基于質量估計的商用車線控制動減速度控制
2022-03-07 10:51:44王光艷楊傳雄胡碧友車美琳
汽車科技 2022年1期
王光艷 楊傳雄 胡碧友 車美琳

摘 ?要:為了滿足無人駕駛商用車線控制動系統的減速度控制需求,提出了一種基于質量估計的減速度控制算法。根據車輛縱向動力學模型得到估計質量的初始值,利用模糊邏輯法獲取估計質量的置信度從而改變濾波系數,既能使估算結果快速收斂,也能過濾掉噪聲信號,并且算法運算量小可以降低計算負荷。基于估計質量信息,設計“前饋+反饋PID”控制器,控制車輛減速度達到上層決策系統的期望指令。實驗結果驗證了該控制方法具有較好的控制效果。
關鍵詞:商用車;線控制動;質量估計;減速度控制
中圖分類號:U461.1 ? ? ?文獻標識碼:A ? ? ?文章編號:1005-2550(2022)01-0054-08
Commercial Vehicle Brake by Wire Deceleration Control based on Mass Estimation
wang guang-yan1, yang chuan-xiong1, hu bi-you1, che mei-lin2
(1.Dongfeng Automobile Co., Ltd. Wuhan 430056, China; 2.Dongfeng Yanfeng Automotive Trim Systems Co. , Ltd. Wuhan 430056, China )
Abstract: In order to meet the deceleration control requirements of driverless commercial vehicle line control system, a deceleration control algorithm based on mass estimation is proposed. According to the vehicle longitudinal dynamics model, the initial value of the estimated mass is obtained, and the confidence of the estimated mass is obtained by using the fuzzy logic method, so as to change the filtering coefficient, which can not only make the estimation result converge quickly, but also filter out the noise