基于虛擬同步機控制的新能源發電并網系統小干擾穩定臨界短路比
2022-03-18 04:54:54康思偉董文凱郭詩然孫紅軍謝小榮
電力建設 2022年3期
康思偉,董文凱,郭詩然,孫紅軍,謝小榮
(1.中海油融風能源有限公司,上海市 200335;2.電力系統及發電設備控制與仿真國家重點實驗室(清華大學電機系),北京市 100084)
0 引 言
目前,基于矢量控制的電壓源型換流器(voltage source converter,VSC)在新能源發電領域具有廣泛應用,其在為新能源發電提供快速靈活并網控制的同時,也造成電力系統中旋轉慣量的降低,且難以在弱電網條件下保持良好的穩定性。為應對傳統VSC不具備旋轉慣量、無法有效為交流系統提供頻率和電壓支撐的問題[1-3],2007年,德國勞斯克塔爾工業大學Beck教授率先提出虛擬同步機(virtual synchronous generator,VSG)的概念,即將同步發電機動態方程引入換流器控制[1-6],使其可以模擬同步機的慣性和阻尼等輸出特性,具備為交流系統提供頻率和電壓支撐的能力。這一提法隨后在全球范圍內得到廣泛關注與認可。
除為交流系統提供頻率和電壓支撐外,近年來的研究表明,電壓控制型VSG可在弱電網甚至是極弱電網的條件下,保持良好的小干擾穩定特性[4-13]。文獻[4-5]針對基于VSG的雙饋風機并網系統,通過模式分析發現,在弱電網甚至是極弱電網的條件下,VSG的振蕩模式仍具有較好的阻尼特性,系統具備在小干擾作用下保持良好運行穩定性的能力。文獻[6-13]基于阻抗模型,分析了VSG換流器并網系統在弱電網與極弱電網條件下的小干擾穩定性,發現在短路比(short circuit ratio,SCR)不斷減小,甚至是接近于1的情況下,阻抗矩陣特征值的奈奎斯特曲線仍與(-1,0)之間保持一定距離,即系統仍具有一定的穩定裕度[6-13]。考慮到對于傳統VSC并網系統,大量理論研究與工程實踐都表明,系統在弱電網或極弱電網的條件下容易出現小干擾穩定性問題[14-18],因此,VSG可能成為應對弱電網條件下電能變換需求的有效解決方案。
但是,文獻[19-20]進一步指出VSG更適合在弱電網條件下運行,反而不適合強電網。文獻[21-22]基于線性化狀態空間模型,分析了VSG換流器并網系統小干擾穩定性,發現隨交流電網強度提高,VSG振蕩模式在復平面上向右移動,造成系統小干擾穩定性降低。文獻[23]基于阻抗模型,分析了VSG經串補線路并網系統的小干擾穩定性,發現隨串補度提高,系統穩定性降低。在此,需要補充說明的是,當前VSG可分為電壓控制型和電流控制型兩類,對弱電網條件的良好適應性是針對電壓控制型VSG而言[8],文獻[21-23]中的結論也是基于僅具有電壓控制環的VSG并網系統獲得的。在以上研究的基礎上,為有效保障系統穩定性、充分發揮此類VSG對弱電網的良好適應性與為交流系統提供頻率和電壓支撐的能力,本文進一步探討與明確考慮不同電網強度影響的VSG并網系統小干擾穩定性判定方法以及系統臨界穩定條件,為未來VSG并網系統規劃提供參考和借鑒。
