干線信號協(xié)調(diào)背景下的網(wǎng)聯(lián)公交實時優(yōu)先控制方法
2022-03-18 05:33:40歐詩琪俞春輝馬萬經(jīng)
同濟大學(xué)學(xué)報(自然科學(xué)版) 2022年3期
關(guān)鍵詞:信號
歐詩琪,俞春輝,馬萬經(jīng)
(同濟大學(xué)道路與交通工程教育部重點實驗室,上海 201804)
近年來城市地面交通擁堵問題突出,發(fā)展公交能引導(dǎo)人們減少私家車出行而緩解這一問題。而公交優(yōu)先則能提升公交系統(tǒng)的效率和可靠性。“公交優(yōu)先”于20世紀(jì)60年代初,率先在法國巴黎實施[1];1967年美國洛杉磯公路局Wilbur等人提出公交信號優(yōu)先,從時間層面給予公交優(yōu)先路權(quán)[2]。公交信號優(yōu)先控制也因其調(diào)控靈活度高被廣泛應(yīng)用。現(xiàn)有公交信號優(yōu)先研究按照不同控制策略可以分成被動優(yōu)先[3]、主動優(yōu)先[4-5]和實時優(yōu)先[6-8]。但以往的研究考慮范圍局限在交叉口,少有考慮公交信號優(yōu)先對已有的干線信號協(xié)調(diào)的影響。近年來眾多研究也指出這一問題,認(rèn)為公交優(yōu)先和信號協(xié)調(diào)問題應(yīng)一起考慮[9-11]。
但公交優(yōu)先和信號協(xié)調(diào)的控制目標(biāo)不完全一致,甚至相互沖突。公交信號優(yōu)先類型包括相位延長、早斷、相位插入等[12],需調(diào)整交叉口信號控制方案;而信號協(xié)調(diào)方案考慮周期和相位差,以設(shè)計出協(xié)調(diào)相位的綠波帶[13],因此信號優(yōu)先可能會影響協(xié)調(diào)相位綠燈開始或結(jié)束時間而破壞已有干線信號協(xié)調(diào),影響社會車輛的通行效率。此外,缺乏考慮公交干線信號協(xié)調(diào)還可能造成公交無效優(yōu)先,即公交在某一個交叉口獲得信號優(yōu)先減少的延誤可能在下游交叉口遇到紅燈而抵消[14]。例如,在背景信號協(xié)調(diào)方案中公交原本需在下游交叉口停車(子區(qū)斷開),則本交叉口不必進行無效的信號優(yōu)先,公交將在同一時刻離開下游交叉口。因此,如何配合已有干線信號協(xié)調(diào),同時考慮社會車輛實時狀態(tài)、公交車停站等特性,充分利用時空資源進行有效的公交信號優(yōu)先等問題亟待解決。網(wǎng)聯(lián)技術(shù)的發(fā)展,使實時準(zhǔn)確的公交狀態(tài)信息可獲取,實時控制策略(如駐站控制時長、速度引導(dǎo))可下發(fā)至公交車[15-16],如何利用這些技術(shù)在實現(xiàn)公交優(yōu)先提升效率的同時,改善社會車輛的總體運行效益,仍需探索。
本文提出了干線信號協(xié)調(diào)背景下的網(wǎng)聯(lián)公交實時優(yōu)先控制方法。在路段上,根據(jù)公交實時位置預(yù)測到達(dá)停車線的時間,并以公交能在綠燈期間到達(dá)交叉口停車線為目標(biāo)進行速度引導(dǎo);在交叉口范圍內(nèi),考慮已有信號協(xié)調(diào)方案,以公交不停車通過協(xié)調(diào)子區(qū)內(nèi)多個交叉口為目標(biāo),生成信號優(yōu)先申請,并建立協(xié)同的公交速度引導(dǎo)和駐站控制實時計算方法;最后,在滿足信號優(yōu)先需求的情況下以社會車輛延誤最小為目標(biāo)進行信號優(yōu)化,最大程度地利用已有干線協(xié)調(diào)實現(xiàn)公交優(yōu)先通行,并保障其余相位社會車輛行駛的效益。案例分析表明,該方法在提升信號優(yōu)先效率和改善社會車輛通行效益方面具有顯著效果。