signal, and effectively reduce the calculation load of the controller. Based on the estimated mass information, a “feedforward + feedback PID” controller is designed to control the deceleration of the vehicle to achieve the desired command of the upper decision system. The experimental results show that the control method has good accuracy and robustness.
Key Words: Commercial Vehicle; Mass Estimation; Brake By Wire; Deceleration Control
1 ? ?前言
隨著無人駕駛技術的快速發展,汽車線控底盤技術受到了廣泛的關注。線控底盤能夠快速準確地響應上層主動控制指令,保證車輛行駛的安全性。線控底盤主要包括線控制動、線控轉向、線控驅動以及線控懸架[1]。線控制動系統能夠主動調節制動壓力,合理控制車輛減速度,保證車內乘客的安全和舒適性。
商用車多行駛于固定線路,未來無人駕駛技術首先會在商用車中實現大規模應用[2]。因為商用車質量較大,所以目前商用車主要使用氣壓制動系統[3]。商用車氣壓線控制動系統通過控制前后橋比例閥的占空比實現制動壓力的控制[4]。無人駕駛汽車上層決策模塊,可以根據車輛自身狀態和環境計算出車輛所需的制動減速度,同時與駕駛員制動意圖[5]進行協調,響應最大期望制動減速度。
實現減速度控制首先需要設計車輛狀態觀測算法,獲得車輛質量信息以及車輛減速度信息,再者需要設計控制器使車輛實際減速度趨近期望減速度。汽車整車質量的估計是汽車狀態觀測中十分重要的內容[6],特別對于商用車而言,具有質量多變的特點。胡滿江等[7]推導出加速度與輪速信號間的幅頻函數關系,提出了一種基于縱向頻響特性的整車質量估計方法。Mcintyre等[8]基于車輛縱向動力學模型,通過最小二乘參數辨識對質量進行估計。雷雨龍等[9]提出基于擴展卡爾曼濾波的車輛質量估計方法。任志英等[10]利用觀測數據提供的信息,提出了一種基于AEKF的車輛質量估計算法。本文使用一種基于模糊邏輯的自適應濾波系數質量估計算法,在工程應用中相較于往前學者的研究方法占用的計算資源更少,同時能夠達到準確性要求。關于車輛速度以及減速度的估算,國內外學者們已經進行了大量研究[11-14],本文主要采用變斜率法[15]進行車速估算,通過車速微分得到減速度信息,相關算法本文不再贅述。
