激光對微型無人機跟瞄充電系統的設計與實現
2022-03-10 02:19:16董大興楊雁南
激光技術 2022年2期
張 港,董大興,楊雁南
(南京航空航天大學 理學院 應用物理系,南京 210016)
引 言
微型無人機(micro-unmanned aerial vehicle,MUAV)具有靈活、高效、隱蔽及高安全性等特點,在軍用[1-3]和民用[4-6]領域發揮著越來越重要的作用。而現階段MUAV的廣泛應用對其動力方面的要求顯著提升,提高MUAV的續航時間已經成為研究人員廣泛關注的重要問題。基于激光能量集中、方向性好以及特制激光電池允許照射光強大、光電轉換效率高的特點,以激光束作為無線能量傳輸載體對MUAV進行實時充電,是提高MUAV續航時間的一條有效途徑[7-13]。但這種實時充電方式需對飛行過程中的MUAV進行精準、快速的跟蹤,才能保證激光束始終對準激光電池片,以實現MUAV的高效充電[14]。
從國內外學者已經開展的激光對移動目標跟蹤瞄準的相關研究報道看,激光對移動目標跟瞄方式主要分為兩類:(1)采用四象限光電探測器、光電二極管等光電傳感器對激光信號進行探測,該類方式可以將光電傳感器直接放置在移動目標上,其感知的目標位置信息通過無線傳輸方法傳送到激光發射端,用以控制激光束的發射方位[15],也可以將光電傳感器放置在激光發射端,而在移動目標上放置角錐反射鏡,利用角錐鏡等光學器件反射回光電傳感器上的激光信號來控制激光束的發射方位[16-17];(2)采用電荷耦合器件(charge-coupled device,CCD)、互補金屬氧化物半導體(complementary metal oxide semiconductor,CMOS)等圖像傳感器對移動目標或激光光斑位置進行檢測,從而實現激光對MUAV的實時充電[18-19]。這兩類跟蹤瞄準方式各有特點:第1類方式由于光電傳感器硬件響應時間的限制,跟蹤速度受到制約,但跟蹤精度較高,該方式比較適用于線度小、移動速度低的目標跟蹤瞄準;第2類方式由于圖像處理速度快,因此跟蹤速度較高,但由于圖像清晰度的影響,跟蹤精度會受到限制,該方式比較適用于線度大、移動速度高的目標跟蹤瞄準。
