小龍蝦頭尾定向裝置設(shè)計(jì)及試驗(yàn)
2022-03-09 13:35:36傅潤澤
食品與機(jī)械 2022年2期
傅潤澤
王愛民1
陳洪興1
潘鳳濤2
潘海艷2
(1. 鹽城工學(xué)院海洋與生物工程學(xué)院,江蘇 鹽城 224051;2. 鹽城市怡美食品有限公司,江蘇 鹽城 224341)
小龍蝦(Procambarusclarkii),也稱克氏原螯蝦,近年來其產(chǎn)業(yè)呈加速增長態(tài)勢,養(yǎng)殖產(chǎn)量和規(guī)模大幅增長[1-2]。然而小龍蝦加工的前處理均是由工人手工完成,勞動(dòng)成本高,加工速度和產(chǎn)量難以提高,而且很多企業(yè)還有招工難的困境。關(guān)于蝦類的機(jī)械化加工研究主要集中在對蝦、沼蝦等一些產(chǎn)業(yè)成熟的蝦類品種上,如滾軸擠壓剝殼等脫殼技術(shù)[3-5]。而針對小龍蝦機(jī)械化前處理的研究較少,包括自動(dòng)化清洗分級[6-7]、超高壓脫殼[8-11]等。水產(chǎn)品機(jī)械化加工的前提是機(jī)械化定向,目前有關(guān)魚類的頭尾定向、腹背定向研究較多[12-14],但其定向機(jī)理對小龍蝦無借鑒意義。其他蝦類如對蝦的定向研究也有報(bào)道[15-16],但小龍蝦機(jī)械化頭尾定向的困難之處在于其形態(tài)特征與對蝦等蝦類存在巨大差異,小龍蝦體型較大, 頭大尾小,蝦體粗短,與細(xì)長蝦類相比更難定向;其次小龍蝦熟制后尾部卷起,整體呈梭形,導(dǎo)致其在放置時(shí)具有不穩(wěn)定性,增加了定向難度;同時(shí)小龍蝦蝦螯較長,不利于其在傳統(tǒng)技術(shù)上定向,而有關(guān)小龍蝦機(jī)械化頭尾定向的研究尚未見報(bào)道。研究擬利用小龍蝦頭尾形態(tài)差異,提出一種小龍蝦頭尾定向方法,對小龍蝦頭尾定向裝置進(jìn)行設(shè)計(jì)與試驗(yàn),以期為小龍蝦定向設(shè)備的研發(fā)提供依據(jù)。
1 小龍蝦頭尾定向裝置設(shè)計(jì)與工作原理
1.1 頭尾定向裝置總體結(jié)構(gòu)
小龍蝦頭尾定向裝置由滾軸輸送分級機(jī)構(gòu)、頭尾定向機(jī)構(gòu)及相關(guān)輔助機(jī)構(gòu)組成,其整體效果如圖1所示。

圖1 小龍蝦頭尾定向裝置整體效果圖Figure 1 Structural schematic sketch of device forcrawfish head and tail orientation
1.2 頭尾定向機(jī)構(gòu)
小龍蝦頭尾定向機(jī)構(gòu)由頭尾定向輸送帶、上輸送帶、下輸送帶以及帶有撥片的固定撥桿組成。頭尾定向輸送帶為垂直方向的長環(huán)狀輸送帶,由一定數(shù)量的頭尾定向槽構(gòu)成(圖2),頭尾定向槽下方設(shè)有帶彈簧的蝦螯捕捉網(wǎng)(尼龍繩網(wǎng)),由金屬外框和繃緊的繩網(wǎng)構(gòu)成,繩網(wǎng)空隙大于蝦螯而小于蝦尾。頭尾定向槽下方兩側(cè)設(shè)有固定撥桿,撥桿頂端設(shè)有向內(nèi)伸出的撥片。頭尾定向槽運(yùn)動(dòng)時(shí)撥片可以碰到蝦螯捕捉網(wǎng)。