2 ? ?商用車質量估計
2.1 ? 整車動力學模型
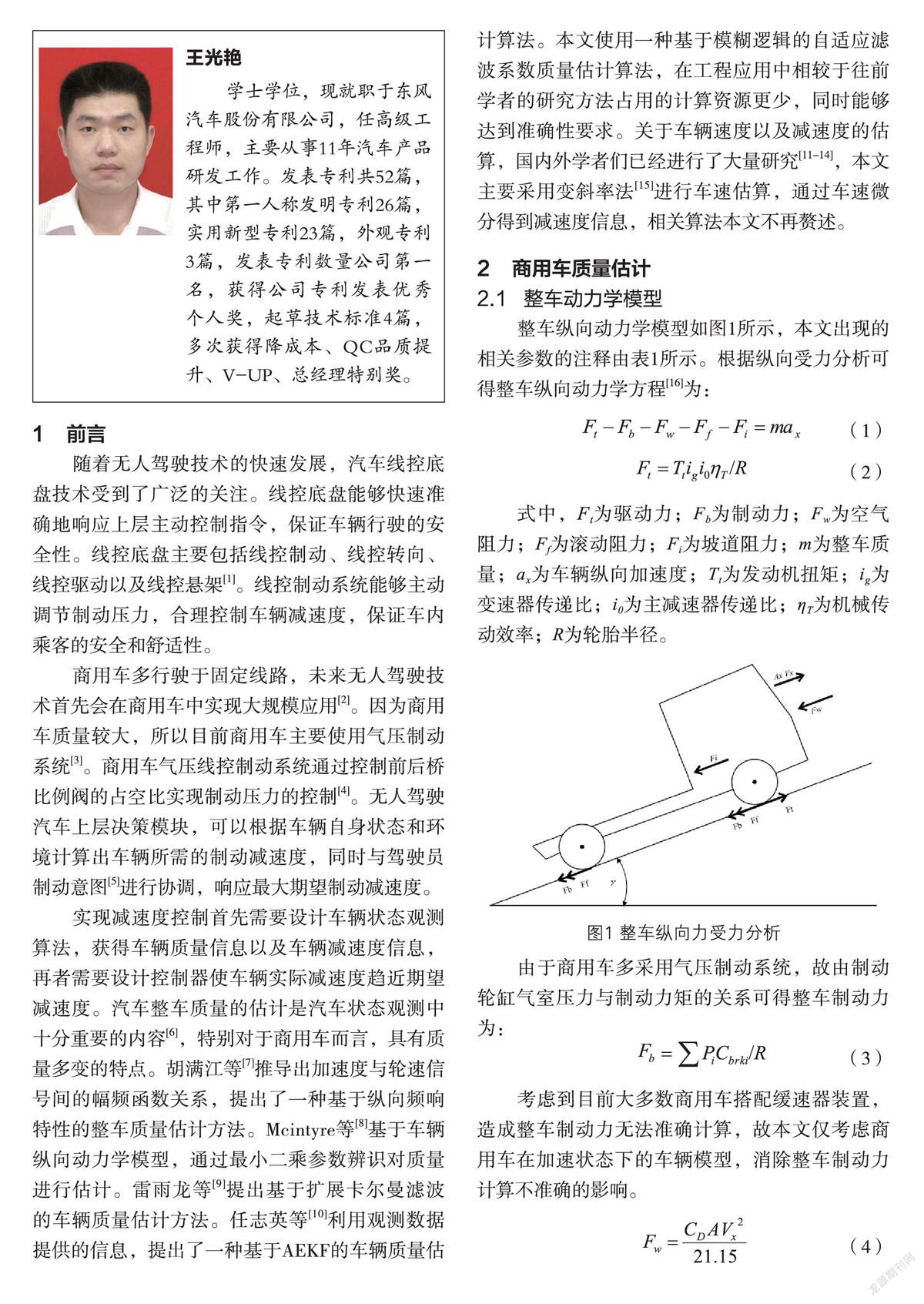
整車縱向動力學模型如圖1所示,本文出現的相關參數的注釋由表1所示。根據縱向受力分析可得整車縱向動力學方程[16]為:
(1)
(2)
式中,Ft為驅動力;Fb為制動力;Fw為空氣阻力;Ff為滾動阻力;Fi為坡道阻力;m為整車質量;ax為車輛縱向加速度;Tt為發動機扭矩;ig為變速器傳遞比;i0為主減速器傳遞比;ηT為機械傳動效率;R為輪胎半徑。
由于商用車多采用氣壓制動系統,故由制動輪缸氣室壓力與制動力矩的關系可得整車制動力為:
(3)
考慮到目前大多數商用車搭配緩速器裝置,造成整車制動力無法準確計算,故本文僅考慮商用車在加速狀態下的車輛模型,消除整車制動力計算不準確的影響。
(4)
(5)
(6)
式中,Pi為制動輪缸氣室壓力;Cbrki為制動器系數;CD為空氣阻力系數;A為迎風面積;Vx為汽車縱向速度;γ為道路坡度(本文作為已知數據);g為重力加速度;f為滾動阻力系數。
將式1整理,加速狀態不考慮制動力,把含有質量的分項移到同一側:
(7)
(8)
(9)
式中,Fx為等效縱向力;aEff 為等效縱向加速度。
由此可得基于整車縱向動力學模型的質量估計初始值為:
(10)
上述基于整車縱向動力學模型得到的質量估計初始值,受公式中等效縱向力及等效縱向加速度的影響很大,初始估計結果容易產生較大波動,故需要采用低通濾波器進行濾波,遞推得到平穩準確的估計質量值。
2.2 ? 基于模糊邏輯的質量估計算法
因為整車質量在車輛行駛過程變化較小或幾乎不變,對估計結果的實時性要求不高。同時由于汽車縱向力和縱向加速度只有在平穩行駛工況下才能夠獲得較為平穩的數據,從而計算得到穩定的質量估計值,所以需要對汽車實際行駛工況進行篩選,選出適合進行質量估計的平穩行駛工況,符合條件后再進行質量估計,根據以往仿真及實驗的經驗,選取的具體條件如下:
先根據汽車整車相關狀態量的門限值進行初步判斷,作為允許質量估計的初步條件:
(1)等效縱向力的絕對值|Fx|大于最小縱向力Fxmin(1000N)。
(2)汽車制動防抱死系統(ABS)沒有觸發。
(3)汽車主動偏航控制系統(AYC)沒有觸發。
(4)汽車牽引力控制系統(TCS)沒有觸發。
(5)汽車不處于換擋狀態。
(6) 縱向車速Vx大于最小縱向車速Vxmin(5m/s)。
(7)側向加速度ay小于最大側向加速度aymax(1m/s2)。
(8)汽車不處于倒車狀態。
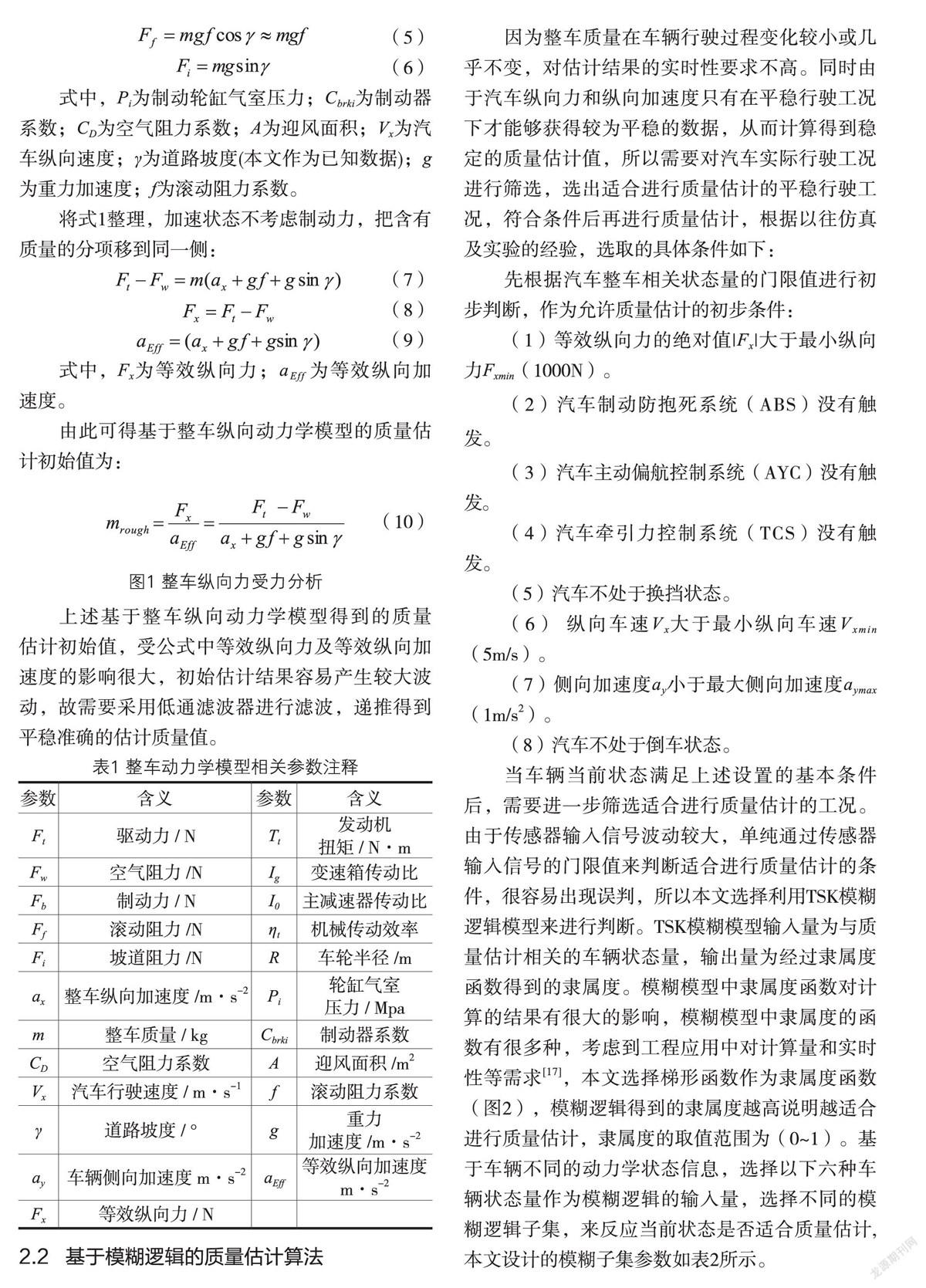