1 問題描述
如圖1所示干道,東西向設(shè)有路中式公交專用道和信號協(xié)調(diào)方案(社會車輛綠波帶和公交綠波帶)。公交車具有網(wǎng)聯(lián)功能,其實時位置信息、行駛速度等狀態(tài)信息可獲取,且可接收實時的控制策略。交叉口進口道設(shè)有公交專用車道,設(shè)有線圈可檢測社會車輛實時流量信息。基于此,本文研究的問題可以歸結(jié)為:在干線協(xié)調(diào)控制背景下,如何實時優(yōu)化隨機到達(dá)的公交車的速度引導(dǎo)策略、駐站控制策略和交叉口信號優(yōu)先方案,盡可能降低公交不停車次數(shù),同時最大化社會車輛效益。信號控制使用雙環(huán)結(jié)構(gòu),每個相位都可早啟或延長。相位的綠燈早啟,等同于優(yōu)先相位的紅燈早斷。便于建模,把路口的上行、下行協(xié)調(diào)相位分別置于頂部、底部的環(huán),稱為上行環(huán)和下行環(huán),圖1中j指相位號碼。周期開始和結(jié)束的時刻不變,公交通行相位為2、3、6、7;允許上下行雙向行駛的公交在同一個交叉口提出優(yōu)先申請,但優(yōu)先申請不沖突。
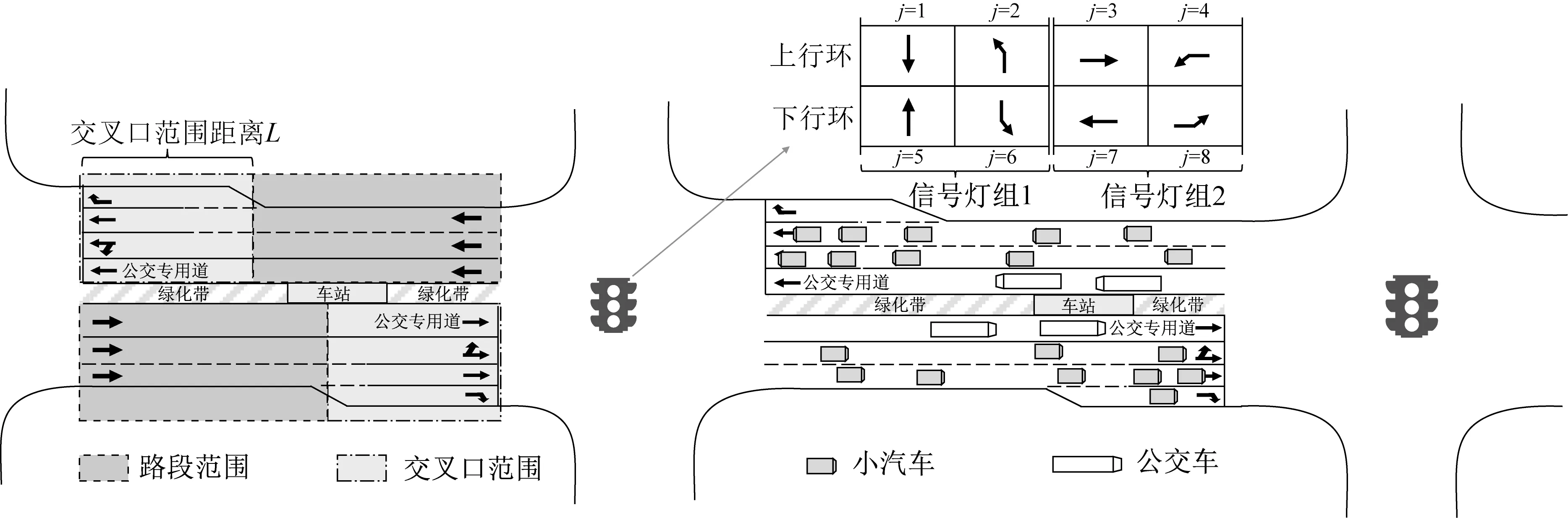
圖1 問題場景Fig.1 Problem scenario
2 優(yōu)化模型與方法
2.1 總體控制邏輯
根據(jù)前述分析,為不失一般性,針對干線中任意一個交叉口及其上游路段,建立總體邏輯流程如圖2所示。基本邏輯為:當(dāng)公交仍在路段上行駛未到達(dá)交叉口范圍且路段無車站時,基于路段速度引導(dǎo)算法對車輛的速度進行控制;當(dāng)公交到達(dá)交叉口范圍內(nèi)時,根據(jù)是否設(shè)有公交站臺,考慮已有干線信號協(xié)調(diào)的影響,基于路口公交優(yōu)先申請生成算法,生成公交優(yōu)先申請、引導(dǎo)車速、駐站控制時長;最后在交叉口,以公交優(yōu)先申請為約束求解考慮社會車輛的信號優(yōu)先優(yōu)化模型,并根據(jù)求解結(jié)果生成最終的控制策略,包括車速、駐站時間、信號優(yōu)先方案,以解決如何在信號協(xié)調(diào)背景下進行有效的公交優(yōu)先控制問題。其中交叉口范圍和路段范圍如圖1所示。

圖2 網(wǎng)聯(lián)公交實時優(yōu)先方法總體控制邏輯流程Fig.2 Flowchart of connected bus real-time priority control
2.2 路段速度引導(dǎo)算法
在路段無車站時以及最下游車站在交叉口范圍外時,進行實時公交速度引導(dǎo)。通過速度搜索方法,確定公交能在綠燈期間通過的最大速度。步驟如圖3所示。
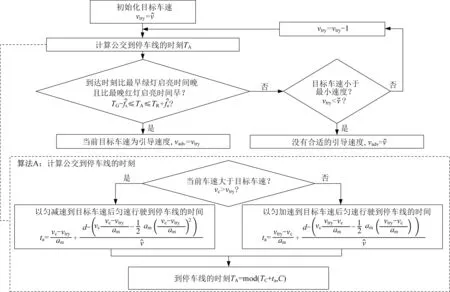
圖3 公交路段速度引導(dǎo)算法流程Fig.3 Flowchart of bus speed advisory
步驟1:初始化目標(biāo)車速為公交運行的最大車速vtry=。