為了提高旋翼式MUAV的續航時間和工作性能,本文中設計并搭建了一套基于振鏡的激光遠程充電系統。該系統采用掃描振鏡、硅光電池陣列和無線數傳模塊構建閉環反饋控制系統,通過合理布置硅光電池陣列,使之同時兼顧激光束對空中移動MUAV的掃描跟蹤和充電功能,且接收端結構較為簡單、輕巧,可有效提高MUAV的續航時間。
1 激光跟瞄充電系統的整體設計
要實現激光對飛行中MUAV的實時充電,首先要實現激光束對MUAV的掃描與捕獲,之后需要激光束對MUAV實時地跟蹤與瞄準。因此,在置于地面上的激光發射端與加載到MUAV上的激光接收端間建立了一套閉環反饋控制系統。該系統的結構框圖如圖1所示。
激光發射端由光纖輸出的高功率半導體激光器、光束整形光學器件和二軸掃描振鏡組成,光束整形光學器件對光纖輸出的激光束進行勻化和調焦,以實現激光束發散角大小可調;激光束先后照射到可繞兩垂直x-y軸轉動的全反射振鏡上,通過控制振鏡轉動,可使激光束在一定的區域內移動,實現激光對移動目標的瞄準。激光接收端由硅光電池陣列與MUAV上的鋰電池組成,硅光電池陣列將照射到其上激光能量轉換成電能,通過升壓整流電路為MUAV上的鋰電池進行充電。
同時,硅光電池陣列在激光照射前后負載電壓信號發生變化,由單片機芯片處理后進行模/數信號采樣識別,采用跟蹤算法對信號進行處理,獲取激光斑與硅光電池陣列的相對位置信息,將此位置信息進行編碼處理后,由無線數傳模塊傳輸到地面控制系統。在地面控制端,控制器將反饋的信息進行解碼,再通過相應控制算法進行處理,輸出對二軸振鏡的數字電壓控制信號,并通過數字模擬轉換器(digital-to-analog converter,DAC)模塊轉換為模擬電壓控制信號,用來調整二軸振鏡姿態,使激光束偏轉相應角度,實現激光對MUAV的實時跟蹤瞄準。