為此,本文首先建立VSG并網系統小信號模型,并將其整理為兩輸入兩輸出單位負反饋系統的表示形式。然后,基于廣義奈奎斯特判據,提出一種考慮不同電網強度的VSG并網系統小干擾穩定性判定方法,定義系統小干擾穩定臨界短路比(critical short circuit ratio,CSCR)。最后通過仿真算例,驗證所提方法的有效性。
1 虛擬同步機并網系統小信號模型
VSG并網系統示意如圖1所示。其中,VSG的動態可描述為[8]:
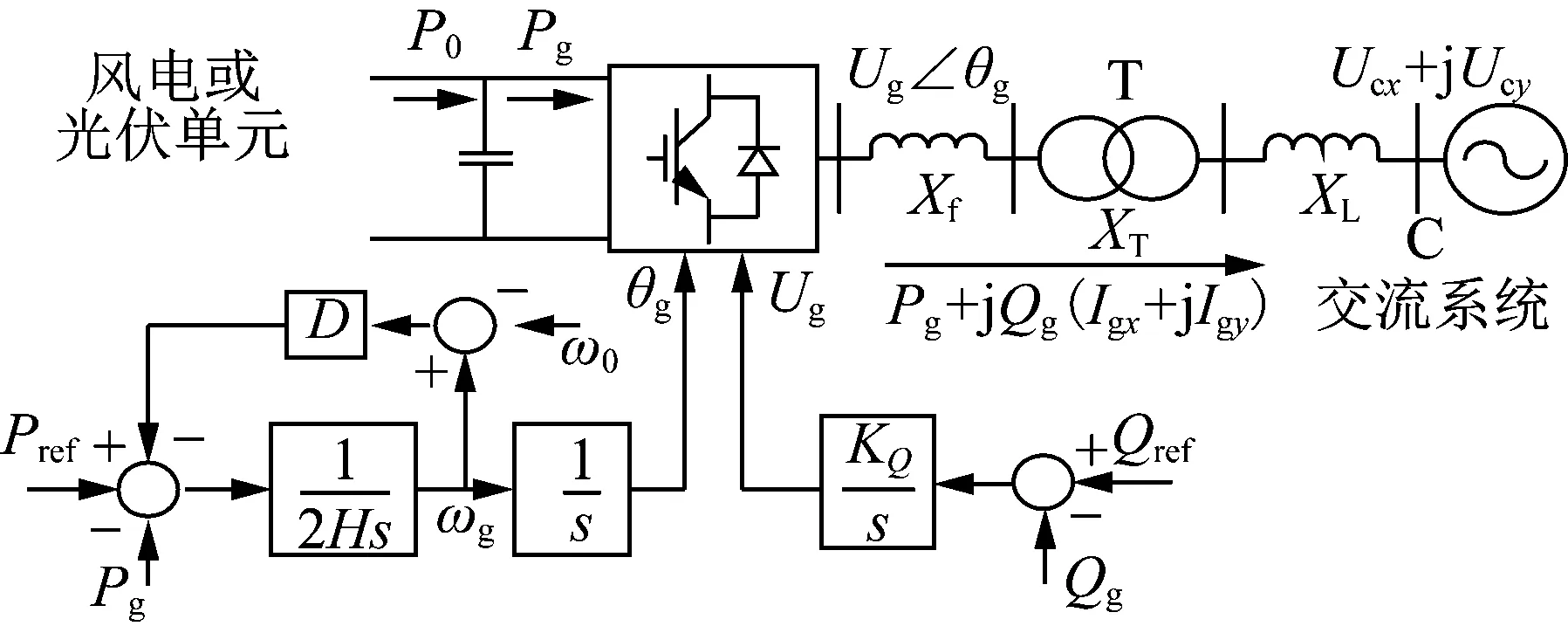
圖1 VSG并網系統示意圖Fig.1 A grid-connected VSG system
(1)
(2)
式中:ωg為VSG虛擬角頻率;ω0為系統額定角頻率;Ug、θg分別為VSG輸出電壓幅值和相角;H、D、KQ分別為VSG慣性常數、阻尼系數和無功控制器增益系數;Pref、Qref分別為VSG輸出有功和無功的參考值;Pg、Qg為VSG輸出有功和無功功率;Ugx、Ugy為交流電網公共x-y坐標系下VSG端x軸和y軸電壓。
Pg+jQg=(Ugx+jUgy)(Igx-jIgy)
(3)
式中:Igx、Igy表示交流電網公共x-y坐標系下VSG端x軸和y軸的輸出電流。
將式(1)—(3)線性化并寫為狀態空間的表示形式:
(4)
式中:ΔXg=[ΔωgΔθgΔUg]T;ΔIg=[ΔIgxΔIgy]T;ΔUg=[ΔUgxΔUgy]T;Ag=
圖1中:Xf為濾波器電抗;XT為升壓變壓器電抗;XL為連接線路電抗。令XE=Xf+XT+XL表示VSG與交流系統間連接系統總電抗,則有
(5)
式中:Ucx、Ucy表示交流電網公共x-y坐標系下,圖1中母線C的電壓。
將式(5)線性化并寫為狀態空間的表示形式:
(6)

由式(4)和式(6),可得圖1所示VSG并網系統的線性化狀態空間模型:
(7)

由式(4)可得VSG小信號傳遞函數模型為:
ΔUg=G(s)ΔIg
(8)
式中:G(s)=Cg(sI3-Ag)-1Bg,I3為3×3單位矩陣。
將式(6)寫為傳遞函數的形式:
(9)
式中:H(s)=(sI2-AL)-1BL,I2為2×2單位矩陣。
由式(8)和式(9)可知,圖1所示的VSG并網系統小信號模型可表示為圖2所示的形式;VSG并網系統的小信號傳遞函數模型如式(10)所示。
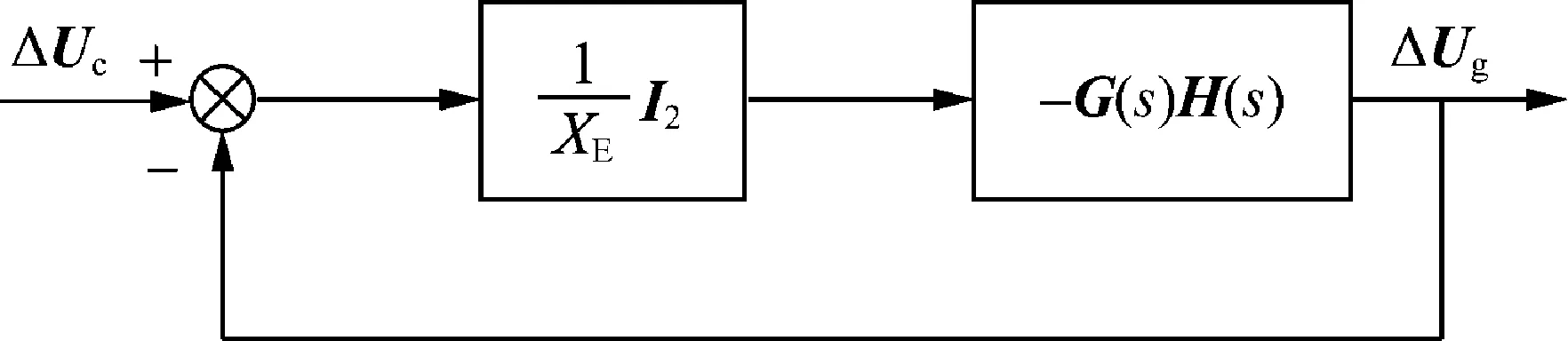
圖2 VSG并網系統小信號模型Fig.2 Small-signal model of a grid-connected VSG system
ΔUg=N(s)ΔUc
(10)

2 基于廣義奈奎斯特判據的虛擬同步機并網系統小干擾穩定臨界短路比
第1節給出了VSG并網系統小信號模型,本節將在此基礎上探討考慮不同電網強度影響的系統小干擾穩定性判定方法與臨界穩定條件。