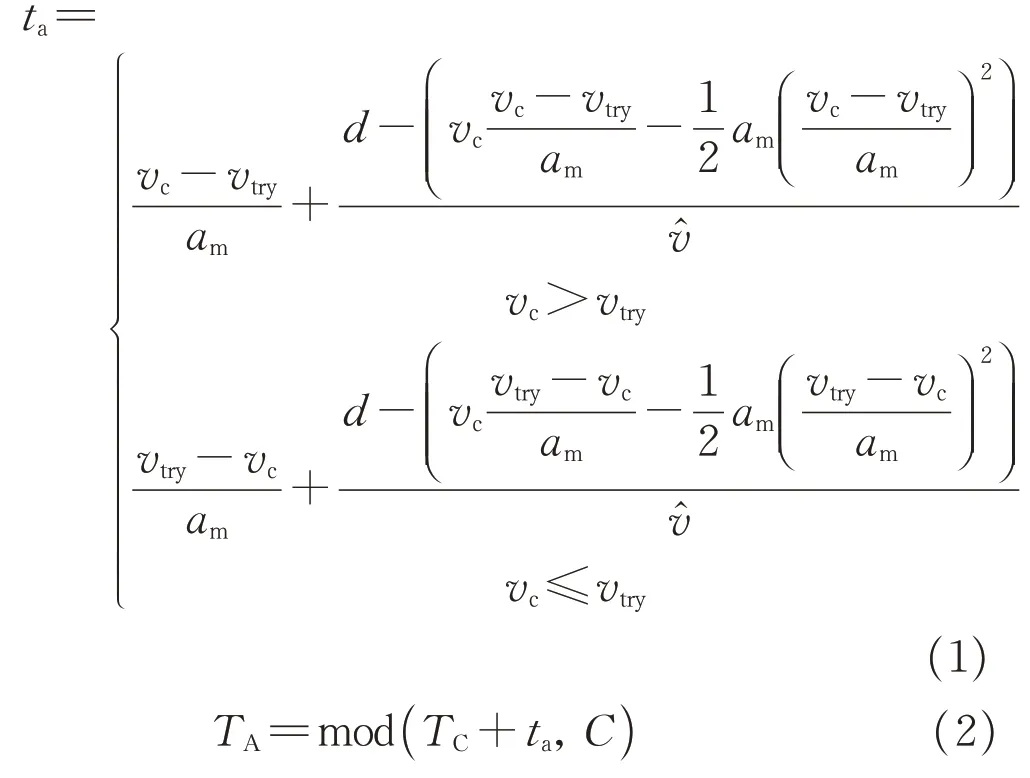
步驟2:當(dāng)前公交速度大于目標(biāo)車速時(vc>vtry),則公交勻減速到目標(biāo)車速后再勻速行駛至停車線;否則(vc≤vtry),公交勻加速到目標(biāo)車速后再勻速行駛至停車線,用時ta如公式(1)所示。進而計算公交到達(dá)停車線的時刻TA(在周期中的第幾秒),如公式(2)所示。
式(1)、(2)中:am為公交加減速時的加速度;d為公交與交叉口停車線的距離;TC為當(dāng)前在周期中的時刻;C為交叉口信號控制周期。
步驟3:若公交到達(dá)停車線時刻位于進行了最大綠燈早啟和最大綠燈延長控制后的綠燈時段(TG-其中TG和TR分別為綠燈啟亮?xí)r刻和紅燈啟亮?xí)r刻分別為最大早啟時長和最大延長時長),則引導(dǎo)速度為當(dāng)前目標(biāo)車速vadv=vtry,結(jié)束算法;否則進行步驟4。
步驟4:若當(dāng)前目標(biāo)車速小于路段最小速度(vtry<),則沒有合適的引導(dǎo)速度,令引導(dǎo)速度為路段允許的最大車速vadv=;否則,令vtry=vtry-1后,返回步驟2。
2.3 路口公交優(yōu)先申請生成算法
首先需要計算公交優(yōu)先相位綠燈最大早啟時間和最大延長時間。綠燈最大早啟、延長時長考慮兩個因素:①公交相位綠燈按照最大早啟、延長時長優(yōu)先后周期剩余時間應(yīng)能滿足其余相位的最小綠燈時長;②優(yōu)先有效性,即公交在最大早啟、延長時刻通過當(dāng)前交叉口后也能不停車通過子區(qū)內(nèi)的下游交叉口,如公式(3)和(4)所示。其中相位j的最短綠燈時間fˇj考慮可接受最大相位飽和度s^下的綠燈時長與信號機中的最短綠燈時長gˇj,如公式(5)所示。
式(3)~(5)中:f~j為相位j原始的相位時長;Tp,s和Tp,e分別為考慮優(yōu)先有效性的最大早啟和延長時長;jx為公交優(yōu)先相位號碼;J為公交優(yōu)先相位所在環(huán)的最后一個相位的相位號碼;qj為相位j對應(yīng)車流量;sj為相位j的車道飽和流量;ej為相位j對應(yīng)的車道數(shù);Lg為綠燈損失時間;yj為相位j的清空時間。
進一步計算考慮優(yōu)先有效性的最大早啟和延長時長。不失一般性,要使公交通過當(dāng)前交叉口后能不停車通過子區(qū)內(nèi)任意下游交叉口i,則需保證公交離開當(dāng)前交叉口時在(已有信號協(xié)調(diào)方案的)綠波帶內(nèi)。由于交叉口都允許綠燈早啟和延長,綠波帶可拓寬,如圖4所示。進一步根據(jù)路段行程時間、停站時間、相位差,計算公交到達(dá)下游交叉口i的綠波帶最早開始時刻和綠波帶最晚結(jié)束時刻對應(yīng)的離開本交叉口的時刻,如公式(6)和(7)所示。
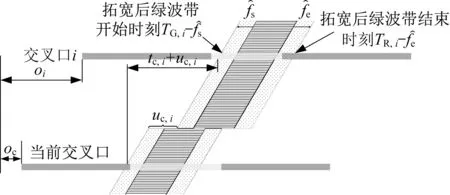
圖4 交叉口間拓寬綠波帶關(guān)系Fig.4 Expanded green wave between intersections

式(6)、(7)中:TG,i為下游交叉口i的綠波帶開始時刻;TR,i為下游交叉口i的綠波帶結(jié)束時刻;tc,i為當(dāng)前交叉口行駛到下游交叉口i的行程時間;uc,i為當(dāng)前交叉口行駛到下游交叉口i的停站時長;oi為下游交叉口i的絕對相位差;oc為當(dāng)前交叉口的絕對相位差。
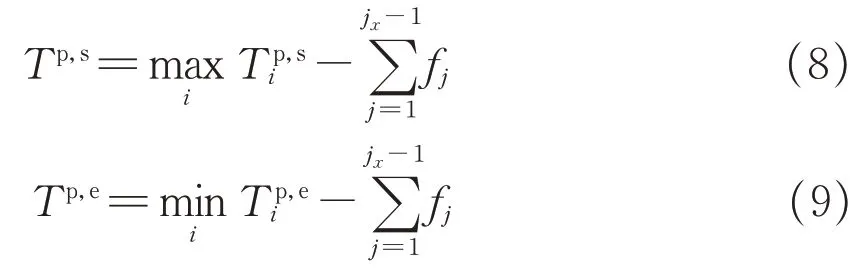
