醫院消殺機器人作業安全與交互設計策略
2022-03-21 11:06:38王秋惠王雅馨
圖學學報 2022年1期
王秋惠,王雅馨
醫院消殺機器人作業安全與交互設計策略
王秋惠,王雅馨
(天津工業大學機械工程學院,天津 300387)
作業安全與設計質量對提高醫院公共環境消殺機器人“人機系統”運行效率具有關鍵作用。以人因工程學、交互科學、認知科學理論為視角,探究醫院消殺機器人作業安全與交互設計策略。采用層次任務與表格任務結合HTA-T分析法,構建消殺作業任務流程,剖析作業流程中典型安全事故及其致因邏輯,基于工作域分析法(WDA)對消殺作業約束條件進行描述,建立消殺工作域抽象層次模型。并對醫院消殺機器人作業SRK認知行為模式(技能型、規則性、知識性)進行判定研究,梳理認知因素匹配關系。構建消殺機器人作業安全設計評估理論模型框架,提出基于功能需求、形態結構、外觀色彩和人機交互4大安全指標要素的設計策略。該成果可為醫院公共環境消殺機器人人機工效相關基礎理論研究及設計實踐提供參考依據。
醫院消殺機器人;作業安全;人機交互;設計策略;評估模型
隨著人工智能技術與現代醫療服務水平的不斷提高,智能消殺機器人成為未來醫院感染防控的重要裝備,為傳統醫療空間消毒提供全新的工作模式。其既可減輕繁重的人工作業負荷,又可提高消殺作業效率[1]。但由于醫院環境空間、公共設施及醫患人員的特殊性,消殺機器人交互作業安全正面臨很多挑戰。如何構建安全可靠的作業流程、人機交互模式及交互設計策略,是保證醫院消殺機器人作業績效的關鍵。作業安全分析是對復雜作業的安全管理方法,可對作業過程中危險因素剖析,采取相應預防與改進措施,提出安全原則,防止事故發生和人員傷害[2]。該領域的基礎應用研究已取得很多可喜的成果:趙京等[3]從機器人自身和交互安全性2方面分析了機械結構及控制算法對機器人作業安全的作用;李錫江等[4]利用故障樹形圖分析法分析機器人安全性;黃志清等[5]提出一種基于雙分辨率2.5D分層柵格地圖的路徑規劃方法;朱蓉軍等[6]設計了機器人人機安全避碰方法;楊占力等[7]通過仿真分析驗證縱向翻轉影響機器人安全性。關于作業安全的研究,學者主要采用圖論分析、事故統計、數據可視化等方法,挖掘作業過程中潛在的危險因素:LI[8]通過分析操作者對危險行為的態度,將危險劃分為局部危險與總危險2個等級;文獻[9-10]通過路徑算法建立最優行動軌跡以此降低避碰風險;文獻[11]采用模糊層次分析法建立了安全評價框架,以確定安全指數和警示等級。
綜上所述,關于機器人作業安全的研究,目前多針對工作路徑規劃和避障操作問題,對于安全工作流程設計、人機交互策略,以及界面設計的基礎理論研究較為薄弱,尤其在醫院消殺機器人作業安全及交互設計理論研究方面。因此,在吸收前人思想的基礎上,本文運用人因工程學、交互科學以及認知科學的理論方法,對醫院消殺機器人作業交互安全設計策略進行系統研究。
1 醫院消殺機器人作業流程構建