當車輛當前狀態滿足上述設置的基本條件后,需要進一步篩選適合進行質量估計的工況。由于傳感器輸入信號波動較大,單純通過傳感器輸入信號的門限值來判斷適合進行質量估計的條件,很容易出現誤判,所以本文選擇利用TSK模糊邏輯模型來進行判斷。TSK模糊模型輸入量為與質量估計相關的車輛狀態量,輸出量為經過隸屬度函數得到的隸屬度。模糊模型中隸屬度函數對計算的結果有很大的影響,模糊模型中隸屬度的函數有很多種,考慮到工程應用中對計算量和實時性等需求[17],本文選擇梯形函數作為隸屬度函數(圖2),模糊邏輯得到的隸屬度越高說明越適合進行質量估計,隸屬度的取值范圍為(0~1)。基于車輛不同的動力學狀態信息,選擇以下六種車輛狀態量作為模糊邏輯的輸入量,選擇不同的模糊邏輯子集,來反應當前狀態是否適合質量估計,本文設計的模糊子集參數如表2所示。
(1)等效縱向力與等效縱向力低通濾波值的差值越小,說明等效縱向力的變化越小,故使用模糊S子集進行隸屬度計算,輸入量為|Fx-Fxfilter|。
(2)當前周期等效縱向力濾波值與上周期等效縱向力濾波值的差值越小,說明等效縱向力的變化越小,故使用模糊S子集進行隸屬度計算,輸入量為|ΔFxfliter|。
(3)等效縱向力絕對值越大,等效縱向力受噪聲影響的相對程度越小,故使用模糊L子集進行隸屬度計算,輸入量為|Fx|。
(4)當等效縱向加速度越大,等效縱向加速度受噪聲影響的相對程度越小,故使用模糊L子集進行隸屬度計算,輸入量為|aEff|。
(5)當側向加速度越小,說明汽車趨于穩定直線行駛狀態,故使用模糊S子集進行隸屬度計算,輸入量為|ay|。
(6)過小的車速會受到低檔位振動的影響,過大的車速會造成空氣阻力過大,故選擇適中的車速,使用模糊M子集進行隸屬度計算,輸入量為|Vx|。
相關的模糊邏輯表達式如下式所示:
(11)
如果上述得到的質量估計隸屬度(Wem)大于允許質量估計隸屬度的閾值(0.6),則允許進行下述的質量估計自適應濾波策略。
由式(8)可以得到質量估計的粗略值mrough 。由于初步得到的質量估計粗略值波動很大,所以需要選用低通濾波器進行濾波,得到平穩的質量估計數值。本文主要采用兩次低通濾波,首次低通濾波根據質量估計信息自適應改變低通濾波系數,第二次低通濾波采用定值長周期濾波系數,減少估算結果的突變,防止因估計質量的突然變化對下述減速度控制造成不良影響。
上述得到的質量估計隸屬度越高,說明質量估計的粗略值的置信度越高,此時應選取較大的濾波系數,根據上述得到的質量估計隸屬度,可以得到首次低通濾波的初始濾波系數:
(12)
式中,Cfilterraw為首次低通濾波的初始濾波系數,C為隸屬度到濾波系數的轉換值。
在質量估計的初期,為了使質量估計結果進行快速度收斂,此時應該具有較大的首次低通濾波系數,隨著質量估計的值逐漸接近真實的質量值,此時應該減小首次低通濾波系數,以此維持以往較為準確的估計結果,減少估計噪聲信號帶來的影響。