2.1 虛擬同步機并網系統短路比的定義
交流電網強度通常采用VSG并網點的短路比衡量,具體到圖1所示系統,根據文獻[24],其短路比σSCR可表示為:
(11)
式中:S表示VSG額定容量標幺值。SCR越小,交流電網強度越弱,SCR的取值為2~3時,為弱電網;SCR小于2時,為極弱電網[16-17]。在此需要作進一步說明的是,對于僅具有電壓控制環的VSG而言,可將VSG端口濾波電抗看作連接系統的一部分,并將其計入系統SCR中[24];而對于具有矢量電流控制環節的并網換流器而言,濾波電抗應作為換流器的一部分而不能考慮到短路比當中。
2.2 不同電網強度下VSG并網系統小干擾穩定性判定方法

將回率矩陣F(s)的特征值記為R1(s)和R2(s),根據廣義奈奎斯特判據,若系統開環穩定,則可由R1(s)和R2(s)的奈奎斯特曲線是否逆時針包圍(-1,0)判斷圖2所示系統的穩定性[25],具體說明如圖3所示。
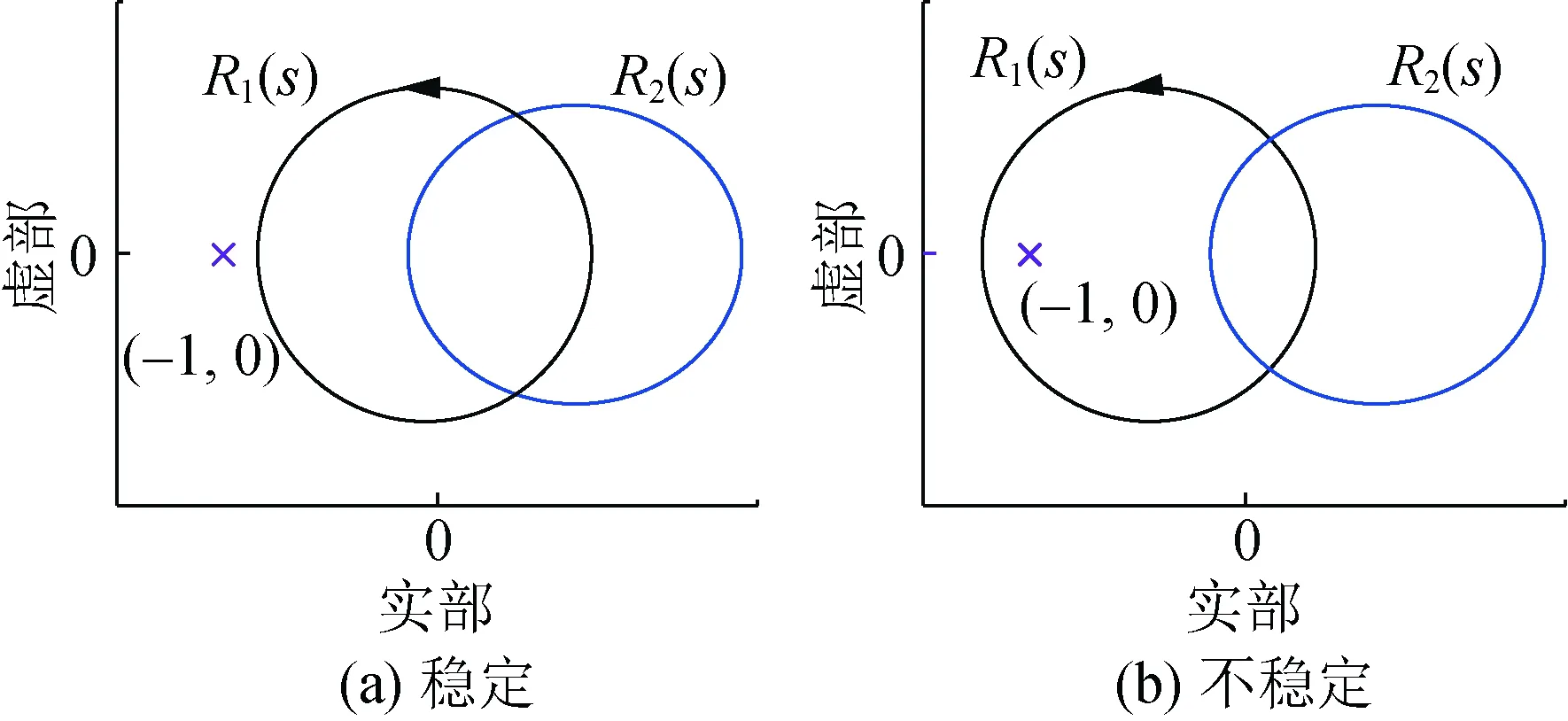
圖3 回率矩陣特征值的奈奎斯特曲線Fig.3 Nyquist plots of eigenvalues of return ratio matrix
若矩陣-G(s)H(s)的特征值為λ1(s)和λ2(s),則有λ1(s)=XER1(s)和λ2(s)=XER2(s)。因此,也可根據λ1(s)和λ2(s)的奈奎斯特曲線是否逆時針包圍(-XE,0)來判斷圖2所示系統的穩定性,具體說明如圖4所示。
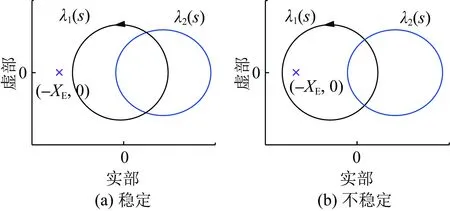
圖4 矩陣-G(s)H(s)特征值的奈奎斯特曲線1Fig.4 Nyquist plot 1 of eigenvalues of -G(s)H(s)
為便于說明問題,圖4給出的奈奎斯特曲線的形式較為簡單,實際上,還可能出現λ1(s)和λ2(s)的奈奎斯特曲線順時針包圍(-XE,0)的情況,此時應考慮與順時針包圍的曲線抵消后,(-XE,0)是否會被λ1(s)和λ2(s)的奈奎斯特曲線“凈”逆時針包圍[25],來判斷系統穩定性。具體說明如圖5所示,圖5(a)中,(-XE,0)被順時針和逆時針包圍的圈數均為1,凈逆時針包圍圈數為0,系統穩定;圖5(b)中,凈逆時針包圍圈數為1,系統失穩。
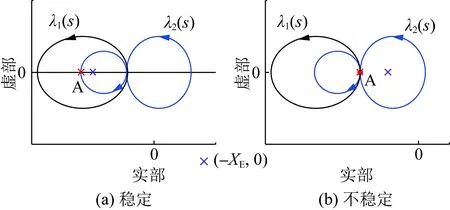
圖5 矩陣-G(s)H(s)特征值的奈奎斯特曲線2Fig.5 Nyquist plot 2 of eigenvalues of -G(s)H(s)
若定義奈奎斯特曲線由上向下穿過實軸為“正穿越”,且與實軸的交點為“正穿越點”,由下向上穿過實軸為負穿越,與實軸的交點為“負穿越點”,顯然,正穿越對應逆時針閉合曲線的開始或順時針閉合曲線的結束,負穿越恰好與之相反。若某一穿越點及其左側所有穿越點中,正穿越點數多于負穿越點數,則該穿越點可稱為“凈正穿越點”。由此:
1)若實軸上(-XE,0)左側存在穿越點,且左側距(-XE,0)最近的穿越點為凈正穿越點,則(-XE,0)被奈奎斯特曲線逆時針包圍,系統失穩;
2)若有穿越點與(-XE,0)重合,則系統臨界穩定;
3)若上述情況1)和2)均未出現,則系統穩定。
以圖5為例,圖5(a)中A點及其左側有一個負穿越點和一個正穿越點,A點非凈正穿越點,系統穩定;圖5(b)中,A點及其左側有3個正穿越點和2個負穿越點,A點為凈正穿越點,系統失穩(藍色曲線在A點處有2次正穿越、黑色曲線有1次負穿越,此處應記為2個正穿越點和1個負穿越點)。
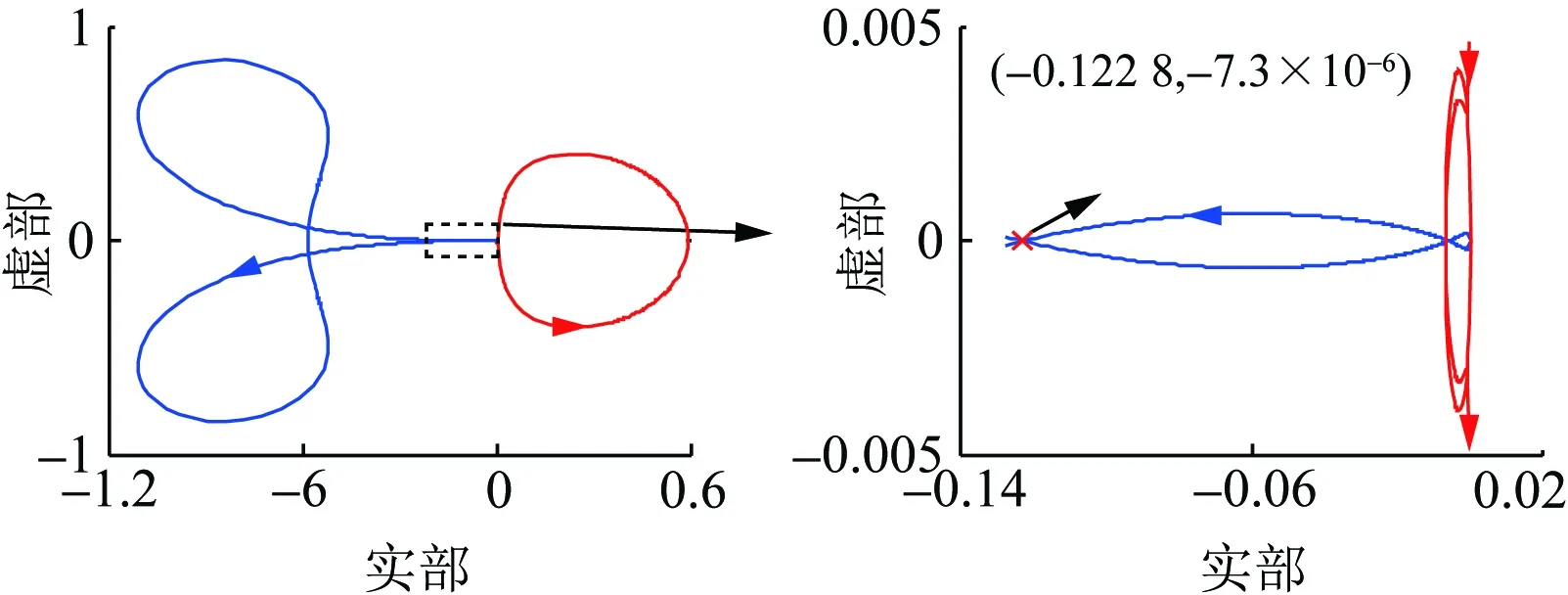
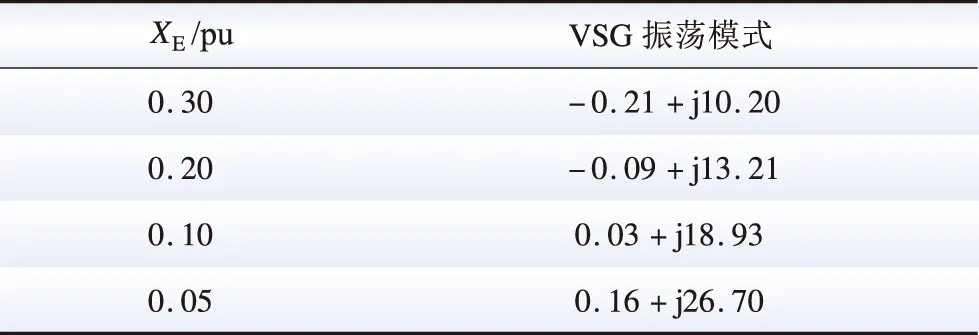
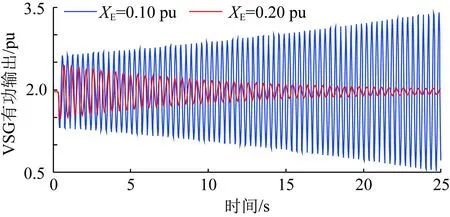
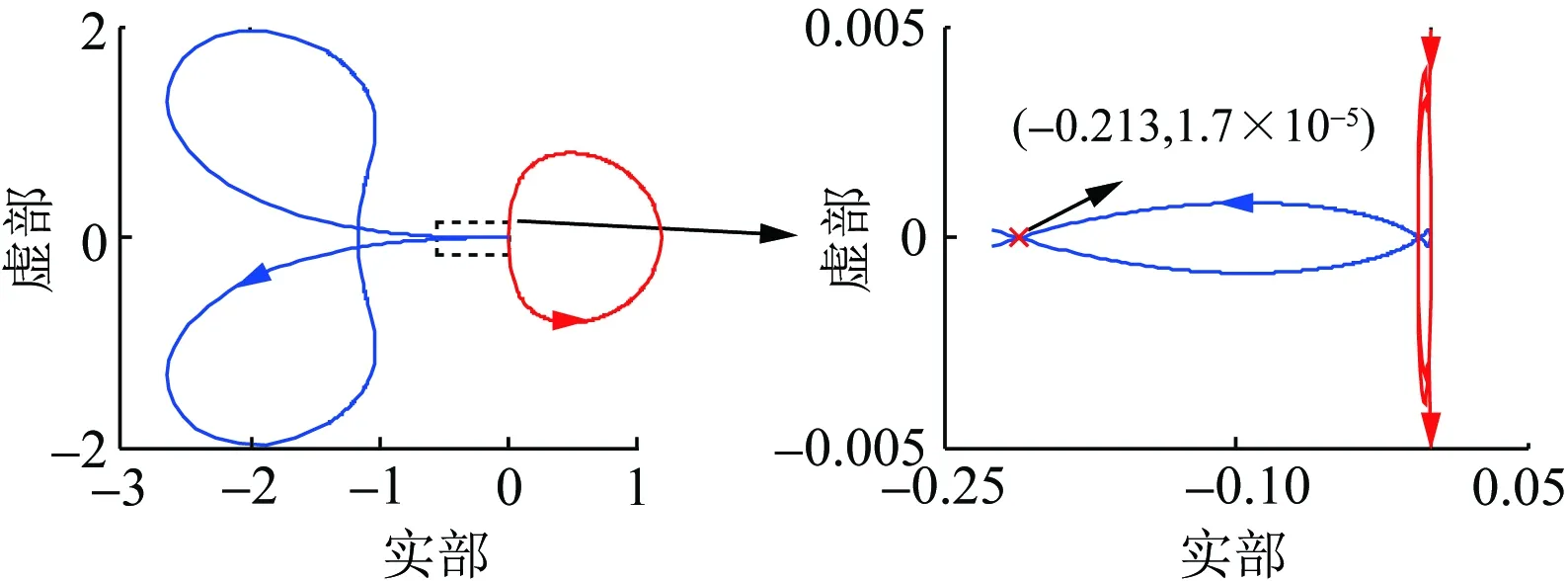
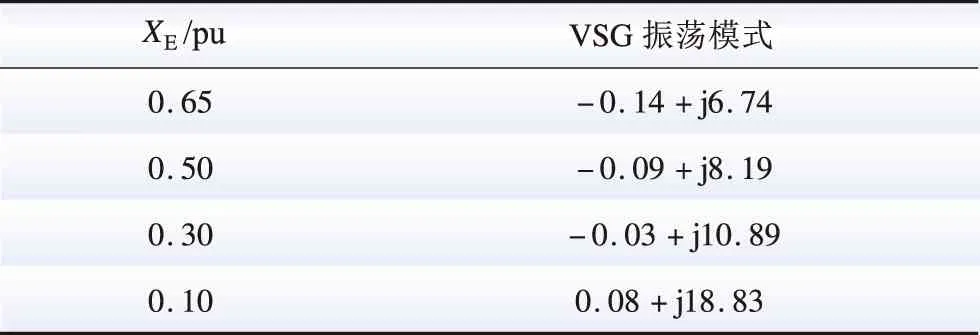
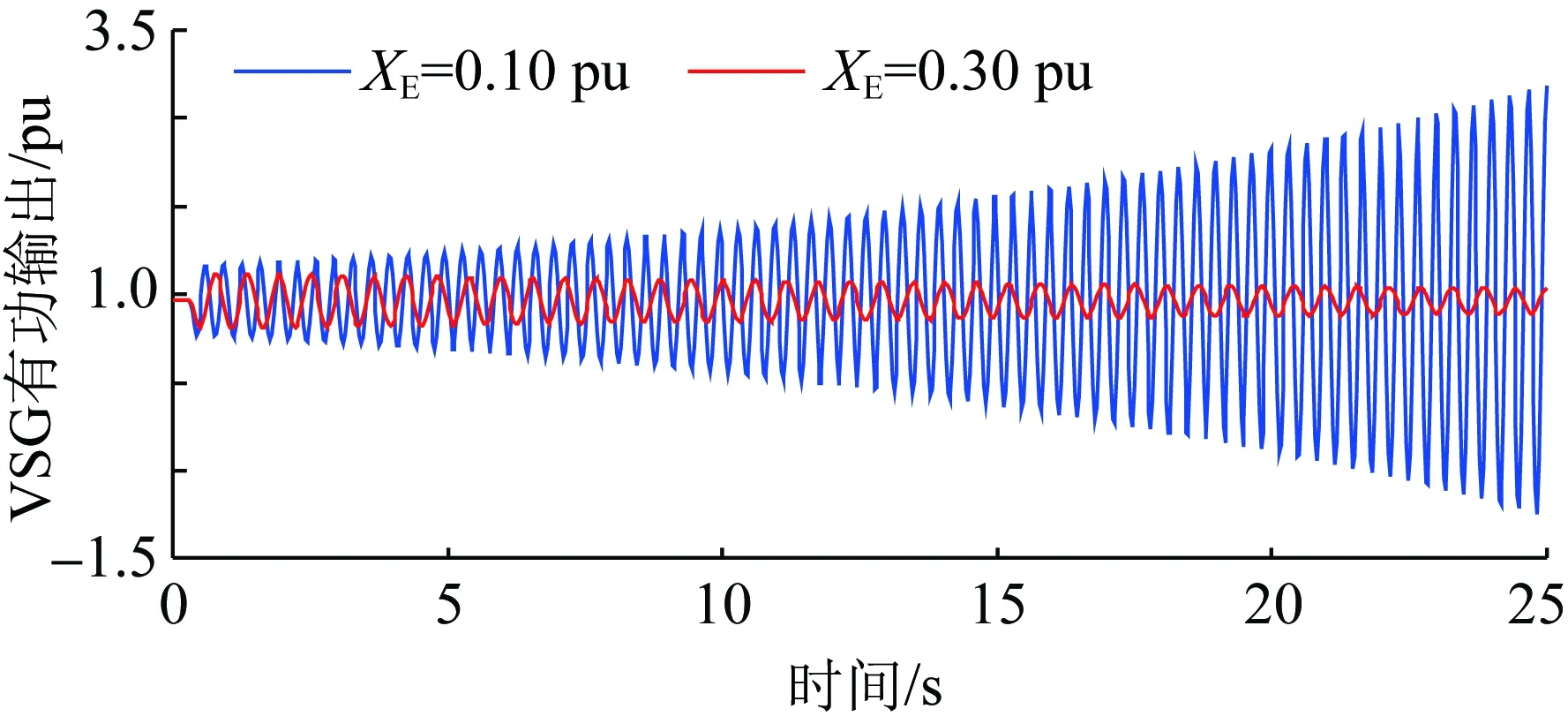
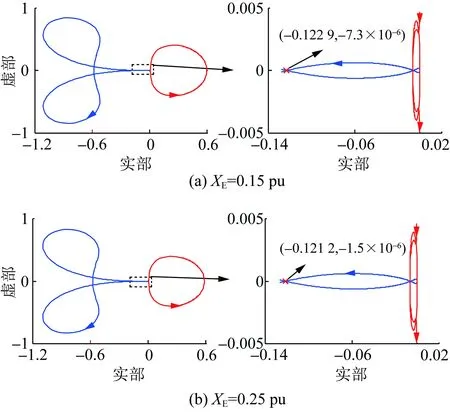
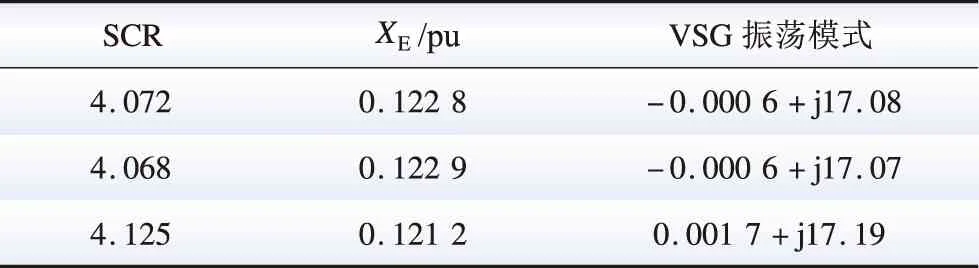
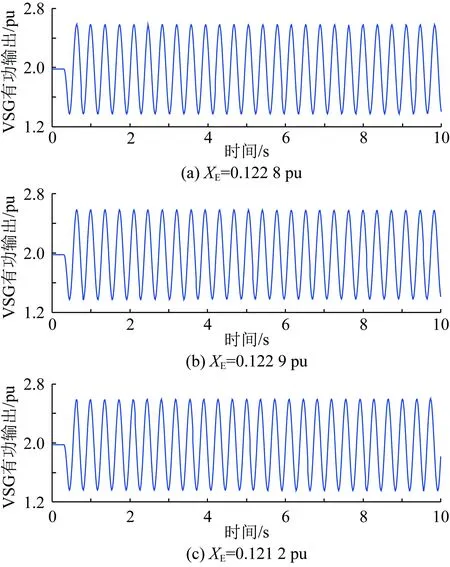
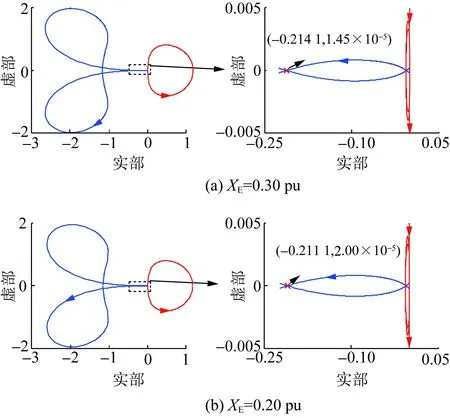
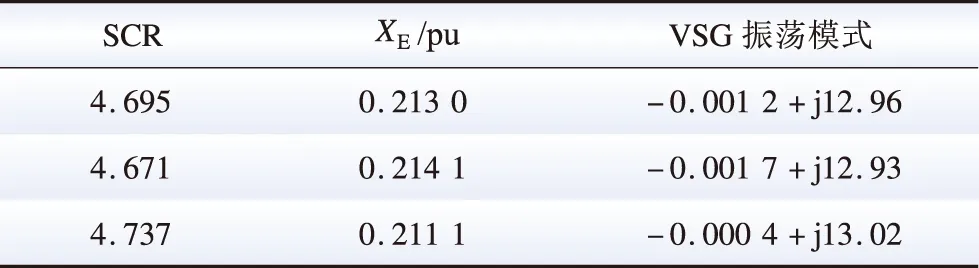
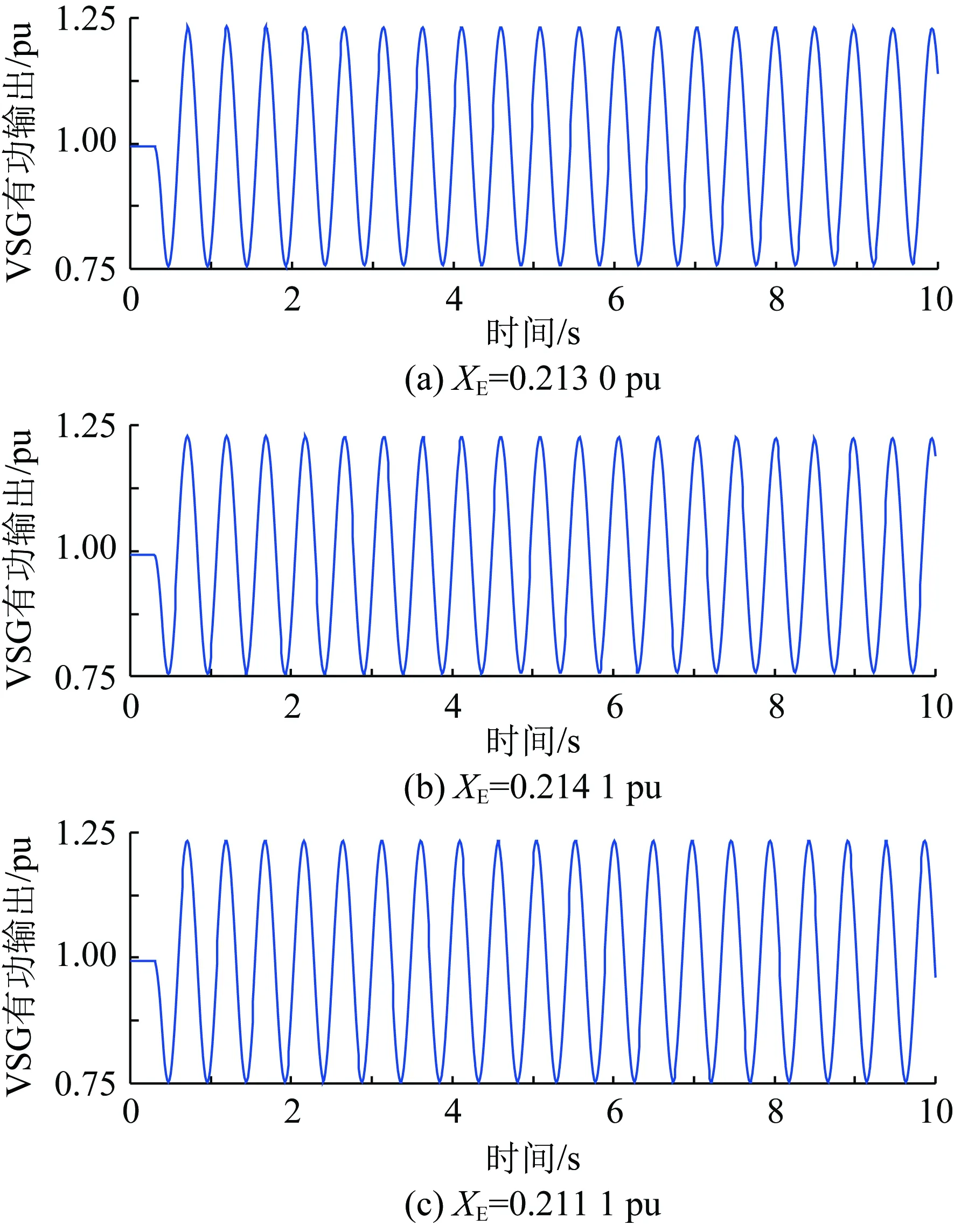
由式(4)、式(6)、式(8)和式(9),對于一給定的VSG,G(s)和H(s)的表達式與XE無關,即λ1(s)和λ2(s)奈奎斯特曲線的繪制結果基本不受XE變化的影響。在XE變化的過程中,(-XE,0)沿實軸移動,其左側實軸被λ1(s)和λ2(s)奈奎斯特曲線穿越的情況可能也會相對發生變化,從而造成系統穩定性的變化。結合此前的分析,沿實軸由左向右,一個凈正穿越點Ai(ai,0)和此后與其相鄰的非凈正穿越點Bi(bi,0)之間構成一個失穩區間φi={(x,0)|ai 圖6 XE減小造成VSG并網系統穩定性變化圖示說明Fig.6 Illustration on the stability variation of the grid-connected VSG system due to the decrease of XE 綜上,可獲得一種判定給定VSG在不同電網強度下構成并網系統小干擾穩定性的方法如下: 1)根據式(4)、式(5)、式(8)和式(9),建立傳遞函數矩陣G(s)和H(s),并繪制矩陣-G(s)H(s)特征值的奈奎斯特曲線; 2)根據奈奎斯特曲線對實軸負半軸的穿越情況,確定ξ上的失穩區間φ1i(i=1,2,…,m1,m1為區間ξ內失穩區間的個數); 3)當(-XE,0)∈φ1i時,系統失穩;當(-XE,0)與區間ξ內的穿越點重合時,系統臨界穩定。 