圖2 單個(gè)頭尾定向機(jī)構(gòu)效果簡圖
1.3 工作原理
頭尾定向裝置工作原理:當(dāng)頭尾定向槽寬度小于額劍到龍蝦腹部彎曲部分的距離時(shí),小龍蝦由分級輸送裝置掉落后進(jìn)入頭尾定向槽,分為頭上尾下和頭下尾上兩種情況,小龍蝦繼續(xù)下落,碰到蝦螯捕捉網(wǎng)。
(1) 頭下尾上小龍蝦蝦螯或尖銳額劍被繩網(wǎng)勾住,無法下落;頭上尾下小龍蝦因?yàn)槭熘坪笪膊繄A鈍,繩網(wǎng)無法勾住,一部分直接落入下方的上輸送帶槽內(nèi),上輸送帶與頭尾定向輸送帶同步同速運(yùn)動(dòng);頭上尾下小龍蝦也有可能因?yàn)槟Σ亮Φ仍虿荒苤苯拥粝拢A粼谖r螯捕捉網(wǎng)上,如圖3所示。

圖3 頭尾定向裝置工作步驟1Figure 3 Working step 1 of head and tail orientationdevice
(2) 隨著輸送帶的運(yùn)動(dòng),上撥片與蝦螯捕捉網(wǎng)碰觸,產(chǎn)生輕微震顫,使小龍蝦落入下方上輸送帶槽內(nèi),輸送帶運(yùn)動(dòng)過程中根據(jù)工藝設(shè)置多個(gè)固定撥桿和撥片,保證小龍蝦全部落下。而頭下尾上小龍蝦因?yàn)槲r螯或尖銳額劍被勾住無法下落,如圖4所示。

圖4 頭尾定向裝置工作步驟2Figure 4 Working step 2 of head and tailorientation device
(3) 頭下尾上小龍蝦隨著投喂定向槽繼續(xù)運(yùn)動(dòng),并完成垂直方向的掉頭,頭尾定向槽掉頭后的下方設(shè)有下輸送帶,一部分小龍蝦因?yàn)橹亓σ蛩氐袈溥M(jìn)入下方下輸送帶槽內(nèi)。另一部分因?yàn)槔K網(wǎng)的鉤掛等原因不能直接掉下,而停留在蝦螯捕捉網(wǎng)上。隨著輸送帶的運(yùn)動(dòng),下?lián)芷c蝦螯捕捉網(wǎng)碰觸,產(chǎn)生震顫,下?lián)芷c蝦螯捕捉網(wǎng)的碰觸面積大于上撥片,震顫幅度加大,小龍蝦落入下方下輸送帶槽內(nèi),輸送帶運(yùn)動(dòng)過程中有多個(gè)固定撥桿和撥片,保證小龍蝦全部落下,如圖5所示。

圖5 頭尾定向裝置工作步驟3Figure 5 Working step 3 of head and tailorientation device
2 小龍蝦頭尾定向受力分析
對小龍蝦頭尾定向進(jìn)行受力分析[17],定向槽各參數(shù)見表1。

表1 定向槽各參數(shù)Table 1 Parameters of directional slot
2.1 小龍蝦頭朝下進(jìn)入定向槽
當(dāng)小龍蝦頭朝下垂直方向落入定向槽,并接觸捕捉網(wǎng)后,小龍蝦的受力分析如圖6所示,小龍蝦受到捕捉網(wǎng)垂直方向上的支持力F2,平行方向上的摩檫力F1,如果捕捉網(wǎng)可以提供的最大靜摩擦力F1Max大于重力在捕捉網(wǎng)平行方向上的下滑力,那么小龍蝦蝦螯或尖銳額劍被捕捉網(wǎng)勾住,即滿足式(1):