為了使首次低通濾波系數隨著質量估計周期的推移逐漸減小,考慮使用質量估計隸屬度的積分值作為改變濾波系數的影響因子之一,隨著估計周期的推移,質量估計隸屬度的積分值逐漸增大,首次低通濾波系數逐漸減小。質量估計隸屬度的積分值為:
(13)
(14)
式中:MIN表示兩者取較小值,IWem為質量估計隸屬度的積分值,IWemmax為質量估計隸屬度積分值的閾值。
同時為了濾去估計噪聲信號,考慮使用估計質量首次濾波結果與二次濾波結果的差值作為改變濾波系數的影響因子之一,兩者差值越大說明質量估計結果波動越大,此時應減小首次低通濾波系數。估計質量首次濾波結果與二次濾波結果差值的絕對值為:
(15)
將md作為輸入量,使用模糊S子集進行隸屬度計算,輸出量為Id。
(16)
式中,Wuw為首次濾波系數的隸屬度。
如果首次濾波系數的隸屬度Wuw取值小于0.03,則濾波系數不變:
(17)
如果首次濾波系數的隸屬度Wuw取值在(0.03,0.125)之間,則濾波系數除以16;
(18)
如果首次濾波系數的隸屬度Wuw取值在(0.125,0.25)之間,則濾波系數除以64;
(19)
如果首次濾波系數的隸屬度Wuw取值大于0.25,則濾波系數除以128;
(20)
根據上述得到的首次低通濾波系數,可以得到首次濾波后的估計質量:
(21)
將首次濾波后的估計質量進行二次定值長周期低通濾波,長周期低通濾波雖然降低了估計質量的收斂速度,但是能夠濾除估計質量原始值的大幅度波動,估計質量能夠相對平穩地收斂到理想結果。
(22)
式中,m為最終估計質量,ClongT為定值長周期濾波系數。
如果經過二次濾波后的估算質量結果長時間保持不變或變化幅度在很小的范圍內,說明此時估算質量已經趨于收斂,此時記錄當前估算質量結果作為最終估計值,且估計算法終止運行,從而能夠減少計算量,提高控制器運算效率。待車速為0后,車輛重新行駛時,再進行上述算法對質量進行重新估計。
3 ? ?基于“前饋+反饋PID”的減速度控制
為了實現線控制動系統減速度控制功能,本文采用了工程中常用的“前饋+反饋PID”控制[18-19],通過調節控制器參數控制實際減速度與期望減速度一致。該控制方式具有很強的魯棒性,更能適應商用車質量多變、響應延遲大的特點。
本文設計的減速度控制流程如圖3所示,上層決策模塊下達車輛需求減速度指令,若同時存在多個上層控制指令則需要進行減速度指令協調,取減速度絕對值的最大值作為協調減速度請求。
同時基于整車質量估計與車輛減速度估計為線控制動請求控制提供參考量。請求減速度與整車質量乘積作為前饋制動力,提供車輛達到期望減速度所需的基本制動力。實際減速度與期望減速度的偏差通過PID反饋控制器得到反饋制動力,提供車輛達到期望減速度所需的補償制動力。
