基于改進典型相關分析的中低速懸浮系統異常檢測方法
2022-03-22 08:40:18龍志強
同濟大學學報(自然科學版) 2022年2期
王 平,梅 子,龍志強
(1.中國空氣動力研究與發展中心設備設計及測試技術研究所,四川綿陽 621000;2.國防科技大學智能科學學院,湖南長沙 410073)
中低速磁浮列車作為一種新型的城市軌道交通工具,越來越得到公眾的關注和認可。懸浮系統作為中低速磁浮列車的關鍵系統之一,其安全性和可靠性對中低速磁浮列車的運行具有十分重要的影響。其中,異常檢測技術作為一種提高系統運行安全的有效手段,受到了學術界和工業界的廣泛關注和研究。因此,為提高中低速磁浮列車懸浮系統的安全性和可靠性,研究懸浮系統的異常檢測技術具有十分重要的意義。
國外,Harrou等提出了一種基于主成分分析(principal component analysis,PCA)的MCUSUM異常檢測策略,能更好地檢測出系統的微小異常[1]。Bi等提出了一種基于PCA的異常檢測模型,能夠準確有效地檢測出異常,提高了算法的效率和穩定性[2]。Xie等針對在線和準確的異常檢測問題提出了一種基于雙邊PCA的異常檢測方法,實現了快速準確的實時異常檢測[3]。Pan等提出了一種用于傳感器數據集成核PCA和關聯規則挖掘的數據驅動異常檢測方法,可實現衛星電力系統的異常檢測[4]。Yin等提出了一種改進的數據流聚類算法,并根據改進的算法設計了異常檢測模型,所建立的模型能夠隨著數據流的變化進行修改,從而及時檢測出異常的發生[5]。Gu提出了一種系統的方法來識別客流異常的性質并動態估計其警報級別,能夠很好應用于預警管理和優化客流組織策略的實時決策[6]。Li提出了一種新的基于群集的異常檢測方法來檢測異常航班,能夠在事故發生之前識別和減輕風險[7]。針對物聯網應用程序中實時檢測異常問題,Lyu提出了一種Fog-Empowered異常檢測方法,不僅能夠減少延遲和能耗還能實時檢測異常,并且有較高的檢測精度[8]。