,對某一時間段進行數據統計和處理分析,如圖6所示。
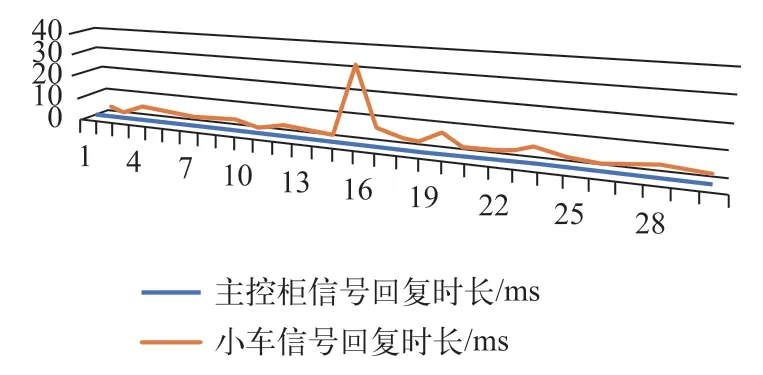
圖6 信號回復耗時監控
經過以上分析可知:①無線信號的反饋時間高于有線信號的反饋時間;②無線信號存在波動性,即穩定性能在某一時刻會受到干擾;③信號回復時間一般為2 ms,最長回復時間為32 ms。針對32 ms延時問題,對PLC控制器掃描周期進行確認,打開TwinCAT3軟件,連接主控柜PLC程序,在硬件配置中打開Real-Time查看任務掃描周期為10 ms,結果如圖7所示。因現有無線網絡配置無法縮短信號回復時間,故采用增加PLC掃描周期至80 ms(數值過大,導致遠程通信模塊中斷),通過測試發現小車停頓現象消除。

圖7 系統掃描周期
經研究分析和技術探索,無線模塊迭代更新升級應用WLAN 1100替代前期WLAN EPA,再嘗試通過無線信號發射功率調整(因車間凈化面板墻導致無線回傳率過高,可適當降低功率至-5 dBm),可有效提升整個無線網絡通信的穩定性;此外,在經濟及環境條件許可的情況下,可通過增加無線AP的數量(即增加無線設備分布密度,AP之間漫游切換時間需綜合考慮)來提高信號的穩定性。
6 結束語
通過本次無線通信在電動單軌石英棒輸送系統穩定性分析,成功摸索出一套提高屏蔽車間電動輸送小車系統中無線通信穩定性的技術手段,積累了無線通信設備故障解決的經驗,為后續同類設備通信故障的解決提供了很好的借鑒。隨著智能制造在國內制造業快速生根發芽,無線通信技術已快速滲透至智能搬運、智能輸送、智能倉儲等眾多物流自動化領域,對通信過程中收發數據的穩定性、準確率的要求將會越來越高,這也將直接影響到設備的高效性、可靠性、安全性等方面;因此,我們需在這方面繼續潛心研究,以保證無線通信系統高效助力智能物流。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25