前饋制動力與反饋制動力相加得到總體需求制動力,同時根據車輛穩定性、前后橋摩擦片磨損狀態進行前后橋需求制動力分配。前后橋摩擦片的磨損狀態主要通過傳感器獲得磨損信息,若無搭載相關傳感器也可通過摩擦磨損試驗建立摩擦片磨損特性模型[20],進而對摩擦片磨損信息進行觀測,由于制動力分配模塊不屬于本文研究內容的重點,故不再詳細描述。將前后橋需求制動力除以相應的制動器系數得到前后橋輪缸氣室需求壓力,將控制信號反饋給比例閥從而進行輪缸氣室壓力控制。
在向線控制動系統下達期望減速度指令的初期,由于氣體管路較長,氣體傳遞存在遲滯,導致制動氣室輪缸壓力建壓時間略有延遲,輪缸壓力從0bar到10bar用時大約為600-800ms,如果此時介入反饋控制會使比例閥指令壓力過高,使得實際減速度出現過大的超調量,影響減速度控制效果,故建壓延遲初期僅需介入前饋控制而不介入反饋控制。當制動氣室輪缸壓力達到前饋控制的壓力指令時,此時再同時介入前饋控制與反饋控制。
4 ? ?實車測試結果
本文選取解放JH6牽引車為測試樣車,牽引車驅動形式4×2,整車整備質量為6900kg,同時以黑河市北安極地測試基地為實車試驗路段。實車測試樣車如圖4所示。
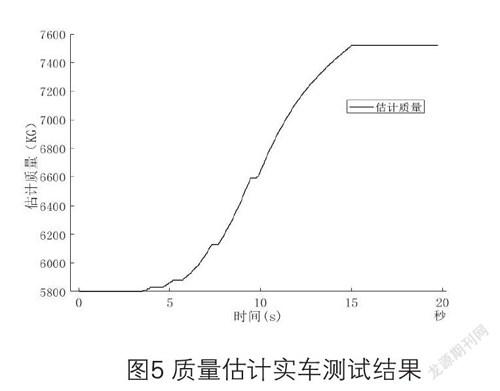
4.1 ? 質量估計算法實車驗證
質量估計算法的實車驗證結果如圖5所示,設置初始默認整車質量為5800kg,而實際整車整備質量為6900kg,車輛在符合質量估計的工況下,大約15秒內質量估計結果趨于穩定,相較于工程中常用的遞推最小二乘質量估計方法,其收斂時間在25秒以上[21],故該算法在收斂速度上有較大提升。收斂質量為7520kg,誤差約為8.99%,該誤差在減速度PID反饋控制的補償范圍之內,滿足減速度控制的要求,同時由于算法計算邏輯簡單,沒有大量的數值計算,可以很大程度地節省控制器的計算空間,節約計算成本。
4.2 ? 減速度控制實車驗證
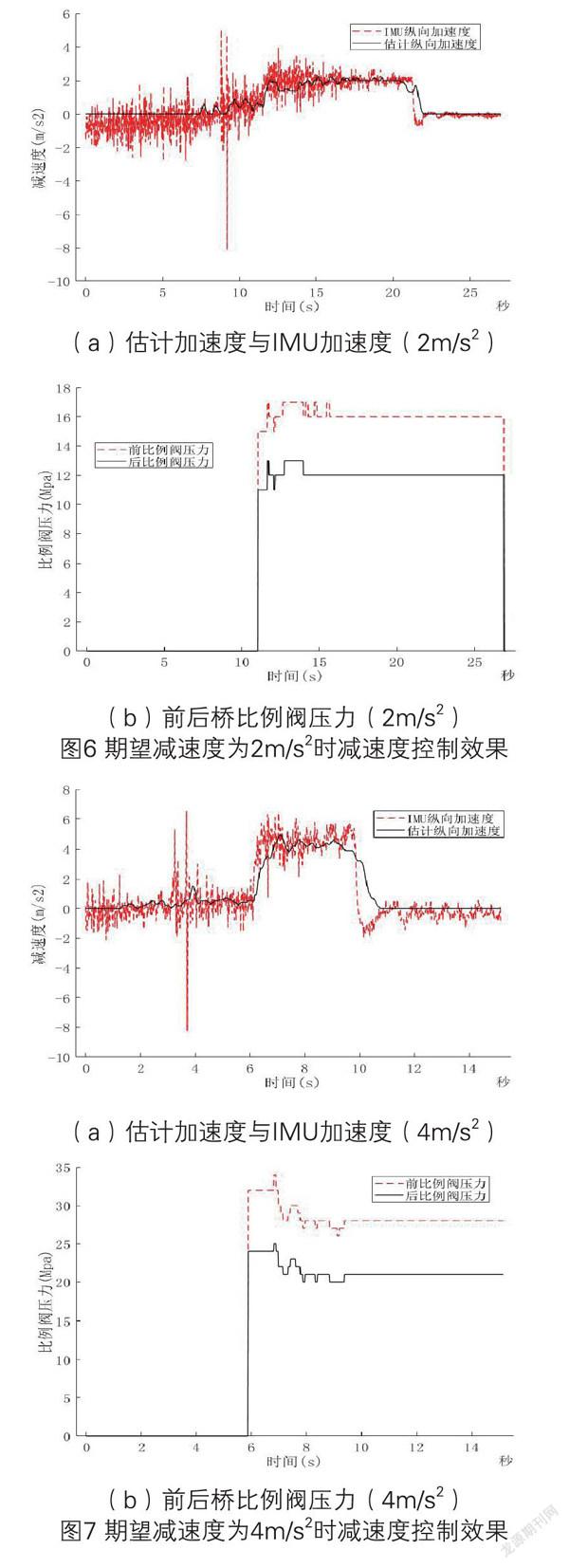
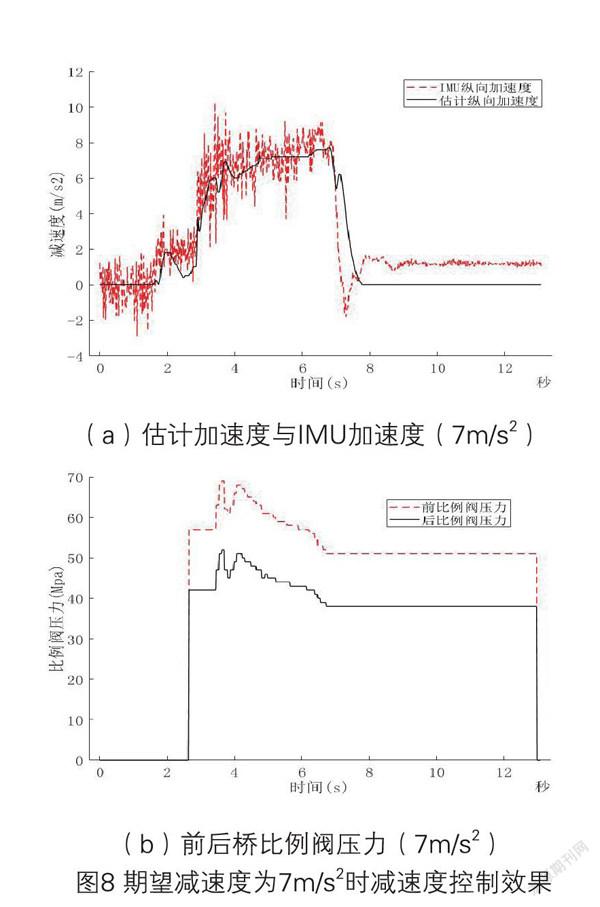
商用車一般配備制動防抱死系統(ABS),大力制動導致ABS觸發時車輛減速度波動較大,而輕微制動ABS未觸發時車輛速度與輪速接近,減速度波動也較小,故根據ABS是否觸發需要分別匹配PID參數,通過反復實車測試進行PID參數調節,當ABS沒有觸發時P=20,I=5,D=1,當ABS觸發時P=5,I=15,D=0。在路面附著系數為0.75的混凝土路面上分別設置期望減速度為2m/s2、4m/s2、7m/s2,制動初始速度為60m/s。
