車輛自適應車道偏離識別算法研究
2022-03-02 10:05:34宋宇欣文凱凱鄧基辰
汽車與新動力 2022年1期
關鍵詞:檢測
宋宇欣 文凱凱 鄧基辰
(杭州電子科技大學,浙江杭州 310018)
0 前言
近年來,汽車行業的研究方向逐漸轉向智能駕駛領域。車道偏離預警和車道保持控制系統作為智能駕駛的重要組成部分,是實現智能駕駛的前提。目前,車道偏離預警系統大多利用車外的攝像頭采集車道線等周邊環境信息,再利用圖像處理技術對車道進行檢測,將檢測結果與當前車輛行駛狀態進行綜合比較,判斷車輛是否偏離了既定車道[1]。
現階段常用的偏離決策算法主要有當前時刻側向位移法(CLD)、瞬時橫向加速度法(CLV)、預瞄軌跡偏離法(DTD)、跨道時間判定法(TLC)等4種類型。胡驍等[2]提出了1種基于特征顏色識別的邊緣檢測算法,紅-綠-藍(RGB)分量值是顏色識別所考察的特征。該方法將特征顏色區域通過設定好的轉移函數進行標記,然后對候選區域實施邊緣檢測,忽略大量的無效邊緣。該方法的檢測結果最終依靠RGB分量的閾值分割進行處理,在一定程度上不夠準確。何建輝等[3]提出了車道線檢測算法,通過動態劃分檢測區域,改進了傳統的固定區域檢測算法。該方法通過對檢測車道線的攝像頭進行標定并獲取參數,對偏離時間設置閾值條件,以控制系統決策是否進行預警。鐘澤濱[4]提出的方法可以對車道線進行精確檢測。該方法利用卷積神經網絡,對當前車道線的對稱情況進行精確檢測,并設置偏離安全閾值,若檢測結果超出安全閾值,則對駕駛員發出預警信息。
本文基于攝像頭采集到的圖像信息,提出了一種自適應車道偏離識別算法。該算法可以對車輛在直道或彎道2種不同工況下的行駛狀態進行車道偏離判斷,既保證了計算的速度又保證了結果的準確性。最后,采用仿真方法,通過車道偏離識別出的數據,使用比例-積分-微分(PID)算法對車輛行駛狀態進行控制,使車輛在預定的車道內行駛,以此驗證了所提出的車道偏離識別算法的有效性。
1 車道偏離識別算法
