永磁同步電機GWO-PID優(yōu)化控制
2022-03-07 10:11:24張俊杰李昕濤
電子測試 2022年24期
關(guān)鍵詞:優(yōu)化
張俊杰,李昕濤
(太原科技大學電子信息工程學院,山西太原,030024)
0 引言
永磁同步電機具有結(jié)構(gòu)簡單、響應速度快等優(yōu)點,在電動汽車和工業(yè)設備等領(lǐng)域得到了廣泛關(guān)注與應用。但PMSM的參數(shù)易受環(huán)境影響,如溫度變化會引起定子電阻和磁鏈變化、磁飽和會引起dq軸電感變化等,從而導致 PMSM 驅(qū)動系統(tǒng)性能下降。因此,為了達到高性能電機控制的目的,獲得精確的電機參數(shù)和數(shù)學模型對改善 PMSM 的控制性能至關(guān)重要[1]。
控制系統(tǒng)中傳統(tǒng)參數(shù)辨識方法,通過文獻分析可知,這些方法均有利有弊,其中突出的一個缺點是這些方法并未考慮PMSM本身的非線性因素,導致辨識精度受到一定的影響[2]。而群智能優(yōu)化算法憑借其考慮到問題非線性影響的特點,在PMSM參數(shù)辨識中得到了廣泛研究與應用。采用群智能優(yōu)化算法進行參數(shù)辨識已成為目前重要的解決方案之一。
研究人員通過對大自然的觀察仍在不斷提出新的優(yōu)化算法,例如學者Seyedali Mirjalili通過對大自然中肉食動物捕獵的觀察提出灰狼優(yōu)化算法(grey wolf optimization algorithm,GWO)。在函數(shù)優(yōu)化方面,已經(jīng)證明GWO的收斂速度和求解精度均優(yōu)于PSO。因此,GWO算法廣泛應用于無人作戰(zhàn)飛行器路徑規(guī)劃、聚類分析、特征子集選擇、經(jīng)濟調(diào)度指派、直流電機最優(yōu)控制、多輸入多輸出電力系統(tǒng)等諸多領(lǐng)域[3]。