1.1 消殺作業任務流程構建
因醫院消殺作業的復雜性,消殺機器人與人及環境之間存在一定交互關系。采用層次任務分析法(hierarchical task analysis,HTA)結合表格任務分析法(tabular task analysis,TTA),對醫院消殺機器人作業安全交互中的可變因素進行理想化處理,即假設一種通常狀態,分析消殺作業任務流程[12]。文獻[13]提出了HTA法,其將任務劃分為目標、次目標、操作和計劃等層次結構,通過收集使用技術、人機交互、團隊成員、決策和任務限制等特定數據來完成體系構建,最終輸出任務活動的詳細描述,并提供完成操作步驟,但該法并不能有效識別作業過程中的差錯。而由KIRWAN[14]于1994年提出的TTA法,可將HTA從底層任務抽取出來,并分析每個特定步驟,如潛在差錯、時間限制、觸發事件等。根據HTA與TTA結合的HTA-T分析法,設計醫院消殺機器人安全作業任務流程,如圖1所示。
(1) 定義分析任務。對醫院消殺機器人消毒作業進行任務分析,預測作業過程中潛在危險因素。
(2) 數據收集過程。對消殺機器人作業步驟、工作方式及功能等信息進行收集。同時可獲取相關任務典型事故案例,分析其致因。
(3) 變量理想處理。假設機器人執行任務時信號穩定,系統無異常狀態。
(4) 整體目標確定T。將醫院消殺作業定義為頂層目標,消殺作業任務執行需要人為參與,作業前需線性完成啟動與系統初始化任務R。
(5) 確定次目標S。將消殺作業任務分解為:消毒物質裝換、自由消殺、醫護消殺、病房消殺,次目標任務之間相互獨立。
(6) 次目標分解D。將確定的次目標確定為不同的獨立子任務目標。
(7) 子任務操作P。HTA最底層操作可為非線性,因此由子任務目標號決定(如D2和D4下一層任務號P5分別代表不同的操作)。
1.2 作業安全事故成因分析
分析消殺作業流程中的安全事故成因,可有效避免安全作業事故的發生。通過上述作業步驟分解,根據作業性質選擇合適的任務種類將HTA轉化為TTA表格。將操作層中易出現差錯的步驟按性質分為消毒物質準備、放置、消殺模式選擇、自動搜索消殺目標、對象識別、轉換消殺、任務識別、執行任務位置、移動、交互10個任務描述,結合數據收集獲取的典型事故案例中安全致因邏輯,列出其中可能出現的差錯及可能的結果,最終提出差錯糾正原則(表1)。通過分析得出,按照國家規定標準進行消毒液的準備、自動校準位置、提高機器人自身模式認知和識別能力、保持移動穩定性、對不同用戶交互分類能夠有效提高醫院消殺機器人作業安全性能。

圖1 醫院病毒消殺作業HTA任務流程

表1 消殺任務作業安全事故成因TTA分析
2 醫院消殺機器人安全認知決策
2.1 消殺機器人工作域認知決策