考慮子區(qū)內(nèi)所有下游交叉口拓寬后綠波帶開始和結(jié)束時刻,取所有下游交叉口拓寬綠波帶在本交叉口映射的交集,可得考慮優(yōu)先有效性的相位最大早啟時長Tp,s和最大延長時長Tp,e,如公式(8)和(9)所示。
建立路口公交優(yōu)先申請生成算法,輸出公交所需綠燈早啟、延長時長、建議車速、駐站時間。具體步驟如圖5所示,粗線框為不同條件下計算出來的最終結(jié)果。
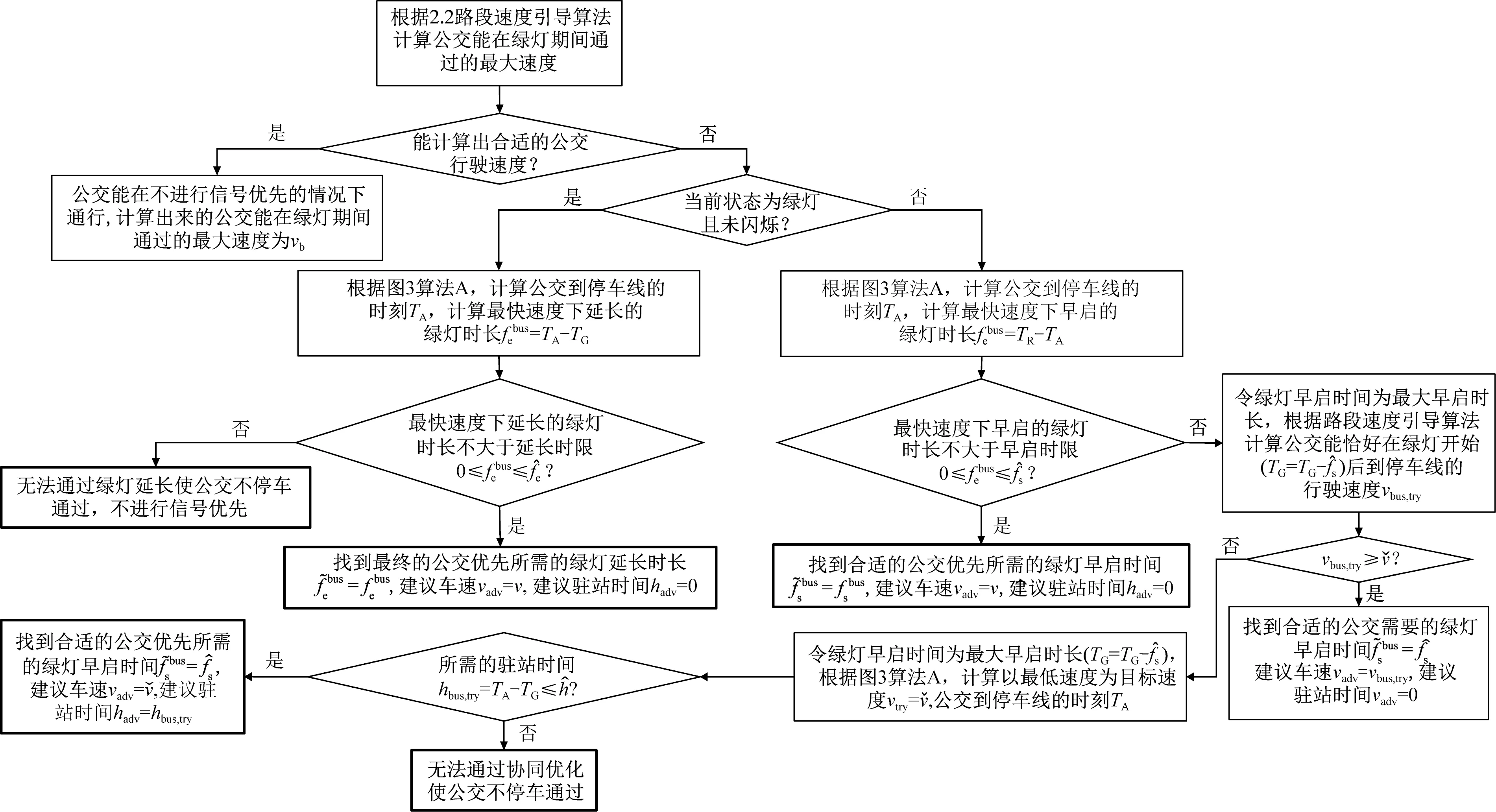
圖5 路口公交優(yōu)先申請生成算法流程Fig.5 Flowchart of bus priority request generation
步驟1:若路段速度引導(dǎo)算法能計算得到公交引導(dǎo)速度vb,則該公交能在不進行信號優(yōu)先的情況下不停車通過當(dāng)前交叉口,建議車速vadv=vb,公交優(yōu)先需求建議和駐站時間都為零,;若無法計算得到引導(dǎo)速度,則判斷交叉口當(dāng)前狀態(tài)是否為綠燈且未閃爍(若有),若是,則進行步驟2;若否,則進行步驟3。
步驟2:根據(jù)圖3算法A計算公交以最快速度行駛到達(dá)停車線的時刻TA,得到公交所需的綠燈延長時長fbuse=TA-TG,TG為公交優(yōu)先相位綠燈開始的時刻。若此時綠燈延長時長不大于最大延長時間,則公交優(yōu)先所需的綠燈延長時間=fbuse,建議車速vadv=v^,建議駐站時間hadv=0;否則表示無法通過綠燈延長使公交不停車通過,不進行
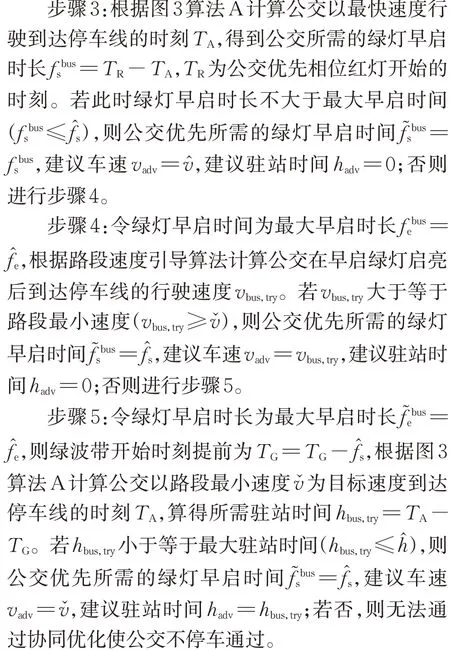
考慮到干線設(shè)有雙向綠波帶,若上行方向進口道和下行方向進口道都有公交提出申請,則分別計算它們所需的公交優(yōu)先時長。由于雙向的公交行駛方向所處的相位是同時放行的,因此這些公交優(yōu)先申請不會沖突,在下一步考慮社會車輛的信號優(yōu)先優(yōu)化模型中,約束滿足所有公交的優(yōu)先申請進行求解。
2.4 考慮社會車輛的信號優(yōu)先優(yōu)化模型
根據(jù)上述計算得到公交所需的綠燈早啟和延長時長作為約束,進一步建立以最小化社會車輛延誤為目標(biāo)的信號優(yōu)先方案優(yōu)化模型,求得考慮社會車輛行駛效益的信號優(yōu)化方案。優(yōu)化模型的變量為各相位早啟、延長時間。
2.4.1 目標(biāo)函數(shù)
模型的目標(biāo)是最小化社會車輛延誤。研究表明在非飽和情況下基于確定式排隊模型的延誤計算方法與考慮車輛到達(dá)隨機性的延誤計算模型差異小于6%[17],因此社會車輛延誤基于確定式排隊模型進行近似計算。在紅燈期間,社會車輛到達(dá)交叉口形成隊列,此時該進口道該流向流量q為到達(dá)率;綠燈啟亮后,隊列開始消散,消散率為總飽和流率,即該流向?qū)?yīng)的車道數(shù)e乘上一條車道的飽和流率s。因此,社會車輛在一個周期內(nèi)的延誤為排隊的車輛乘以其等待的時間(即由到達(dá)率、消散率和橫坐標(biāo)軸圍成圖形的面積)再乘上每輛社會車輛的平均乘客數(shù)。按照不同進口道不同轉(zhuǎn)向,總社會車輛延誤計算如公式(10)和(11)所示。
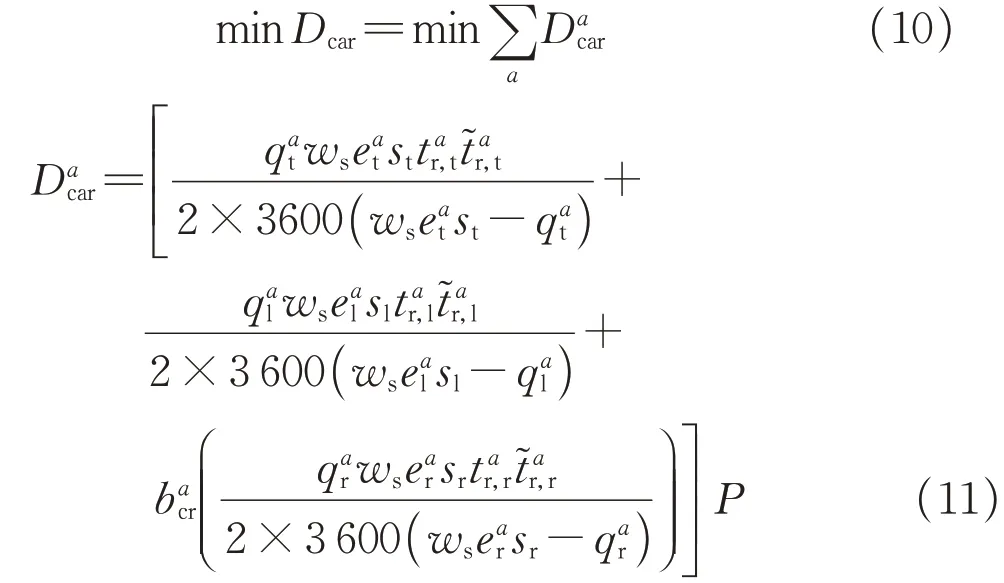
