三維傾斜攝影技術在尾礦庫風險防控上的運用*
2022-03-20 12:05:50李全明隋建政
中國安全生產科學技術 2022年2期
張 紅,李全明,陳 濤,隋建政
(中國安全生產科學研究院,北京 100012)
0 引言
尾礦庫是指筑壩攔截谷口或圍地構成的、用以貯存金屬非金屬礦山進行礦石選別后排出尾礦或其他工業廢渣的場所[1],存在洪水漫頂和壩體垮塌危險,是具有高勢能的人造泥石流危險源。其構筑特性及用途必然對下游區域形成高危險性的安全隱患,可對周圍的生態環境造成一定程度的破壞,時刻威脅下游人民的生命財產安全。尾礦庫風險因素分為人為因素和自然因素2種[2]。尾礦庫全生命周期管理過程中,存在缺乏正規設計、現場施工未滿足設計要求、運行期間安全管理不到位等人為風險因素,導致尾礦庫安全隱患不斷累積,安全風險也隨之增高[3-4]。與此同時,尾礦庫絕大部分依山而建,具有泥石流、山體滑坡、不確定天氣變化等自然風險。2種風險因素疊加后,對其安全運行構成重大威脅。防范化解尾礦庫安全風險,保障尾礦庫周邊人民生命財產安全,已經成為尾礦庫安全管理的重要工作。因此,精準掌握尾礦庫安全運行數據信息、主動有效提出防控措施尤為重要[5]。
目前對于尾礦庫的安全監管多采用人工巡查及傳感器監測相結合的方法。然而,許多尾礦庫的監測監控系統不完備、監測監控技術落后、專業監測人員缺乏,容易受到天氣、人工、現場條件等諸多因素的影響,存在一定的系統誤差和人工誤差,這些都影響著尾礦庫的安全生產和安全管理水平。因此,采用現代通信、電子設備及計算機技術實現對尾礦庫監測指標數據實時、自動監測,是尾礦庫安全監管的必由之路。“空天地一體化”開展尾礦庫遠程監測為實現尾礦庫安全監管提供了新的數據獲取手段[6]。無人機傾斜攝影技術作為“空天地一體化”的重要組成部分,具有時效性強、精度高、人工成本低等特點。其能夠體現豐富、全面的目標紋理特征信息,并可精確測量地物的高度、寬度、坐標和面積[7],是獲取空間三維數據的重要手段[8]。