圖6 小龍蝦頭朝下進(jìn)入定向槽的受力分析Figure 6 Force analysis of crayfish entering orientationgroove head down
F1Max>Gcosα。
(1)
經(jīng)分析發(fā)現(xiàn),F(xiàn)1Max與捕捉網(wǎng)材質(zhì)、網(wǎng)孔大小等因素有關(guān),重力在捕捉網(wǎng)平行方向上的下滑力與小龍蝦重量以及捕捉網(wǎng)角度α有關(guān)。試驗(yàn)選用表面粗糙的尼龍網(wǎng)為捕捉網(wǎng)材質(zhì),選取不同網(wǎng)孔大小的尼龍網(wǎng)以及不同捕捉網(wǎng)角度進(jìn)行驗(yàn)證實(shí)驗(yàn)。
若小龍蝦蝦螯或尖銳額劍被捕捉網(wǎng)勾住,在重力作用下小龍蝦倒向定向槽側(cè)板,產(chǎn)生水平方向的支持力F4,小龍蝦達(dá)到穩(wěn)定狀態(tài),如圖7所示。而小龍蝦觸碰到定向槽側(cè)板需要滿足一定的條件,主要與定向槽寬度有關(guān),寬度過大的定向槽,小龍蝦碰不到側(cè)板,發(fā)生翻轉(zhuǎn)滑落。在理想條件下,小龍蝦可能有任意的掉落位置和傾斜方向,在極限條件下,若小龍蝦額劍尖端到尾部的距離L6大于定向槽對角線長度,則任何條件下都不會(huì)發(fā)生翻轉(zhuǎn)滑落;同時(shí)彈簧應(yīng)該提供足夠的支持力,使捕捉網(wǎng)能夠支撐住小龍蝦的重量,以上條件即滿足式(2)和式(3)。
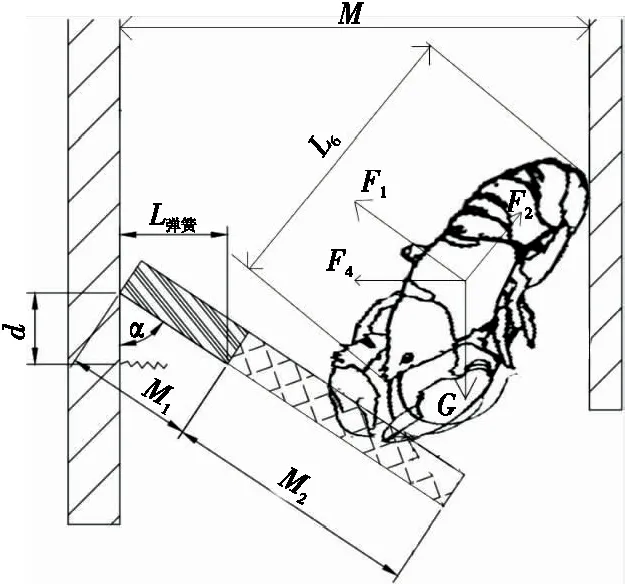
圖7 小龍蝦頭朝下傾斜狀態(tài)的受力分析Figure 7 Force analysis of tilted crayfish enteringorientation groove head down
(2)
F2=K×(線徑-L彈簧)cosα>Gsinα。
(3)
但是考慮到小龍蝦自身、彈簧以及捕捉網(wǎng)的形變問題,以及后期定向槽翻轉(zhuǎn)后需要小龍蝦的垂直狀態(tài)等因素,選取定向槽寬度作為操作參數(shù)進(jìn)行驗(yàn)證實(shí)驗(yàn),以期找到較為合適的定向槽寬度參數(shù)。如果小龍蝦蝦螯或尖銳額劍未被捕捉網(wǎng)勾住,重力在捕捉網(wǎng)平行方向上的下滑力的作用下滑出定向槽,則小龍蝦頭尾定向失敗。
2.2 小龍蝦尾朝下進(jìn)入定向槽
當(dāng)小龍蝦尾朝下垂直方向落入定向槽,并接觸捕捉網(wǎng)后,小龍蝦的受力分析如圖8所示,小龍蝦受到捕捉網(wǎng)垂直方向上的支持力F2,平行方向上的摩檫力F1,如果捕捉網(wǎng)可以提供的最大靜摩擦力F1Max小于重力在捕捉網(wǎng)平行方向上的下滑力,且捕捉網(wǎng)與定向槽側(cè)板形成的開口足夠大時(shí),小龍蝦順利滑出定向槽。即滿足式(4):