工作域認知是醫院消殺機器人作業流程的關鍵步驟。工作域分析(work domain analysis,WDA)可用于歸納目的描述和所分析系統功能的約束條件,包括工作域的目標、意義和限制條件。抽象層次法(abstraction hierarchy,AH)是WDA的重要方法之一,可直接獲得關于WDA的清晰理解。域目的表示工作系統存在的意義,獨立于具體情景;域價值可評估域目的范圍內作業情況;域功能可以得到作業系統所執行的功能;物理功能列舉系統執行的操作;物理對象包含工作系統應具備的條件,該層級獨立于研究目的存在[15]。如圖2所示,本研究通過AH來描述醫院消殺機器人工作域作業系統的功能,通過分析各層級之間連線數量關系,達到安全完成消殺作業這一目的。根據任務及時調整作業,將作業潛在危險度降到最小化,是消殺系統最重要的價值目標。因此要求機器人應優先滿足對工作情景的理解,正確識別任務后做出有效消殺決策,并穩定移動至消殺點。細劃域功能,得到對消殺作業安全影響力最大的物理功能,即判斷作業域是否存在不可躲避障礙物、建立作業流程、描述消殺目標所在位置、描述可躲避障礙物的位置并自我檢測作業過程中潛在威脅。為滿足物理功能實現的條件,抽象層次模型最底層還輸出了醫院消殺機器人系統應具備的物理對象。
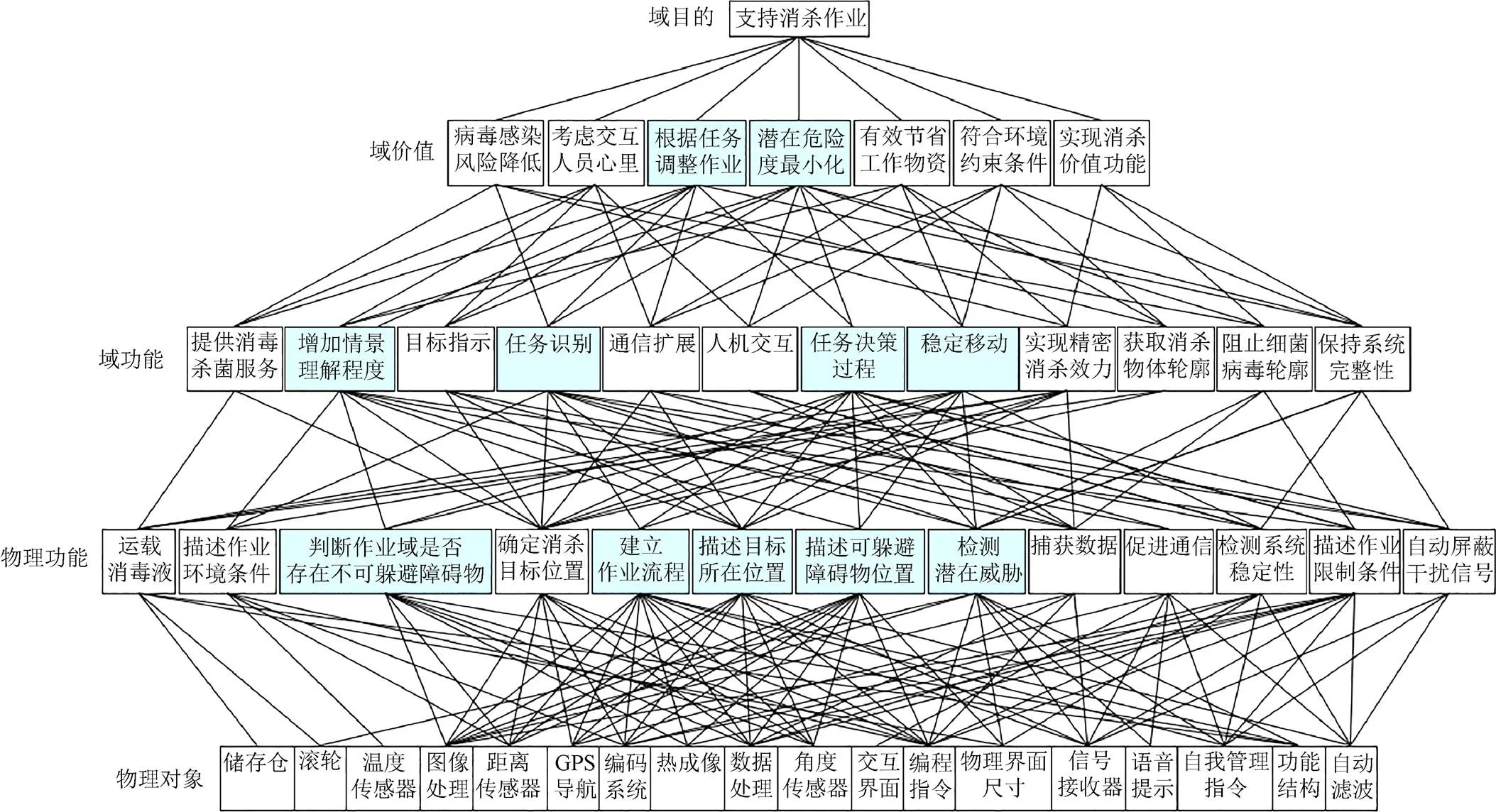
圖2 醫院消殺機器人工作域抽象層次
2.2 消殺作業安全認知行為模式
由于交互過程的復雜性,消殺機器人不僅要完成目標作業還要進行深度決策任務。當有潛在決策需要時,消殺機器人應自動識別信息數據,若信息識別不明確,將無法做出正確判斷。此時任務將出現因分解不全面或無正確識別的結果,安全隱患將由此產生。認知行為模式選擇是消殺機器人作業安全決策的前提。SRK (Skill,Rule,Knowledge)框架是RASMUSSEN[16]于1983年提出的,其綜合了各種行為過程的特點,將人的認知過程分為3種類型,即技能型、規則型和知識型。本文將SRK框架應用于研究消殺機器人認知決策模型,借鑒蔣英杰等[17]構建的認知行為模式概率化確定方法,根據決策樹的認知行為模式判定,消殺機器人作業認知模式由作業操作類型、機器人對作業環境的理解度、程序的需要性、程序的可用性、機器人對程序的理解度、機器人對程序的熟悉程度6種屬性的狀態決定,決策樹上下枝分別代表是否滿足此狀態。作業過程中環境和消殺任務多變,因此對消殺機器人認知行為模式的影響因素進行分析很有必要。由上述分析得出,消殺機器人對情景的理解、任務的識別、決策和自身移動的穩定性共同影響其作業安全性能,同時直接決定其行為,因此定義為作業認知模式的主要影響因素。為使結果更加準確,本研究結合WDA,將消殺機器人作業認知模式影響因素進行細化,在主要影響因素基礎上,選取描述作業環境、確定消殺目標位置、描述作業限制條件、檢測系統穩定性共9個匹配因素,并將其輸入決策樹所對應屬性,見表2。由于匹配因素的不確定性,很難對其進行精確度量,因此采用德菲爾專家打分法對9個影響因素的2種狀態進行權重判斷。選擇10名在機器人研究領域經驗豐富的專家及10名具備熟練技能的清潔工對匹配因素進行評價,結果取均值,見表3。