針對從異常環境中的訓練集導出的主成分可能會被異常扭曲的問題,O’Reilly等提出了一種最小體積橢圓主成分分析的分布式異常檢測方法,能夠得到更為穩健的訓練集主成分[9]。針對大多數異常檢測算法無法滿足有效性和實時能力的問題,Ding提出了一種基于長短期記憶(long shortterm memory,LSTM)神經網絡和高斯混合模型(Gaussian mixture models,GMM)的實時異常檢測算法[10]。Yang等提出了一個基于二部圖和共聚的異常檢測創新框架,能夠在新浪微博數據集上高精度地檢測個體和群體異常[11]。Yan提出了一種深度半監督異常檢測方法,并將該方法應用于燃氣輪機燃燒室異常檢測方面,能夠有效地檢測出燃燒室的異常或故障[12]。Lu等提出了一種用于異常檢測的半監督機器學習算法,解決了傳統的基于關鍵質量指標的硬決策方法難以承擔大數據環境下監控體驗質量異常檢測任務的問題[13]。針對無線通信中的頻譜異常檢測問題,Feng等采用深結構自編碼神經網絡對頻譜異常進行檢測,并以時頻圖作為學習模型的特征,同時用閾值來區分異常和正常數據[14]。為了解決無法獲得異常的經驗知識或歷史數據完全沒有標記而導致的傳統故障識別方法不適用等問題,Li等提出了一種新穎的基于深度學習的機械設備異常檢測方法[15]。Liang等提出了一種共享的連接深度神經網絡,用于電力消耗時間序列異常預測[16]。
國內,對于車載靈活數據速率控制器局域網絡,羅峰等提出了一種基于支持向量機的異常入侵檢測算法[17]。針對多波束海底地質數據的異常問題,何書鋒等提出了一種新的異常檢測方法——深度支持向量檢測算法[18]。王慧珍等提出了一種基于Logistic集成學習的列車MVB網絡異常檢測方法[19]。考慮無人機傳感器易受網絡攻擊問題,充分利用數據的時間相關性,李晨等提出了針對無人機傳感器數據的異常檢測模型[20]。針對非規則采樣且具有缺失值的多維航空時序數據,閆媞錦等提出了非規則采樣多維時序數據異常檢測算法[21]。