基于分布式光纖的隧道振動監測系統試驗研究
2022-03-16 12:33:50張浩
高速鐵路技術 2022年1期
關鍵詞:振動
張 浩
(中國鐵路設計集團有限公司, 天津 300308)
近些年,我國隧道與地下工程發展迅速,已躋身國際先進行列[1-2]。但隨著隧道運營數量及運營年限的增加,隧道突發事故不斷對隧道的運營安全提出挑戰[3-6]。為此,國內很多隧道工程設置了運營期自動化監測系統。廣州地鐵黃沙站隧道設置了全站儀+自動監測軟件的運營期隧道監測系統,解決了多目標干擾、地基振動等技術難題[7];廈門翔安海底隧道通過預埋光纖光柵傳感器,對運營期二襯變形進行自動化監測,結果表明隧道結構有較大的安全儲備[8];贛皖公路隧道采用基于分布式光纖技術的火災預警系統,用于運營期火災信號的感知與預警[9];川黔線受滑坡影響較為嚴重的明洞結構,采用基于傳統點式電信號傳感器的遠程實時監測系統,對圍巖壓力、結構內力等進行實時監測評估,系統實測分布規律與實際情況基本相符[10]。
綜上可知,目前,對于隧道結構的自動化監測多集中在公路隧道,而鐵路隧道實施運營期自動化監測的工程相對較少,且多為試驗、科研性質的,仍處于發展初期。隨著高速鐵路的飛速發展,研究一套可用于高速鐵路隧道結構內力、沉降變形、異常侵入等綜合形位感測的系統意義重大[11-12]。
