基于示功圖的油井供液能力智能識別方法研究
2022-03-17 03:50:22陳夕松錢帥康
石油化工應用 2022年2期
夏 峰,陳夕松,錢帥康,姜 磊
(1.東南大學自動化學院,江蘇南京 210096;2.南京富島信息工程有限公司,江蘇南京 210061)
我國大部分油田屬于低滲透油田,其豐度低[1]、滲透率低、單井產能低[2],導致目前采油機的抽油能力與油井底層供液能力難以精準匹配,采油機泵效低,耗電量大,抽油成本高。企業需要對采油機井的供液能力實時分析并制定沖次調節策略,實現采油機抽油能力與油井供液能力的準確匹配,達到節能增產的目的。
在采油過程中,傳統上企業常采用動液面來衡量油井的供液能力,但動液面的測量成本較高且在動液面深度較深或受氣體影響時測量結果并不準確[3]。隨著示功圖測試技術的不斷進步,目前企業多憑借人工經驗從示功圖中定位凡爾開閉點并據此計算油井的供液能力[4]。該方法雖彌補了傳統方法的不足,但仍存在實時性差和人工成本高等問題。
近年來,人工智能技術的發展為油井供液能力的定量化分析提供了技術支撐[5]。卷積神經網絡回歸模型可用于關鍵點的回歸任務,這為從示功圖中定位采油機的凡爾開閉點提供了可能。但前期研究表明,如果簡單的將卷積神經網絡應用于示功圖凡爾開閉點識別這種細粒度、高精度任務上,極易導致網絡模型存在精度和空間泛化能力上的不足。因此,亟需一種為凡爾開閉點識別任務定制化的卷積神經網絡回歸模型來解決上述問題。
1 方案設計
采用深度學習網絡提取示功圖圖像特征進行訓練,首先需要對原始的示功圖二維數據進行數據預處理并繪制成示功圖圖像;然后為示功圖圖像數據集標定凡爾開閉點標簽并將其劃分為訓練集、驗證集和測試集;最后構建適合凡爾開閉點識別任務的深度學習網絡模型并通過訓練集和驗證學習網絡參數,根據測試集結果評估其泛化能力。
1.1 數據預處理
對原始的示功圖二維數據進行數據預處理并繪制成示功圖圖像,主要步驟如下:
(1)由于傳感器等不穩定因素,原始的示功圖數據可能存在異常數據。本文將超出示功儀位移及載荷量程的數據定義為異常數據,對其進行過濾剔除以保證數據集的正確性。
(2)將過濾后的示功圖位移及載荷數據歸一化映射到[0,1]的范圍內,對過濾后的示功圖位移x=[x1,x2,…,xm]和載荷f=[f1,f2,…,fm],歸一化公式如下:

式中:m-每個示功圖原始樣本數據集中位移和載荷的采樣點數;xmax-抽油機的最大沖程;fmax-抽油機的最大載荷。
(3)新建w×h 的二維網格,將(2)中的歸一化結果映射到該網格坐標中并進行向下取整,得到網格化后位移和載荷數據對應的像素點坐標r 和c,兩者間的映射關系如下:

在本文中,考慮到深度學習網絡常用到的輸入圖片大小及格式,設置w=h=256。
(4)將(3)中得到的示功圖二維像素坐標點按照順序兩兩相連至最后一點,形成封閉曲線,并借助OpenCV 庫的工具將該二維網格可視化為示功圖圖像,圖像尺寸為w×h。
1.2 標簽生成及數據集劃分
對繪制完成的示功圖圖像,從中標注出四個凡爾開閉點:固定凡爾開啟點A、固定凡爾關閉點B、游動凡爾開啟點C 和游動凡爾關閉點D,并通過圖像處理工具LabelMe 生成四個點的像素點坐標值(rA,cA)、(rB,cB)、(rC,cC)和(rD,cD),為了消除量綱影響,讓網絡模型更快的收斂,將像素點坐標值歸一化至[-1,1]作為該示功圖圖像的標簽,歸一化公式如下:
采用留出法將標定好的示功圖圖像數據集及其標簽按照固定比例6:2:2 劃分為訓練集、驗證集和測試集。
1.3 構建網絡模型
本文采用融合了特征金字塔、高斯熱力圖和注意力機制的深度學習網絡模型提取示功圖圖形特征并識別功圖的四個凡爾開閉點,具體網絡結構(見圖1)。相較于傳統的關鍵點識別任務中使用到的神經網絡預測模型,本文的模型根據凡爾開閉點識別任務的特殊性做了以下三點改進:

圖1 凡爾開閉點智能識別模型網絡結構圖
(1)在提取特征的主干網絡中嵌入了注意力機制模 塊Convolutional Block Attention Module(CBAM),CBAM 是一種結合了空間和通道的注意力機制模塊。注意力機制是一種聚焦于局部信息的機制,它的本質是定位到重要的信息,抑制無用的信息。空間注意力機制是尋找圖像中對任務貢獻最大的區域并讓網絡聚焦于該區域,而通道注意力是讓網絡關注于圖像中對任務重要性更高的特征。本文的凡爾開閉點識別任務屬于一種細粒度的定位任務,因此需要引入CBAM 模塊增加主干網絡的表征能力,讓網絡模型定位到對識別凡爾開閉點有價值的圖片區域并關注該區域中對識別凡爾開閉點更有價值的特征。
(2)將主干網絡提取到的不同尺度的特征進行特征融合。本文采用特征金字塔網絡Feature Parymid Network(FPN)自上而下融合特征,融合后的特征同時利用了高分辨率的低層特征和具有語義信息的高層特征,而凡爾開閉點的定位任務也需同時結合這兩種維度的特征。將不同層級的融合特征圖分別用于凡爾開閉點識別任務,不僅能夠測試不同尺度特征對凡爾開閉點的檢測能力,還能夠通過特征層級的分辨率來控制高斯熱力圖的分辨率。
(3)以高斯熱力圖Heatmap 的方式代替傳統全連接層來預測最終的凡爾開閉點坐標。采用傳統的全連接層直接回歸四個凡爾開閉點的做法優點是整個網絡的輸出即為坐標點,同時整個模型的訓練速度較快。但采用全連接層作為最終預測層會使得網絡模型缺乏空間泛化能力,即讓網絡丟失了特征圖上的空間信息。