式中:Dcar為社會車輛總延誤;D acar為進口道a對應(yīng)的社會車輛延誤;qat、qal、qar分別為進口道a的直行、左轉(zhuǎn)、右轉(zhuǎn)社會車輛實時流量;ws為汽車飽和流率的天氣折減系數(shù);eat、eal、ear分別為進口道a的直行、左轉(zhuǎn)、右轉(zhuǎn)車道數(shù);st、sl、sr分別為一條直行、左轉(zhuǎn)、右轉(zhuǎn)專用道的飽和流率;tra,t、tra,l、tra,r分別為進口道a直行、左轉(zhuǎn)、右轉(zhuǎn)的優(yōu)化后紅燈時長;t~ra,t、t~ra,l、t~ra,r分別為進口道a直行、左轉(zhuǎn)、右轉(zhuǎn)的初始紅燈時長;bacr為進口道a右轉(zhuǎn)車輛是否受控,是則為1,否則為0;P為包含司機在內(nèi)的社會車輛平均載客數(shù)。
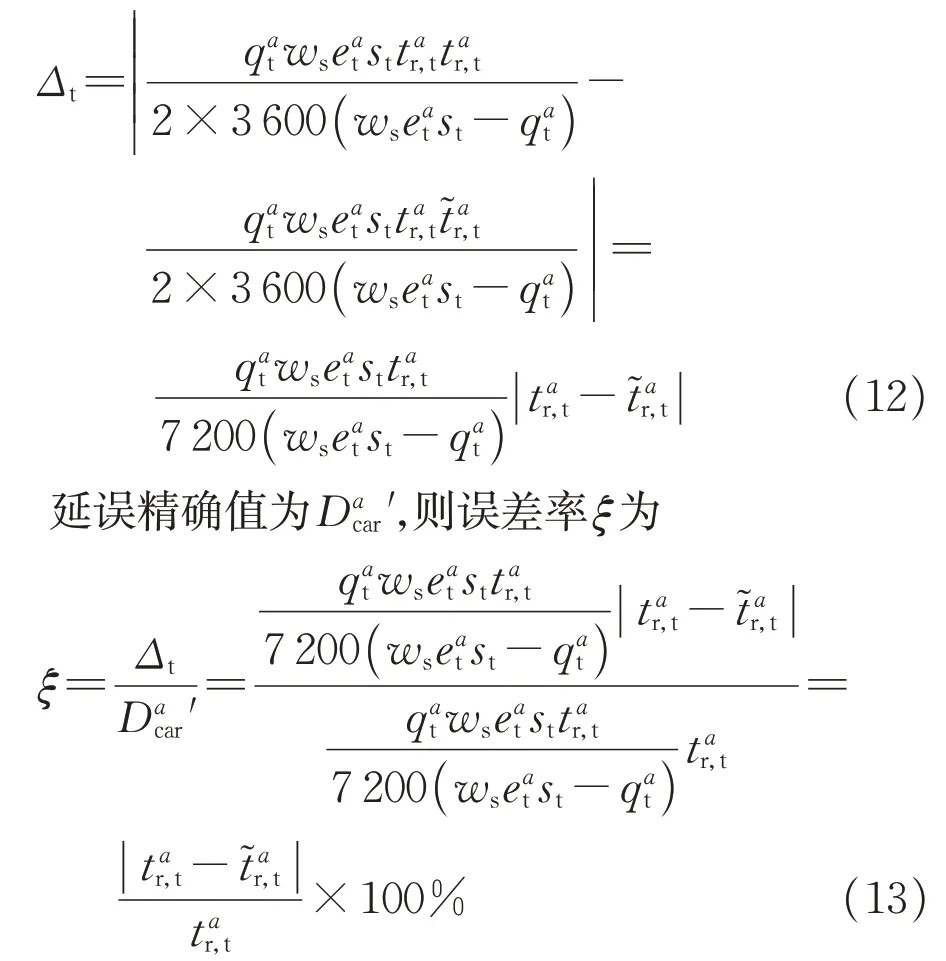
公式(11)中,分母中的3 600是因為其中一個與流量相乘的紅燈時長單位應(yīng)化為小時;三項的分子原本應(yīng)是優(yōu)化后紅燈時長的平方,為了便于求解將模型簡化為線性優(yōu)化,其中一個優(yōu)化后紅燈時長以初始紅燈時長這一參數(shù)代替。以直行車輛為例,計算社會車輛延誤的誤差為精確值與近似值的差異Δt,即
2.4.2 約束
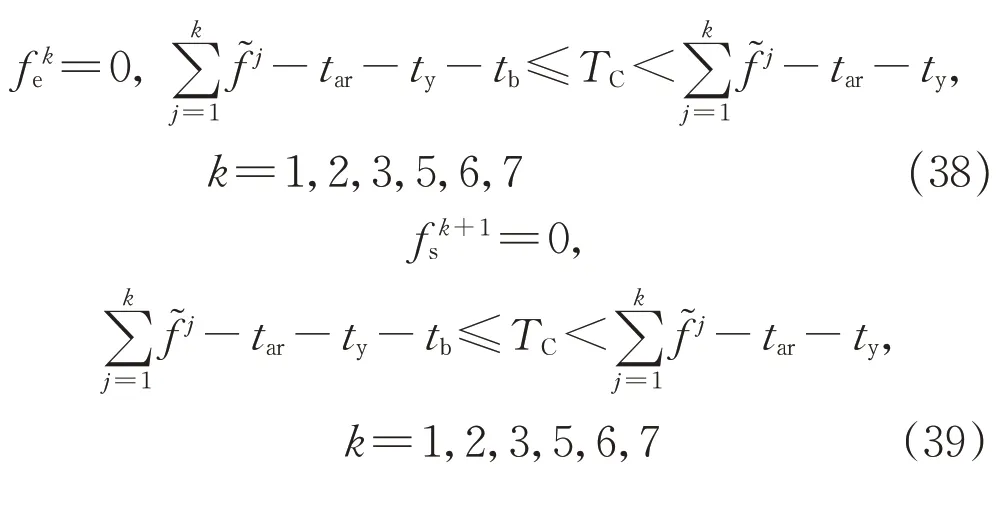
約束C1:公交所需的信號優(yōu)先約束。根據(jù)路口公交優(yōu)先申請生成算法計算得出的公交所需信號優(yōu)先時長,約束相位變化必須滿足公交所需綠燈早啟時長fsbus和綠燈延長時長febus,則有
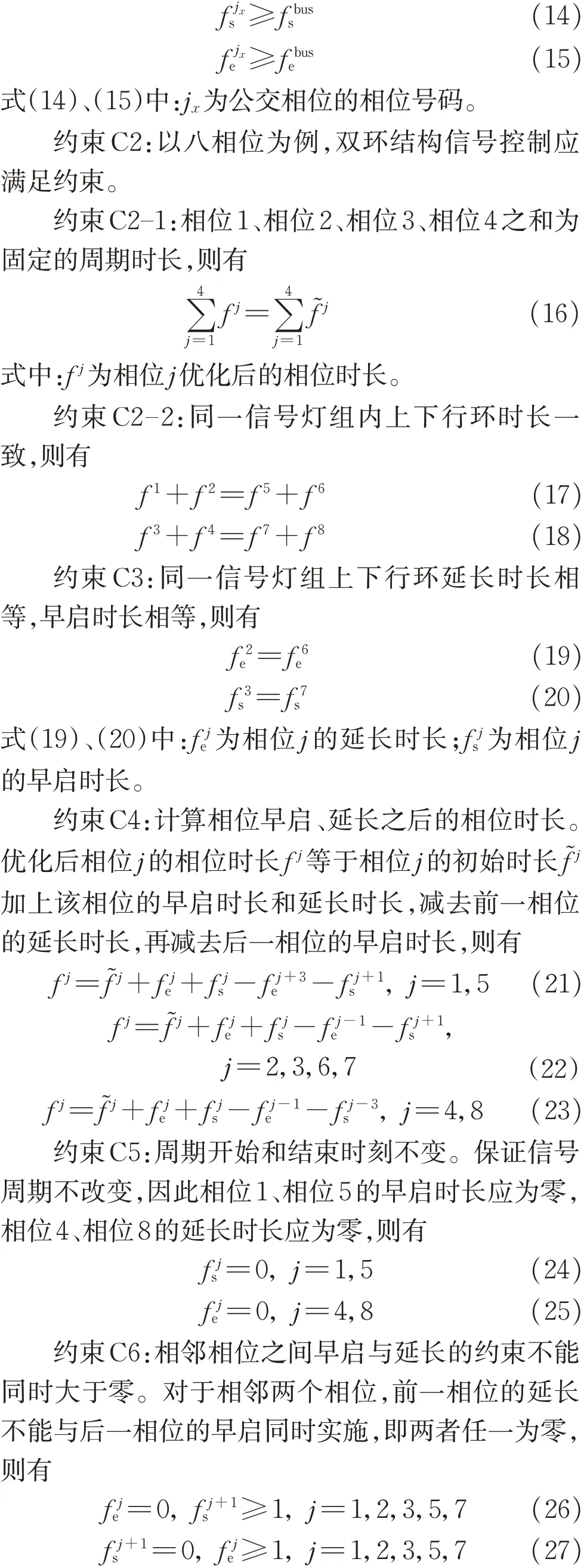
引入0-1變量φjs和φje對約束進行線性化處理,則有
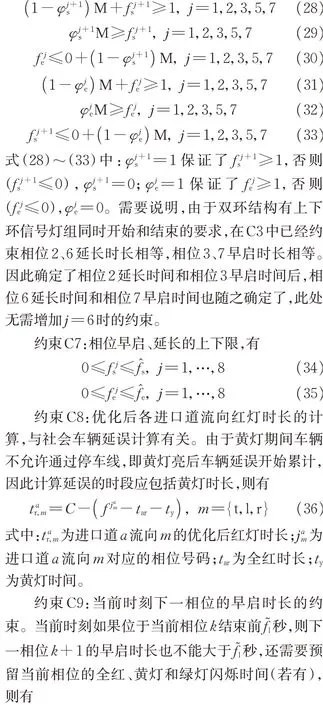
式中:tb為綠燈閃爍時間(無綠燈閃爍時tb=0)。條件判斷只涉及參數(shù),因此不需要線性化處理。
約束C10:當(dāng)前相位即將結(jié)束不能延長的約束。如果當(dāng)前時刻處在當(dāng)前相位k的末尾,已經(jīng)開始綠燈閃爍,則當(dāng)前相位k不允許延長,下一相位k+1不允許早啟,則有
3 案例分析
3.1 實驗設(shè)計
為了測試本文提出的模型效果,以鄭州南三環(huán)沿線5個路口(圖6a)為例進行驗證。在VISSIM上搭建仿真模型,根據(jù)實際流量(表1)標(biāo)定仿真路網(wǎng),如圖6b所示。公交發(fā)車間隔為300 s,只有在干線上行駛的公交申請優(yōu)先。當(dāng)公交到達(dá)交叉口范圍,激活路口公交優(yōu)先申請生成算法和考慮社會車輛的信號優(yōu)先優(yōu)化模型。為驗證本文方法對干線信號協(xié)調(diào)的配合效果,對比不優(yōu)化、僅協(xié)調(diào)控制(基于PMBAND模型[13])及本文方法(以PM-BAND模型[13]為背景信號協(xié)調(diào)方案)的效果,采用不同隨機種子運行10次。
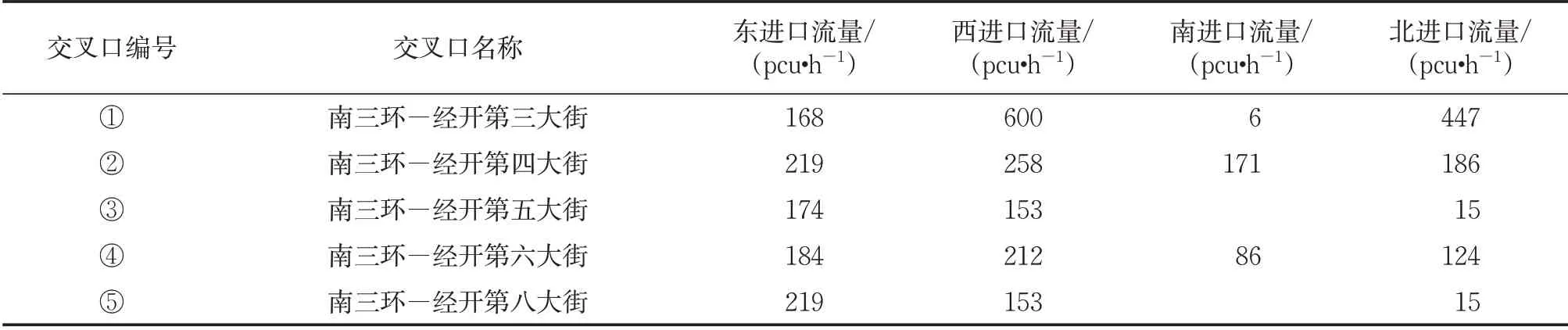
表1 仿真交叉口流量數(shù)據(jù)Tab.1 Intersection volume data in simulations

圖6 鄭州南三環(huán)沿線交叉口Fig.6 Intersections along the South Third Ring Road in Zhengzhou