若MUAV端無電壓信號反饋,則表示激光束未照射到硅光電池陣列,此時控制系統則會控制振鏡在充電區域內按照掃描算法快速掃描,直至激光束捕獲到硅光電池陣列;若有激光照射的位置信息反饋,閉環控制系統便進入正常的跟蹤瞄準工作模式。位于地面上的激光掃描振鏡及其控制系統如圖2所示。
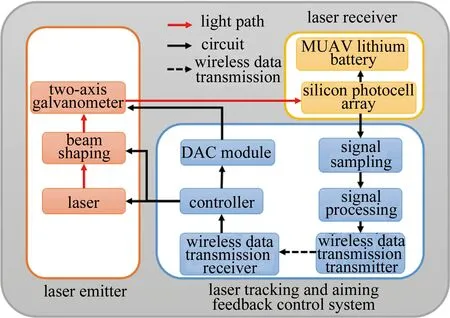
Fig.1 Structrue block diagram of laser aiming charging system for MUAV
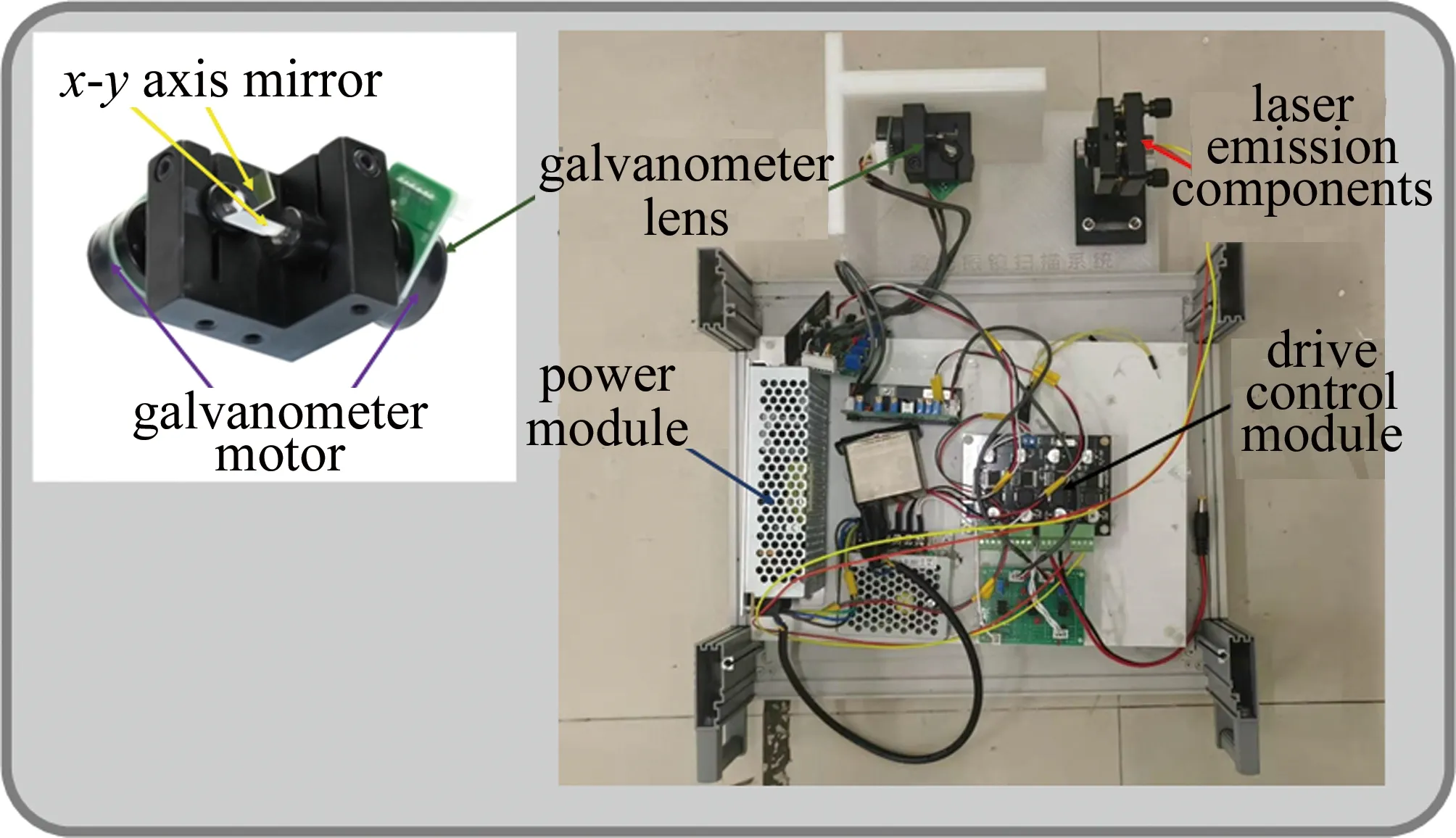
Fig.2 Prototype of laser scanning galvanometer and its control system
在本系統中,調節振鏡轉角的輸入信號為MUAV上硅光電池陣列與激光束的相對位置經掃描跟蹤算法處理后所得控制信號。振鏡上兩反射鏡片尺寸為7mm×11mm×0.6mm,鏡片光學反射率大于98%。控制器提供的電壓信號通過驅動放大電路和DAC模塊,驅動電機和與電機固連的鏡片轉動,進而控制激光束發射方向。振鏡的掃描速率為20×103packet/s,模擬電壓信號在-10V~+10V變化,對應每個反射鏡片-20°~+20°的角度變化,且角度變化與電壓信號變化成線性關系。振鏡電機的小角度步進響應時間為0.15ms,可識別0.001V的電壓波動,因此具有很高的跟蹤靈敏度和跟蹤精度。
MUAV端硅光電池陣列設計如圖3所示。由9個硅光電池以3×3矩陣排列,當有激光照射到硅光電池光敏面上時,硅光電池的負載兩端產生負載電壓,且在負載電阻不變時,照射的激光強度越大,光電流越大,負載電壓也越大。通過單片機芯片分別讀取各子電池的負載電壓信號,采用跟蹤算法處理即可得到激光斑在硅光電池陣列上的相對位置信息,再對該信息進行傳輸和處理,就可實現激光束對硅光電池陣列的跟蹤。在整個激光充電模塊中,硅光電池陣列有兩個作用:一是作為光電信息位置傳感器,得到激光斑與光電池陣列的相對位置信息;二是作為電能獲取裝置,將激光能量轉換為電能,為MUAV上的鋰電池實時充電。即同時實現激光定位跟蹤與實時充電兩種功能。