韓昭蓉等提出了一種基于雙向LSTM模型的軌跡異常點檢測算法。該方法的檢測性能顯著優于恒定速度閾值法、不考慮數據時序性的經典機器學習分類算法和卷積神經網絡模型[22]。為了解決訓練樣本數據集中正類、負類樣本不平衡的問題,姚宇等提出一種考慮負類樣本信息的加權超橢球體支持向描述方法[23]。針對傳統異常檢測模型在數據不平衡情況下對少數異常類樣本識別效果較差的問題,王杰等提出了一種基于改進擴散映射的支持向量數據描述算法,構建新的模型并將其應用于工業異常檢測[24]。針對核動力系統故障類型多、故障發生概率小、故障樣本匱乏的特殊問題,基于夾角余弦距離計算理論,從正常歷史運行數據出發,王雯珩等提出一種檢測系統異常的算法,有效應對了故障樣本不足的現實問題[25]。針對目前大多數方法僅從單一視角檢測業務流程執行異常而導致的異常檢測不全面問題,孫笑笑等提出了一種基于上下文感知的多角度業務流程在線異常檢測方法[26]。
此外,雖然在實際工程應用中,根據《中低速磁浮交通車輛懸浮控制系統技術條件CJ/T458-2014》,目前懸浮系統已具備一套自診斷系統,且該自診斷系統根據上述經驗閾值進行異常檢測,但額定的懸浮間隙以及間隙波動的情況比較復雜。主要有:
(1)根據線路情況和列車的狀況調整額定的懸浮間隙,如北京線設計為8mm,長沙線為9mm等,且懸浮控制器會根據速度的變化來調整額定的懸浮間隙。另外,由于每個傳感器和結構安裝的差異性使得每個點的額定懸浮間隙不一定是8mm。
(2)列車運行時由于速度、軌道不平順等多種因素綜合作用,或者列車懸浮靜止時由于車軌共振等因素作用導致異常的間隙值低于經驗閾值,從而導致漏報。
綜上所述,雖然LSTM等深度學習方法取得了較好的結果,但實際工程中不能標記出足夠多的異常數據。而多元分析技術能利用歷史數據進行異常檢測,且不需要大量的異常數據,甚至直接通過健康數據就能檢測異常數據。