進一步分析模型取得效果的內(nèi)在原因,分別對路段速度引導(dǎo)算法、路口公交優(yōu)先申請算法、考慮社會車輛的信號優(yōu)先優(yōu)化模型進行數(shù)值仿真測試。案例涉及一個十字交叉口的控制,公交在相位3通行,公交在路段上的最大和最小速度分別為40和10 km·h-1,加減速時的加速度為1.05 m·s-2。公交在進入路段時馬上激活算法開始進行速度引導(dǎo),此時距離交叉口停車線350 m,公交車速20 km·h-1。交叉口信號控制周期為190 s。上行環(huán)和下行環(huán)四相位對應(yīng)時長相同,從相位1至相位4時長分別為58、38、58、36 s。所有相位時間都包含位末尾的黃燈時間3 s,相位2、4、6、8還包含全紅時間3 s。
在上述案例設(shè)置基礎(chǔ)上進一步測試路口公交優(yōu)先申請生成算法。當(dāng)前公交恰好在停靠站完成服務(wù),距離停車線150 m,當(dāng)前車速0 km·h-1。根據(jù)公式(3)~(9)計算公交優(yōu)先相位的最大早啟時長和最大延長時長,計算得最大早啟時長和最大延長時長皆為10 s。在考慮社會車輛的信號優(yōu)先優(yōu)化模型測試中,為測試不同公交優(yōu)先申請策略的影響,選擇綠燈早啟、延長兩組需求場景進行測試。此外為了分析社會車輛流量的影響,確保交叉口不飽和情況下設(shè)置高中低3組流量參數(shù)(見表2),而中、低流量分別是對應(yīng)高流量數(shù)據(jù)的60%、30%。對比在不控制(執(zhí)行原有信號配時方案)、僅優(yōu)先(滿足公交優(yōu)先申請但不進行信號優(yōu)先優(yōu)化)、優(yōu)先且優(yōu)化(本文)3種情況下公交延誤和社會車輛延誤,并進一步分析高流量下不同交叉口范圍(50、100、150、200、250、300 m)對模型效果的影響,令公交在周期內(nèi)每一秒到達(dá)交叉口,對比社會車輛平均延誤、公交平均延誤和公交停車次數(shù)優(yōu)化前后降低率。
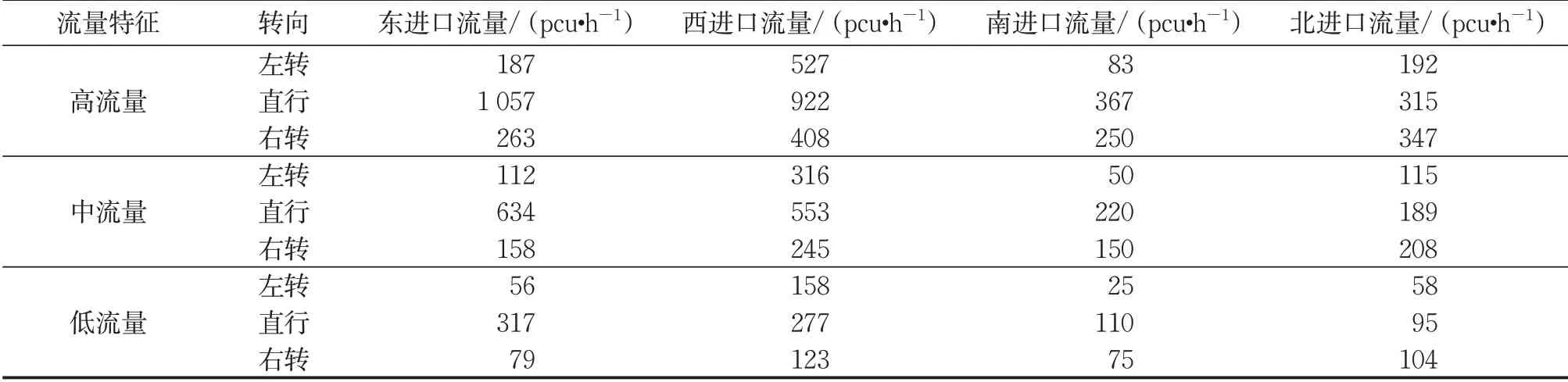
表2 交叉口流量數(shù)據(jù)Tab.2 Intersection volume data
3.2 仿真測試結(jié)果
如圖7所示,在本文提出的方法控制下干線上社會車輛平均延誤和公交平均延誤均最低,低于僅進行協(xié)調(diào)控制的情況;而僅進行協(xié)調(diào)控制優(yōu)于不優(yōu)化的情況。由此可見,在協(xié)調(diào)控制已經(jīng)能提升整體干線交通流運行效率的同時,本文提出的動態(tài)公交優(yōu)先控制方法還能進一步降低延誤(比不優(yōu)化降低公交平均延誤43%,比僅協(xié)調(diào)控制降低公交平均延誤15%),提升干線系統(tǒng)中公交車輛的運行效率。此外,本文方法下社會車輛延誤最低,這是因為本文提出的方法中包括了基于實時流量以社會車輛延誤最小為目標(biāo)的信號優(yōu)先優(yōu)化,因此同時兼顧了社會車輛行駛效益。
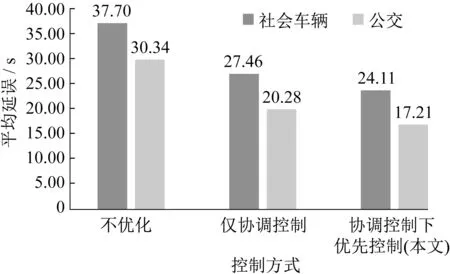
圖7 不同控制方法下公交與社會車輛平均延誤對比Fig.7 Comparison of average private vehicle delay and average bus delay in different control methods
3.3 路段速度引導(dǎo)算法效果