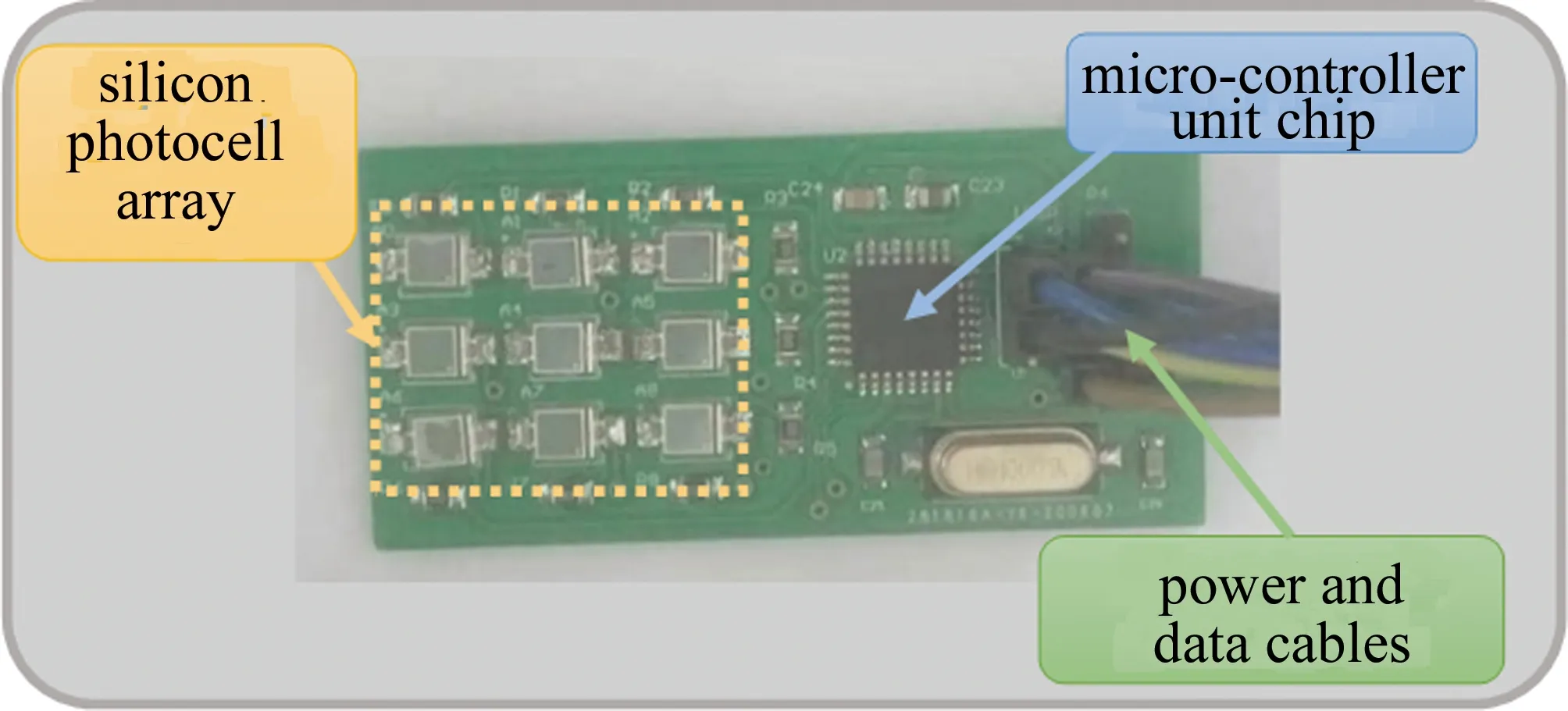
Fig.3 Prototype of laser charging module at MUAV
為了實現激光對運動MUAV的跟瞄,作者采用Nordic公司的NRF52840芯片作為信號傳輸與反饋的無線數傳模塊,該模塊具有功耗低、體積小、傳輸距離遠、抗干擾能力強等優點,其樣機如圖4所示。NRF52840通過SPI接口與單片機芯片連接,進行協議設置和數據傳輸,同時通過串行外設接口(serial peripheral interface,SPI)接口接收單片機芯片的控制指令,進行無線數據的接收和發送。RF52840的工作電壓為1.7V~5.5V,工作頻率為2402MHz~2480MHz,發射功率為-20dBm~+8dBm,同時內部自帶32.768kHz晶振,功耗很低,工作時電流消耗僅為1.34μA,最大傳輸距離可到達550m,可適應-40℃~85℃的惡劣工作環境。
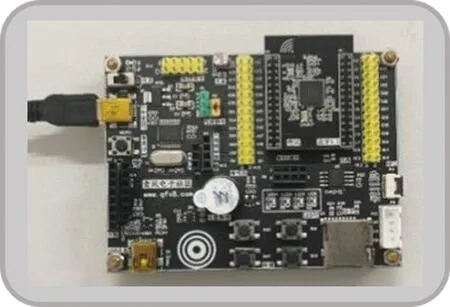
Fig.4 Wireless data transmission module based on NRF52840
2 激光跟瞄充電系統的算法設計與實現
采用上述系統裝置完成激光對空中移動MUAV的實時充電,需分兩步實現。第1步是激光束對MUAV的掃描與捕獲;第2步則是激光束對MUAV的跟蹤瞄準。
2.1 掃描捕獲
首先,在選定單片機芯片作為控制掃描振鏡的主處理器后,為使系統整體工作模式簡潔高效,采用2維圖形掃描作為主要掃描方式。