本文基于京雄高速鐵路隧道光纖振動監測系統,通過對鉆機打孔、挖掘機鏟土、工程車輛行駛、隧道內落石等振動事件進行模擬,全方面評估該監測系統的采集靈敏度和精度,以期為該振動監測系統在運營期的應用提供試驗數據支撐。
1 隧道振動監測系統簡介
1.1 隧道工程概況
京雄高速鐵路機場隧道為與機場地下站首尾相連的兩段地下區間隧道。其中1號隧道全長 2 200 m,速度目標值為250 km/h,整座隧道位于北京市大興區范圍內;2號隧道全長 8 388.651 m,位于北京市大興區范圍 6 238.651 m,位于河北省廊坊市固安縣范圍 2 150 m,速度目標值為350 km/h。隧道設計為單洞雙線隧道,線間距5 m,全線采用明挖法施工,拱形明洞結構,如圖1所示。
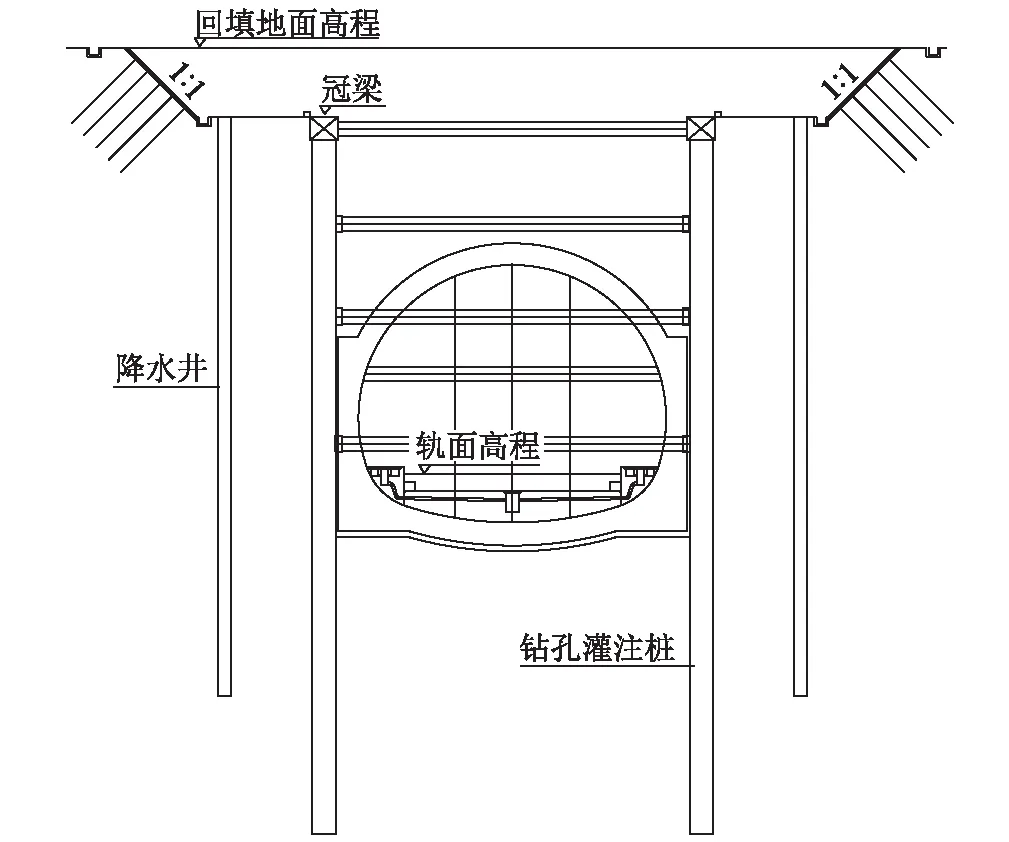
圖1 隧道主體結構、圍護結構示意圖
1.2 振動監測系統概況
隧道振動監測系統由振動感測光纜、分布式振動解調儀和相關軟件構成,在中央排水溝側槽內和拱頂外側混凝土保護層外分別沿隧道縱向通長布置1條振動感測光纜,布設長度為7 208 m。拱頂外側光纜在隧道拱頂防水板及保護層施作完成后,通過水泥砂漿固定并保護于隧頂細石混凝土保護層外側。溝槽內光纜在中央水溝澆筑完成后一次性布設,如圖2、圖3所示。