基于高斯熱力圖輸出凡爾開閉點,其輸出的特征圖較大,空間泛化能力強,能夠讓網絡模型學習到凡爾開閉點空間信息和點之間的相對位置關系,從而保證網絡模型的平移等價性,這在載荷經常上下波動的示功圖圖像中尤為重要。
1.4 模型訓練及測試
本文選取某原油開采企業2020 年1 月1 日到2020 年1 月25 日期間8 口抽油機井的示功圖原始二維數據生成的示功圖圖像共8 672 張按照6:2:2 的比例構建訓練集5 204 張、驗證集1 734 張和測試集1 734 張,模型在訓練集和驗證集上的損失函數值變化趨勢(見圖2)。
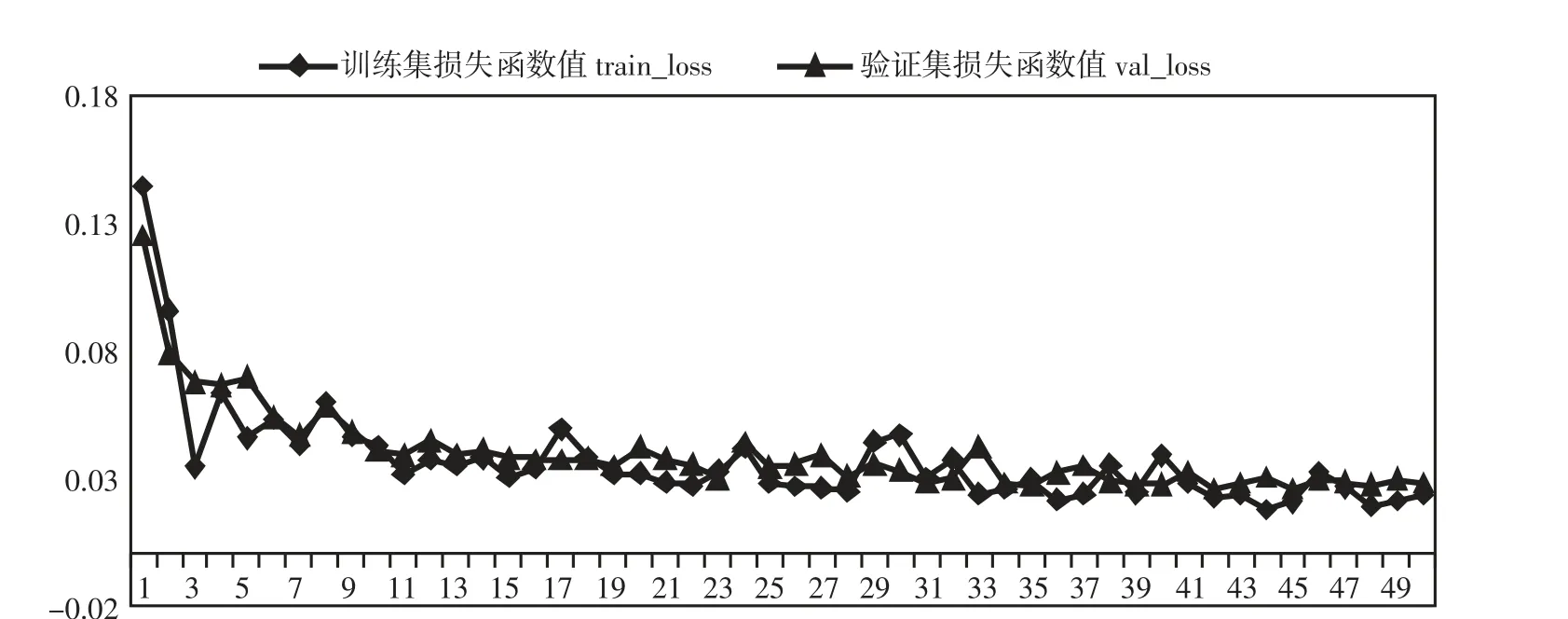
圖2 損失函數值變化趨勢圖
將測試集數據輸入至訓練好的神經網絡模型中,并根據模型預測的結果,將預測的凡爾開閉點坐標通過OpenCV 庫可視化至輸入圖片中,結果表明在幾種典型工況下,該模型均能準確識別出示功圖的四個凡爾開閉點(見圖3)。
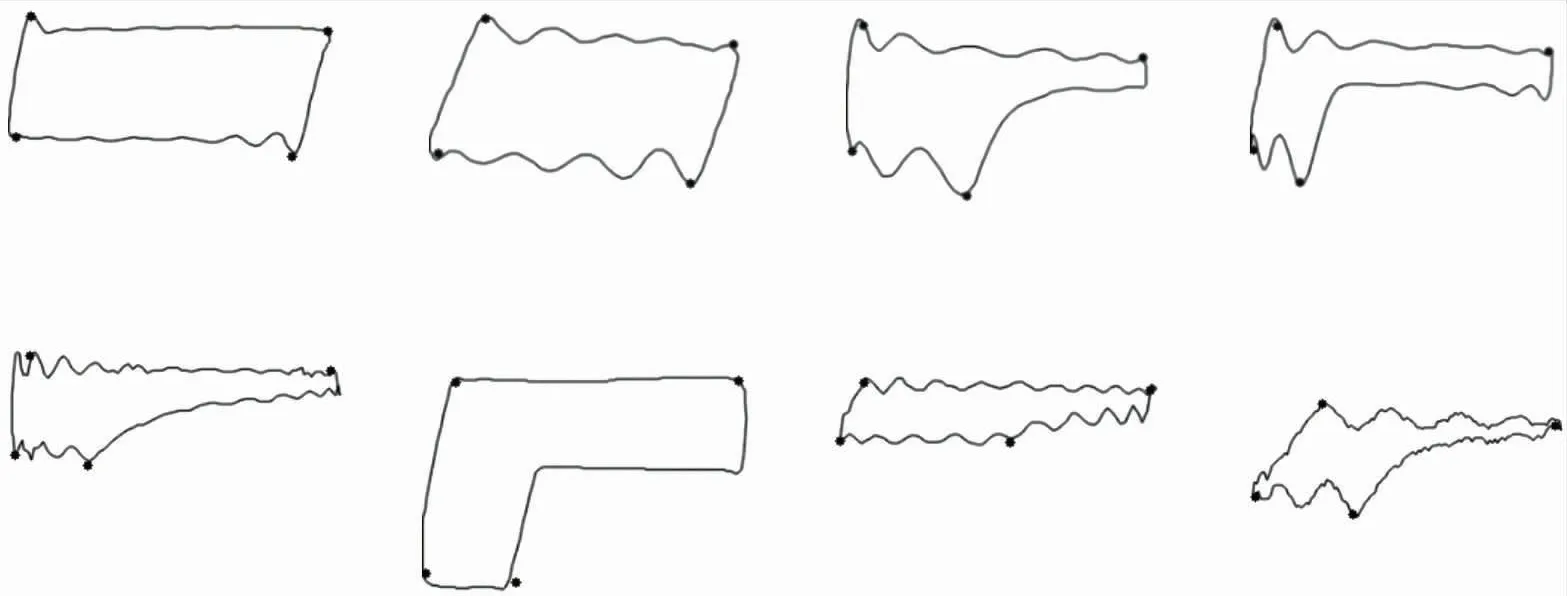
圖3 測試集結果示例
1.5 量化供液能力
首先將采油機實時工況記錄的示功圖輸入至訓練完成的深度學習網絡模型中獲取對應的凡爾開閉點標簽({xA,yA),(xB,yB),(xC,yC),(xD,yD)},然后根據凡爾開閉點標簽計算凡爾開閉點的像素點坐標值,計算公式如下:
接著根據凡爾開閉點識別像素點坐標值計算抽油機的有效沖程Spe,計算公式如下:

最后,根據有效沖程Spe和采油機運行時沖程S 的比值量化供液能力指標β:

1.6 消融實驗
為了驗證本文提出的深度學習網絡模型中特征金字塔、高斯熱力圖和注意力機制對凡爾開閉點定位的有效性,本文使用同樣的數據集和訓練參數進行消融實驗。實驗結果用測試集誤差和是否具有平移等價性這兩個指標衡量,測試集誤差通過計算測試集的標簽和實際預測結果間的均方根誤差得出,是否具有平移等價性則表示網絡模型的輸出是否會隨輸入圖像的平移變換做出等價的平移變換,實驗結果(見表1)。

表1 消融實驗結果
首先,移除高斯熱力圖預測模塊并通過傳統的全連接層點回歸的方式預測關鍵點位置,實驗結果表明,網絡模型的測試集誤差上升,同時模型也失去了平移等價性(見圖4)。然后,再移除網絡中的CBAM 注意力機制模塊,實驗結果表明雖然整個測試集誤差上升較少,但在游動凡爾開啟點上的預測精度下降了很多(見圖4)。最后,移除網絡模型中的FPN 模塊,實驗結果表明,由于特征提取網絡的輸出特征圖只包含高層的語義信息且特征圖尺寸較小,導致最終預測的高斯熱力圖出現了分辨率大幅下降的情況。

圖4 網絡模型測試結果
2 應用研究
本文選取某原油開采企業9 臺抽油機的示功圖原始數據進行實驗。以2020 年3 月至2020 年5 月之間的數據構建示功圖數據集,分析本文方法對抽油機供液能力識別的有效性。
在網絡模型完成訓練后,以某原油開采企業一口抽油機井在2021 年2 月的示功圖原始數據作為實際應用對象,引入本文提出的供液能力智能識別算法。在2月18 日時,算法自動檢測到此時抽油井的供液能力低于正常閾值,此時的示功圖(見圖5),智能識別算法的識別結果為 {(-0.69,-0.67),(0.90,-0.38),(-0.48,0.55),(-0.94,-0.33)},分別對應固定凡爾開啟點A 的標簽值(-0.69,-0.67),固定凡爾關閉點B 的標簽值(0.90,-0.38),游動凡爾開啟點C 的標簽值(-0.48,0.55)和游動凡爾關閉點D 的標簽值(-0.94,-0.33),將這些標簽值按照式(4)反歸一化后得到四個點的像素點坐標為:固定凡爾開啟點A 的像素點坐標(39.68,42.24),固定凡爾關閉點B 的像素點坐標(243.20,79.36),游動凡爾開啟點C 的像素點坐標(66.56,198.40)和游動凡爾關閉點D 的像素點坐標(7.68,-85.76),根據這四個凡爾開閉點的像素點坐標和式(5)計算其有效沖程Spe為1.38 m,最后由公式(6)計算出供液能力指標β 為23%,該值小于由專家設定的沖次下調供液能力指標閾值,因此選擇以0.1 的步長向下調整抽油機沖次,調節周期為1 d,在經過兩日的沖次調節后,該抽油機井經濟效益有所上升(見表2)。
圖5 實時工況示例圖

表2 沖次調節后油井生產數據
由上述分析可知,本文提出的油井供液能力智能識別算法,能夠實時監測抽油機井供液能力的變化,從而根據供液能力指標動態調節抽油機沖次。通過本文提出的方法可以實現實時、準確的抽油機供液能力識別,為后續油井的智能控制提供可靠的調節依據。
3 結語
本文提出了一種基于示功圖的油井供液能力智能識別方法,該方法基于采油過程中生成的示功圖,搭建卷積神經網絡回歸模型識別示功圖的凡爾開閉點。通過在網絡模型中融合高斯熱力圖、特征金字塔和注意力機制以滿足凡爾開閉點識別任務對細粒度和高精度的需求,從而準確高效地識別四個凡爾開閉點并據此實時量化采油機井的供液能力,為后續的沖次調節和間抽控制提供可靠的理論支撐。相較于傳統方法,該方法在識別實時性上提升顯著,滿足了企業工程應用需求,對降低抽油機系統能耗,增加油田產量具有良好的應用價值。
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
發明與創新(2022年30期)2022-10-03 08:40:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04
中國煤層氣(2014年6期)2014-08-07 03:07:05
河南科技(2014年23期)2014-02-27 14:19:15