車道偏離識別算法將攝像頭采集到的車道線信息分為直道信息和彎道信息。若系統檢測到當前行駛車道為直道,則采用偏離判斷基準線法判斷是否發出預警信息;若系統檢測到當前行駛車道為彎道,則采用觸線時間閥值法結合車身傳感器傳輸的車輛狀態信息進行判斷。車道偏離識別算法流程圖如圖1所示。
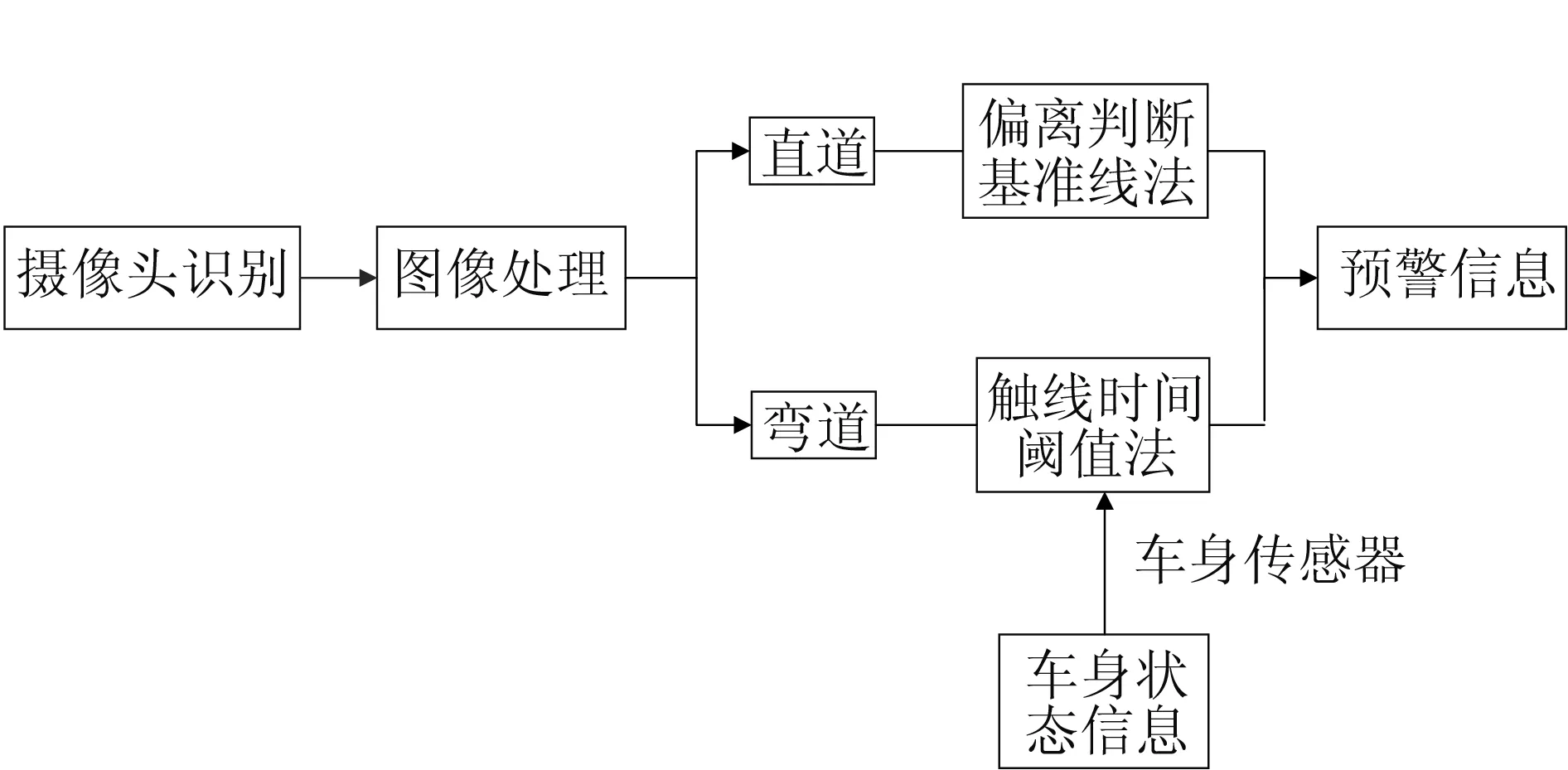
圖1 車道偏離識別算法流程圖
1.1 直道工況
車輛在直線車道上行駛時,根據成像原理,兩平行車道線在攝像頭內呈梯形。若攝像頭的視距足夠長,甚至會出現2條直道線交叉并消失的情況,即車道線呈三角形,如圖2所示。圖中,線段QM、QN分別為左右車道線,P1P2為引入的偏離判斷的基準線。其中,感興趣區域(ROI)為車輛前端采集車道線信息所用攝像頭的圖像處理區域。
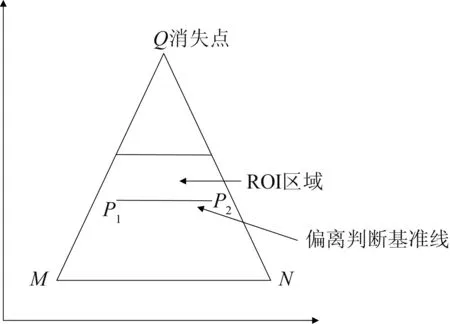
圖2 直道工況下車道線攝像頭內成像
當車輛在直道工況下行駛且未發生偏移時,左右兩側車道線與偏離判斷基準線的向量關系如圖3所示。
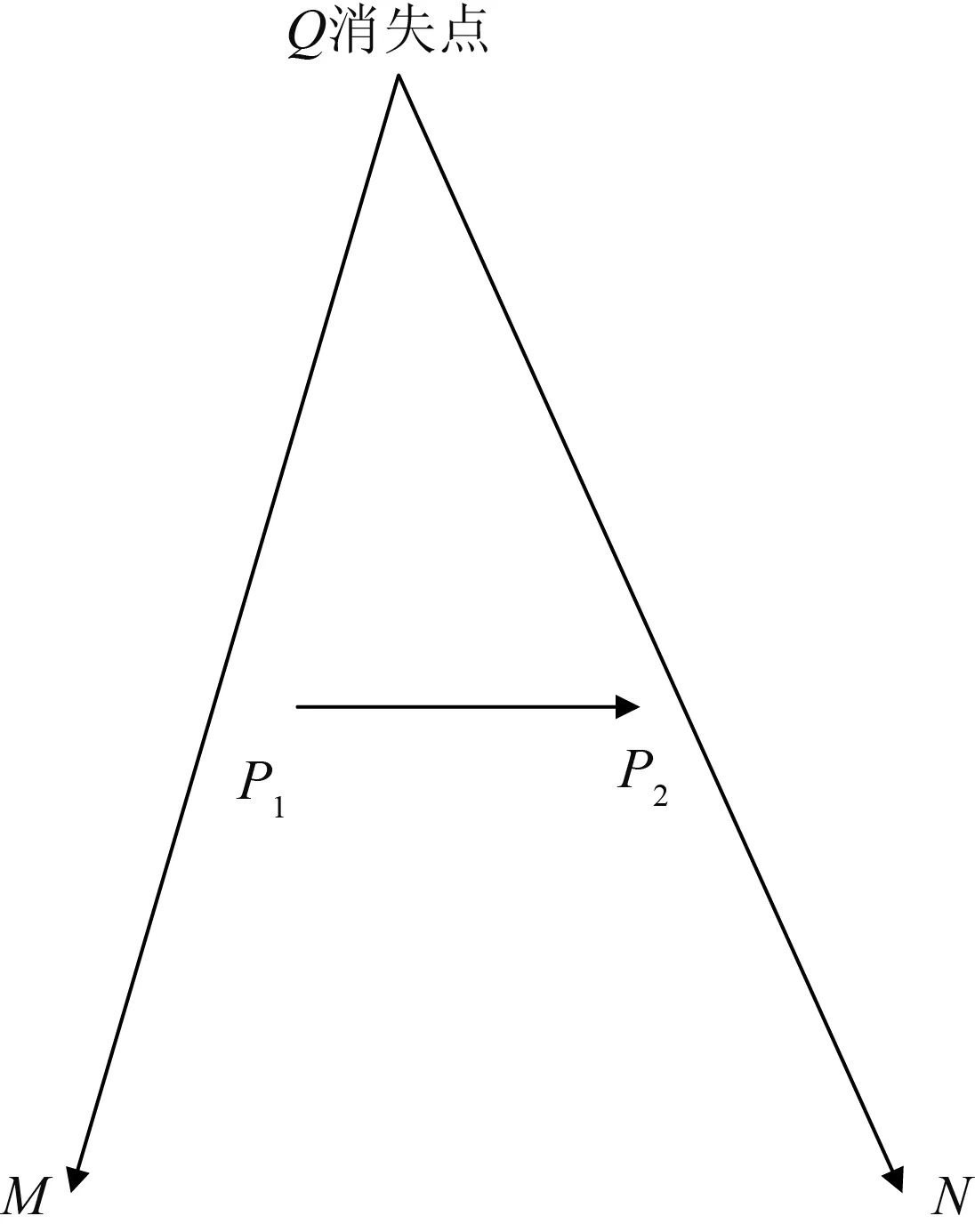
圖3 直道工況下未發生偏移時,兩車道線與偏離判斷基準線向量圖