常用的多元分析技術有基于PCA、基于偏最小二乘方法(partial least squares,PLS)和基于典型相關分析(canonical correlation analysis,CCA)的異常檢測方法。雖然三種方法都有模型訓練和異常檢測兩步,但又有一定的區別。基于PCA的檢測方法在整個過程中只考慮一個數據集,基于PLS的檢測方法考慮的是過程變量和質量相關變量,而基于CCA的檢測方法面向的是系統中存在明確的輸入輸出關系且輸入輸出數據在線可測的情況,即基于CCA的檢測方法可以視為基于PCA和基于PLS的檢測方法的一種擴展[27]。因此,針對懸浮系統異常檢測問題,利用懸浮系統的輸入輸出數據,提出了一種基于改進的CCA的多維時間序列異常檢測方法。通過CCA處理懸浮系統的多維數據以獲得故障檢測指標,即二次統計量。由于懸浮系統中部分數據呈非高斯分布導致二次統計量也呈非高斯分布的問題,使用Box-Cox變換將每種類別下建立的二次統計量轉換為高斯分布變量,并利用高斯分布的置信區間來確定異常閾值。
1 懸浮系統的異常數據
1.1 數據分類
由于懸浮系統在不同的運行場景下所產生的數據之間存在較大的差異,故需要對數據進行劃分,以便在不同的運行場景下進行異常檢測,這樣有利于提高檢測的可靠性。懸浮系統在運行中會產生大量的數據,主要包括懸浮間隙、電磁鐵電流、懸浮電磁鐵的垂向加速度、懸浮控制器的輸入電壓和車輛運行速度。
圖1為懸浮監控單元中某一個懸浮控制單元在某一天的間隙數據,由車庫內、出庫、正線運行和回庫4部分數據組成,其中,一天的數據約不到70萬個樣本點,而在正線運行過程中采集的懸浮數據有近50萬個采樣點。因此,正線運行過程的數據是本文的研究重點。由圖可知,在正線運行的數據中,站內懸浮靜止的間隙數據(如第1個虛線區域所示)與站間運行的間隙數據(如第2個虛線區域所示)的幅值有明顯的差異。
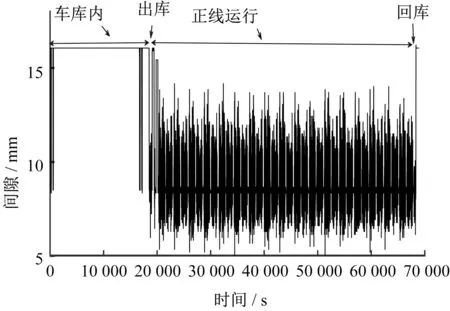