表2 消殺機器人認知行為模式匹配
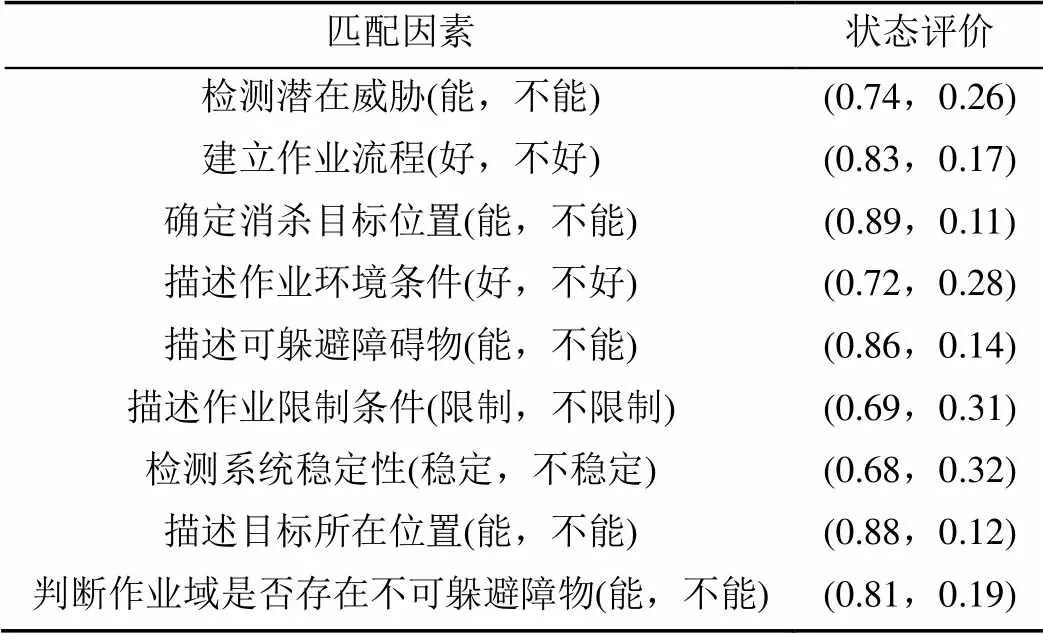
表3 9種匹配因素的狀態評價結果
繼續邀請20名專家使用層次分析法1~9標度對9種匹配因素打分,得到判斷矩陣

將矩陣每一列進行元素歸一化處理,元素一般項可表示為
按列歸一化矩陣且每行相加,求得各行平均值組成向量,得到每一個指標的權重值,其矩陣最大特征根為
根據一致性檢驗結果判斷每位專家打分結果權重合理,將20位專家打分所得權重結果取平均值得最終每組匹配因素權重,見表4。根據每個匹配因素權重,結合狀態評價打分,加權綜合得到認知行為模式影響因素最終狀態,獲得消殺機器人認知行為模式影響因素評價結果,見表5。
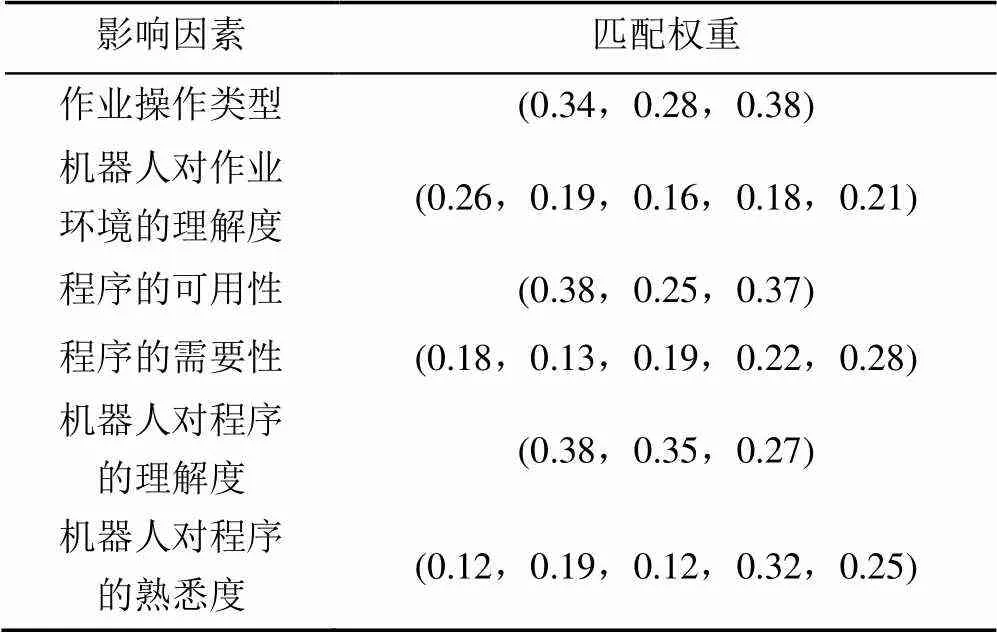
表4 認知行為模式匹配因素權重

表5 消殺機器人認知行為模式影響因素評價結果
根據認知行為模式判定,6種屬性狀態上下枝概率為,(=1,···,6;=0,1,其中0為上枝,1為下枝),決策樹9個輸出為(=,···,)。由圖3可知,技能型概率skill=P+P+P,規則型概率rule=P+P+P,知識型knowledge=P+P+P[17]。按照以上方法可得消殺機器人概率化認知行為模式結果skill=0.8332,rule=0.0928,knowledge=0.0741。因此消殺機器人作業更傾向技能型認知行為模式,現實作業過程中,機器人需不斷練習掌握作業技能,并體現到消殺作業任務中。為達到正確決策目的,設計過程中要合理安排技能表達順序,使消殺機器人在執行安全設計流程時,對不同作業情景做出正確判斷[18]。

3 醫院消殺機器人安全交互設計策略
3.1 消殺作業安全評估模型理論框架構建
(1) 理論模型框架由Ip-r (HWA-SRK).4F構成。根據消殺機器人作業流程需求特征[19],通過對工作域AH,對消殺機器人作業規程和清潔工作過程的理解進行決策識別,并對消殺機器人作業認知模式進行概率化判斷,如圖4所示,構建作業安全評估理論模型框架Ip-r(HWA-SRK).4F:交互過程I、用戶P、機器人R、層次任務分析法H、工作域分析W、抽象層次分析A,3種認知行為模式:技能型S、規則型R、知識型K,以及安全設計4要素4F:功能、色彩、造型、界面。
(2) 消殺作業安全評估流程。醫院消殺機器人作業安全認知決策流程主要分為感知、認知、決策3個步驟。根據Ip-r(HWA-SRK).4F框架內涵,其滿足上述任務要求,消殺機器人作業安全評估流程則包含6個細分化步驟:評估計劃制定、評估指標建立、評估方法選擇、數據類型選擇、測試對象選擇、以及測試任務設定[20]。
(3) 消殺機器人消殺作業安全績效測量評估方法主要將德菲爾專家法、HTA-T,WDA和AH相結合,對消殺任務進行層次分解及工作域判定[21],進而進行認知行為決策SRK。