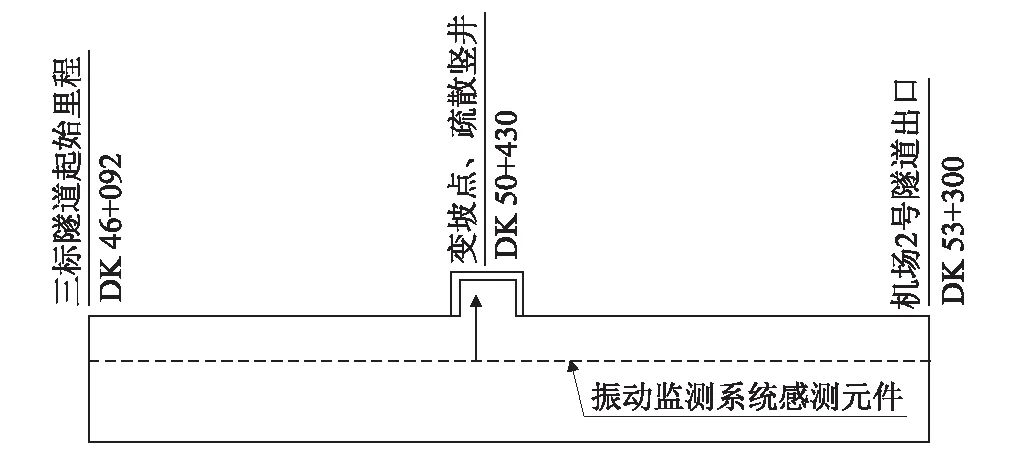
圖2 振動監測系統平面布置圖
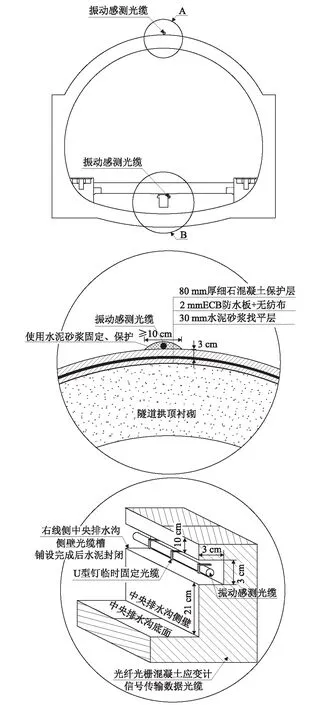
圖3 振動感測光纜安裝示意圖
振動監測光纜采用振動增敏光纖光纜,由著色光纖、防水油膏、PBT束管、鋼帶鎧裝層、加強件及護套組成,如圖4所示。光纜具有優良的機械性能和熱穩定性能,防鼠咬,防刀割,防水防潮,防紫外線,適合各種惡劣的使用環境。光纜性能參數如表1所示。
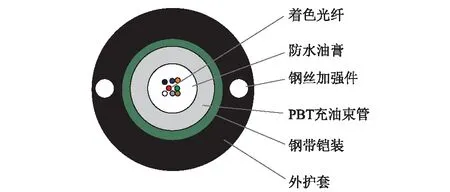
圖4 振動感測光纜示意圖
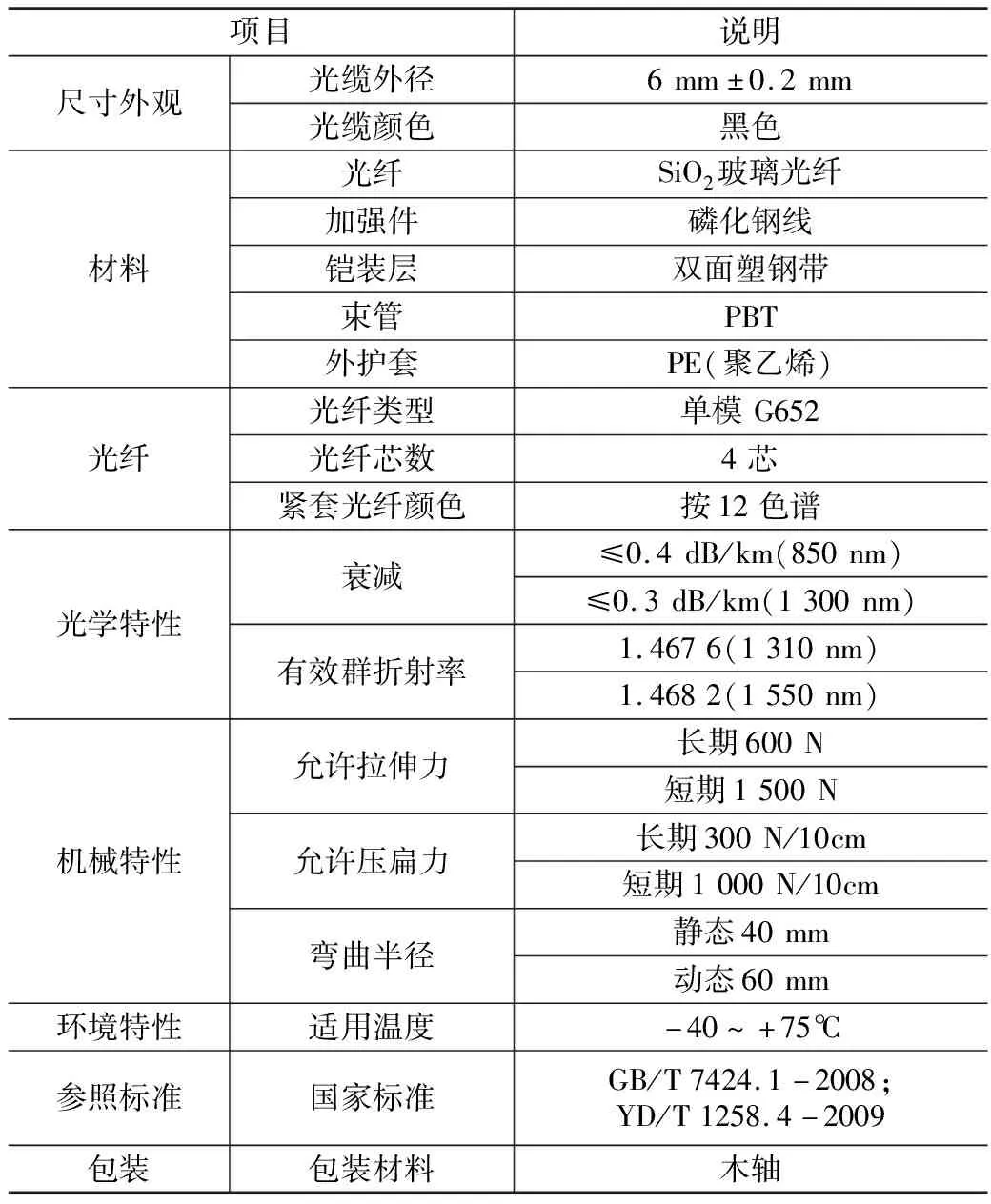
表1 振動感測光纜性能參數表
光纖分布式振動解調儀具有高靈敏度,耐水、耐高溫、耐腐蝕、抗電磁干擾能力強、高疲勞性能、性能穩定、耐久性強等優點,能夠實時收集光纜線路上每一點的振動信息,并提供精準定位,配合專業的模式識別軟件,能對振動事件進行分類預警預報。分布式振動解調儀性能參數如表2所示。
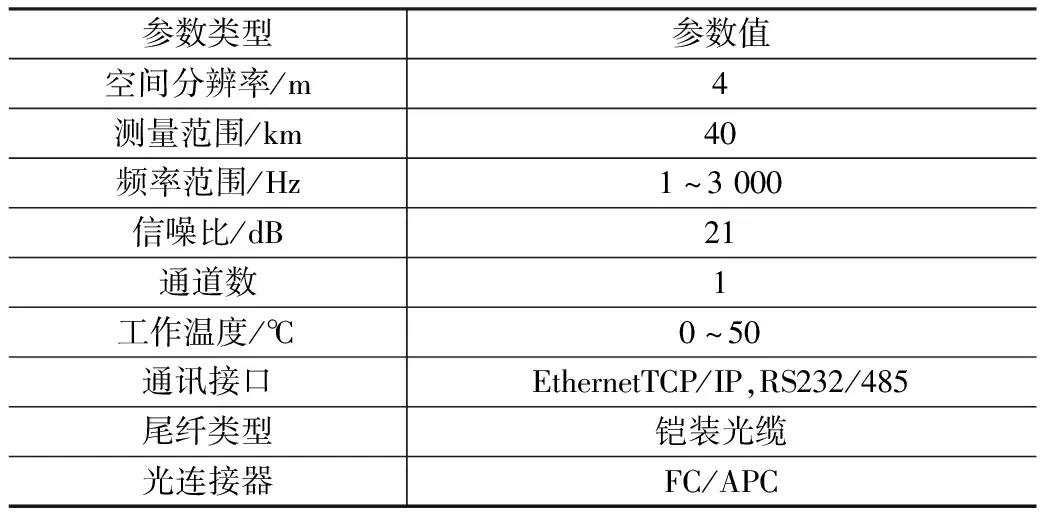
表2 分布式振動解調儀性能指標參數表
2 現場試驗
2.1 鉆機打孔試驗