采用以上方法,對于一個VSG,在給定運行狀態下,僅需一次繪制系統的奈奎斯特曲線,便可獲得使VSG并網系統小干擾失穩的XE的取值區間。在未來,VSG生產廠家可考慮選擇幾種典型運行狀態,給出圖6所示的VSG并網系統奈奎斯特曲線及失穩區間,這一信息對于VSG并網系統設備選擇和規劃具有很好的借鑒和指導意義。 考慮到現有研究表明,對于圖1所示的電壓控制型VSG,其更適合于弱電網條件,反而不適合強電網[19-22]。文獻[21]和[22]中進一步表明,隨XE減小,VSG振蕩模式在復平面上向右移動,系統小干擾穩定性降低。XE=0 pu時VSG并網系統小干擾穩定性推導見附錄A,根據附錄A中的推導,當XE=0 pu時,系統小干擾失穩,即VSG直接接入無窮大電網時失穩,對此,文獻[8]和[23]基于阻抗模型,得到相同的結論。因此,通常來講,應存在一個臨界電網強度或臨界SCR,在系統實際SCR超過該臨界SCR時,系統小干擾失穩。 與上述分析對應,在區間ξ內存在一個凈正穿越點A(a,0),A點與原點之間構成一個失穩區間,在XE減小的過程中,(-XE,0)沿實軸向原點移動,不斷靠近A點,系統小干擾穩定裕度降低,(-XE,0)與A點重合時,系統臨界穩定,(-XE,0)移動至A點右側時,系統小干擾失穩。據此,可獲得VSG并網系統小干擾穩定臨界短路比的定義與確定方法如下: 令VSG處于額定運行狀態,根據式(4)、式(5)、式(8)和式(9),建立矩陣-G(s)H(s),并繪制其特征值的奈奎斯特曲線,得到區間ξ內的凈正穿越點A(a,0);對應的VSG并網系統小干擾穩定臨界短路比(critical short circuit ration considering small-signal stability,CSCR_S)σCSCR_S為: (12) 在VSG處于額定運行狀態時,為確保VSG并網系統的小干擾穩定性,系統實際SCR應小于式(12)給出的CSCR_S,對此應在VSG并網系統規劃階段重點考慮。 從本節的分析可以看出,隨著電網強度的提升(或SCR的增大),VSG并網系統小干擾穩定性降低,當實際SCR大小超過所得CSCR_S時,系統失穩。對于VSG控制的原理和模型,本文主要以圖1和式(1)、(2)所示的核心部分為例進行介紹;理論上講,VSG中應引入類似于傳統同步機中的調差環節,但是此時VSG的小信號模型仍能表示為式(4)所示形式,因此,本節所提CSCR_S的求解方法,在考慮VSG控制中的調差等更為細節的環節時依然適用。此外,VSG參數不同,其并網系統的CSCR_S的大小也不相同。由于VSG并網系統數學模型的復雜性,對于控制參數和調差環節對系統小干擾穩定性的影響,當前尚無法通過類似于圖2所示形式直觀地反映出來,須對具體案例進行具體分析。