圖1 某一個懸浮控制單元在某一天的間隙數據Fig.1 The gap data of a certain suspension control unit on a certain day
為了更為直觀地反映兩者之間的差異,從懸浮系統的歷史數據中選擇一段列車從始發站運行到終點站的懸浮系統歷史數據,如圖2所示。從圖2可以看出,站內懸浮靜止的間隙數據與站間運行的間隙數據之間的差異大且站間運行的間隙波動較為頻繁。因此,本文將磁懸浮列車的數據分為2類(站內靜止懸浮和站間行駛),其中,第1個虛線框中的數據屬于站內靜止懸浮,第2個虛線框中的數據屬于站間行駛。
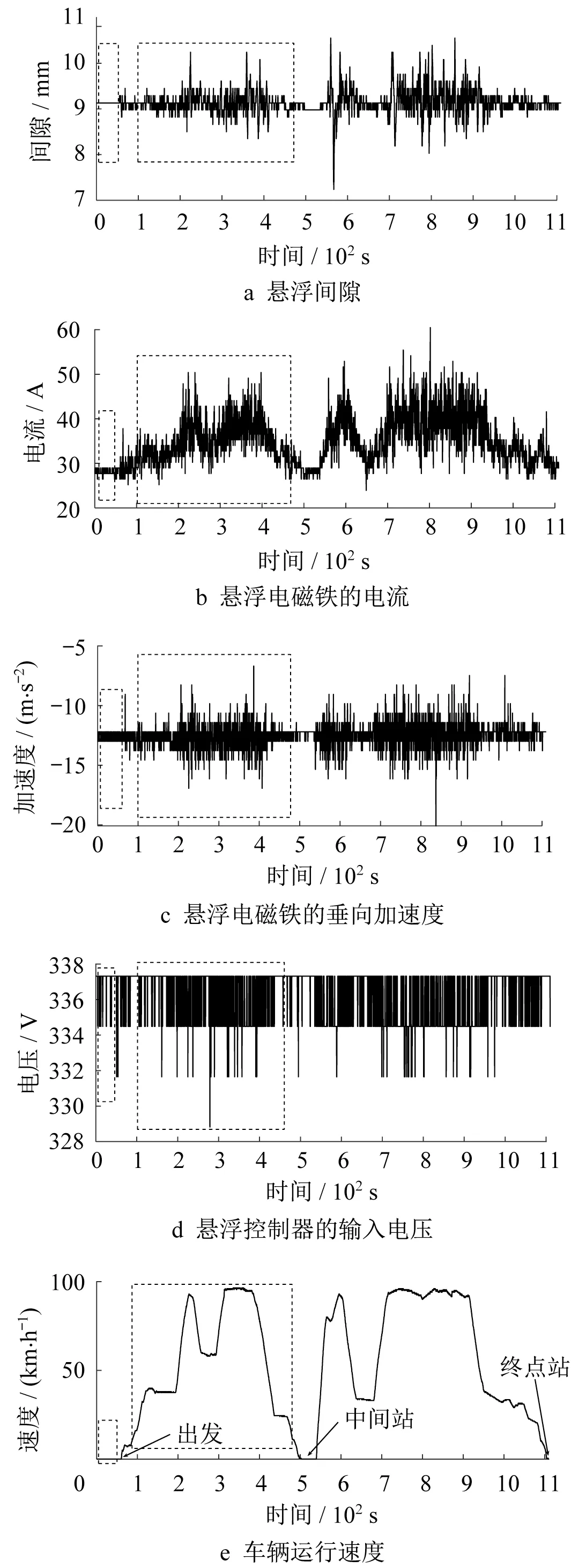
圖2 懸浮系統的歷史數據曲線Fig.2 The historical data curve of the suspension system
1.2 典型的異常類型
結合工程經驗和運營數據,本文從站間行駛和站內靜止懸浮中分別選擇一些典型的異常。
1.2.1 站間行駛時異常類型
本文從站間行駛的歷史數據中選擇含有3類異常的數據。圖3~圖5分別為第1類異常、第2類異常和第3類異常的數據,其中虛線框中的數據屬于異常數據,圖a中兩條直線分別為基于經驗的上、下限閾值。當前數據來源于標準間隙為9mm的懸浮系統,則基于經驗的上、下限閾值分別為5mm和13mm。
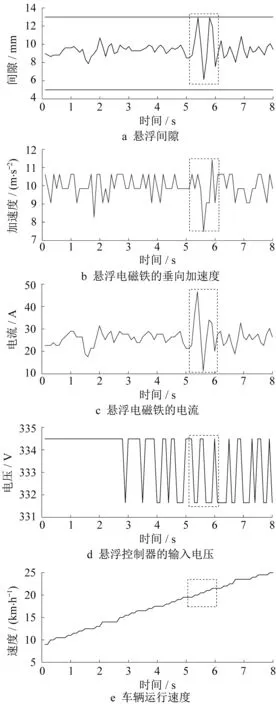
圖3 第1類異常的數據Fig.3 The first type of abnormal data
圖3中間隙有明顯的波動,但沒有超過經驗閾值,此時加速度、電流和電壓也對應有一定的波動。在實際工程中,當懸浮系統過三型接頭或彎道時容易發生該類異常。對于這類異常,通過經驗閾值不一定能檢測出來。圖4的這類異常的現象是間隙有很大的波動,且超過經驗閾值,此時加速度、電流和電壓也對應有巨大的波動。在實際工程中,當懸浮系統多次與軌道發生碰撞時容易發生該類異常。對于這類異常,通過經驗閾值很容易檢測出來。