目前,傾斜攝影技術在我國發展已有近十年時間,通常應用在城市測繪[9]、工程建筑[10]、大比例尺地形測繪[11-12]及礦山測繪[13-14]等領域。采用無人機傾斜攝影技術開展尾礦庫三維模型創建與數據分析,一方面可直觀展示庫區周邊及下游的環境分布情況,并通過歷史數據對比,掌握尾礦庫的最新運行狀況[15];另一方面可在俯視角度下捕捉出現突發事件區域的地理環境特征,為應急處置工作提供參考影像資料。
本文以我國江西省某尾礦庫為例,采用無人機傾斜攝影技術對尾礦庫及下游進行影像數據采集,并依此創建尾礦庫三維實景,明確庫區現狀、周邊及下游環境,為開展尾礦庫安全防控管理部署和制定緊急災害救援計劃提供重要依據,進一步提高尾礦庫風險防控的有效性和實用性。
1 傾斜攝影技術
1.1 傾斜攝影系統分析
傾斜攝影系統主要由無人機、五鏡頭傾斜相機(垂直、前、左、右、后共5個位面)、UAV-PPK模塊和基站組成,能夠滿足一般地理條件工作要求,如圖1所示。無人機具有造價低、機動性好、工效高等特點,被廣泛運用于軍事和民用生產。目前用于測繪的無人機基本都使用GPS定位和導航[16],但是無人機飛控的GPS單點定位精度差,極易造成影像畸變,因此,在使用過程中對周邊環境條件要求較高。然而,尾礦庫多為依山而建,庫區覆蓋范圍廣,周邊樹木茂盛,地理環境復雜,導致精準成像的難度成倍提高。通常可以使用RTK(Real-time kinematic)或PPK(post processed kinematic)技術設備解決圖像畸變問題,二者優、缺點如表1所示。
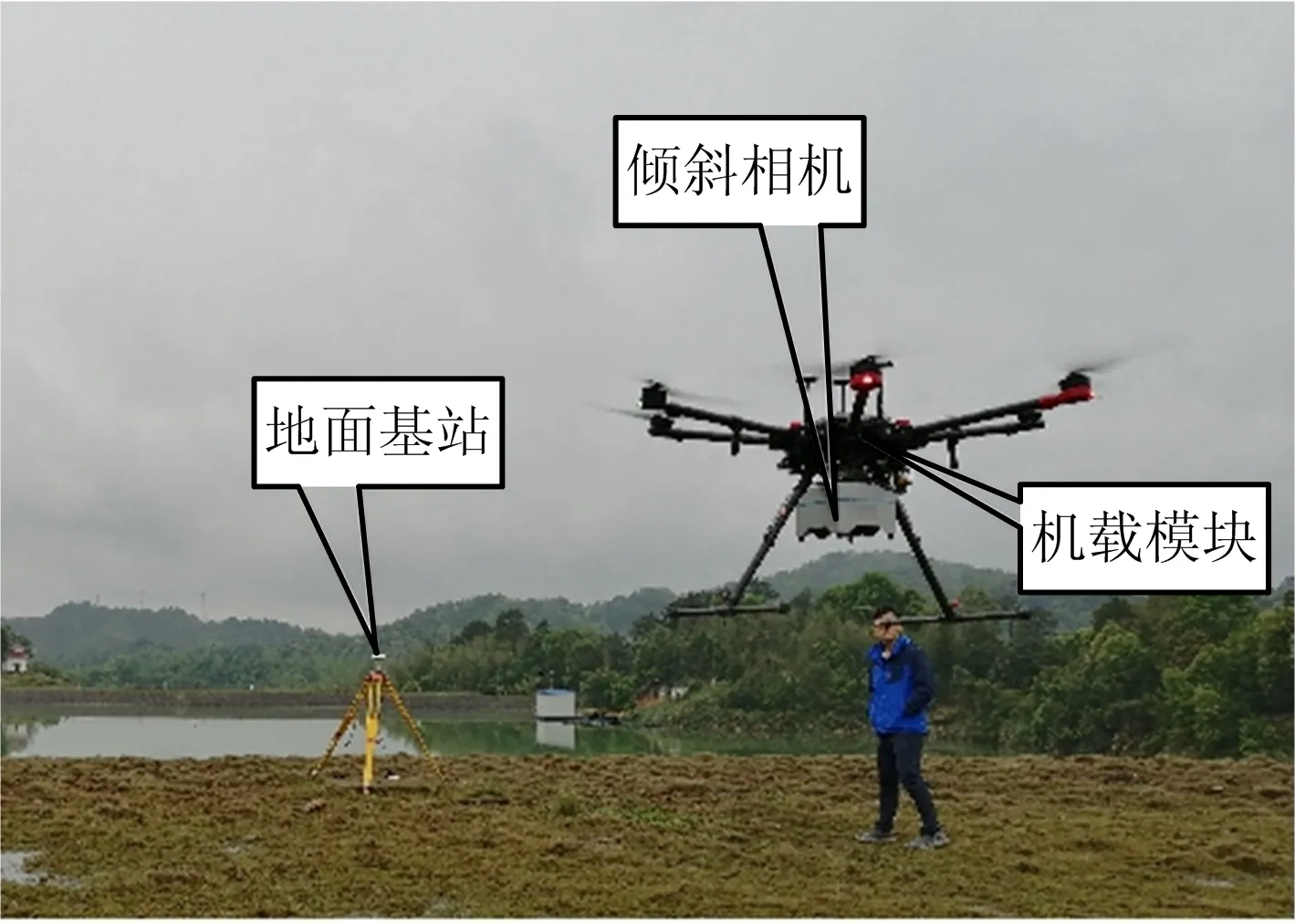
圖1 傾斜攝影系統組成Fig.1 Composition of oblique photography system
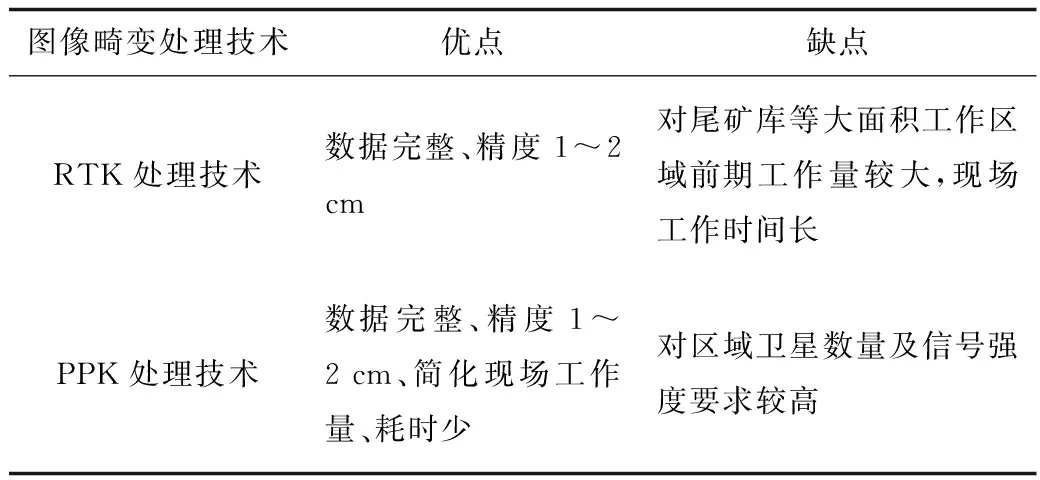
表1 RTK與PPK技術分析Table 1 Analysis of RTK and PPK technologies