為了驗證實際減速度與期望減速度是否一致,本文作者在解放JH6實驗樣車中加入慣性傳感器(IMU),從而獲得參考縱向加速度,通過估計加速度與IMU加速度進行對比,從而驗證估計加速度的準確性。同時將IMU加速度與期望加速度進行對比,觀察減速度控制的控制效果。
由于在實車測試中IMU信號噪聲較大,無法準確獲得縱向加速度真值,但IMU加速度信號在縱向加速度真值附近上下波動,通過觀察IMU加速度信號上下浮動的中心位置,大致能夠為驗證估計加速度的準確性提供參考。當期望減速度為2m/s2以及4m/s2時,此時ABS沒有觸發,當期望減速度為7m/s2時,此時ABS觸發。從上面三組實驗的結果可以看出,無論ABS是否觸發,估計加速度與IMU加速度的大小以及變化趨勢都能保持一致,并且估計加速度在期望加速度數值附近略微波動,基本保持在期望加速度附近。同時前后橋比例閥壓力在制動初期保持穩定,僅由前饋控制進行調節,當制動氣室充分建壓后,再根據減速度反饋誤差結果進行壓力調節。上述實驗結果驗證了本文設計的減速度控制器具有很好的控制效果。
5 ? ?結束語
(1)氣壓線控制動系統是未來無人駕駛商用車的關鍵執行機構,本文設計了一種基于商用車質量估計的線控制動系統減速度控制方法,為氣壓線控制動減速度控制提供算法支持。
(2)本文提出了一種基于模糊邏輯的自適應濾波系數商用車質量估計算法,在保證估計質量結果準確的情況下,減少占用控制器的計算資源。基于車輛縱向動力學模型得到估計質量的原始值,通過當前車輛狀態利用模糊邏輯規則自適應調節估計質量原始值的濾波系數,給予可信度更高的估計質量的原始值更高的權重,讓估計質量快速收斂,同時濾去可信度較低的原始估計值噪聲,使估計質量結果趨于穩定。經實車測試,質量誤差約為8.99%,估計效果滿足減速度控制要求。
(3)基于質量估計與減速度估計結果,按照駕駛員或者主動制動模塊要求的期望減速度進行“前饋+反饋PID”控制,同時考慮ABS對減速度估算結果的影響,根據ABS是否觸發,配匹兩套PID參數。在實車實驗中分別設置期望減速度2m/s2、4m/s2、7m/s2。觀察實車數據,驗證了減速度控制算法具有很好的控制效果。
綜上所述,本文提出的基于質量估計的商用車線控制動系統減速度控制算法,能夠滿足未來無人駕駛汽車線控制動的需求,準確快速地執行上層制動指令,為未來無人駕駛汽車的落地提供底層控制算法。在未來研究中,還需要進一步考慮線控制動期望減速度的變化趨勢,使之與真實駕駛員踩踏制動踏板產生的減速度變化趨勢一致[22],避免期望減速度突然增大,從而提升車內成員乘坐的舒適性。
參考文獻:
[1]李亮,王翔宇,程碩,等. 汽車底盤線控與動力學域控制技術[J]. 汽車安全與節能學報,2020,11(2): 143-160.
