基于ZYNQ7020的偏振模式檢測系統設計
2022-03-17 10:15:42康健馬偉李皓李沅
電子測試 2022年5期
康健,馬偉,李皓,李沅
(中北大學信息與通信工程學院,山西太原,030051)
0 引言
太陽光在射入地球大氣層之后受到大氣層中多種空氣成分的散射以及地面、水面等的反射會形成部分偏振狀態的偏振光,這些部分偏振光形成的偏振狀態分布模式會受太陽位置、大氣成分分布等因素影響。這一特性可以作為利用偏振光進行導航的參考依據。
哈爾濱工業大學的盧鴻謙等人將偏振光導航引入地磁、管道和衛星導航,形成了一種新的組合導航系統,通過偏振光導航數據實時修正慣性導航系統長時間工作累積的誤差,取得了更好的導航精度[1-3]。大連理工大學的褚金奎教授領導的研究團隊研制了一種納米金屬光柵偏振檢測器,將其應用于船隊編組中,引入了太陽位置數據,可實時修正天空偏振數據[4-7]。清華大學的趙開春等人制作了多種旋轉式偏振檢測設備,裝置小巧,并且獲得了不錯的精度。
中北大學的王玉波、劉俊等人基于一種改進的偏振角模型,提出了一種三通道偏振成像系統,與常用的點源式測量方式相比,該方法有更高的解算精度和更寬的視野范圍。
1 天空偏振模式的檢測方法
太陽光在射入大氣層之后受到各種大氣成分的散射等影響后主要形成的是部分偏振光,所以斯托克斯矢量(Stokes)是大氣偏振探測領域最常用的測量方法,可表示為:

在自然環境中,偏振光的V分量很微弱通常忽略不計。
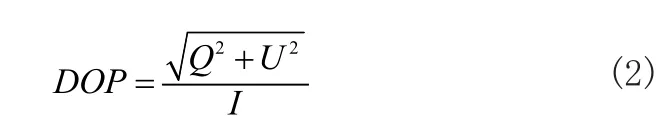
DOP為偏振度,可表示為:
設入射偏振光E-矢量與探測器參考正方向的夾角為偏振角AOP,可表示為:

則光電轉換器件檢測到的入射光強Iin與Stokes矢量之間本文采用旋轉檢偏的方式設計并制作了一種單通道偏振光探測器,相較于多通道點源式檢測方法能有降低成本和體積,減小裝配對準難度的優點。
的關系可表示為:

若θ取0°、45°和90°進行光強采集得到偏振度和偏振角的解算公式:

因此只需要利用電機轉動線性偏振片來獲得連續不同角度下光電轉換器件檢測到的光強值,就可以解算出偏振度和偏振角參數。
2 系統方案設計
2.1 系統總體方案設計
本文系統采用XILINX ZYNQ7020 Soc芯片作為系統采集控制芯片,以實現外部高速模擬信號和數字信號的采集,存儲和機內解算。系統主要分為3部分,3PA1030外部模擬信號ADC采集模塊、掛載在RS485總線上的高速編碼電機、采用MP2236和XC6204-332MR芯片為主的電源模塊,系統總體框圖如圖1所示。
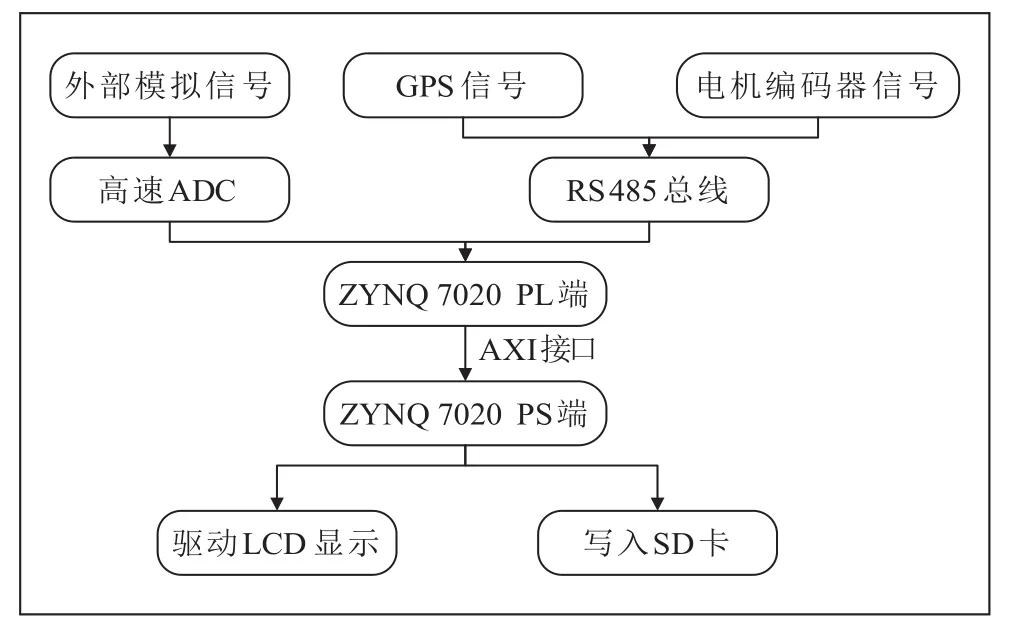
圖1 系統總體框圖
2.2 硬件電路模塊
高速高精度AD采集離不開能提供穩定工作電壓的電源模塊,設計采用MP2236和XC6204-332MR芯片分別提供5V和3.3V電壓。電源模塊原理圖如圖2所示。

圖2 電源模塊電路原理圖
MP2236是一款高頻同步整流降壓開關電源芯片,有600KHz的開關頻率,散熱良好的條件下能提供穩定6A的輸出電流,適應3-18V寬幅輸入電壓。通過改變其中前饋電容和電感C9和L1分別為220pf和3.3uH得到模塊最佳輸出電壓,其輸出3A電流時紋波為24mV動態響應度為76mV。
特瑞仕XC6204-332MR是一款高速線性穩壓器(LDO)能提供穩定3.3V的ADC供電電壓,滿足系統需要。
2.3 高速AD采集模塊
為了對外部模擬信號輸入進行高速高精度采集,系統選用瑞恩浦公司生產的3PA1030芯片,輸出引腳為D0~D9,輸出數據以二進制表示,可提供10bit采樣精度。輸入電壓范圍為0~2V,分辨率可達2mV,當輸入電壓超過量程后,OVR引腳會拉高。內置片內采樣保持放大器(SHA),集成了基準電壓源不需外接基準電壓即可工作,其內部框圖如圖3所示。