由于GWO算法提出的時間不長,因此其理論研究尚未成體系,多數(shù)學者都是從特定角度,針對具體問題對GWO進行改進和應用研究。灰狼優(yōu)化算法模型簡便、可實現(xiàn)性強,在諸多領(lǐng)域的優(yōu)化表現(xiàn)不亞于其他元啟發(fā)式群智能算法。本文將選擇該算法進行改進,并在多參數(shù)辨識中得到了實際運用。課題組以永磁同步電機系統(tǒng)轉(zhuǎn)速為研究對象,將灰狼優(yōu)化算法(GWO)與PID控制器互相結(jié)合,并在Simulink中由GWO-PID在線對系統(tǒng)進行辨識,根據(jù)辨識得到的靈敏度信息整定 PID 控制參數(shù),最后通過仿真驗證了該方法的有效性。
1 永磁同步電機模型
永磁同步電機主要的部件是定子、轉(zhuǎn)子、端蓋。定子部分由電樞鐵心和三相對稱電樞繞組二部分組成,通過疊片的方式來減少電機運行時的鐵損,與普通感應電機無太大區(qū)別。其中鐵心槽中嵌著電樞繞組。轉(zhuǎn)子是由導磁軛、轉(zhuǎn)軸、永磁體構(gòu)成的。導磁軛往往是以圓筒的形狀,并套在軸上的,與此同時緊貼著永磁體。在定子與轉(zhuǎn)子之間存在一段氣隙部分,轉(zhuǎn)子在定子部分內(nèi)的旋轉(zhuǎn)運動所需要的空間由此氣隙部分所提供。很多電磁過程和參數(shù)的研究主要發(fā)生在這一區(qū)域,所以該氣隙部分作為一部分內(nèi)部結(jié)構(gòu),其形狀、長短均會影響永磁同步電機的力學、電磁性能,而且還與電機的雜散損耗與工藝裝配相關(guān)。就永磁同步電機而言,轉(zhuǎn)子中永磁鐵因其安裝部位的差異而產(chǎn)生的磁路結(jié)構(gòu)也有差異,電機有類別主要有三種:內(nèi)埋式、凸裝式、嵌入式。
在d-q坐標系下的永磁同步電機系統(tǒng),其數(shù)學模型為:
電壓方程:
式中:Ud和Uq分別為d軸和q軸上定子電壓分量,Rs為定子電阻,id和iq分別為d軸和q軸上定子電流分量,Ld和Lq分別為d軸和q軸上定子電感分量,ω為轉(zhuǎn)子機械角速度,?f為永磁體磁鏈,p為極對數(shù)。
電磁矩陣方程:
式中Te為電磁轉(zhuǎn)矩。
電磁轉(zhuǎn)矩方程在有負載的情況下與負載轉(zhuǎn)矩還應滿足:
式中:TL為負載轉(zhuǎn)矩,J為轉(zhuǎn)動慣量,B為摩擦因數(shù)。
為了實現(xiàn)d軸和q軸的電流靜態(tài)解耦,矢量控制時 id= 0,所以式(5)可以簡化為:
由上述式子可以看出,永磁同步電機的數(shù)學模型具有非線性,并且和負載轉(zhuǎn)矩關(guān)聯(lián)性強。在永磁同步電動機中,存在著一種具有電磁場的相互聯(lián)系,其電磁場的微分方程一般為含有一系列可變因子的微分方程,而系數(shù)是以時間為變量的函數(shù)并根據(jù)轉(zhuǎn)子與定子相對位置而變化。一方面,轉(zhuǎn)子與定子的位置變化是非線性的,而且微分方程的變量包括定子電流、轉(zhuǎn)子磁鏈等。永磁同步電機是非線性多變量系統(tǒng)的一種。另一方面,定子和轉(zhuǎn)子之間的耦合關(guān)系由磁場決定,在一般坐標系中,電機定轉(zhuǎn)子在電磁結(jié)構(gòu)上的不對稱性,使得電機數(shù)學模型可以從由轉(zhuǎn)子瞬時位置所形成的非線性時變方程進行轉(zhuǎn)變。所以在對同步電機控制系統(tǒng)進行精準分析與研究往往比較困難,需要對同步電機進行一些細節(jié)理想化處理,并根據(jù)不同的需求來選擇應用其中一種模型或是結(jié)合每一種模型的優(yōu)點綜合化分析處理。
忽略以下干擾條件:(1)磁路飽和、磁滯、渦流;(2)永磁體的阻尼作用、轉(zhuǎn)子中的阻尼繞組;(3)磁路中的高次諧波磁勢。