位于地面控制端的DAC模塊可通過SPI接口讀取16位二進制數字電壓信號,為此,首先將MUAV飛行空域的2維平面離散為65535×65535個像素點,其次將掃描算法所用的2維掃描圖形進行離散化處理,計算得出圖形中各離散點的2維坐標,再將其轉化為數組存入到單片機的數據存儲器中。在單片機運行掃描算法時,就可直接按照掃描順序調用數組中的坐標值,通過算法處理后,直接由單片機芯片的輸入/輸出(in/out,I/O)端口輸出相應的數字電壓信號,DAC模塊再將其轉換為模擬電壓信號,驅動振鏡轉動相應角度,從而控制激光束發射方向,完成激光束對MUAV工作空域的掃描工作。圖5為系統掃描程序原理框圖。本文中選用螺線掃描方式對MUAV飛行空域進行掃描,示意圖如圖6所示。
掃描起始坐標為(32767,32767),掃描參數方程為:
式中,v為掃描線速度,ω為掃描角速度,a為常數,t為時間。在中心點附近區域掃描角速度較大,這樣可降低掃描密度,有效提高掃描速度;而在掃描區域邊緣附近時掃描角速度較小,但分辨率和精度較高。該掃描方式有利于提高系統的掃描效率,可使激光束在較短的時間內捕獲到硅光電池陣列。

Fig.5 Schematic diagram of system scanning program
2.2 跟蹤瞄準
在激光束對硅光電池陣列的跟瞄過程中,采用和差算法通過對陣列中各硅光電池輸出的電信號進行處理實現跟瞄。系統照射到硅光電池陣列上的激光束近似為圓形光斑,且能量分布均勻。首先對陣列內的子電池進行編號,如圖7所示,然后以位于中心的5號子電池為坐標原點,建立2維坐標系,在坐標系中對其余子電池進行坐標定位。
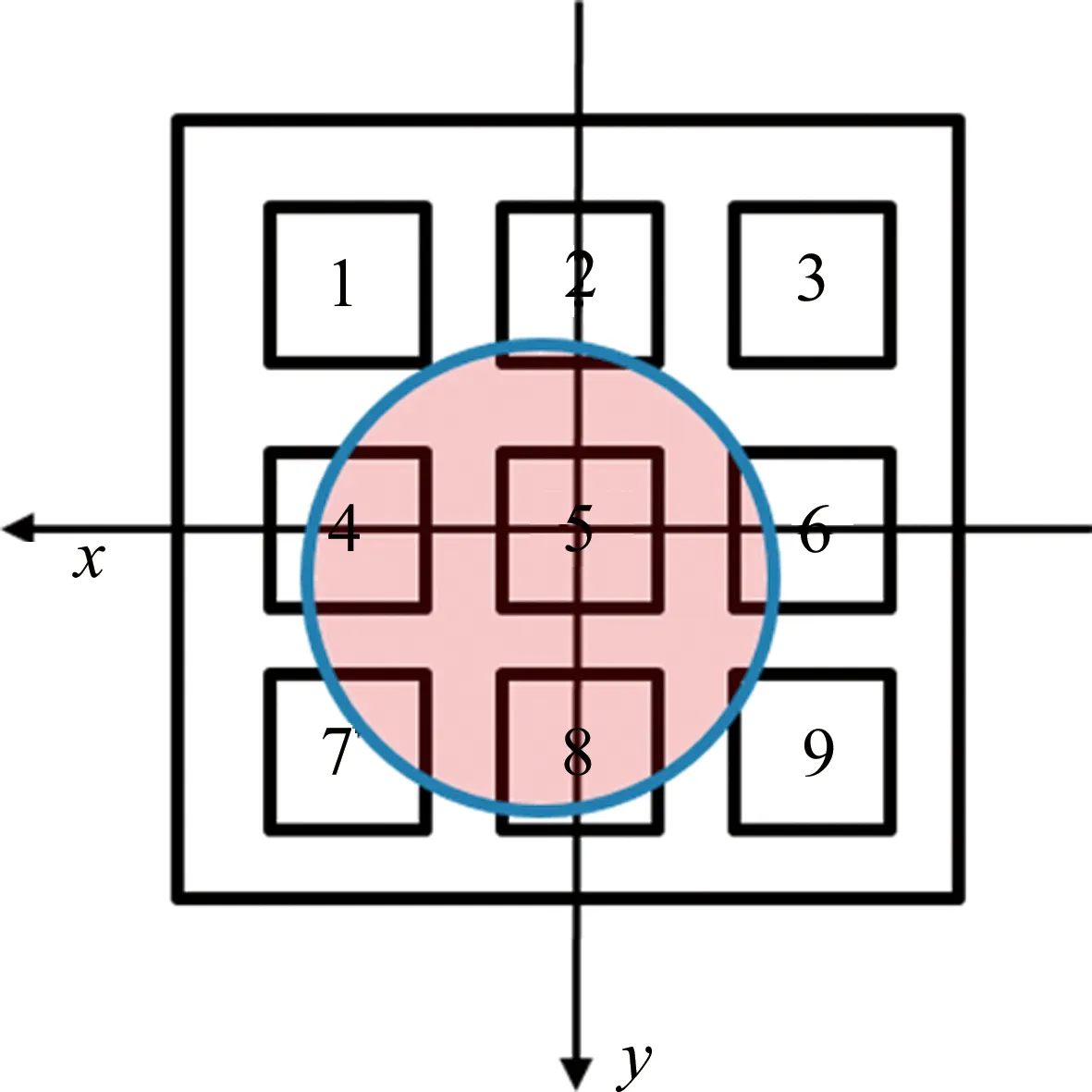
Fig.7 Schematic diagram of silicon photocell
和差算法根據激光斑發生位置偏移后各子電池負載電壓信號的不同進行定位,在MUAV飛行過程中,激光斑中心相對硅光電池陣列中心有偏離時,各子電池會由于光斑信號的變化產生不同光電流I1,I2,…,I9,進而產生不同電壓信號U1,U2,…,U9,且每個電壓信號的大小與照射到各子電池光敏面上的激光斑面積大小成正比。采用和差算法對該系列電壓信號進行處理,即可得到光斑與光電池陣列的相對位置信息。通過定量計算可得,激光斑中心在硅光電池陣列坐標系中的位置為:
式中,λ為常數,由此和差算法對激光束的位置信息判斷簡單迅速。需要說明的是,在單片機芯片對硅光電池陣列上輸出電壓的兩次采樣之間,若光斑偏移距離較大,則該算法得出的激光斑位置信息誤差較大,因此該算法對單片機芯片的采樣頻率要求較高。
同時,還采用卡爾曼濾波算法對激光斑中心下一時刻的位置進行預測與修正,以減小跟蹤延遲,提高跟蹤速度及精度。設常態情況下MUAV勻速運動,但由于空氣中氣流干擾或飛行控制系統誤差,也會出現非勻速飛行的狀態。卡爾曼濾波算法可將激光光斑中心在硅光電池陣列上的相對位置作為觀測數據,對其進行濾波處理,將干擾項隨機加速度u2×1(k-1)(k表示采樣次數)作為輸入向量,硅光電池輸出電壓信號的誤差作為觀測噪聲v2×1(k),下標2×1表示2行1列的矩陣。將x、y軸方向的坐標和速率作為狀態向量:

式中,T為信號采集周期,k為采樣次數,Z(k)為第k次采樣對應的相對位置觀測量。將(5)式和(6)式代入到卡爾曼濾波的預測和校正方程后,即可實現對下一時刻激光斑中心位置的預測,減小跟瞄的時間延遲。卡爾曼濾波算法是一個遞歸的過程,只需知道初始時刻MUAV坐標測量值和速度計算值,即可得到下一時刻的最優估計,該算法不需要保存其它原始數據,占用內存極小且速度很快,非常適用于本系統中連續實時跟瞄的工作模式。
3 激光跟瞄充電系統的實驗測試結果
在室外實驗中,選用四旋翼MUAV做為實驗樣機,將硅光電池陣列、單片機芯片電路板及一個NRF52840無線數傳模塊作為激光跟瞄充電系統的接收端,固定至MUAV底部,光電轉換器件采用BPW34S型號的貼片硅光伏電池,其光譜響應范圍為400nm~1100nm,響應時間為20ns,最大輸出功率可達150mW,硅光電池陣列電壓信號由單片機芯片采集后,經掃描跟蹤算法處理得到二軸