根據沿光纜徑向到采集設備的距離將鉆孔分為遠、中、近3組,每組距離光纖垂向距離0 m、3 m、6 m、9 m、15 m依次重復打孔操作,每個位置重復5次,孔深約50 cm。
以距離光纜垂向距離3 m的鉆機打孔數據為例,鉆機打孔和背景噪聲的時域波形和短時傅里葉對比如圖5所示。
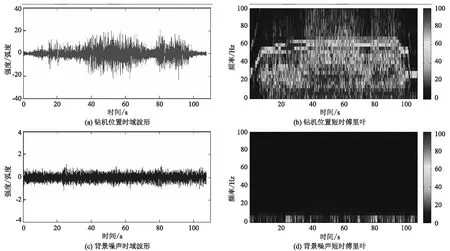
圖5 鉆機位置和背景噪聲時域波形和短時傅里葉對比圖
在時域波形圖上能明顯分辨出鉆機打孔事件。從短時譜上可以看出,背景噪聲主要集中在10 Hz以下,鉆機打孔事件的頻率范圍約在60 Hz以下。
2.2 挖掘機鏟土試驗
根據沿光纜徑向到采集設備的距離將挖掘機鏟土測點分為遠、中、近3組,每組距離光纖垂向距離0 m、3 m、6 m、9 m、15 m依次重復挖掘操作,每個位置重復5次,挖掘深度約50 cm。
以距離光纜垂向距離3 m的挖掘機鏟土數據為例,挖掘機鏟土和背景噪聲的時域波形和短時傅里葉對比如圖6所示。在時域波形圖上能明顯分辨出挖掘機鏟土事件的5次動作。從短時譜圖上可以看出,背景噪聲主要集中在10 Hz以下,挖掘機鏟土事件的頻率范圍約在40 Hz以下。
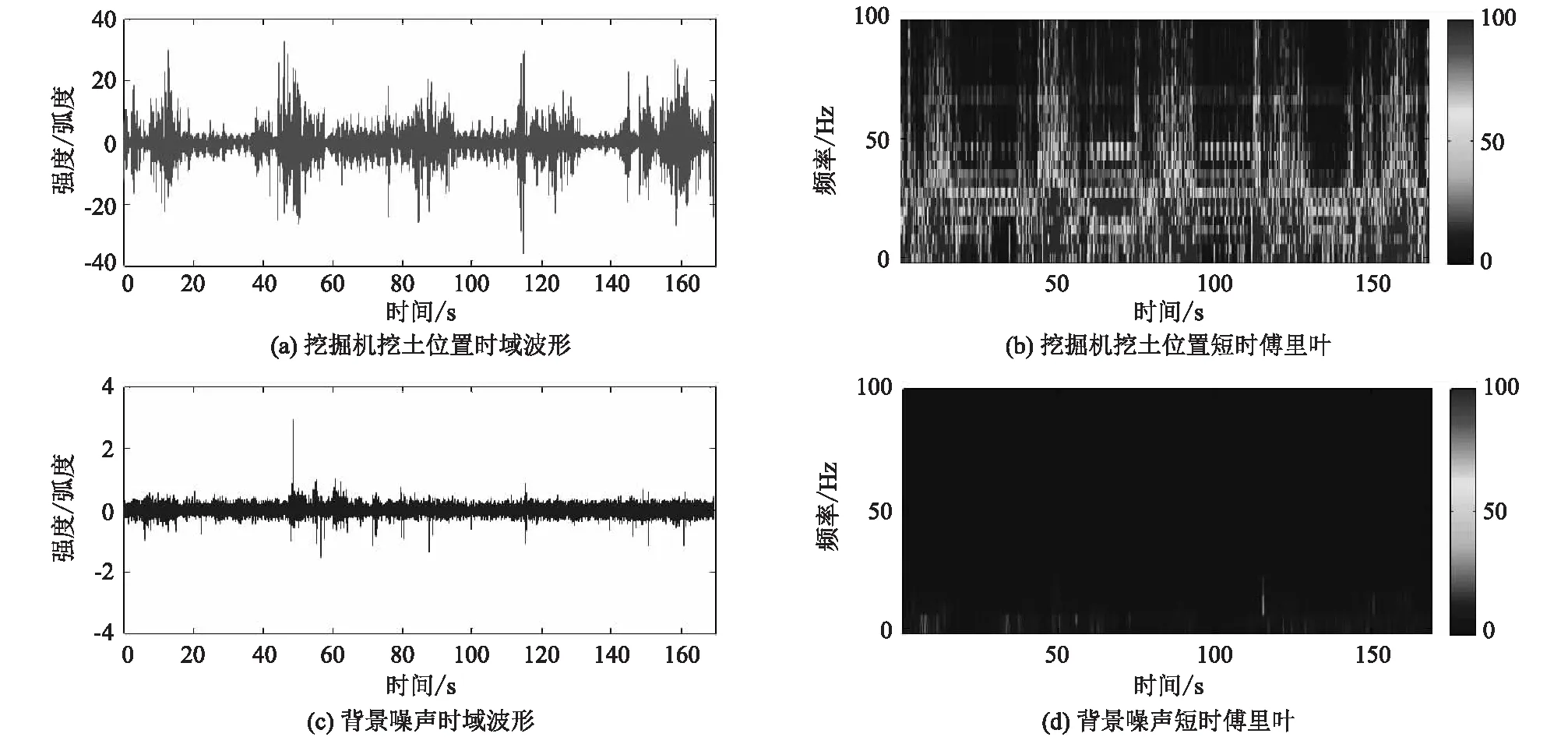
圖6 挖土位置和背景噪聲時域波形和短時傅里葉對比圖