本文主要針對給定VSG的小干擾穩定臨界短路比的求解,對于控制參數、運行點和調差環節等部分對系統CSCR_S的影響機理和規律,則還須進一步研究,本文不做討論。 本節采用圖1所示系統,驗證第2節所提小干擾穩定性判定方法和CSCR_S的有效性,VSG參數為:D=0.6、H=5、KQ=0.4,仿真軟件采用Matlab。 本節分別在VSG穩態功率輸出S0為2.0 pu和1.0 pu(功率因數均為0.98)的情況下,分析XE變化時VSG并網系統的小干擾穩定性,驗證2.2節所提小干擾穩定性判定方法的有效性。 對于S0=2.0 pu的情況,(-XE,0)可能的運動區間為ξ={(x,0)|-0.5 圖7 S0=2.0 pu時的奈奎斯特曲線(算例1)Fig.7 Nyquist plots when S0=2.0 pu (case 1) 然后,在XE由0.30 pu減小至0.05 pu的過程中,建立式(7)所示VSG并網系統線性化狀態空間模型,并計算矩陣A的特征值,得到VSG振蕩模式如表1所示。由表1可以看出,隨著XE的減小,振蕩模式阻尼減小。當XE<0.122 8 pu時,系統小干擾失穩。 表1 S0=2.0 pu時VSG振蕩模式計算結果(算例1)Table 1 Computational results of oscillation modes of the VSG when S0=2.0 pu (case 1) 最后,對算例系統小干擾穩定性進行非線性仿真分析。仿真中的擾動設置為:0.2 s時,輸入VSG的有功功率P0降低20%,并于0.1 s內恢復。仿真結果如圖8所示,可以看出,XE=0.20 pu時,系統穩定,XE=0.10 pu時,系統失穩,與此前基于線性化模型所得結論一致。 圖8 S0=2.0 pu時非線性仿真結果(算例1)Fig.8 Non-linear simulation results when S0=2.0 pu (case 1) 對于S0=1.0 pu的情況,(-XE,0)的運動區間為ξ={(x,0)|-1 圖9 S0=1.0 pu時的奈奎斯特曲線(算例1)Fig.9 Nyquist plots when S0=1.0 pu (case 1) 然后,在XE由0.65 pu減小至0.10 pu的過程中,建立式(7)所示VSG并網系統線性化模型,并計算矩陣A的特征值,得到VSG振蕩模式如表2所示。由表2可以看出,隨著XE的減小,振蕩模式阻尼降低。當XE<0.213 pu時,系統小干擾失穩。 表2 S0=1.0 pu時VSG振蕩模式計算結果(算例1)Table 2 Computational results of oscillation modes of the VSG when S0=1.0 pu (case 1) 最后,對系統小干擾穩定性進行非線性仿真分析。仿真中擾動設置同S0=2.0 pu的情況,仿真結果如圖10所示,可以看出,XE=0.30 pu時,系統穩定,XE=0.10 pu時,系統失穩,與此前所得結論一致。 