(4) 消殺機器人作業安全交互設計4F原則[22],主要包含功能、色彩、造型以及界面設計4大層面。
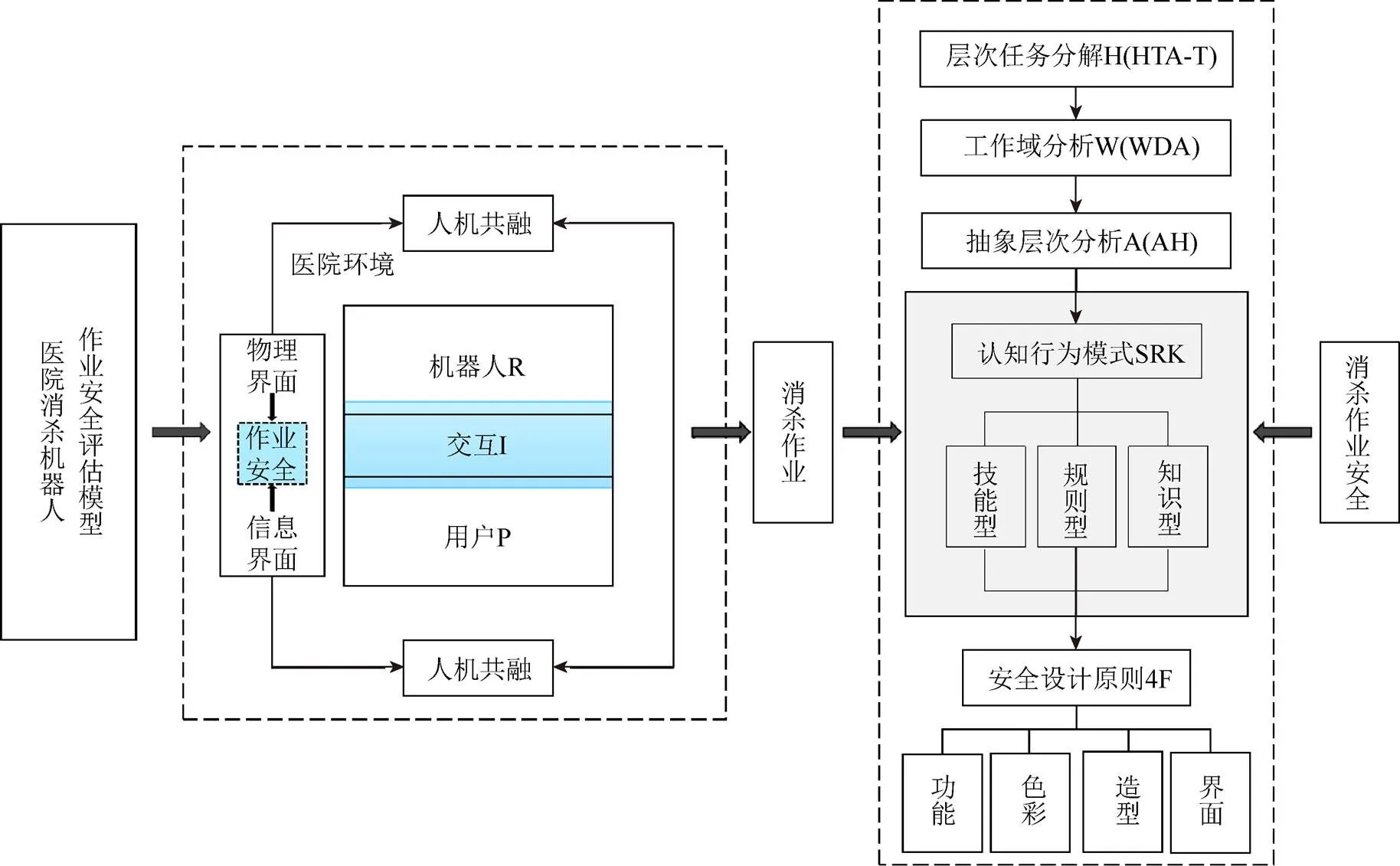
圖4 消殺機器人作業安全評估模型理論框架
3.2 功能需求安全設計策略
如圖5所示,醫院消殺機器人功能需求安全設計策略如下:
(1) 消殺功能安全設計策略。醫院消殺機器人主要消殺對象是醫護人員和院內設施。針對術前準備工作、會診后消毒及傳染病診療后的清理;院內移動設備(如藥品配送機器人)、靜態儀器和病床及衛生間馬桶等。除此消殺機器人還擔負著醫院空氣環境的消毒重任。因此,只有正確識別消殺對象的結構輪廓、環境特點、醫護人員體貌特征等因素[23],才能避免因識別障礙而產生的傷害或其他安全事故。
(2) 移動功能安全設計策略。消殺機器人在接收信號或識別消殺目標后,需要移動至目標點,移動過程中,若速度過快易造成傾倒等不安全隱患,同時不易躲避在移動過程中出現的障礙物;跟隨移動功能要求移動速度要適應跟隨設備的速度,適宜的速度可保持自身穩定,是保證作業安全的最基本要求[24]。
(3) 交互功能安全設計策略。與消殺機器人產生交互的用戶有清潔人員、醫護人員和病患及家屬。清潔人員主要擔任更換消毒液、為下一步工作選擇合適作業模式的任務,參與指導完成工作;與醫護人員的交互主要在于術前消毒和醫護工具的消殺需求設定;消殺機器人與病患及家屬雖不存在直接交互,但在進行病房內作業時,其直接進入工作狀態會對用戶產生恐懼心理[25],因此,進入病房前可進行簡單交互提醒。由于不同人群對消殺機器人的接受程度不同,不同作業任務采取不同交互模式可提升作業任務完成效率。
(4) 識別功能安全設計策略。消殺機器人工作過程中應自動識別周圍環境中威脅因素,并做出相應的決策判斷。如是否需要躲避出現的障礙物,及躲避路徑的規劃,只有正確識別和規避風險才能提高作業安全性。

圖5 消殺機器人功能分析
3.3 外觀色彩安全設計策略
人類視覺感官對色彩具有敏感性,科學的色彩設計可提升工作安全性[26]。消殺機器人外觀色彩與形態結構的融合統一,是提高作業安全的重要指標,可產生較大影響[27]。外觀色彩設計要與造型相統一,根據安全原則進行設計,并遵守國家安全標準,運用色彩對比和面積變化達到反差效果;消殺機器人屬于具有一定安全隱患的服務機器人,作業過程中需警告人們注意遠離機身作業可及范圍,因此采用黑白底色配合具有一定警示作用,將安全色應用于消殺機器人色彩設計,能夠有效提高消殺作業安全性。
3.4 形態造型結構安全設計策略
消殺機器人是實現消毒功能的載體,合理的結構設計是安全性研究的主要內容,可以將安全隱患降至最低[28]。其造型設計應偏向沉穩,具有一定震懾力,利于殺菌消毒作業目標的完成。過于美的外觀可能會使病患者感到親切,導致因過分交互行為而造成危險事故;移動結構的設計應采用接觸面積較大的造型,以增加摩擦力,降低消殺機器人在行動過程中傾倒的可能性;噴灑部位調節范圍應符合醫院設施及人體安全尺寸;對于醫院消殺機器人外觀形態美與丑的度的把握,是安全設計的重要因素,充分考慮病患的視覺、情感、交互認知,可達到人機系統最大化統一[29]。