挖掘機鏟土動作和無鏟土動作的相位數據波形幅度和頻率對比結果如圖7所示。從圖7可以看出:鏟土動作的波形幅度主要在40弧度以內,無鏟土動作的波形幅度主要在5弧度以內;短時譜圖上可見,鏟土動作的頻率主要集中在40 Hz以下,無鏟土動作的頻率主要集中在25 Hz左右。結果對比明顯,因此,可考慮將發動機的主頻率值作為特征進行后續車輛類型的識別。
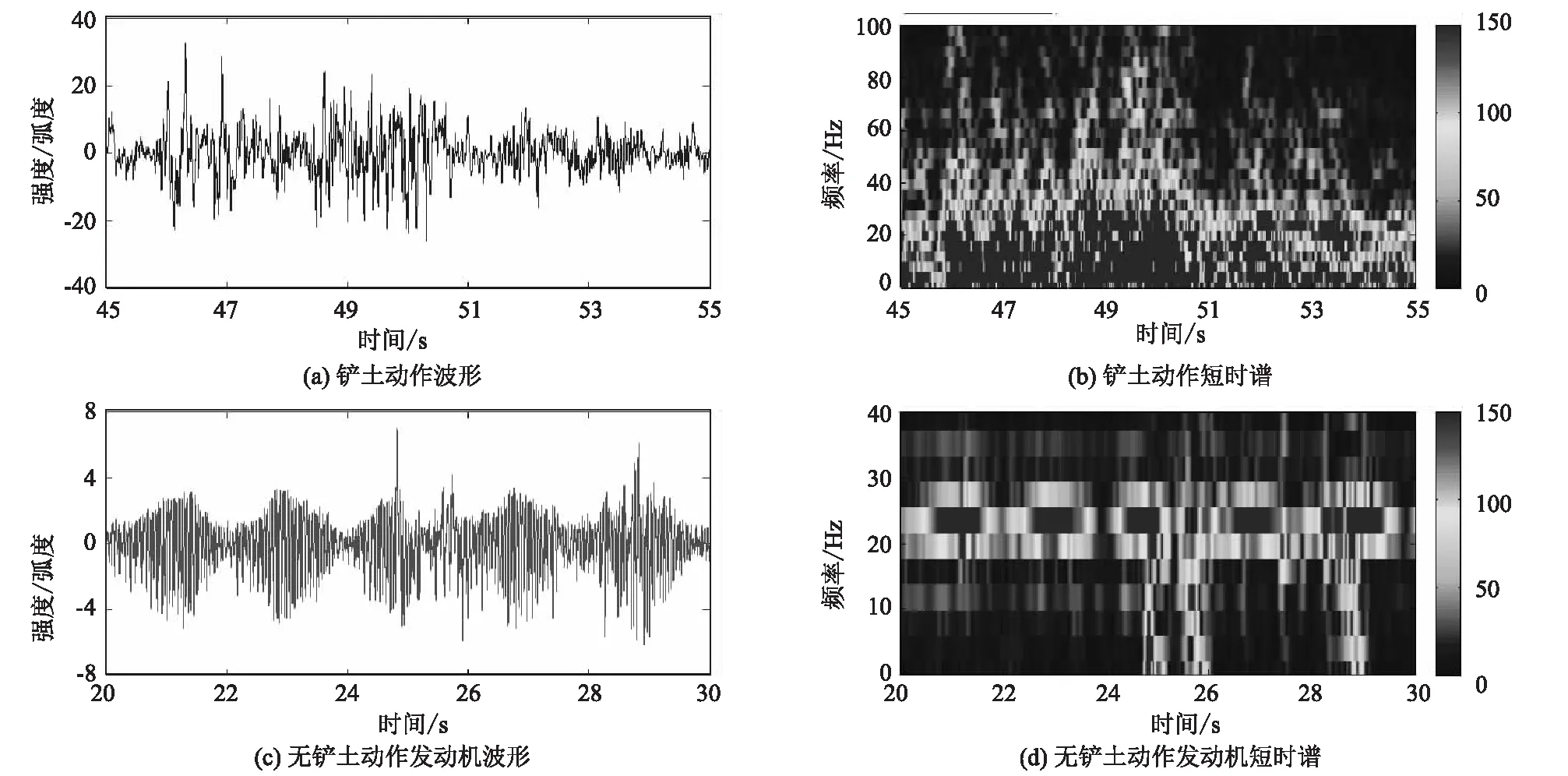
圖7 有無鏟土動作波形幅度和頻率對比(局部放大)圖
2.3 工程車輛行駛
本項試驗中,所用工程車輛均在光纜覆土厚度<2 m的區域內,分別在距離光纖垂向距離0 m、3 m、6 m、9 m、15 m處來回行駛,每個位置來回勻速行駛5次。
以距離光纜垂向距離0 m的工程車輛行駛數據為例,工程車輛行駛和背景噪聲的時域波形和短時傅里葉對比如圖8所示。在時域波形圖上能明顯分辨出工程車輛行駛事件;從短時傅里葉圖上可以看出,背景噪聲主要集中在10 Hz以下,工程車輛行駛事件的頻率范圍約在50 Hz以下。

圖8 車輛行駛和背景噪聲時域波形和短時傅里葉對比圖
2.4 隧道內落石
本次試驗所用光纜平行于排水溝鋪設在地表,光纜未使用其他方法增加與地面的耦合。試驗中所用落石重量小于0.5 kg,分別從有光纜側和無光纜側施工平臺(高度7 m)自由落體,每個位置重復試驗5次。