圖8 小龍蝦尾朝下進(jìn)入定向槽的受力分析Figure 8 Force analysis of crayfish entering orientationgroove tail down
(4)
若捕捉網(wǎng)可以提供的最大靜摩擦力F1Max大于重力在捕捉網(wǎng)平行方向上的下滑力,小龍蝦沒有下滑,在重力的作用下倒向定向槽側(cè)板,產(chǎn)生水平方向的支持力F4,如圖9所示。

圖9 小龍蝦尾朝下傾斜狀態(tài)的受力分析Figure 9 Force analysis of tilted crayfish enteringorientation groove tail down
當(dāng)小龍蝦未能順利通過定向槽時(shí),可以借助撥桿波動(dòng)捕捉網(wǎng),改變角度α大小,使重力在捕捉網(wǎng)平行方向上的下滑力增大,最終大于最大靜摩擦力F1Max,使小龍蝦順利滑落,即滿足式(5):
(5)
3 小龍蝦頭尾定向試驗(yàn)
3.1 試驗(yàn)儀器與設(shè)備
小龍蝦頭尾定向簡易試驗(yàn)裝置:該裝置為數(shù)個(gè)不同捕捉網(wǎng)角度、定向槽寬度以及網(wǎng)孔大小等參數(shù)的頭尾定向機(jī)構(gòu),未設(shè)置撥片機(jī)構(gòu),自制;其他主要儀器設(shè)備包括游標(biāo)卡尺 (精度 0.1 mm)、鋼尺(量程 500 mm)、電子天平(精度 0.01 g)等。
3.2 試驗(yàn)材料
小龍蝦市售,產(chǎn)地鹽城,挑選個(gè)體鮮活、蝦螯完整的小龍蝦,運(yùn)至實(shí)驗(yàn)室后人工挑選大小規(guī)格相同的小龍蝦,為了避免活體小龍蝦運(yùn)動(dòng)對頭尾定向過程的影響,將小龍蝦加熱熟制處理后待用。
3.3 小龍蝦形態(tài)參數(shù)測定
通過對小龍蝦頭尾定向機(jī)理的分析,頭尾定向槽、蝦螯捕捉網(wǎng)等結(jié)構(gòu)參數(shù)對頭尾定向具有重要影響,其設(shè)計(jì)優(yōu)化應(yīng)具體參考小龍蝦的各項(xiàng)形態(tài)參數(shù),故對試驗(yàn)所選用的小龍蝦進(jìn)行質(zhì)量和外觀尺寸測量(見圖10)[18-19]。實(shí)際測量時(shí),如頭部重量、胸部重量等參數(shù)受切割位置、角度等差異的影響,長度數(shù)據(jù)受到彎曲程度的影響,僅作為相對數(shù)據(jù)參考,不作為絕對數(shù)據(jù),測量結(jié)果見表2和表3。