3.5 交互界面安全設計策略
保證人與機器交互安全是醫院消殺機器人研究的重要目標之一。由于不同用戶對消殺機器人的接受程度和需求不同,若未及時進行交互模式切換,可能出現因消殺力度過大或消殺目標錯誤而產生安全事故。為有效避免人機共融安全隱患,將消殺機器人交互安全性設計策略歸納為:不同用戶對其情感認知、交互界面的安全性設計、操作警示的安全性設計。
研究不同用戶對消殺機器人的認知偏好,獲取相關需求,進一步確定交互模式內容;交互界面設計要遵循版面簡潔、功能指令清晰、轉換方式便捷的原則,防止因復雜設置而出現誤操作行為;在操作錯誤時,機器人應采取柔和清晰警示提醒,如基于人因視覺舒適度的閃爍指示燈提示、適宜聽覺系統的溫和語音提示。將交互安全設計理念貫穿于設計中,考慮人因系統的交互安全性設計指標,提高交互安全[30]。
4 結束語
本研究旨在探究醫院消殺機器人作業安全與交互設計策略,構建醫院消殺作業安全評估理論框架。首先利用HTA-T方法將消殺機器人作業任務分解,建立一套完整消殺作業流程,同時提出目標任務中危險因素的糾正原則;結合WDA描述消殺作業系統目的和消殺機器人可執行的功能,總結作業過程中支持決策的信息需求,以表明消殺機器人可自主執行任務;借鑒已有方法,得到消殺機器人完成消殺作業的安全認知模式,最終提出消殺機器人安全設計優化理論模型框架Ip-r(HWA-SRK).4F,建立基于功能、形態、色彩及交互界面設計要素的安全設計策略,為后續基礎研究與實踐應用提供參考依據。
[1] 趙銀科. 機器人作業的安全及人機匹配[J]. 工業安全與防塵, 1996, 26(8): 10-12.
ZHAO Y K. Safety of robot operation and human-machine matching[J]. Industrial Safety and Environmental Protection, 1996, 26(8): 10-12 (in Chinese).
[2] 于化偉, 王艷廷, 李曉磊. 作業安全分析研究[J]. 安全與環境工程, 2008, 15(2): 116-118.
YU H W, WANG Y T, LI X L. Operational safety analysis and research[J]. Safety and Environmental Engineering, 2008, 15(2): 116-118 (in Chinese).
[3] 趙京, 張自強, 鄭強, 等. 機器人安全性研究現狀及發展趨勢[J]. 北京航空航天大學學報, 2018, 44(7): 1347-1358.