圖3 3PA1030 內部框圖
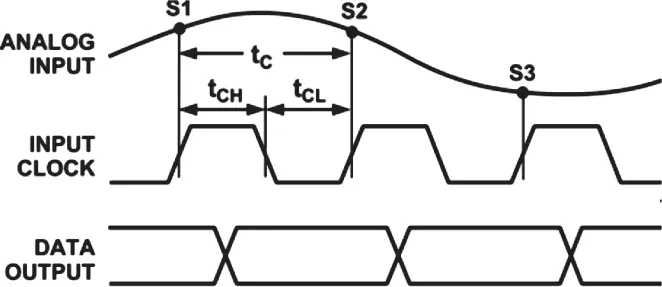
圖4 3PA1030 時序圖
根據3PA1030的時序圖可知,芯片在時鐘上升沿進行采樣,通過ZYNQ7020的時鐘提供50MHz的輸入時鐘信號,可以實現50MSPS的模數轉換速率,AD采集模塊電路原理圖如圖5所示。
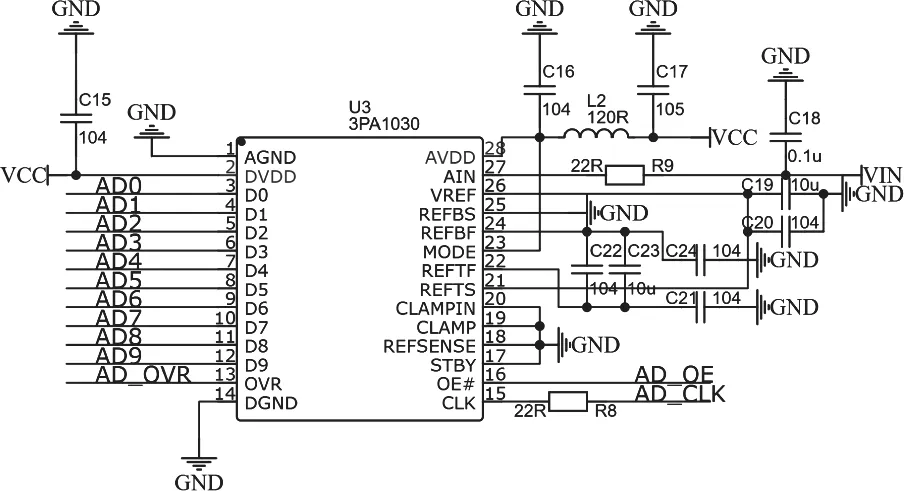
圖5 AD采集模塊電路原理圖
2.4 電機驅動和偏振模式檢測裝置結構
在設計實現偏振片高速運動時,需要得到高精度的偏振片角度信息。系統選用上海光毓機電公司生產的RMD-S系列編碼電機,型號為DM4005,編碼器采用差分信號傳輸,可以掛載在主控的RS485總線上,可提供0.01°的角度精度,滿足系統需要。
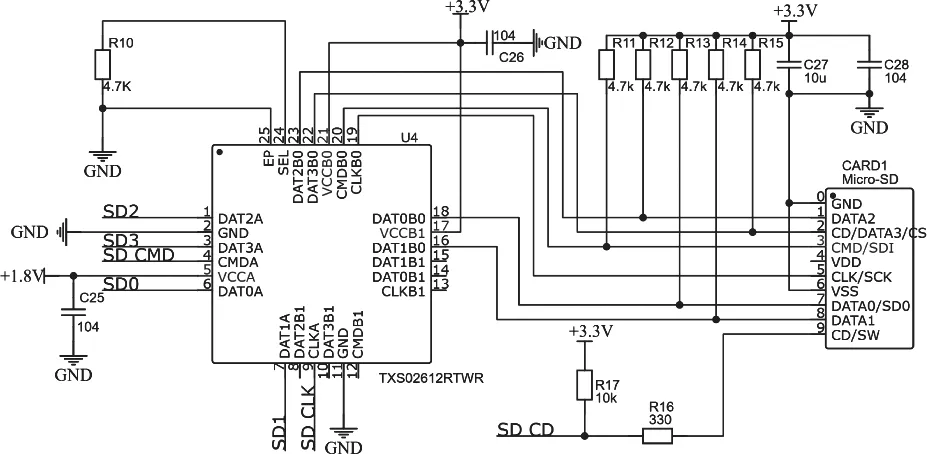
圖6 SD存儲模塊電路原理圖

圖7 LCD顯示模塊電路原理圖
為保證電機和偏振片旋轉時角速度同步并且旋轉順暢,根據漸開線齒輪參數方程,如式(5)、式(6)所示,制作了1:1大小的標準漸開線齒輪,如圖8所示。