由圖3可知,車道線QM、QN始終在偏離判斷基準線的順時針方向,且無交叉現象。由向量的外積可知:lQM×lP1P2>0;lQN×lP1P2>0。
在直道工況中,車輛偏離分為左偏離和右偏離。針對這2種不同的偏離行駛特點,下文進行詳細分析。
1.1.1 車輛向左偏移行駛
車輛向左側車道發生偏離時的攝像頭內成像示意圖如圖4所示,向量關系圖如圖5所示。
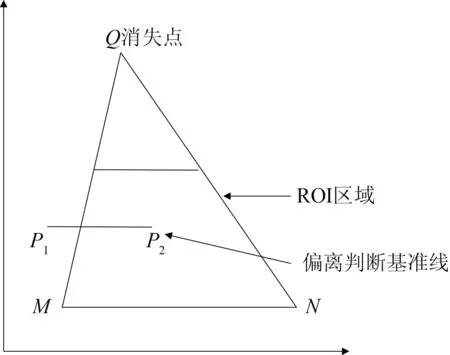
圖4 直道工況下車輛向左偏移時攝像頭內成像
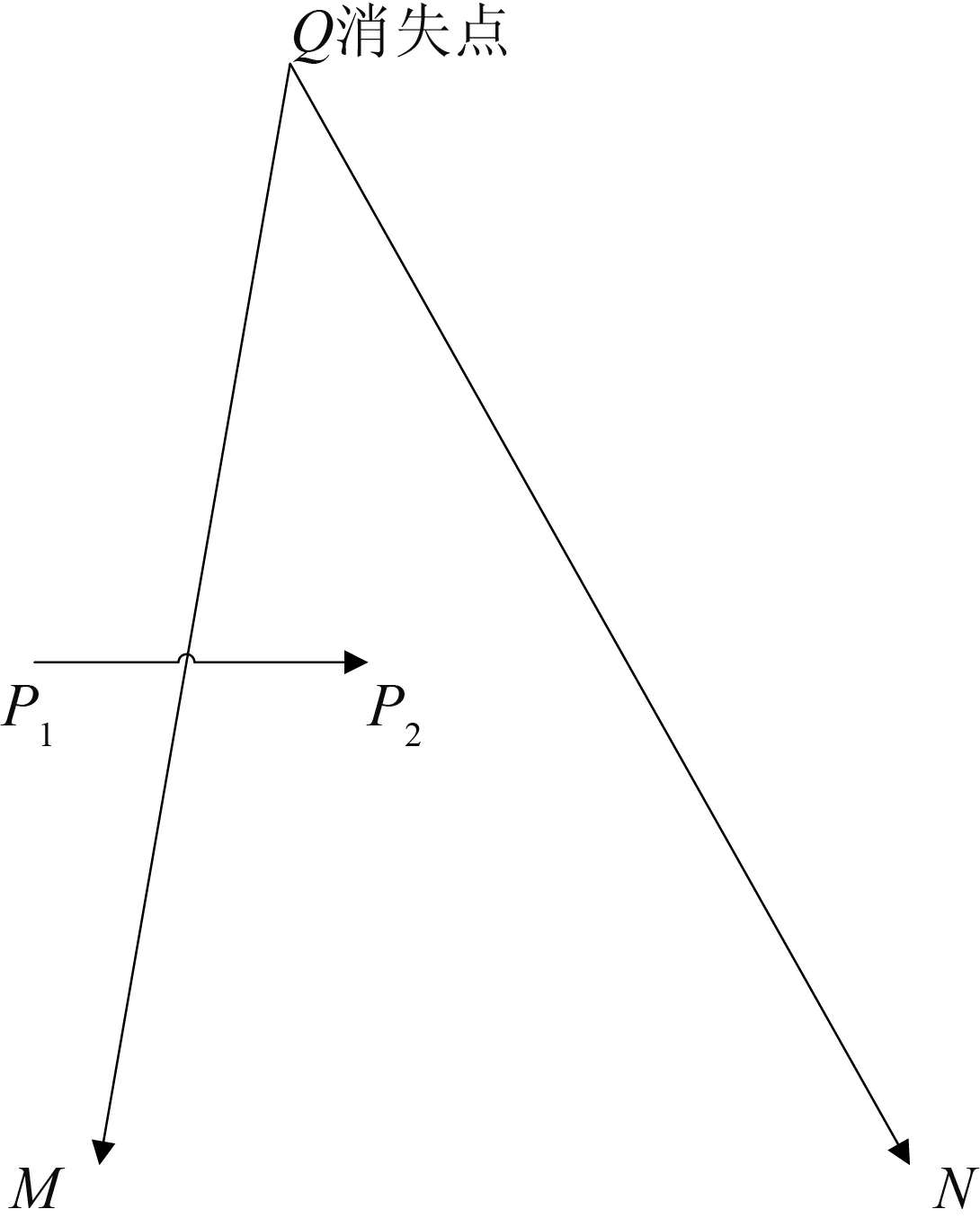
圖5 直道工況下向左偏移時,兩車道線與偏離判斷基準線向量圖
車道線在攝像頭視野內呈向左傾斜的三角形,偏離判斷基準線P1P2與左側車道線QM相交。QP1始終在QM的順時針方向,即lQP1×lQM>0。此時,安全閾值S1為:
(1)
綜上可知,當車輛在直道工況下行駛且向左側偏移時,S1>0。
1.1.2 車輛向右偏移行駛