圖5的這類異常中,除了個別位置的間隙稍微大點外,其他位置的間隙沒有明顯的波動,且都沒有超過經驗閾值,此時電流和電壓也沒有明顯的波動,但加速度的波動很明顯。在實際工程中,當加速度傳感器有異常或加速度傳感器的靈敏度比間隙傳感器高或控制器內部接插件出現問題時容易發生該類異常。對于這類異常,根據經驗閾值方法無法檢測出來。
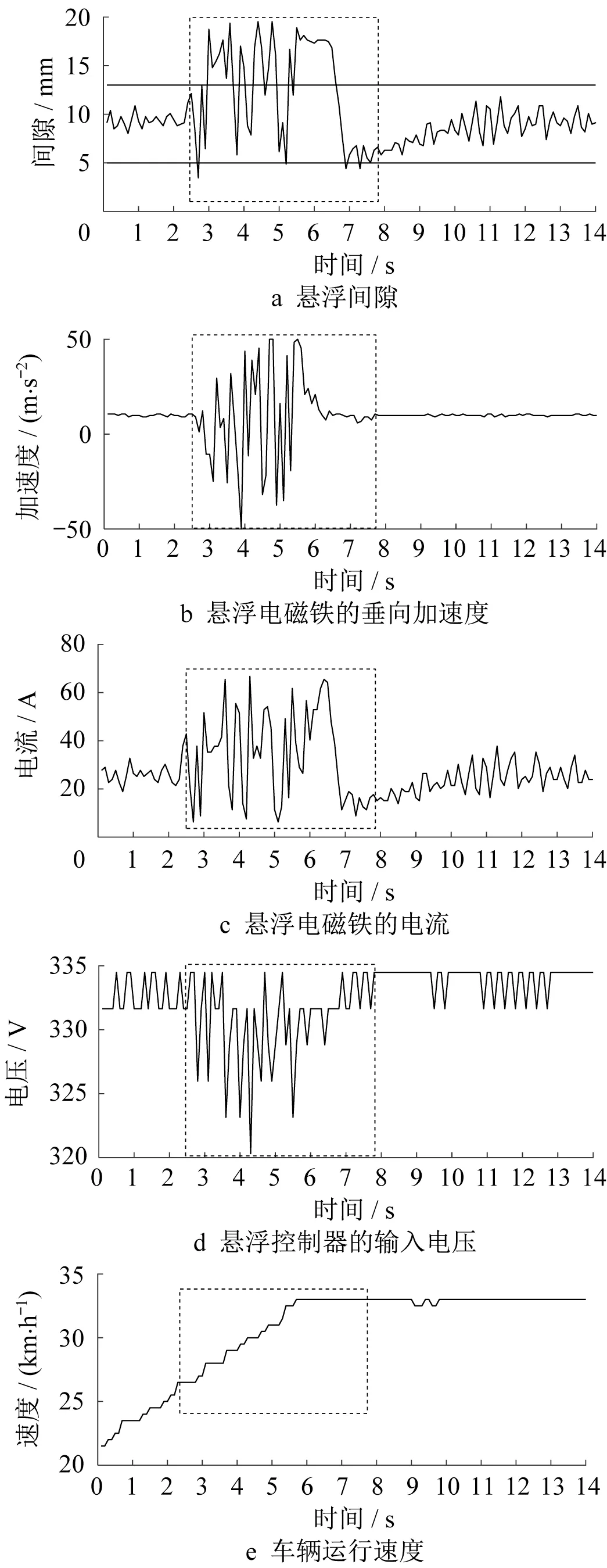
圖4 第2類異常的數據Fig.4 The second type of abnormal data
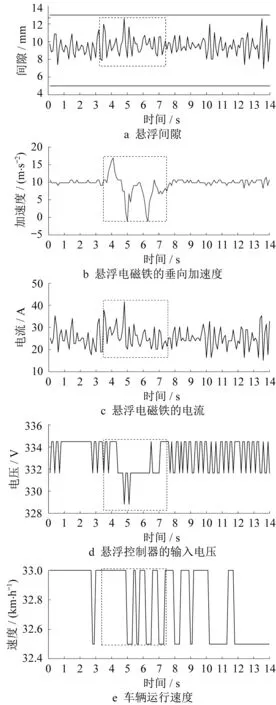
圖5 第3類異常的數據Fig.5 The third type of abnormal data
1.2.2 站內靜止懸浮時異常類型
本文從站內靜止懸浮的歷史數據中選擇含有第4類異常的數據。圖6為第4類異常的數據,其中虛線框中的數據屬于異常數據。這類異常的現象是間隙沒有明顯的波動,此時電壓不變,但電流有明顯的波蕩,加速度有劇烈的波動。在實際工程中,當列車與軌道產生共振時容易產生這類異常,但經驗閾值方法無法檢測出來。
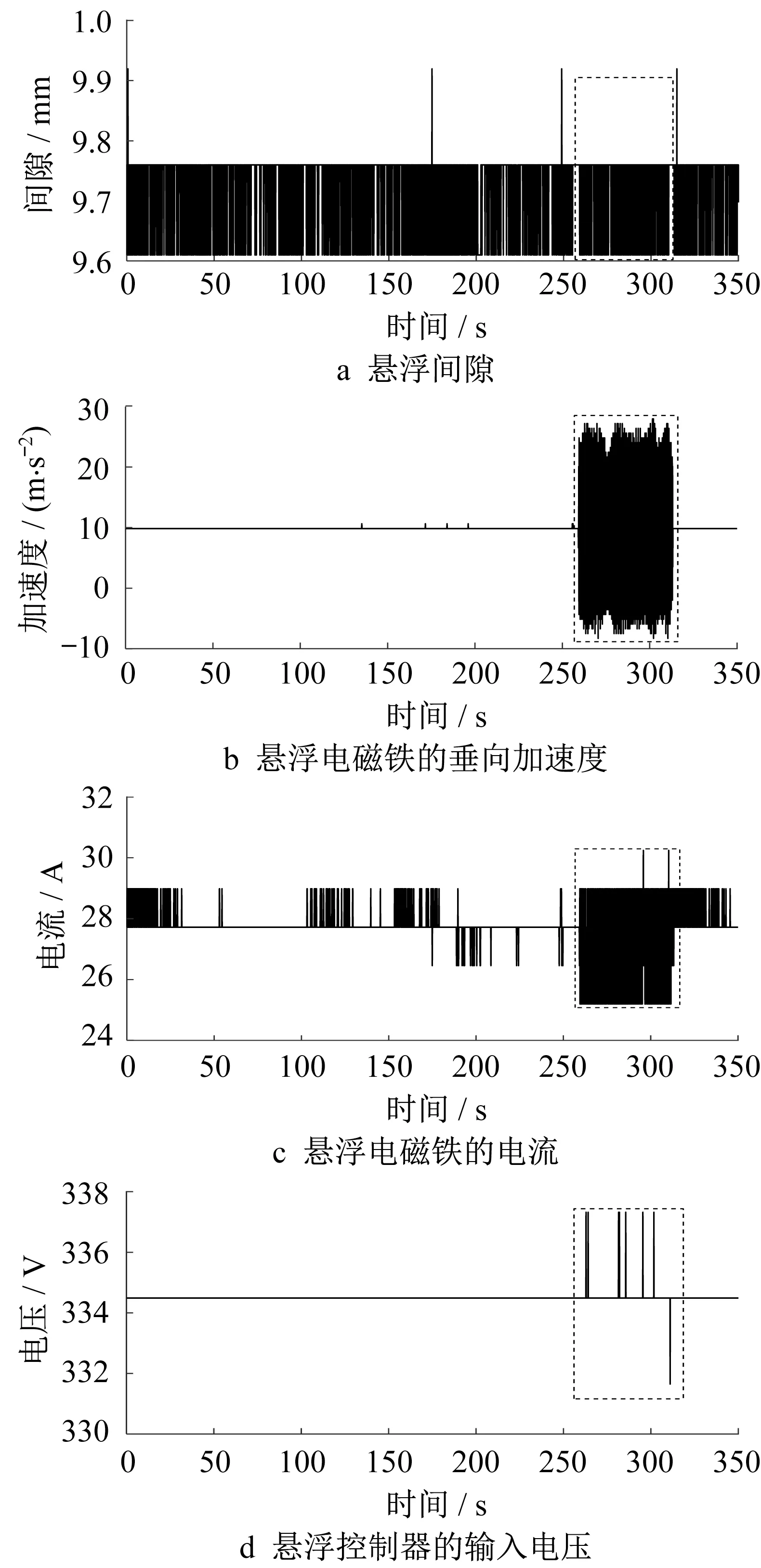
圖6 第4類異常的數據Fig.6 The fourth type of abnormal data
2 異常檢測方法
考慮多維時間序列進行異常檢測時,一般會面臨兩方面的問題:檢測異常的指標難以建立和數據呈非高斯分布難以處理。
由于經驗閾值方法僅采用懸浮系統的間隙數據,并沒有充分利用懸浮系統的其它數據,導致該方法對于第3類和第4類異常的檢測能力存在一定的不足。對此,利用懸浮系統的間隙、電流、加速度、電壓和速度等數據,采用CCA建立指標。
由于懸浮系統中間隙、電流、加速度、電壓和速度等數據并不都服從高斯分布,導致當直接通過CCA處理懸浮數據并獲得檢測指標,即二次統計量后,二次統計量不服從高斯分布。此時,通過常規的閾值設置方法獲得的異常閾值,很容易導致誤報或漏報的情況。因此,需要將二次統計量的分布轉換成高斯分布。