此外,PPK的數據記錄模塊可直接搭載在無人機飛行平臺上,能夠大幅提高圖像坐標點精度,進行1∶500高精度免像控航空攝影測量作業。傾斜攝影數據覆蓋范圍如圖2所示。
圖2 攝影數據覆蓋范圍Fig.2 Coverage range of photography data
1.2 數據處理
傾斜攝影數據處理分為數據預處理、數據整合及模型輸出3個步驟,其流程如圖3所示。1)數據預處理主要包含:基站數據獲取、影響畸變調整、數據解算、核對數據匹配及完整度。2)數據整合主要對提取的數據進行清洗、解析及組合,形成初步傾斜攝影模型。3)模型輸出階段,主要對初始模型缺損部位進行完善,對模型水域進行修復。
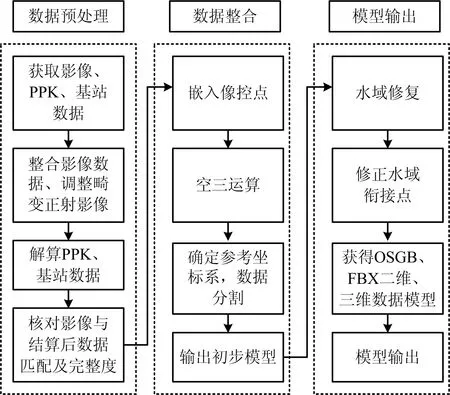
圖3 數據處理方式Fig.3 Data processing method
1.3 航拍參數優化
無人機航拍前,根據航拍影像分辨率精度需求、地形復雜程度等設置航拍關鍵參數。參數設置前所需收集尾礦庫信息主要包括:1)周邊地形高程信息,尤其是飛行區域周邊的山峰位置及高度信息。由于尾礦庫面積大,飛行期間無人機將脫離視野范圍,因此必須在航線圖中確定飛行位置,并設置安全飛行高度。2)針對特殊建筑或區域制定緊急處置措施。查看尾礦庫周邊是否存在高壓線、水域等特殊區域,飛行任務需掌握特殊區域的高精度數據,以避免撞擊或墜機。3)確認礦源磁場區域及其強弱分布。由于部分礦山開采的礦源存在高強度磁場區域且強弱分布無規律,嚴重威脅飛行安全,工作前必須確認飛行任務區域內是否存在此類情況,并及時制定應急措施。
1.4 航拍流程設計
無人機航拍流程可分為航拍線路規劃、航拍基礎數據設計、檢查飛行系統、飛控參數設置、設置其他參數與開始飛行作業6個環節,航拍流程設計如圖4所示。
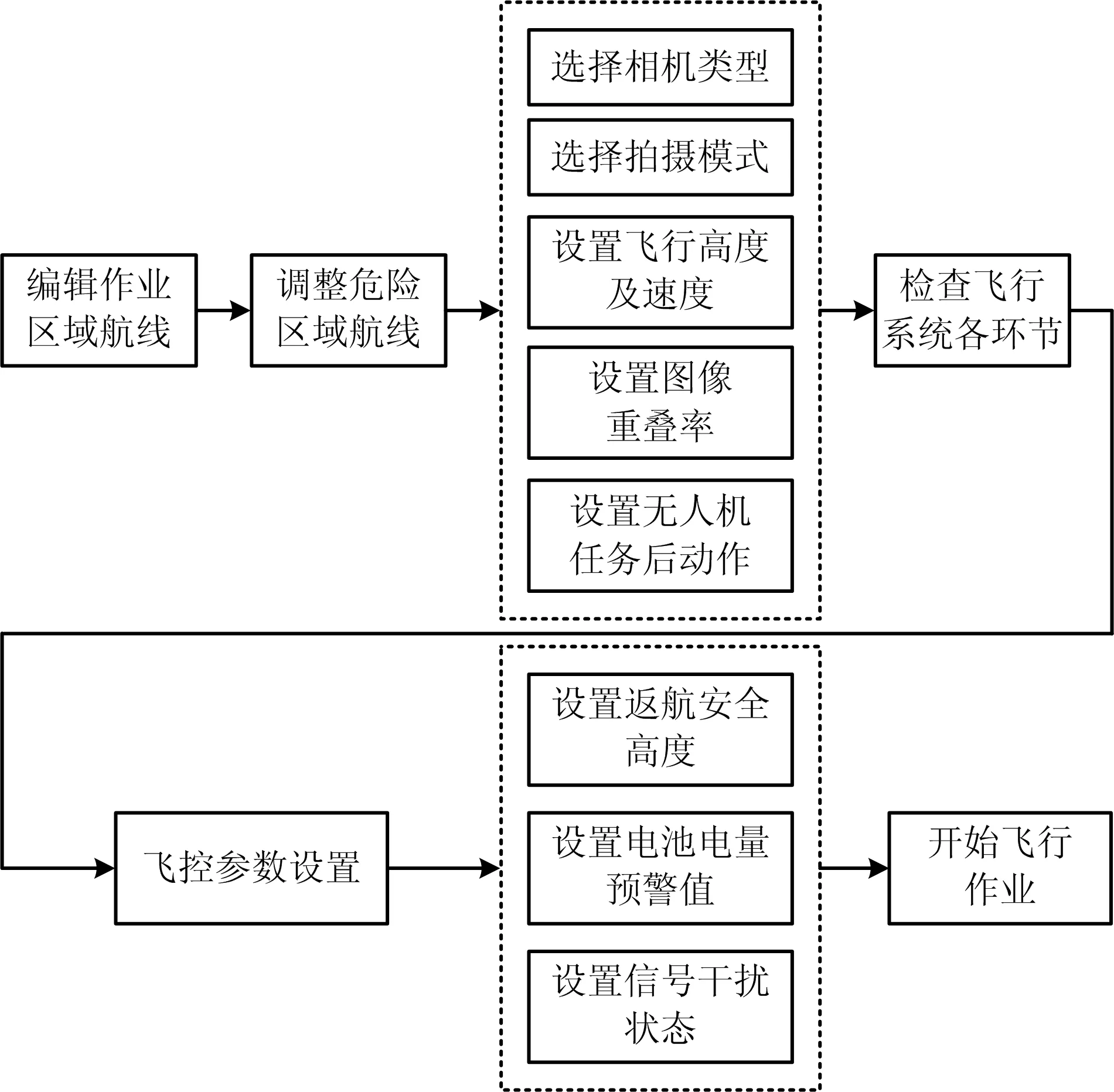
圖4 無人機航拍流程設計Fig.4 Design of UAV aerial photography
2 尾礦庫實例應用
2.1 尾礦庫基本情況