圖10 S0=1.0 pu時非線性仿真結果(算例1)Fig.10 Non-linear simulation results when S0=1.0 pu (case 1) 本節分別以VSG額定容量為2.0 pu和1.0 pu兩種情況為例,驗證2.3節給出的VSG并網系統小干擾穩定臨界短路比的有效性。 對于VSG額定容量為2.0 pu的情況,設定S0=2.0 pu,功率因數為0.98。由3.1節中圖7,系統小干擾穩定臨界短路比為4.072。為進一步驗證2.3節定義的小干擾穩定臨界短路比的有效性,分別在XE為0.15和0.25 pu的情況下,建立VSG的小信號模型,并繪制矩陣-G(s)H(s)特征值的奈奎斯特曲線,所得結果如圖11所示。可以看出,系統小干擾穩定臨界短路比分別為4.068和4.125。 圖11 S0=2.0 pu時的奈奎斯特曲線(算例2)Fig.11 Nyquist plots when S0=2.0 pu (case 2) 然后,在系統實際SCR等于以上所得小干擾穩定臨界短路比的情況下,建立VSG并網系統線性化模型,計算矩陣A的特征值,得到VSG振蕩模式如表3所示,可以看出,當實際SCR等于小干擾穩定臨界短路比時,系統基本處于臨界穩定狀態,驗證了小干擾穩定臨界短路比的有效性。 表3 S0=2.0 pu時VSG振蕩模式計算結果(算例2)Table 3 Computational results of oscillation modes of the VSG when S0=2.0 pu (case 2) 此外,XE取不同值時,以上所得小干擾穩定臨界短路比數值也略有差異,這是由于,雖然VSG穩態功率輸出恒定,XE取值不同,對圖1所示系統作穩態潮流計算,所得VSG端電壓和輸出電流穩態值不同,造成VSG小信號模型略有差異,矩陣-G(s)H(s)特征值的奈奎斯特曲線也有所不同,由此獲得的小干擾穩定臨界短路比也略有差異。但是在VSG參數和輸出功率恒定的條件下,端電壓和輸出電流穩態值差異造成的VSG小信號模型的差異不大,因此,XE取不同值時,所得小干擾穩定臨界短路比差異不大,且系統實際SCR等于小干擾穩定臨界短路比時,VSG并網系統基本在臨界穩定狀態。 最后,在系統實際SCR等于所得小干擾穩定臨界短路比時,進行非線性仿真分析。仿真中擾動設置同3.1節,所得結果如圖12所示,可以看出,當實際SCR等于小干擾穩定臨界短路比時,系統基本處于小干擾臨界穩定狀態,驗證了小干擾穩定臨界短路比的有效性。 圖12 S0=2.0 pu時非線性仿真結果(算例2)Fig.12 Non-linear simulation results when S0=2.0 pu (case 2) 對于VSG額定容量為1.0 pu的情況,設定S0=1.0 pu,功率因數為0.98。由圖9可得,小干擾穩定臨界短路比為4.695。以下進一步給出XE為0.30和0.20 pu時,矩陣-G(s)H(s)特征值的奈奎斯特曲線如圖13所示。