遵循以下條件:(1)電動機的磁回路是線性的,利用疊加理論對電動機的磁力參數(shù)進行計算;(2)在各自的繞組軸線上有120的電角度差異的三相對稱的定子繞組;(3)氣隙磁路中定子電流僅發(fā)生正弦磁勢,而定子電位為正弦形變化;(4)三相繞組采用Y形的定子繞組,并采用正弦波形的相繞組的感應電位;(5)定子氣隙處的永久磁鐵的磁場強度為正弦形;(6)鐵芯具有無限大的磁導率,而轉(zhuǎn)子永磁體的導電系數(shù)為0;(7)電機運行時所有繞組電感及電阻等參數(shù)恒定;(8)永磁體內(nèi)部磁導率等于空氣。
2 灰狼優(yōu)化算法
GWO算法的靈感來源之一是狼群社會等級分布。狩獵灰狼群體一般為5~12只,為了體現(xiàn)出灰狼社會等級的分布,將最優(yōu)解定義為ɑ狼,依次按β、δ、ω的順序排列。整個灰狼群體由а狼指揮,它又稱為領(lǐng)頭狼,負責狼群各項事宜決策;β狼又稱為副領(lǐng)頭狼,聽從ɑ狼命令,輔助ɑ狼進行決策,管轄除ɑ狼以外的其他狼;δ狼被稱為普通狼,服從ɑ狼和β狼命令,在狼群中起到放哨、偵察等作用;ω狼被稱為底層狼,它等級不高但數(shù)量多,聽令于上面3個等級的灰狼。狼群位置主要由ɑ狼和β狼指揮,整個狼群的位置隨ɑ狼的位置更新。灰狼狩獵分為3個步驟:首先,狼群搜索獵物;然后,ɑ狼帶領(lǐng)狼群包圍獵物;最后,在狼群慢慢靠近獵物過程中,逐步縮小包圍圈,ɑ狼指揮其余狼發(fā)起攻擊,不斷更新包圍圈里狼群位置。
灰狼圍獵的數(shù)學模型為
式中:t為當前迭代次數(shù);X為灰狼所處位置;Xp為獵物所處位置;A為包圍步長;C為方向向量,計算公式為:
式中r1和r2為[0,1]之間的隨機向量。灰狼捕獵的位置更新公式為:
式中:X1、X2和X3分別表示狼群中ω向α、β、δ移動的步長和方向;X(t+1)定義了最終位置即表示其余灰狼ω向獵物移動的方向。