圖8 展示了速度引導(dǎo)下和無引導(dǎo)下公交在不同時刻從350 m位置出發(fā)行駛到停車線的軌跡。速度引導(dǎo)下,根據(jù)公交通行情況不同可以把一個周期劃分成4部分,分別是①公交在綠燈前的主動優(yōu)先期間通行、②公交在綠燈期間通行、③公交在綠燈后的主動優(yōu)先期間通行、④公交在紅燈期間到達(dá)等待。在時段①,公交在速度引導(dǎo)算法下降低行駛速度使得其能在綠燈早啟期間通過;在時段②、③,公交按允許最高速度行駛能不停車通過;在時段④,公交被引導(dǎo)以最快速度行駛,因為無法不停車通過,最快駛到路口排隊被認(rèn)為最有利。此外,在時段①,公交軌跡有相互重疊的現(xiàn)象,早出發(fā)的公交可能更晚到達(dá)停車線。因為車速引導(dǎo)值為整數(shù),距離較長導(dǎo)致改變一單位車速會對公交到達(dá)停車線時刻影響較大。引導(dǎo)車速恰好增加一單位的公交,可能比其早出發(fā)1 s的車輛(引導(dǎo)車速少一單位)早到。對比圖8a和圖8b,速度引導(dǎo)下公交的不停車率為比無引導(dǎo)下公交的不停車率因此,本文提出的路段速度引導(dǎo)算法可顯著提升公交的不停車率。
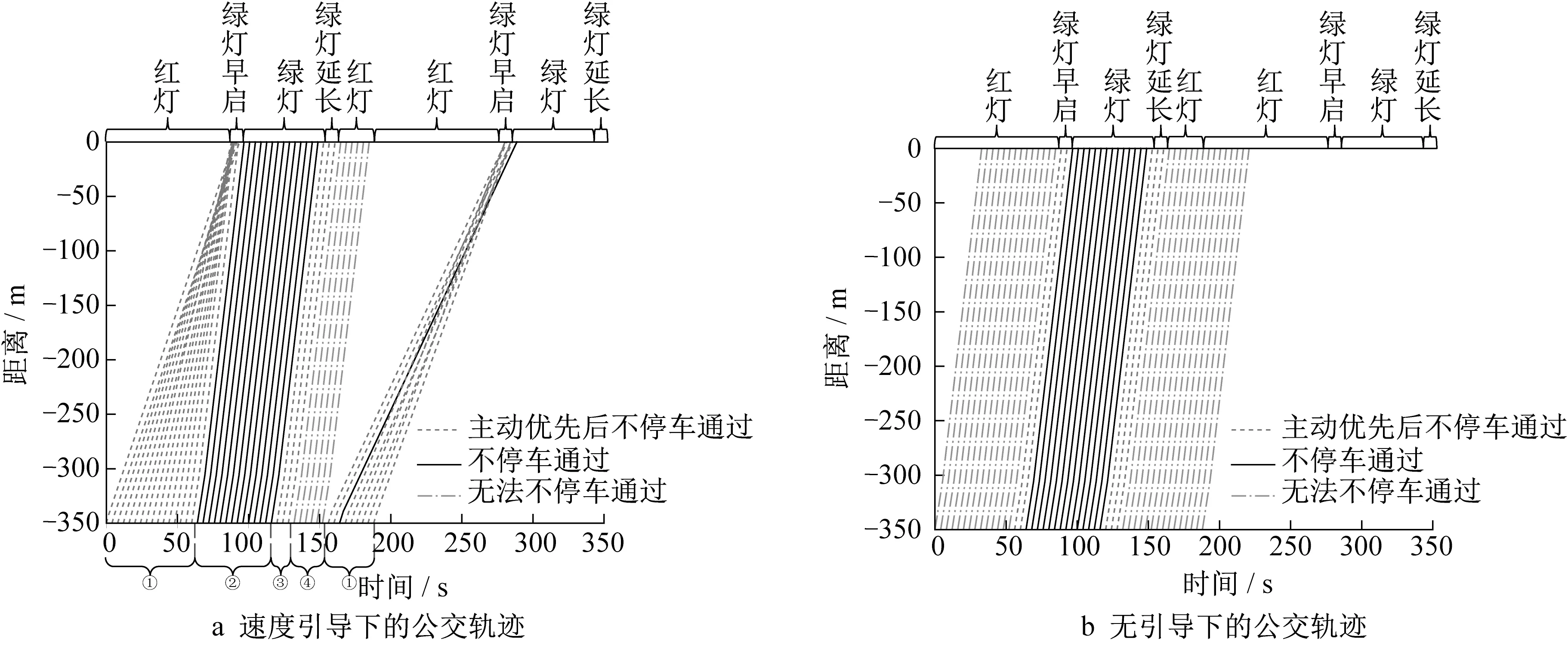
圖8 路段速度引導(dǎo)算法效果Fig.8 Effects of speed advisory algorithm
3.4 路口公交優(yōu)先申請生成算法效果
表3展示了在一周期內(nèi)10個關(guān)鍵觸發(fā)時刻的計算結(jié)果,證明了公交優(yōu)先申請算法能成功算出公交優(yōu)先申請需求和速度引導(dǎo)及駐站控制。表3展示了一周期內(nèi)不同階段的分界點。一周期可分成5個階段,其優(yōu)先效果分別是①無法不停車通過、②需駐站控制和綠燈早啟、③僅需綠燈早啟、④不需任何優(yōu)先、⑤僅需綠燈延長。這說明公交優(yōu)先申請算法能生成協(xié)同的車速引導(dǎo)、駐站控制和優(yōu)先申請策略,利用網(wǎng)聯(lián)技術(shù)實時下發(fā)指令優(yōu)勢,相比無法進行駐站控制的算法能提升公交享受優(yōu)先的時間范圍,實現(xiàn)不停車通過。
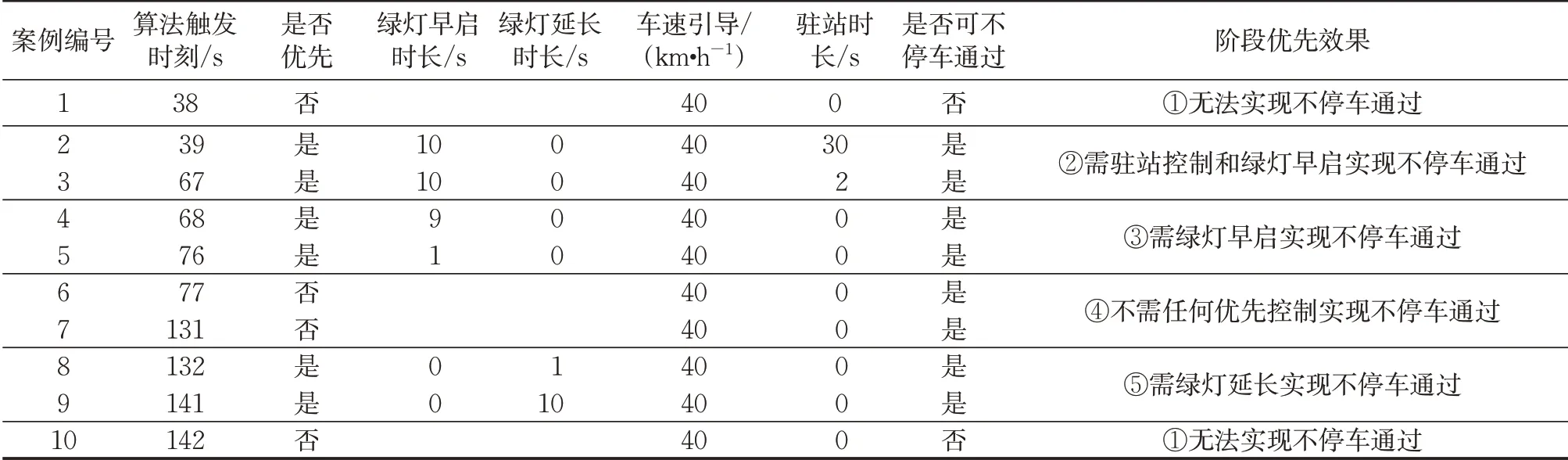
表3 路口公交優(yōu)先申請生成算法案例計算結(jié)果Tab.3 Results of bus priority request generation algorithm
3.5 考慮社會車輛的信號優(yōu)先優(yōu)化模型效果
圖9 為表3案例4、9在3種流量水平和不同控制方法下的社會車輛延誤。針對所有流量水平,社會車輛延誤在不控制情況下的延誤是最高的,進行了公交優(yōu)先和信號優(yōu)化后延誤最低,降幅約6%。僅優(yōu)先控制下延誤水平中等,但仍低于不控制的情況。因為公交優(yōu)先申請的相位是干線直行相位,流量較大,對公交相位進行主動優(yōu)先能提升該大流量相位的社會車輛通行效益,降低整體社會車輛延誤。而流量水平的變化僅對延誤的絕對值有影響,模型效果對流量不敏感。公交延誤方面,因3種流量水平下公交延誤一致,本文僅展示高流量情況下的公交延誤。如圖10所示,進行公交優(yōu)先能明顯降低公交延誤,但是否進行信號優(yōu)化對公交的影響不大。案例9在不控制情況下的公交延誤特別高,因為案例中公交只能在綠燈延長后才能不停車通過,而不控制時公交在紅燈初期到達(dá)導(dǎo)致公交需要等待較長的紅燈造成很長的延誤。