圖8 標準漸開線齒輪示意圖

其中rb為基圓半徑。
裝置實物圖如圖9所示,為了方便裝置日后升級,在左側預留了可裝入偏振相機的安裝孔位。并且設計了不同1/4螺絲孔安裝底座,方便安裝在無人車、無人機、三維精密轉臺等不同裝載平臺上。
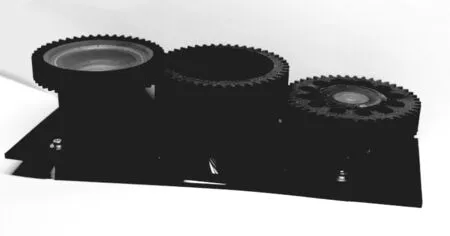
圖9 偏振模式檢測裝置
3 實驗與結果
將裝置裝載精密三維轉臺上,設置轉臺分別按順時針、逆時針方向做往復運動,在室內環境下采集人造偏振光源的偏振信息,設置裝置電機旋轉速度為360deg/s,ADC采樣率為1MBPS,采集到的電機旋轉一周時間內光電轉換器件的電壓值變化情況如圖10所示,曲線趨勢與理論趨勢相符。裝置機內解算得到轉臺正反轉的角度數據如圖11所示,通過與精密轉臺自身角度參數比較得到裝置在室內試驗中的誤差曲線如圖12所示。
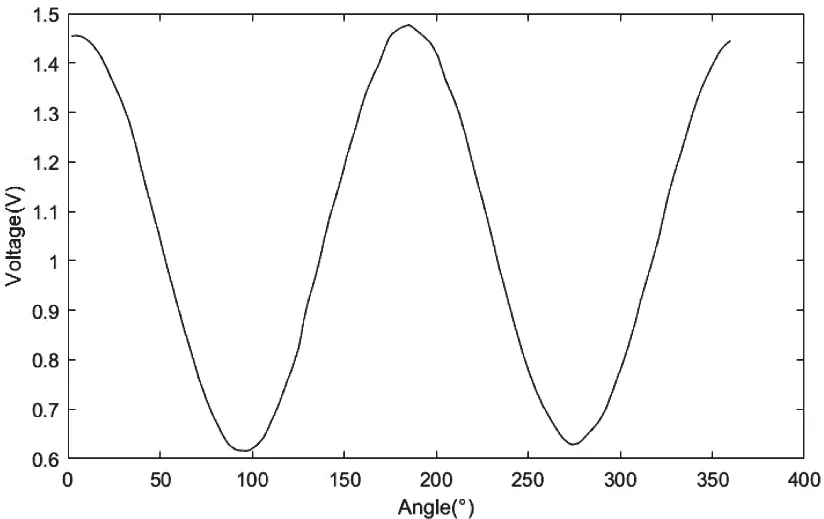
圖10 一個周期采集的電壓信號

圖11 原地正反轉解算航向角
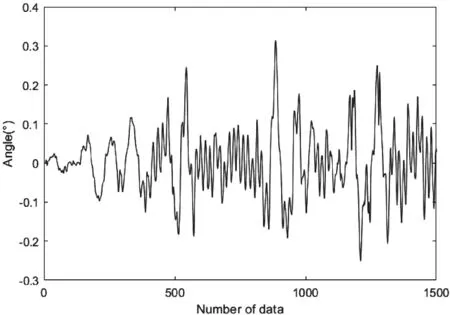
圖12 航向角解算誤差
將無人車放置在中北大學東區足球場外圍路段,該路段周圍建筑物、樹木遮擋較少,適合進行室外采集實驗。設置無人車按預定實驗軌跡運動如圖13所示,采集得到的航向角數據如圖15所示。

圖13 實驗軌跡

圖14 基于偏振光的組合導航無人車

圖15 航向角解算數據
從圖15和圖16可以看出,室外實驗時誤差最大值出現在三次轉彎處附近,最大動態誤差為2.61°。該無人車采用獨立懸掛,加之路面凹凸不平,致使轉彎處會出現較劇烈的車身晃動。因此,在采集偏振信息時,應盡量保持采集裝置水平穩定,最大限度避免因裝置俯仰角和橫滾角的變化引起的測量誤差。
圖16 航向角解算誤差
4 結論
基于ZYNQ7020的高速偏振模式檢測系統已經與傳統陣列式和成像式偏振模式檢測系統同時應用于無人車上,相較后兩種檢測方式,該系統有采樣率高、體積小、便捷性強的優勢,適合與其他導航方式共同為無人系統提供導航數據,為后續的系統升級和研究深入打下一定的基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34