灰狼能夠識別獵物的位置并包圍它們。當灰狼識別出獵物的位置后,β和δ在ɑ的帶領(lǐng)下指導狼群包圍獵物。在優(yōu)化問題的決策空間中,我們對最佳解決方案(獵物的位置)并不了解。因此,為了模擬灰狼的狩獵行為,我們假設ɑ,β和δ更了解獵物的潛在位置。我們保存迄今為止取得3個最優(yōu)解決方案,并利用這三者的位置來判斷獵物所在的位置,同時強迫其他灰狼個體(包括ω)依據(jù)最優(yōu)灰狼個體的位置來更新其位置,逐漸逼近獵物。狼群內(nèi)個體跟蹤獵物位置的機制。
GWO算法的優(yōu)化從隨機創(chuàng)建一個灰狼種群(候選方案)開始。在迭代過程中ɑ、β和δ狼估計獵物的可能位置(最優(yōu)解)。灰狼根據(jù)它們與獵物的距離更新其位置。為了搜索過程中的勘探和開發(fā),參數(shù)a應該從2遞減到0。如果|A→|>1,候選解遠離獵物;如果|A→|<1,候選解逼近獵物。GWO算法流程圖如圖1所示。
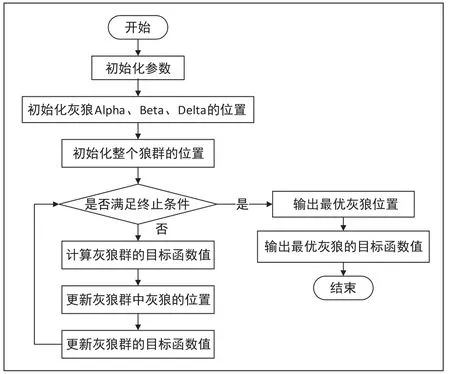
圖1 灰狼優(yōu)化算法的流程圖
3 系統(tǒng)仿真
本節(jié)通過GWO算法在電機參數(shù)辨識中的辨識效果來驗證融合后的算法相較于無算法的PID控制具有更高的精度和更快的速度。本次算法需將迭代次數(shù)設置為100,用以獲得最優(yōu)參數(shù)值,種群數(shù)量設置為50,故迭代一次系統(tǒng)需運行五十次尋求單次迭代最優(yōu)值。在仿真實驗中,使用Matlab中的Simulink,建立辨識仿真圖,如圖2所示。仿真實驗空載情況下的轉(zhuǎn)速曲線圖如圖3,轉(zhuǎn)矩曲線圖如圖4,電流曲線圖如圖5。仿真實驗結(jié)果帶負載轉(zhuǎn)速曲線圖如圖6所示,轉(zhuǎn)矩曲線圖如圖7所示,電流圖如圖8所示。