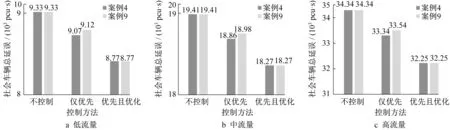
圖9 不同控制方法下社會車輛總延誤Fig.9 Private vehicle delays in different control methods
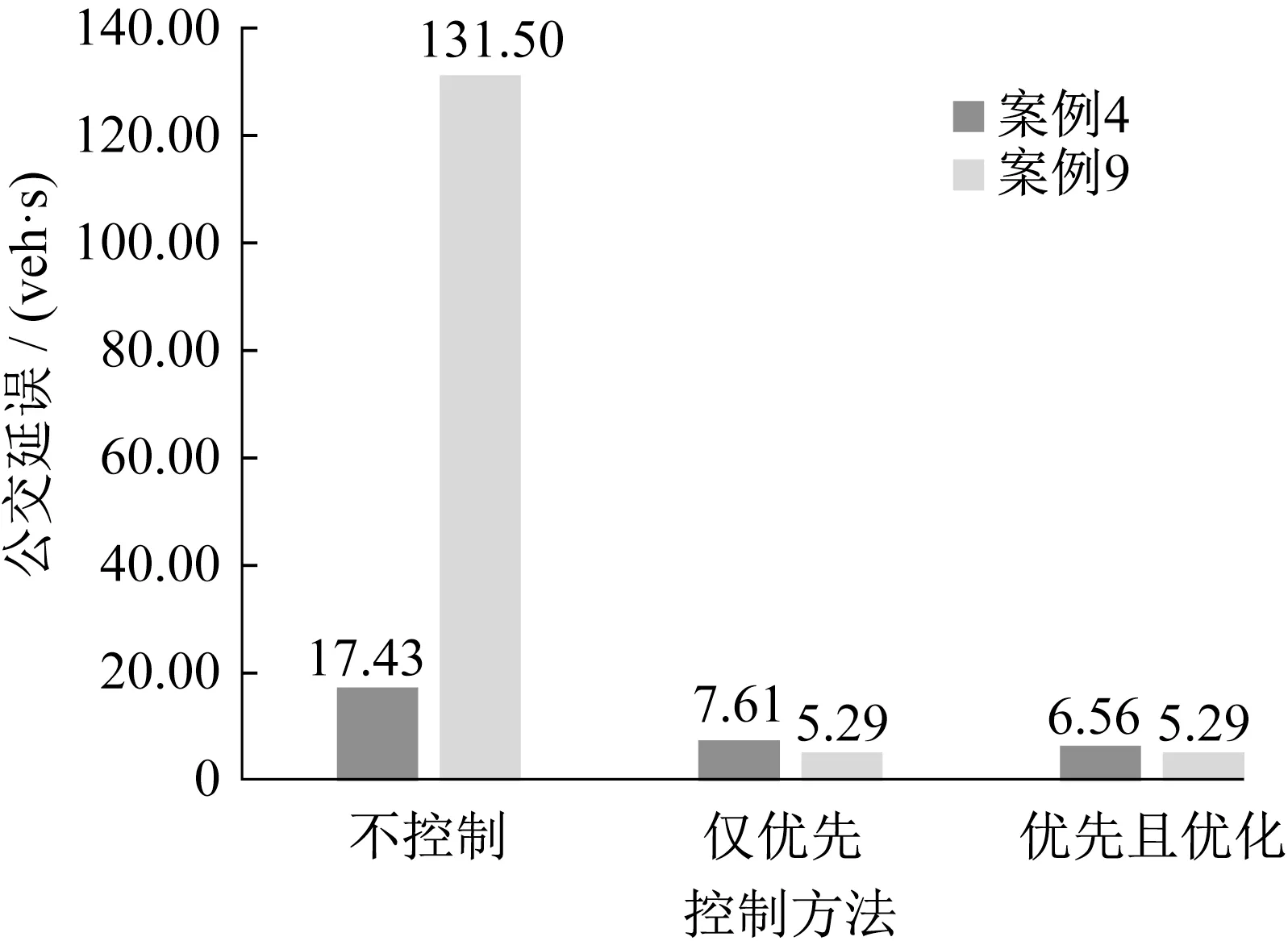
圖10 高流量不同控制方法下的公交延誤Fig.10 Bus delays of different control methods in a high volume scenario
圖11 為高流量情況下,不同交叉口范圍社會車輛和公交的延誤降低率以及公交停車次數(shù)降低率。其中降低率是指本文控制方法下延誤或停車次數(shù)比不控制情況下延誤或停車次數(shù)降低的百分比。隨著交叉口控制距離的增加,公交停車次數(shù)降低越來越顯著,公交延誤降低率也隨之增加,但上升速度在距離大于100 m后放緩。因為更長的控制距離給予了公交更大的控制空間,公交能通過速度引導(dǎo)更靈活地調(diào)整其到達(dá)停車線時刻從而實現(xiàn)不停車通過。但速度引導(dǎo)不能減少公交在到達(dá)停車線前的延誤,只能影響停車次數(shù),因此當(dāng)距離足夠大,交叉口控制距離增加帶來的延誤降低放緩。另一方面,模型降低的社會車輛延誤對交叉口控制距離不敏感。社會車輛延誤降低率緩慢增加是因為距離更長,更多場景下公交能享受公交優(yōu)先,而公交優(yōu)先申請了流量較大的干線直行相位使得社會車輛延誤略微降低。
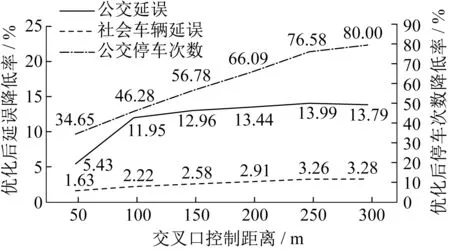
圖11 不同交叉口控制距離下延誤及公交停車次數(shù)Fig.11 Private vehicle delays and bus stop times in different intersection control distances
4 結(jié)語
本文提出了干線信號協(xié)調(diào)背景下的網(wǎng)聯(lián)公交實時優(yōu)先控制方法。與傳統(tǒng)研究不同,該方法配合已有的信號協(xié)調(diào),為公交提供一體化的速度引導(dǎo)、駐站控制、信號優(yōu)先服務(wù)。這一方法既能提升公交運行效益,又保證了社會車輛的行駛效益。案例分析驗證了本文方法的有效性。
本文提出的方法能保障已有干線協(xié)調(diào)的效益,優(yōu)于僅進行信號協(xié)調(diào)控制;本文提出的路段速度引導(dǎo)算法和路口公交優(yōu)先申請算法充分利用網(wǎng)聯(lián)技術(shù)的優(yōu)勢,使在更大時間范圍內(nèi)到達(dá)控制點的公交能享受優(yōu)先,提升公交不停車率;本文提出的考慮社會車輛的信號優(yōu)先優(yōu)化模型能在滿足公交通行需求的情況下保證社會車輛的通行效率;更大的交叉口范圍有利于降低公交延誤。
但本文未考慮交叉口多沖突優(yōu)先申請的處理,以及路段上多輛公交之間行駛軌跡的相互影響,也沒有考慮公交與社會車輛混行場景下的公交的運行特點。日后將把公交軌跡點規(guī)劃作為控制手段之一,并把多沖突優(yōu)先申請以及交叉口排隊對公交的影響考慮在內(nèi),提升控制方法的適用性。
作者貢獻聲明:
歐詩琪:建模,測試分析,論文撰寫。
俞春輝:論文修改。
馬萬經(jīng):提出想法,論文修改。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06