車輛向右側車道發生偏離時的攝像頭內成像示意圖如圖6所示,向量關系圖如圖7所示。

圖7 直道工況下向右偏移時,兩車道線與偏離判斷基準線向量圖
車道線在攝像頭視野內呈向右傾斜的三角形,偏離判斷基準線P1P2與右側車道線QN相交。QP2始終在QN的逆時針方向,即lQP2×lQN<0。此時,安全閾值S2為:
(2)
綜上可知,當車輛在直道工況下行駛且向右側偏移時,S2<0。
1.2 彎道工況
在彎道工況時采用TLC算法。其主要原理為車輛在偏離車道行駛過程中,車輛本身的航向角、車速和方向盤轉角等參數不變,計算車輛的某一輪胎和車道線進行線接觸時所用的時間為tTLC。當該時間值小于一定的閾值時,車道偏離預警系統被激活,給予駕駛員提醒信息。本文TCL算法的基本公式如下:
(3)
式中:dx代表汽車接觸到車道線時所行駛的距離,單位m;vx代表當前汽車的縱向速度,單位m/s。
車輛在彎道工況行駛向左偏移的示意圖如圖8所示。
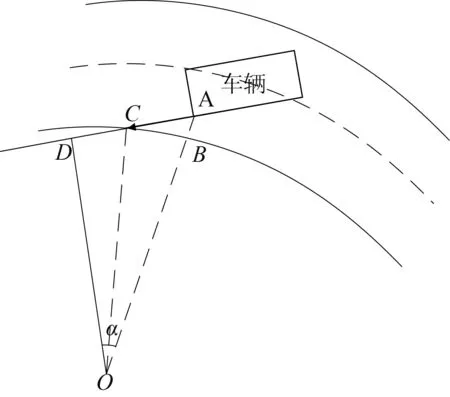
圖8 彎道工況下車輛向左偏移示意圖