ZHAO J, ZHANG Z Q, ZHENG Q, et al. Research status and development trend of robot safety[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(7): 1347-1358 (in Chinese).
[4] 李錫江, 劉榮, 張厚祥, 等. 基于模糊故障樹法的清洗機器人安全性研究[J]. 北京航空航天大學學報, 2004, 49(4): 344-348.
LI X J, LIU R, ZHANG H X, et al. Fuzzy fault tree analysis on safety of robot for wall cleaning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 49(4): 344-348 (in Chinese).
[5] 黃志清, 李鼎鑫, 王慶文. 非平坦地形下移動機器人安全路徑規劃研究[J/OL]. 控制與決策: 1-9 [2021-11-15]. http://kns. cnki.net/kcms/detail/21.1124.TP.20210104.1513.025.html.
HUANG Z Q, LI D X, WANG Q W. Research on safe path planning of mobile robot inune-ven terra in[J/OL]. Control and Decision: 1-9 [2021-11-15]. http://kns.cnki.net/kcms/detail/21. 1124.TP.20210104.1513.025.html (in Chinese).
[6] 朱蓉軍, 夏晶, 趙思遠, 等. 鉆錨機器人人機安全避碰方法[J]. 西安科技大學學報, 2020, 40(5): 823-830.
ZHU R J, XIA J, ZHAO S Y, et al. Human-robot safety collision avoidance method for drill-anchor robot[J]. Journal of Xi'an University of Science and Technology, 2020, 40(5): 823-830 (in Chinese).
[7] 楊占力, 萬媛, 王洋, 等. 風電塔筒檢測爬壁機器人設計與安全性分析[J]. 科學技術與工程, 2020, 20(15): 6113-6121.
YANG Z L, WAN Y, WANG Y, et al. Analysis of safety and stability of wall-climbing robot[J]. Science Technology and Engineering, 2020, 20(15): 6113-6121 (in Chinese).
[8] LI L B. Safety and risk assessment of civil aircraft during operation[M]. London: IntechOpen, 2020: 12-23.
[9] KANAZAWA A, KINUGAWA J, KOSUGE K. Adaptive motion planning for a collaborative robot based on prediction uncertainty to enhance human safety and work efficiency[J]. IEEE Transactions on Robotics, 2019, 35(4): 817-832.
[10] AOUDE G S, LUDERS B D, JOESPH J M, et al. Probabilistically safe motion planning to avoid dynamic obstacles with uncertain motion patterns[J]. Autonomous Robots, 2013, 35(1): 51-76.
[11] ZHENG G Z, ZHU N, TIAN Z, et al. Application of a trapezoidal fuzzy AHP method for work safety evaluation and early warning rating of hot and humid environments[J]. Safety Science, 2012, 50(2): 228-239.
[12] 陳農田, 王帥, 高文韜, 等. 基于層次任務分析理論的飛行員進近著陸操縱任務分析[J]. 民航學報, 2018, 2(6): 84-87.
CHEN N T, WANG S, GAO W T, et al. Pilot approaching and landing manipulating task analysis based on HTA theory[J]. Journal of Civil Aviation, 2018, 2(6): 84-87 (in Chinese).
[13] JOHN A, STANTON N A. Task analysis[M]. London: Taylor & Francis, 2000:1-8.
[14] KIRWAN B. A guide to practical human reliability assessment[M]. London: Taylor & Francis, 1994: 580: 49-78.
[15] STANTON N A, SALMON P M, WALIKER G H. Human factors methods: a practical guide for engineering and design[M]. Burlington: Academic Press, 2013: 73-77.
[16] RASMUSSEN J. Skills, rules, and knowledge; signals, signs, and symbols, and other distinctions in human performance models[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1983, SMC-13(3): 257-266.
[17] 蔣英杰, 孫志強, 宮二玲, 等. 一種認知行為模式的概率化確定方法[J]. 計算技術與自動化, 2011, 30(1): 75-80.
JIANG Y J, SUN Z Q, GONG E L, et al. A probabilistic method to determine cognitive behavior mode[J]. Computing Technology and Automation, 2011, 30(1): 75-80 (in Chinese).
[18] 吳海彬, 楊劍鳴. 機器人在人機交互過程中的安全性研究進展[J]. 中國安全科學學報, 2011, 21(11): 79-86.
WU H B, YANG J M. Progress in robot safety research during human-robot interaction[J]. China Safety Science Journal, 2011, 21(11): 79-86 (in Chinese).
[19] 董瑋, 詹慶東. 基于層次任務分析的社交網站信息構建評估: 以花瓣網為例[J]. 圖書情報工作, 2012, 56(17): 98-103, 66.
DONG W, ZHAN Q D. Evaluation of social network sites information architecture using hierarchical task analysis— taking huaban website as an example[J]. Library and Information Service, 2012, 56(17): 98-103, 66 (in Chinese).
[20] 佟瑞鵬, 崔鵬程. 基于深度學習的不安全因素識別和交互分析[J]. 中國安全科學學報, 2017, 27(4): 49-54.