江西省某尾礦庫位處選礦廠下方的山谷中,設計總庫容66.44×104m3,屬于四等庫。庫區下游100 m范圍內有12戶居民,230 m外有某公路通過。尾礦壩為碾壓堆石壩,壩高18 m,壩頂標高+227 m,壩頂寬8.9 m,壩體上游坡比和下游坡比均為1∶1.5,壩長114.10 m,庫區中部有小面積水域。
庫區屬中亞熱帶季風濕潤氣候區,年降雨量1 458 mm。庫區水文地質條件簡單,主要為孔隙水及裂隙水2種類型。目前庫區地層穩定、連續,無不良地質現象。庫區兩岸邊坡穩定,西側山脊高程260~290 m,山坡較陡,覆蓋層薄,主要成份為變質巖風化后的坡積層;東側山脊(山頂)高程為280~330 m,山坡較緩,覆蓋層較厚,主要為黃褐色粘土;谷底高程207~230 m。此外,西側山脊左側為礦山,東側為尾礦庫,礦山西側有河流通過。
2.2 尾礦庫航線設計
為實現對尾礦庫全庫區及周邊環境高精度建模,需搭載傾斜攝影設備的無人機保持較低飛行高度,并避開周邊山體。因此,本次飛行選用大疆M600六旋翼無人機搭載五鏡頭傾斜相機及模塊,數據采集采用PPK技術設備,航飛高度240 m,飛行速度8 m/s,影像分辨率100 PPI,航飛區域面積約1.24 km2,主航線上圖像重復率為80%;根據安全因素和目標區域飛行條件設置為14條短航線,航線長度為17 349 m,以東南側為起點,采用“S”形環繞尾礦庫進行航拍,如圖5所示。
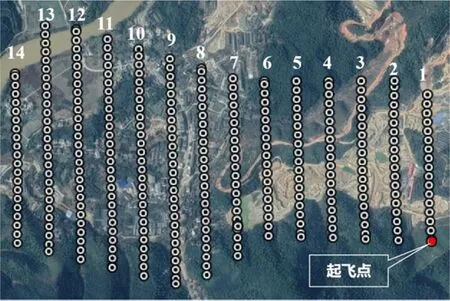
圖5 尾礦庫全景航線設計Fig.5 Panoramic route design of tailings pond
2.3 尾礦庫傾斜攝影數據分析
無人機依據圖5所示航線開展尾礦庫傾斜攝影,并對尾礦庫三維點云數據進行提取、處理,生成三維空間實景影像如圖6所示。
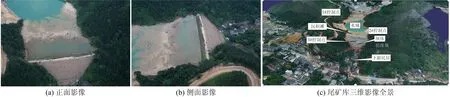
圖6 尾礦庫傾斜攝影三維影像Fig.6 Three-dimensional images of tailings pond by oblique photography