在圖8中,點A表示車輛的左前側車輪;點O表示車道線的曲率中心;點B表示汽車左前輪與曲率中心連線與車道線的交點;點C表示不改變駕駛方向車輛左前輪與車道線接觸的點;點D為過曲率中心向AC所作垂線,此時相對偏航角為α。
結合公式(3),可計算車輛在彎道工況下行駛偏離車道的跨線時間tTLC為:
(4)
式中:dx為汽車接觸到車道線時所行駛的距離,單位m;vx為當前汽車的縱向速度,單位m/s;r為曲率半徑,單位m;yr為車輪左前輪到邊界線的距離,單位m;α為相對偏航角,單位(°)。
車輛在彎道工況行駛向右偏移計算方法同式(4)。
2 仿真分析
基于真實的道路狀況,運用仿真軟件對比例-積分-微分(PID)控制算法下的車輛直道和恒曲率彎道中的運行情況進行了仿真,以驗證文中所設計的不同工況下的偏離判斷的有效性。
2.1 直道工況仿真
基于直道的普遍性,考慮到駕駛員在直道上行駛的各種干擾因素,如疲勞、走神等,本文仿真了直道工況。仿真的直道行駛工況如圖9所示。
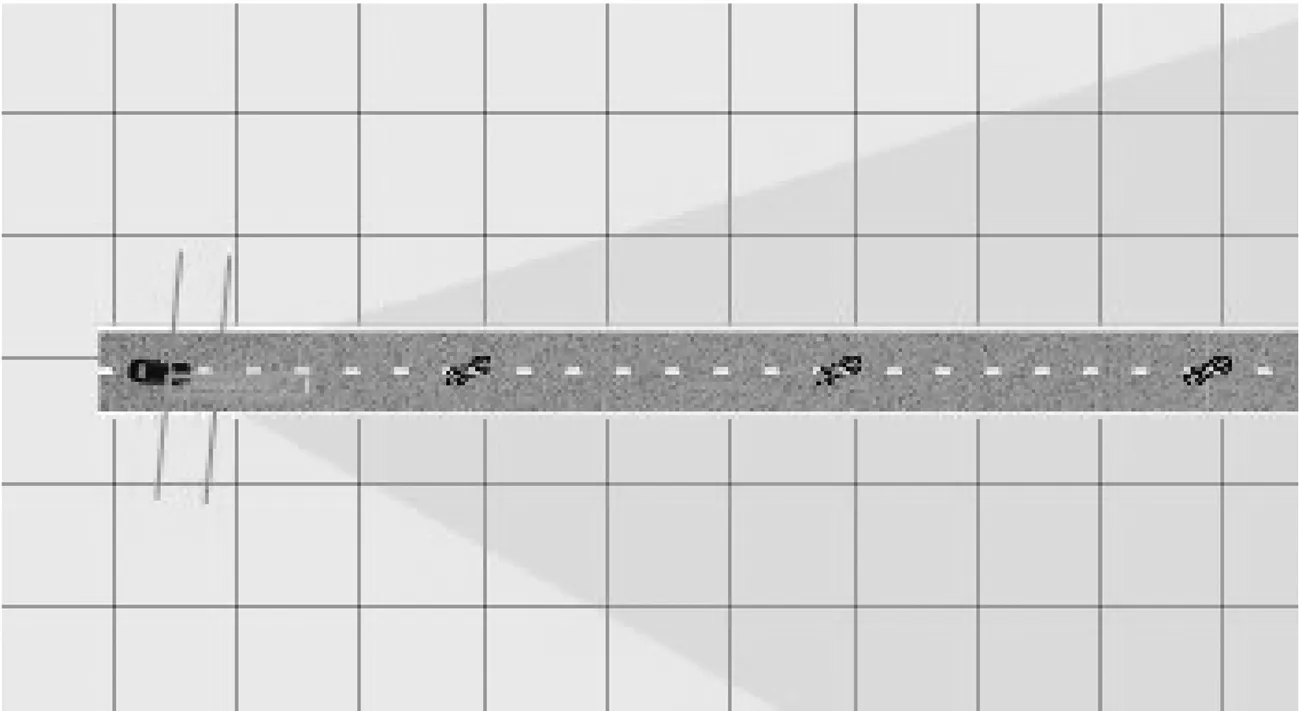