TONG R P, CUI P C. Unsafe factor recognition and interactive analysis based on deep learning[J]. China Safety Science Journal, 2017, 27(4): 49-54 (in Chinese).
[21] 龔時雨, 譚躍進. 工程系統一體化安全風險模型研究[J]. 中國安全科學學報, 2007, 17(2): 149-154, 2.
GONG S Y, TAN Y J. Research on integrated safety risk model for engineering system[J]. China Safety Science Journal: CSSJ, 2007, 17(2): 149-154, 2 (in Chinese).
[22] AL-HAKIM L, WANG M, XIAO J Q, et al. Hierarchical task analysis for identification of interrelationships between ergonomic, external disruption, and internal disruption in complex laparoscopic procedures[J]. Surgical Endoscopy, 2019, 33(11): 3673-3687.
[23] HOFFMAN R R, MILITELLO L G. Perspectives on cognitive task analysis: historical origins and modern communities of practice[M]. New York, Taylor & Francis, c2009: 35-46.
[24] 李君, 支錦亦, 李然, 等. 基于認知任務分析的智能系統交互設計路徑研究[J]. 包裝工程, 2020, 41(18): 29-37.
LI J, ZHI J Y, LI R, et al. Interactive design approach of intelligent system based on cognitive task analysis[J]. Packaging Engineering, 2020, 41(18): 29-37 (in Chinese).
[25] ZESTIC J, SANDERSON P, DAWSON J, et al. Defining information needs in neonatal resuscitation with work domain analysis[J]. Journal of Clinical Monitoring and Computing, 2021, 35(4): 689-710.
[26] 龔建偉, 陸際聯, 高峻堯. 移動機器人失控的安全防范[J]. 機器人, 2003, 25(4): 300-303.
GONG J W, LU J L, GAO J Y. Safe-running area control for mobile robot[J]. Robot, 2003, 25(4): 300-303 (in Chinese).
[27] 劉立家, 胡建旺, 孫慧賢. 層次分析法中判斷矩陣的調整方法[J]. 兵器裝備工程學報, 2020, 41(2): 221-224.
LIU L J, HU J W, SUN H X. Adjustment method of comparison matrix in analytic hierarchy process[J]. Journal of Ordnance Equipment Engineering, 2020, 41(2): 221-224 (in Chinese).
[28] 馮玲. 基于PAD三維情感測量的分形圖評價[J]. 泰山學院學報, 2014, 36(3): 47-51.
FENG L. The fractal images evaluation based on the there-dimensional PAD emotional measurement[J]. Journal of Taishan University, 2014, 36(3): 47-51 (in Chinese).
[29] 林鴻, 姚洋, 陳江. 設計安全發展綜述研究[J]. 包裝工程, 2020, 41(12): 9-15, 22.
LIN H, YAO Y, CHEN J. Development of design safety[J]. Packaging Engineering, 2020, 41(12): 9-15, 22 (in Chinese).
[30] REASON J T. Human error[M]. Cambridge: Cambridge University Press, 1990: 1-320.
Work safety and interaction design strategies of hospital disinfection robot
WANG Qiu-hui, WANG Ya-xin
(School of Mechanical Engineering, Tiangong University, Tianjin 300387, China)
Safety and design quality play a key role in enhancing the operation efficiency of “Human-Robot System” of hospital public environment disinfection robots. Based on ergonomics, interaction science, and cognitive science, explorations were conducted on the safety design and interaction strategies of the hospital disinfection robot. The hierarchical task method was employed and combined with the table task method (HTA-T) to construct the task flow of disinfection operation. The typical safety accidents in the operation process and causative logic were analyzed, thereby establishing an abstract model of disinfection tasks based on the work domain analysis (WDA) method. The SRK decision analysis method was utilized to judge the cognitive behavior pattern mode (skill-based, rule-based, or knowledge-based) of hospital disinfection robot operation, and to match the relationship of cognitive factors. The theoretical model framework of operation safety design evaluation for the disinfection robot was constructed, and the design strategies based on four safety indicators were proposed: functional requirements, morphological structure, appearance color, and human-robot interaction. The outcome can shed light on the basic theoretical research and design practice of human-robot ergonomics of hospital public environment disinfection robots.
hospital disinfection robot; operation safety; human-robot interaction; design strategies; evaluation model
18 May,2021;
TP 272;TP 242;X 931;TB 472
10.11996/JG.j.2095-302X.2022010172
A
2095-302X(2022)01-0172-09
2021-05-18;
2021-08-20
20 August,2021
王秋惠(1969–),女,教授,博士。主要研究方向為智能人因學SHRE、機器人人因工程HRE、人機交互和適老化設計。E-mail:wangqiuhui@126.com
WANG Qiu-hui (1969–), professor, Ph.D.Her main research interests cover smart human-robot ergonomics, robot ergonomics, human-robot interaction, design for the elderly. E-mail:wangqiuhui@126.com
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
兒童繪本(2018年10期)2018-07-04 16:39:12
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
小朋友·快樂手工(2016年5期)2016-05-14 17:18:34
中國衛生(2015年8期)2015-11-12 13:15:20
中國衛生(2014年7期)2014-11-10 02:33:12
兒童故事畫報(2013年3期)2013-06-24 05:40:30