[2]王建萍,何力. 干線物流無人駕駛卡車市場化挑戰[J].汽車與配件,2021, 2(2): 56-59.
[3]陳倩.商用車氣壓制動系統動態特性仿真研究[D].長春:吉林大學, 2015.
[4]曲輔凡.線控氣壓復合制動系統控制及硬件在環仿真研究[D].哈爾濱:哈爾濱工業大學,2017.
[5]楊坤,肖錦釗,王杰,等.考慮踏板速度的駕駛員制動強度識別研究[J].河南科技大學學報(自然科學版),2021,42(3) : 33-37.
[6]徐勇兵. 基于汽車質量識別的商用車下坡車速規劃研究[D]. 武漢:武漢理工大學,2019.
[7]胡滿江,羅禹貢,陳龍,等. 基于縱向頻響特性的整車質量估計[J]. 吉林大學學報(工學版),2020,11(2): 978-983.
[8]MCINTYRE M L,GHOTIKAR T J,VAHDI A,et al. A two-stage Lyapunov-based estimator for estimation of vehicle mass and road grade[J]. IEEE Transactions on Vehicular Technology,2009,58(7):3177-3158.
[9]雷雨龍,付堯,劉科.基于擴展卡爾曼濾波的車輛質量與道路坡度估計[J].農業機械學報,2014,11(11): 13-18.
[10]任志英,沈亮量,黃偉,等. 基于AEKF的車輛質量與道路坡度實時估計[J]. 振動、測試與診斷,2020,40(4): 759-764.
[11]楊財,宋健. ABS/TCS/AYC中參考車速和滑移率算法研究[J]. 汽車工程,2009,31(1): 25-27.
[12]戴希. 基于多傳感器信息融合的車輛縱向車速估計方法研究[D]. 秦皇島:燕山大學,2018.
[13]Lee H. Reliability Indexed Sensor Fusion and Its Application to Vehicle Velocity Estimation[J]. Journal of Biological Chemistry,2006,249(17): 5614-5622.
[14]Wenzel T A, Burnham K J, Blundell M V,et al. Dual extended Kalman filter for vehicle state and parameter estimation[J]. Vehicle System Dynamics,2006,44(2): 153-171.
[15]孫萬峰.商用車牽引力與制動力集成控制算法研究[D]. 長春:吉林大學,2010.
[16]陳鵬飛. 汽車動力學控制系統中的狀態參數實時估計與工程應用[D]. 長春:吉林大學,2018.
[17]RAJAMANI R. 車輛動力學及控制[M].2版. 王國業,譯. 北京:機械工業出版社,2018.
[18]來飛,葉心. 汽車高速行駛時自動緊急轉向避撞的前饋與反饋跟蹤控制的研究[J]. 汽車工程, 2020,42(10): 1405-1411.
[19]冀同濤,李剛,王明家,等. 基于前饋和反饋相結合的路徑跟蹤算法[J]. 汽車工程師,2019, 7(7): 19-22.
[20]李玉龍.盤式制動器摩擦特性及其熱力耦合分析[D].太原:太原理工大學,2020.
[21]李明陽.應用于商用車EPB系統的車輛質量識別方法的研究[D]. 南京:南京理工大學,2018.
[22]李剛,楊志,吳迪,等.汽車兩級自動緊急制動系統控制研究[J].機械設計與制造,2020,7(7) : 134-138.
專家推薦語
葉曉明
東風汽車集團有限公司技術中心
架構中心副總監 ?高級工程師
本論文研究的減速度控制是商用車自動駕駛技術的重要組成部分,算法計算量小,可有效降低計算負荷,具備較高的研究及實用價值。