表2 小龍蝦外形尺寸測量結(jié)果Table 2 Measurement results of crayfish body size cm

表3 小龍蝦重量參數(shù)測量結(jié)果Table 3 Measurement results of crayfish body weight g

圖10 小龍蝦外觀尺寸測量示意圖Figure 10 Measurement schematic diagram of crayfishbody size
3.4 單因素試驗(yàn)
采用捕獲率(頭朝下)和通過率(尾朝下)作為小龍蝦頭尾定向效果的評價(jià)指標(biāo)。小龍蝦頭朝下進(jìn)入定向槽被捕捉網(wǎng)捕獲視為捕獲成功,小龍蝦尾朝下進(jìn)入定向槽未被捕捉網(wǎng)捕獲,能夠順利通過視為通過成功,每次選用50只小龍蝦樣本進(jìn)行試驗(yàn),結(jié)果取平均值,并按式(6)、式(7) 分別計(jì)算捕獲率和通過率。
(6)
(7)
式中:
R1——捕獲率,%;
R2——通過率,%;
d1——每次試驗(yàn)成功捕獲的小龍蝦個(gè)數(shù);
d2——每次試驗(yàn)成功通過的小龍蝦個(gè)數(shù);
n——每次試驗(yàn)小龍蝦樣本數(shù)。
3.4.1 捕捉網(wǎng)角度 由圖11可知,隨著捕捉網(wǎng)角度的增加,小龍蝦捕捉成功率逐漸上升,當(dāng)捕捉網(wǎng)角度為60°時(shí)捕捉成功率最高為98%。實(shí)際試驗(yàn)時(shí)僅有一只小龍蝦未能成功捕捉,可能與該只小龍蝦在同一批次中體型偏小,蝦螯短小且質(zhì)地較軟有關(guān),在工業(yè)化加工時(shí)應(yīng)嚴(yán)格分級,剔除殘疾、死蝦等不良龍蝦個(gè)體,保證定位成功率。捕捉網(wǎng)角度越大,捕捉成功率越高,但尾朝下通過率會(huì)下降,后期可通過撥片波動(dòng)捕捉網(wǎng),使尾朝下小龍蝦順利落下,但應(yīng)盡量降低撥片力度以降低其對捕捉率和蝦螯完整度的影響,且捕捉網(wǎng)角度為55°時(shí),已經(jīng)達(dá)到了很高的捕捉率,故較優(yōu)的捕捉網(wǎng)角度為55°~60°。
3.4.2 捕捉網(wǎng)網(wǎng)孔大小 由圖12可知,隨著捕捉網(wǎng)網(wǎng)孔尺寸的增加,小龍蝦捕捉成功率逐漸上升,當(dāng)捕捉網(wǎng)網(wǎng)孔尺寸為10~12 cm時(shí),捕捉成功率達(dá)最高,可能是因?yàn)榫W(wǎng)孔越大,蝦螯越容易深入捕捉網(wǎng),小龍蝦額劍也更容易被捕捉網(wǎng)掛住。試驗(yàn)的捕捉網(wǎng)網(wǎng)孔最大孔徑為12 mm,遠(yuǎn)小于蝦尾寬度,蝦尾不容易被捕捉網(wǎng)掛住。故較優(yōu)的捕捉網(wǎng)網(wǎng)孔大小為10~12 mm。
3.4.3 定向槽寬度 由圖13可知,隨著定向槽寬度的增加,小龍蝦捕捉成功率逐漸下降。當(dāng)定向槽寬度為5 cm時(shí),捕捉成功率最高為100%;當(dāng)定向槽寬度超過6 cm后,捕捉成功率下降較快,是因?yàn)槎ㄏ虿蹖挾冗^大,頭朝下進(jìn)入定向槽的小龍蝦有一定概率不能維持頭下尾上的豎直狀態(tài),水平滑出不能順利捕捉。而隨著定向槽寬度的增加,小龍蝦尾朝下通過率逐漸上升,是因?yàn)槎ㄏ虿蹖挾冗^大時(shí),尾朝下進(jìn)入定向槽的小龍蝦有一定概率不能維持頭下尾上的豎直狀態(tài),水平滑出順利通過。故較優(yōu)的定向槽寬度為4~5 cm。
3.5 正交試驗(yàn)
在單因素試驗(yàn)的基礎(chǔ)上,選取捕捉網(wǎng)角度、定向槽寬度、捕捉網(wǎng)網(wǎng)孔大小為試驗(yàn)因素,以頭朝下捕捉率與尾朝下通過率為試驗(yàn)指標(biāo),采用正交表L9(34)進(jìn)行正交試驗(yàn)。試驗(yàn)因素水平編碼見表4,試驗(yàn)設(shè)計(jì)與結(jié)果見表5。