圖9 車輛直道行駛工況
在直道行駛工況中,在PID控制算法下的車輛行駛軌跡如圖10所示。從圖10可以看出,橫向位移在車輛行駛約20 m后被控制住。大約在100 m后,橫向位移基本為零。該仿真意味著車道偏離被系統正確識別后,車輛被控制沿著預期的車道中心線繼續行駛。
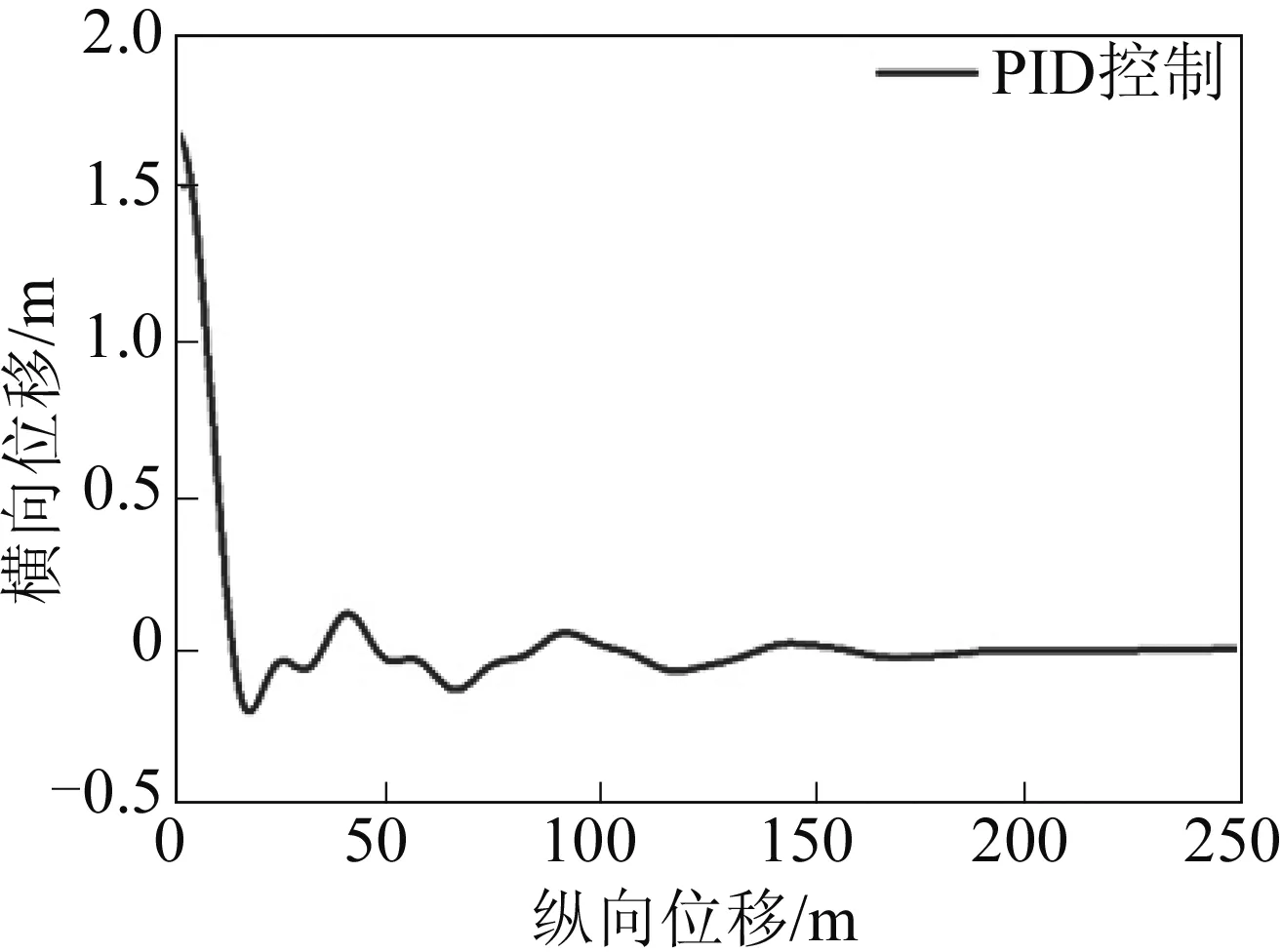
圖10 直道工況中PID控制算法下的車輛行駛軌跡
2.2 彎道工況仿真
相較于直道,彎道更加考驗駕駛員的技術,尤其一些連續彎道地段是交通事故的高發區。因此,實現彎道駕駛的自動化是汽車行業發展的必然趨勢。如圖11所示,本文采用了恒曲率彎道模型。在算法模型中,技術人員設置汽車動力學模型的轉向輸入為0,系統僅檢測車道線,在控制器施加主動控制附加橫擺力矩的作用下,觀察汽車是否能夠自主調節,在恒曲率彎道內行駛。在PID控制算法下,車輛仿真行駛的軌跡如圖12所示。
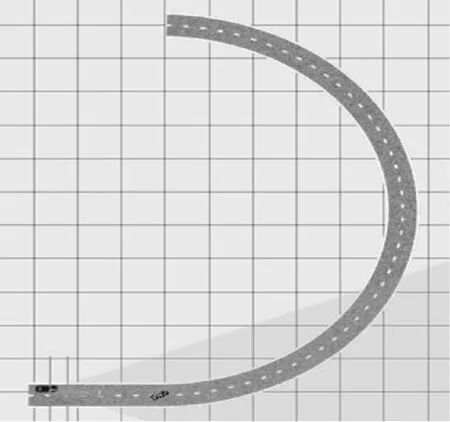