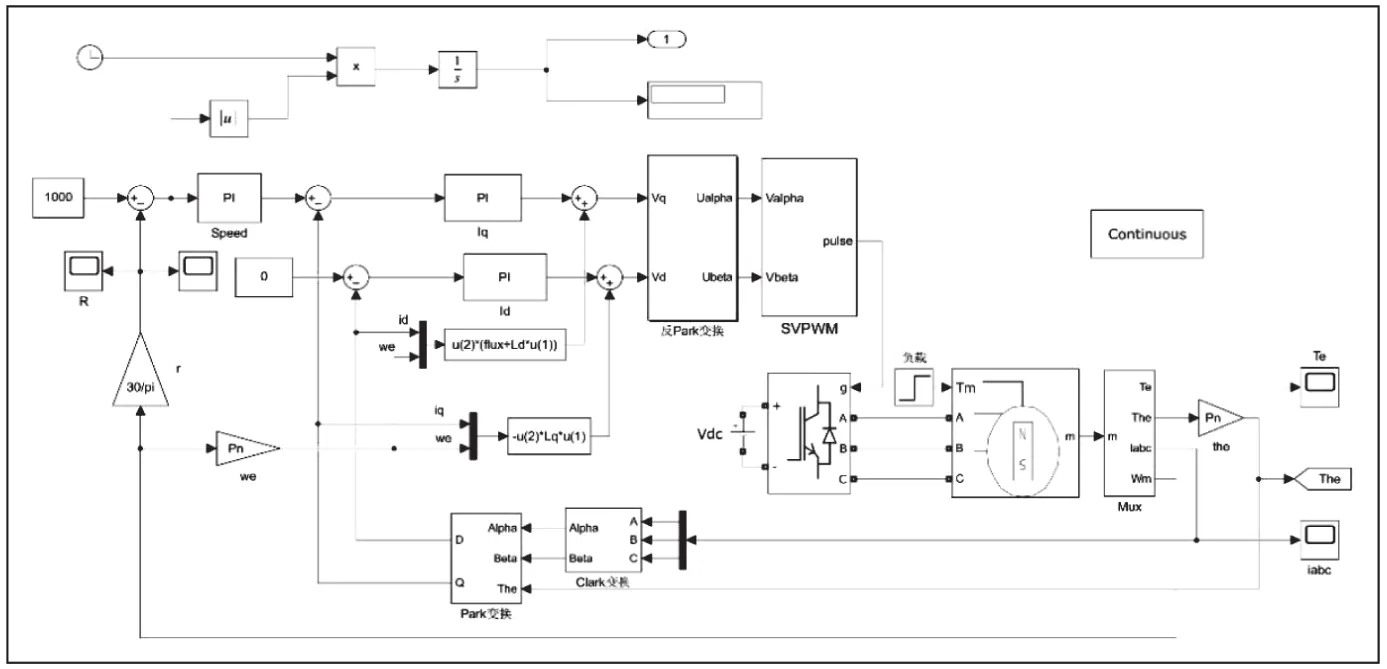
圖2 系統(tǒng)Simulink仿真模型
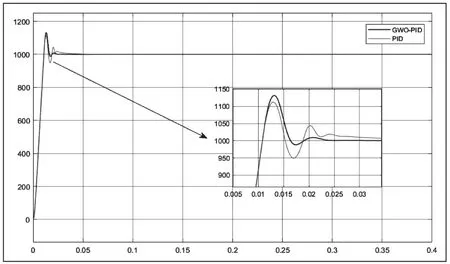
圖3 空載轉(zhuǎn)速曲線
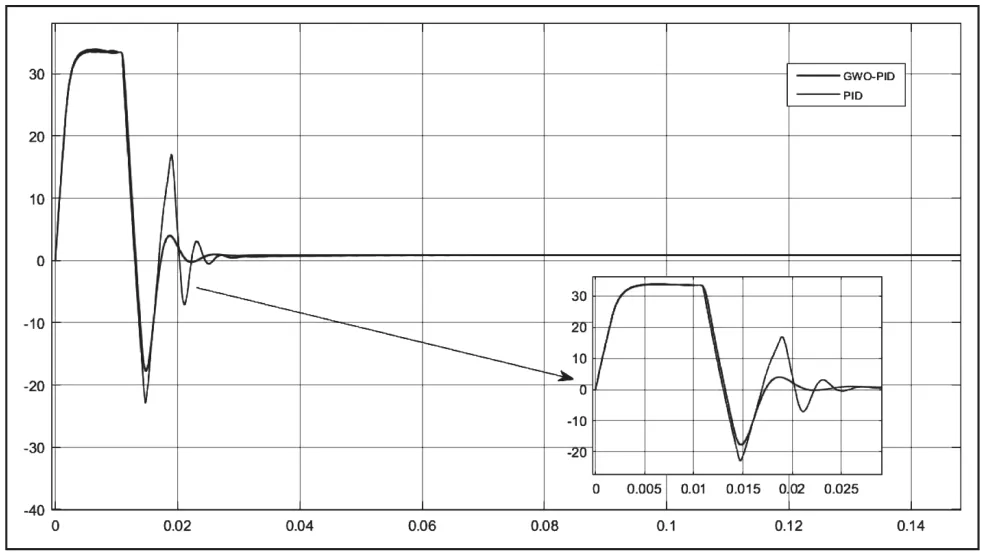
圖4 空載轉(zhuǎn)矩曲線
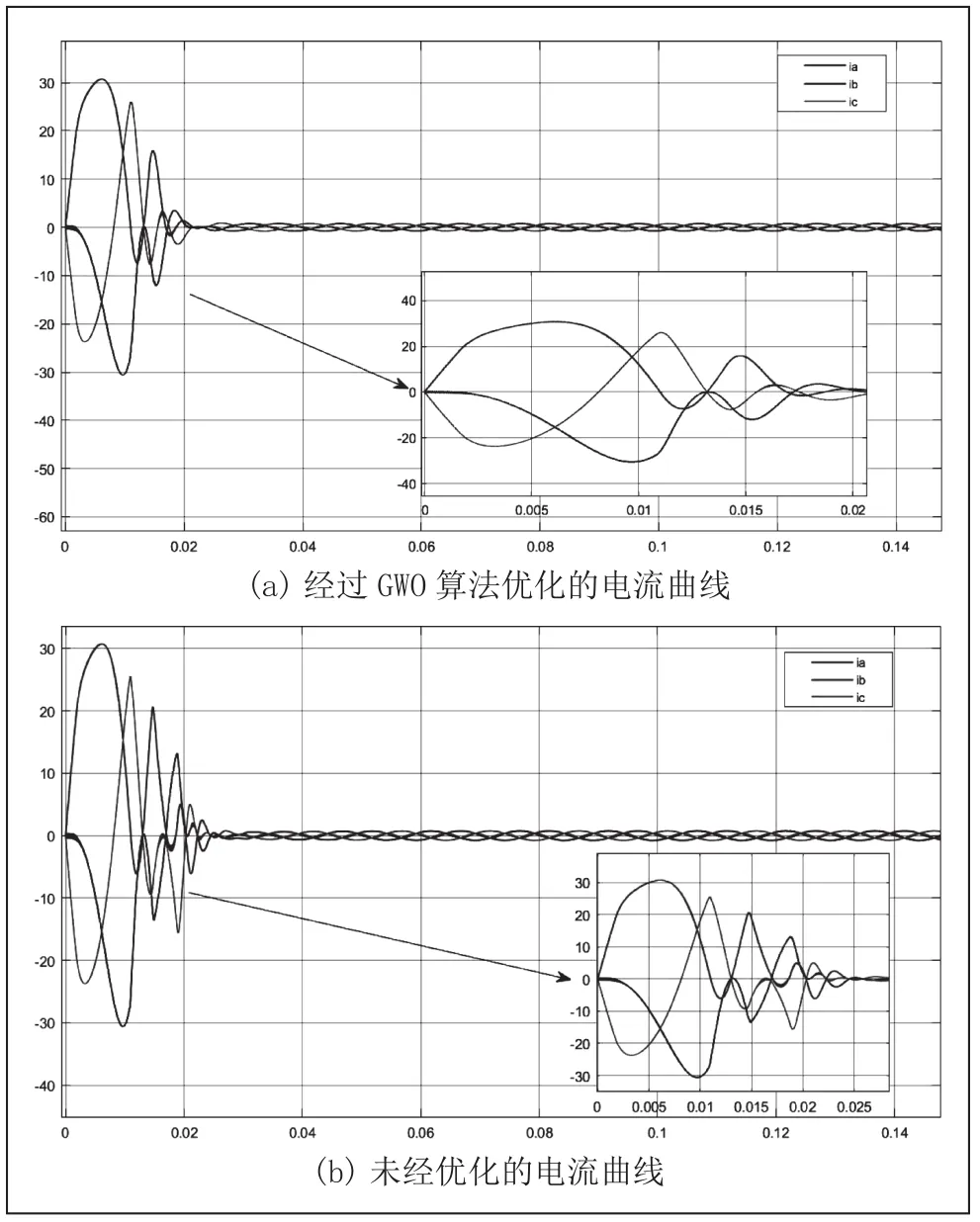
圖5 空載三相電流曲線
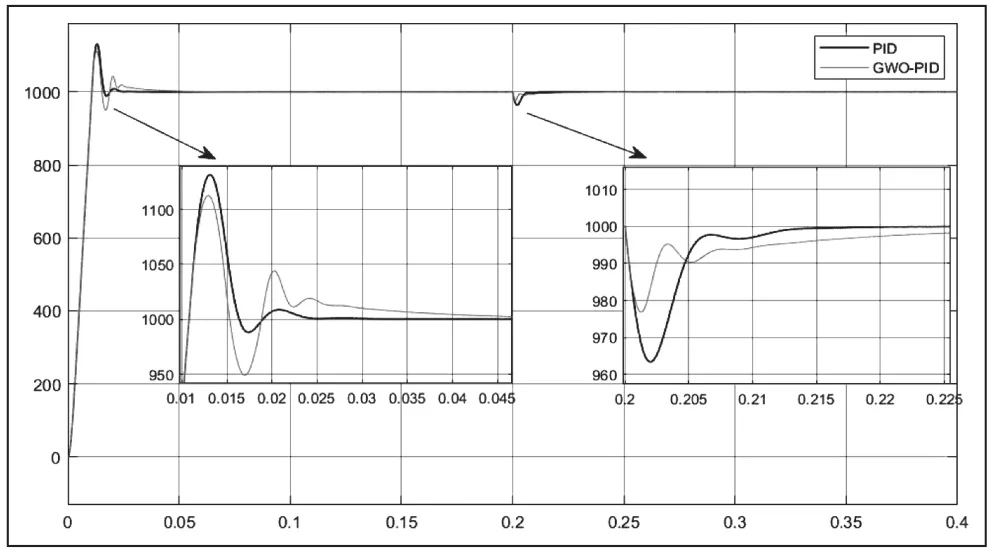
圖6 帶負載轉(zhuǎn)速曲線
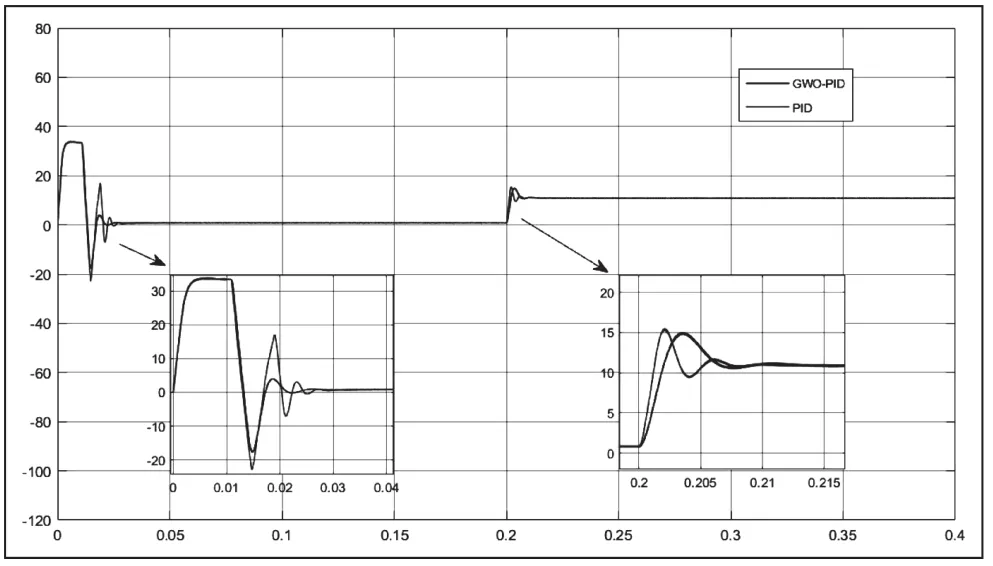
圖7 帶負載轉(zhuǎn)矩曲線

圖8 負載三相電流曲線
4 結(jié)語
永磁同步電機控制系統(tǒng)由于其具有高效、簡單、易控的特點在現(xiàn)代工業(yè)生產(chǎn)中應用得愈發(fā)廣泛。另一方面,完整高效的控制系統(tǒng)的運行需要精準的參數(shù)以支撐,而永磁同步電機處于運行狀態(tài)中其重要參數(shù)會因為某些不可抗拒的因素而有所偏差,所以選擇適當?shù)谋孀R方法來精準地估計此類變化的參數(shù)是非常有必要的。針對永磁同步電機矢量控制系統(tǒng),課題組設計了基于灰狼優(yōu)化算法(GWO)的 PID 控制器,根據(jù)優(yōu)化算法的辨識的靈敏度信息對 PID 參數(shù)進行再整定,通過在 Simulink 中進行仿真驗證基于GWO優(yōu)化算法的 PID控制器控制效果更好。并且GWO算法的每次迭代的計算數(shù)量可以根據(jù)具體情況更改,算法復雜度較低,后續(xù)可以在嵌入式控制設備中進一步移植與應用。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45