振鏡控制電壓信號,由無線數傳模塊傳輸到地面端;地面端由激光器、光束整形器件、二軸振鏡、控制系統及另一無線數傳模塊組成,考慮到硅光電池對不同波長光轉換效率的差異和“大氣窗口”的存在,選用輸出波長為808nm的光纖輸出半導體激光器,在該激光器照射下,選用硅光電池的光譜靈敏度可達到其最大靈敏度的90%,激光束經非球面鏡組成的可變焦光束勻化準直整形器件后,照射到二軸振鏡,地面端的無線數傳模塊將接收到的二軸振鏡控制電壓信號傳輸到振鏡控制模塊,控制振鏡電機及其固連的反射鏡片轉動,進而控制激光束出射方向,實現激光束對硅光電池陣列的實時跟蹤。
對MUAV在不同飛行距離和飛行速度條件下進行驗證實驗測試,該系統可在空中直線距離100m的范圍內準確跟蹤MUAV,當MUAV在距水平地面80m上空、直徑50m區域內水平飛行,MUAV飛行速率低于2m/s時,本激光跟瞄充電系統能實時跟瞄到MUAV進行充電,跟蹤精度低于0.63mrad。當MUAV飛行速率超過5m/s后,跟蹤效果有所降低,激光束無法保證對硅光電池陣列的實時跟蹤。不盡人意的是,由于目前所用硅光電池的光電轉換效率較低,且激光能量較高時,受溫度影響較大,因此系統整體充電效率不高。若選用允許光照強度大、光電轉換效率高的激光電池,可使系統充電效率大幅提升[20-22]。
4 結 論
為了延長MUAV的續航時間,基于激光無線充電、振鏡掃描和反饋控制等技術的發展,設計并搭建了一套激光對MUAV實時跟瞄充電系統。通過對部分關鍵器件選取和總體性能優化,以及編寫配套的控制軟件,實現了地面激光束對空中飛行目標的快速捕獲及高精度跟瞄充電。測試結果表明:當MUAV的飛行高度為80m、飛行區域為直徑50m的圓形區域,飛行速率低于2m/s時,跟瞄精度低于0.63mrad。因此,本文中設計的跟瞄充電系統為激光對移動目標的遠程實時能量傳輸提供了一種有效的解決方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45