圖11 恒曲率彎道下車輛的行駛軌跡
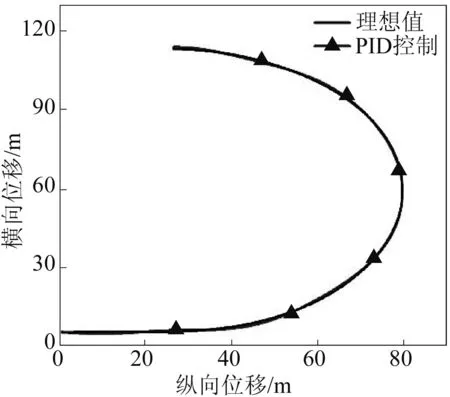
圖12 PID控制下車輛彎道行駛的軌跡
在駕駛員不操作車輛方向盤的情況下,運用PID控制算法,系統可以接管車輛。從圖12中可以看出,車輛實際行駛線與理想的車道中心線基本重合,可以順利通過恒曲率車道。這也就意味著車道偏離識別算法能夠正確識別出彎道線。
3 結語
車輛駕駛的智能化是行業發展的必然趨勢,同時,也意味著對汽車安全的更高要求。本文提出了自適應車道偏離識別算法,分別針對直道和彎道2種不同車道,采用不同的車道線識別方式進行識別,提高了識別的速度和精度。本研究采用仿真的手段,運用自適應車道偏離識別算法獲取的數據,通過PID控制算法分別仿真了車輛在直道和彎道下車輛的行駛狀況。仿真結果表明,本自適應車道偏離識別算法所提供的數據可以保障車輛在預期的車道內行駛,算法具備有效性。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48