(1)距光纜2.5 m處(隔排水溝)
對第一次落石事件進行局部放大,落石沖擊信號的時域波形和短時譜如圖9所示。
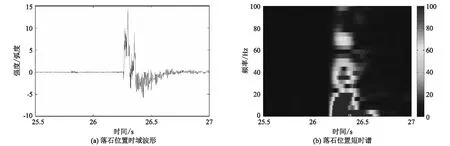
圖9 落石沖擊信號的時域波形和短時譜圖
(2)距光纜1.5 m處(未隔排水溝)
對第二次落石事件進行局部放大,落石沖擊信號的時域波形和短時譜如圖10所示。

圖10 落石沖擊信號的時域波形和短時譜圖
落石和背景噪聲的時域波形和短時傅里葉對比如圖11所示。在時域波形圖上能夠明顯分辨出落石事件(后兩次較為清晰);從短時譜圖上可以看出,背景噪聲主要集中在10 Hz以下,落石事件的頻率范圍約在40 Hz以下。
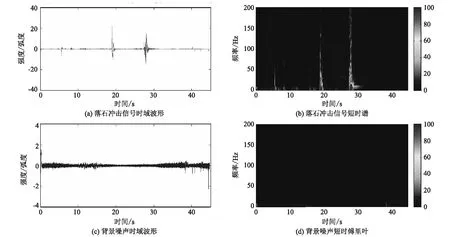
圖11 落石事件和背景噪聲時域波形和短時傅里葉對比圖
3 試驗結果分析
3.1 事件判別
以對上述試驗數據在時域和頻域上的分析作為依據,得出各工程事件的時域和頻域強度范圍如表3所示,分別將時域上的強度信息和頻域上的主頻率信息按照從弱到強劃分為0~5共6個等級,如表4所示。
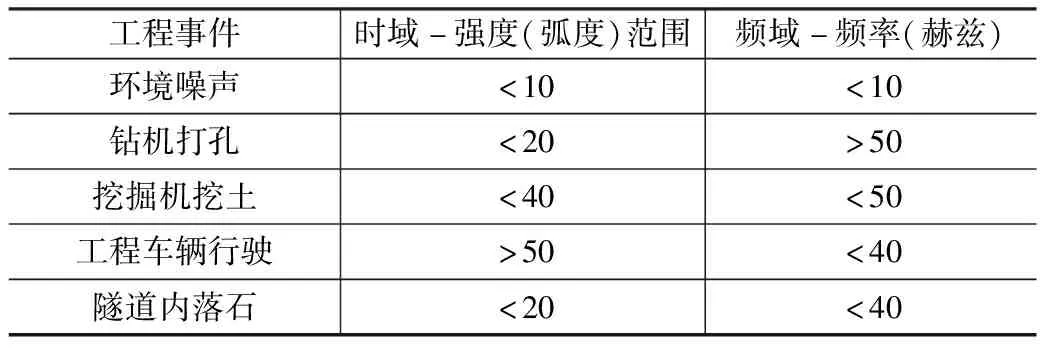
表3 各工程事件的強度、主頻率范圍表
表4 強度、主頻率等級劃分表