表4 正交試驗(yàn)因素水平表Table 4 Factors and levels of orthogonal test

表5 正交試驗(yàn)設(shè)計(jì)及結(jié)果Table 5 Orthogonal experimental design and results
由極差分析可知,影響頭朝下捕捉成功率的主次因素為定向槽寬度>捕捉網(wǎng)角度>捕捉網(wǎng)網(wǎng)孔大小,最優(yōu)組合為捕捉網(wǎng)角度55°、定向槽寬度4 cm、捕捉網(wǎng)網(wǎng)孔大小12 mm,此時(shí)頭朝下捕捉成功率達(dá)98%。雖然此條件下尾朝下通過率相對較低,但后期的撥片設(shè)計(jì)(圖2所示)可以保障通過率。綜上,最優(yōu)參數(shù)為捕捉網(wǎng)角度55°、定向槽寬度4 cm、捕捉網(wǎng)網(wǎng)孔大小12 mm。在此參數(shù)下,采購?fù)灰?guī)格小龍蝦,并依據(jù)規(guī)格尺寸以及蝦螯完整度進(jìn)行嚴(yán)苛篩選30只進(jìn)行驗(yàn)證實(shí)驗(yàn), 小龍蝦頭朝下捕捉率達(dá)100%,說明試驗(yàn)提出的頭尾定向方法是可行的。
3.6 頭尾定向整體裝置的可行性分析
將單個(gè)定向機(jī)構(gòu)與圖1所示的小龍蝦頭尾定向裝置整體效果簡圖對比發(fā)現(xiàn),模擬單個(gè)定向機(jī)構(gòu)的簡易試驗(yàn)裝置未能覆蓋的因素有:① 定向槽高度。定向槽越高,小龍蝦接觸捕捉網(wǎng)時(shí)的速度越高。較高處的小龍蝦的下落速度可以提高小龍蝦尾朝下通過率,同時(shí)對小龍蝦的蝦螯完整度有一定影響。整體定向裝置的定向槽是多層機(jī)構(gòu),定向槽高度 的設(shè)置需要考慮整體裝置的設(shè)計(jì),同時(shí)避免速度過快,影響蝦螯完整度。② 撥片與蝦螯捕捉網(wǎng)的碰觸。理論設(shè)計(jì)時(shí),為了防止尾朝下狀態(tài)小龍蝦不能順利通過定位槽,設(shè)計(jì)了撥桿和撥片,撥片輕微撥動(dòng)蝦螯捕捉網(wǎng),使小龍蝦落下,撥桿和撥片設(shè)計(jì)還需進(jìn)一步優(yōu)化。

頭尾定向槽尺寸6 cm,捕捉網(wǎng)網(wǎng)孔大小8 mm

捕捉網(wǎng)角度55°,頭尾定向槽寬度6 cm圖12 網(wǎng)孔大小對小龍蝦頭尾定向的影響

捕捉網(wǎng)角度55°,捕捉網(wǎng)網(wǎng)孔尺寸8 mm圖13 定向槽寬度對小龍蝦頭尾定向的影響
4 結(jié)論
利用小龍蝦頭尾形態(tài)差異,設(shè)計(jì)了一種小龍蝦頭尾定向裝置,由滾軸輸送分級機(jī)構(gòu)、頭尾定向機(jī)構(gòu)及相關(guān)輔助機(jī)構(gòu)組成,小龍蝦沿垂直方向的長環(huán)狀頭尾定向輸送帶輸送,在捕捉網(wǎng)、撥片波動(dòng)以及重力等因素共同作用下完成頭尾定向動(dòng)作。結(jié)果表明,小龍蝦頭尾定向裝置的設(shè)計(jì)是可行的,試驗(yàn)條件下的最優(yōu)參數(shù)為捕捉網(wǎng)角度55°、定向槽寬度4 cm、捕捉網(wǎng)網(wǎng)孔大小12 mm,此時(shí)小龍蝦頭朝下捕獲率接近100%,尾朝下通過率達(dá)88%,考慮到后期撥片作用,可以認(rèn)為尾朝下能夠順利通過。后續(xù)可對整體裝置的各項(xiàng)參數(shù)進(jìn)行進(jìn)一步驗(yàn)證。