由圖13可得系統小干擾穩定臨界短路比分別為4.671和4.737。 圖13 S0=1.0 pu時的奈奎斯特曲線(算例2)Fig.13 Nyquist plots when S0=1.0 pu (case 2) 然后,在系統實際SCR等于以上所得小干擾穩定臨界短路比的情況下,建立VSG并網系統線性化模型,計算矩陣A的特征值,得到VSG振蕩模式如表4所示,可以看出,當實際SCR等于小干擾穩定臨界短路比時,系統基本處于臨界穩定狀態,驗證了小干擾穩定臨界短路比的有效性。 表4 S0=1.0 pu時VSG振蕩模式計算結果(算例2)Table 4 Computational results of oscillation modes of the VSG when S0=1.0 pu (case 2) 最后,在系統實際SCR等于所得小干擾穩定臨界短路比時,進行非線性仿真分析。仿真中擾動設置同3.1節,所得結果如圖14所示,可以看出,當實際SCR等于小干擾穩定臨界短路比時,系統基本處于小干擾臨界穩定狀態,驗證了小干擾穩定臨界短路比的有效性。 圖14 S0=1.0 pu時非線性仿真結果(算例2)Fig.14 Non-linear simulation results when S0=1.0 pu (case 2) 本文針對僅具有電壓控制環的VSG并網系統,基于廣義奈奎斯特判據,定義了系統小干擾穩定臨界短路比,并得到了一種考慮電網強度影響的系統小干擾穩定性判定方法。 1)建立了VSG并網系統小信號模型,并將其整理為兩輸入兩輸出單位負反饋系統的表示形式。 2)采用上述建模表示形式,基于廣義奈奎斯判據,獲得了一種考慮電網強度影響的系統小干擾穩定性判定方法,定義了系統小干擾穩定臨界短路比。 3)通過仿真算例,驗證了所提小干擾穩定性判定方法和小干擾穩定臨界短路比的有效性。 對于一個具體的VSG,在選定運行狀態下,僅需一次繪制奈奎斯特曲線,便可獲得使VSG并網系統小干擾失穩連接電抗的取值區間。這一信息對于未來VSG并網規劃具有很好的借鑒和指導意義。本文是基于僅具有電壓控制環結構的VSG展開研究的,除此之外還有電流控制型等其他結構的VSG。對于電網強度對其他VSG并網構成系統小干擾穩定性的影響和相關穩定判據,將在后續發表的文章中作進一步報道。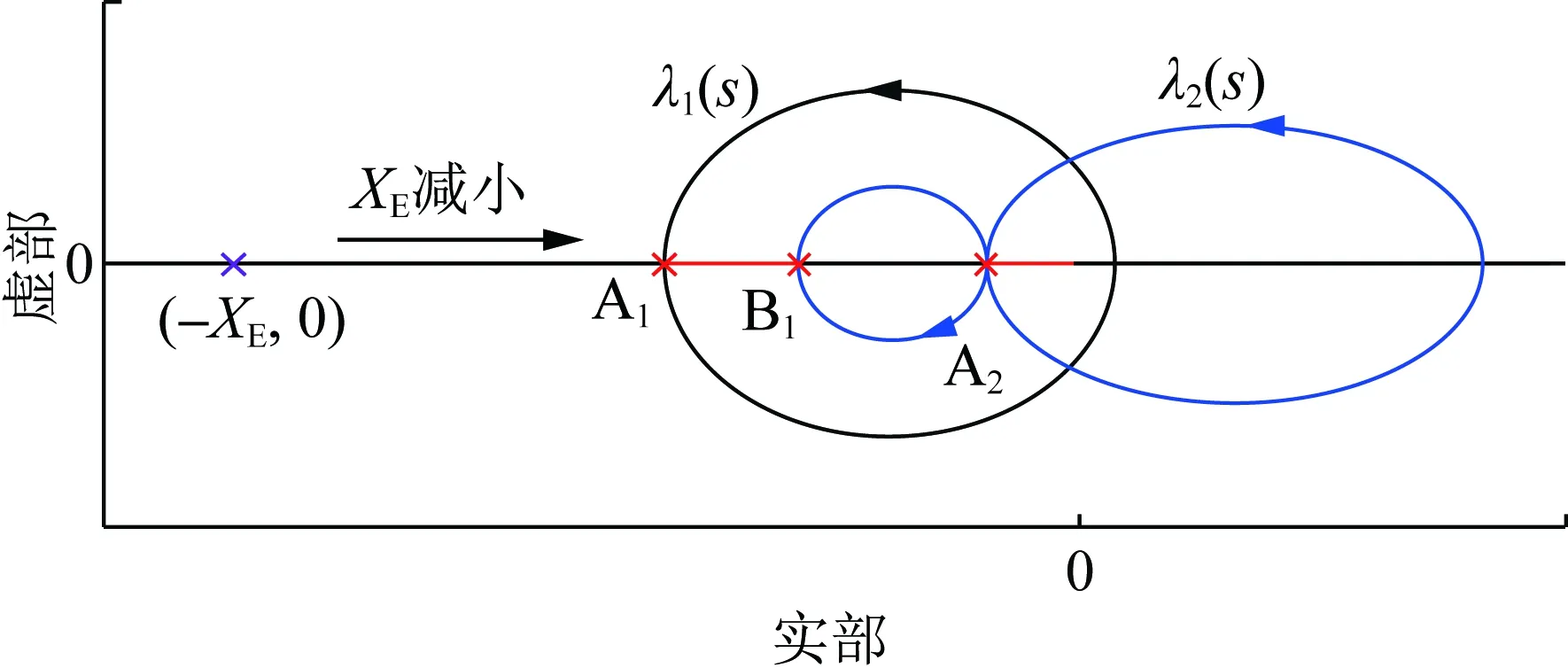
2.3 VSG并網系統小干擾穩定臨界短路比
3 算例分析
3.1 算例1
3.2 算例2
4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24裝備制造技術(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(2019年4期)2019-05-11 09:27:34家庭影院技術(2017年9期)2017-09-26 03:41:45光學精密工程(2016年6期)2016-11-07 09:07:19