根據表3工程事件的強度、主頻率范圍和表4的等級劃分情況,可得到5個工程事件在時、頻域上的特征信息,如表5所示。

表5 各事件在時頻域上的特征信息表
從表5可以看出,各事件組在特征上存在差別。因此,可采用將各工程事件的時域、頻域信號強度排序定級的方法,對工程事件的特征進行定量化,從而快速識別出隧道周圍發生的工程事件,并據此做出響應。
3.2 事件定位精度
本次試驗振動感測光纜沿隧道縱向布設,當事件發生時,信號局部強度變大,通過尋找局部強度最大位置即可確定事件發生位置,如圖12所示。
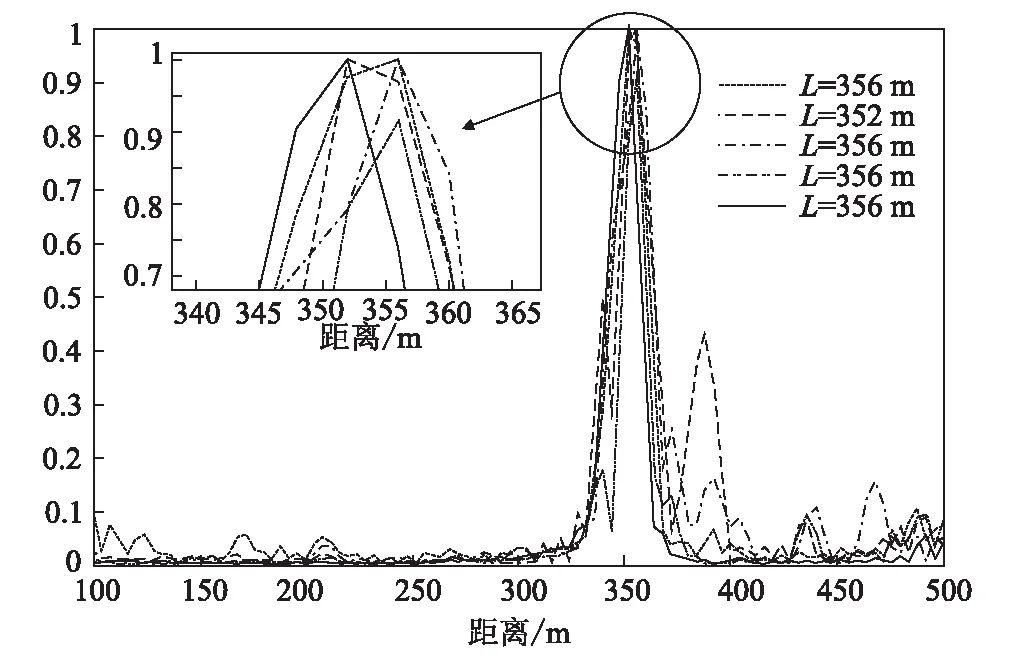
圖12 事件沿光纖皮長定位圖
從圖12可以看出,振動感測光纜感測到5次重復試驗事件信號的最大強度位置均位于350~360 m范圍內,將信號局部放大后,發現第2次試驗光纜識別事件的位置稍有偏差,位于352 m處,其余4次識別事件均發生于356 m處。由此可見,該振動監測系統沿隧道縱向的定位精度可靠,精度可達到±4 m。
當事件沿垂直隧道方向遠離光纜時,局部振動強度下降,通過分析局部振動強度的變化情況,可判定事件發生位置與光纜之間的距離,如圖13所示。

圖13 事件距離光纜垂直距離估計圖