根據所獲得的尾礦庫空間三維實景,提取尾礦庫壩坡比、干灘長度、匯水面積等模型參數與尾礦庫現狀進行對比,如表2所示。
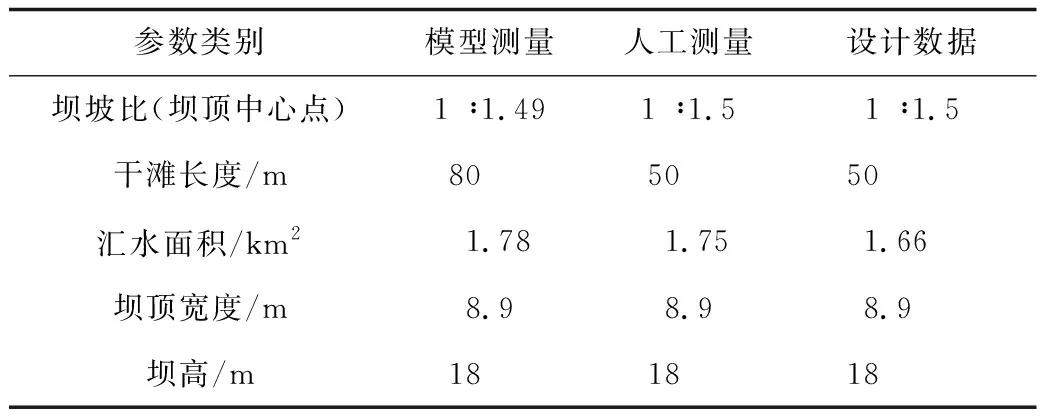
表2 尾礦庫三維模型數據對比Table 2 Comparison on 3D model data of tailings pond
根據數據對比可知,尾礦庫現狀各項參數與尾礦庫現狀實際數據基本一致。此外,相對于壩坡比在人工測量時僅能在初期壩頂與堆積壩頂2點間進行測量,無人機傾斜攝影所獲三維實景模型可在壩坡任一部位選點進行測量,更能準確反映筑壩期間的筑壩質量、壩坡比分布情況和坡面筑壩質量。
3 尾礦庫汛期防洪預測
通過對尾礦庫三維空間模型數據進行提取,尾礦庫現狀水面標高223.5 m,匯水面積為1.78 km2,汛期庫水面預測情況如圖7所示。

圖7 汛期庫水面預測Fig.7 Prediction of water level in pond during flood season
尾礦庫防洪設計標準為200 a,根據尾礦庫調洪庫容計算結果,其調洪高度為1.5 m,調洪庫容5×104m3。通過對尾礦庫三維空間實景進行汛期調洪高度線標記和調洪庫容量計算,由圖7可以看出尾礦庫汛期調洪階段最大水面邊線。經實景圖測量,汛期尾礦庫干灘長度為80 m,高于《尾礦庫安全規程》(GB 39496—2020)[1]規定的50 m標準,滿足汛期防洪要求。
4 結論
1)無人機傾斜攝影技術作為“空天地一體化”的重要組成部分,具有時效性強、精度高、人工成本低等特點,可精確測量地物的高度、寬度、坐標和面積,是獲取尾礦庫三維空間數據的重要手段。
2)通過對傾斜攝影三維數據處理,創建尾礦庫三維空間實景,可及時掌握尾礦庫庫區及周邊環境現狀,實現尾礦庫的精準管理。
3)根據尾礦庫防洪設計能力,結合尾礦庫的實際數據,可有效開展汛期防洪預測,并為尾礦庫安全防控管理部署和制定緊急災害救援計劃提供重要參考。