從圖13可以看出,隨著事件發生位置與感測光纜間垂直距離的增大,感測光纜所采集到的信號強度變弱,且二者幾乎成線性關系,可據此估算事件發生位置與光纜的實際距離。
將事件實際發生距離與估計距離進行對比,結果如圖14所示。從圖14可以看出,估計距離與實際發生距離十分接近,但偏大或偏小無法判斷,最大偏差-2.8 m的事件位置距離感測光纜最遠,符合工程經驗。由此可見,該振動監測系統垂直隧道縱向的定位精度可靠,精度可達到±3 m。

圖14 垂直定位估計偏差圖
綜上可知,該振動監測系統可通過事件發生的時、頻域信號情況快速判別事件特征,且可較為準確地識別出事件發生的位置范圍。當事件發生時,基本可將發生位置鎖定在1個4 m×3 m(沿隧道方向×垂直隧道方向)的范圍內,這對隧道施工、運營期的監測及突發事件的排查具有重要價值。
4 結論
本文通過采集并分析鉆機打孔、挖掘機鏟土、工程車輛行駛和隧道內落石的現場試驗數據,驗證了基于分布式光纖隧道振動監測系統的靈敏度與可靠性。
(1)京雄高速鐵路隧道振動監測系統可準確感知隧道周圍不同工程事件的強度和頻率,并識別出振動事件的特征。
(2)通過時、頻域分析方法,可短時間確定振動事件發生的位置,具有較高的定位精度,能滿足工程對突發事件準確定位的需求。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