對此,通過Box-Cox變換將每種類別建立的二次統計量轉換為高斯分布變量,并利用高斯分布的特點來確定不同類別下的異常閾值。
2.1 傳統的CCA算法
假設某一個類別下的N個過程數據樣本可表示為

式中:x0(i)和y0(i)(i=1,…,N)是在相同類別下測得的過程輸入和輸出向量;l和m分別為輸入和輸出的變量個數。
通過式(3)和式(4)去掉平均值,即
2.2 基于Box-Cox變換的異常閾值設定
2.2.1 傳統閾值設定的不足
根據文獻[30]進行閾值設置。
當Q(k)為高斯分布時,通過公式(17)獲得的閾值會比較理想。然而,當Q(k)是非高斯分布時,該方法確定的閾值將產生較大誤差。
2.2.2 新閾值的設定
為了確定與系統的不同健康狀況相對應的Q(k)的范圍,可以通過Box-Cox變換將非高斯分布轉換為高斯分布[31],然后利用高斯分布的性質來確定Q(k)的范圍。
Box-Cox轉換的過程為通過式(20)將(p1,p2,…,pn)轉換為(z1,z2,…,zn)。

其中,λ是一個使得每個獨立的pj(λ)服從正態分布N(μ,σ2)的常數。為了確定λ的值,定義將聯合概率密度函數(p1(λ),p2(λ),…,pn(λ))為
其中,In是n階單位向量。
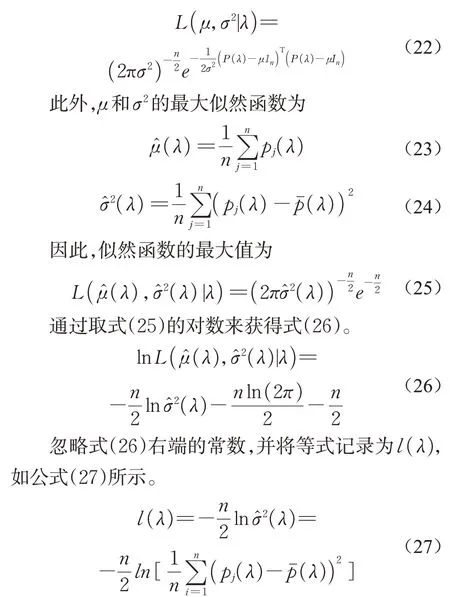
λ固定時,將μ和σ2的似然函數表示為
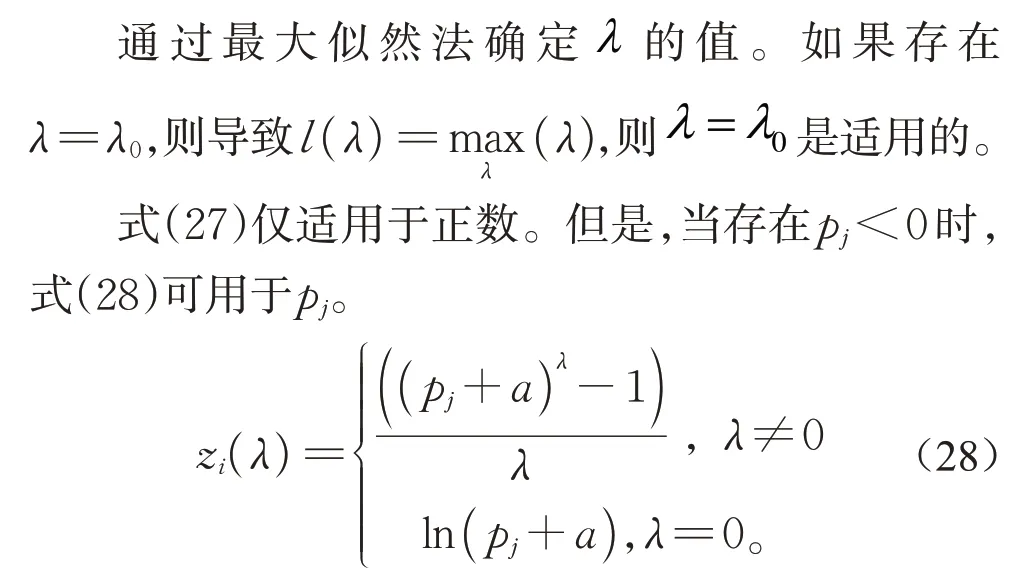
在經過式(28)處理后,其他步驟與式(20)~(27)相同。
通過Box-Cox變換將Q(k)的分布轉換為高斯分布后,選擇[μ-3σ,μ+3σ]作為異常閾值,這意味著在這個范圍內約99.73%的樣本是健康的[33]。
2.3 算法流程
異常檢測的流程如圖7所示,它由模型訓練和異常檢測兩部分組成。左側的虛線框是模型訓練,右側的虛線框表示異常檢測。
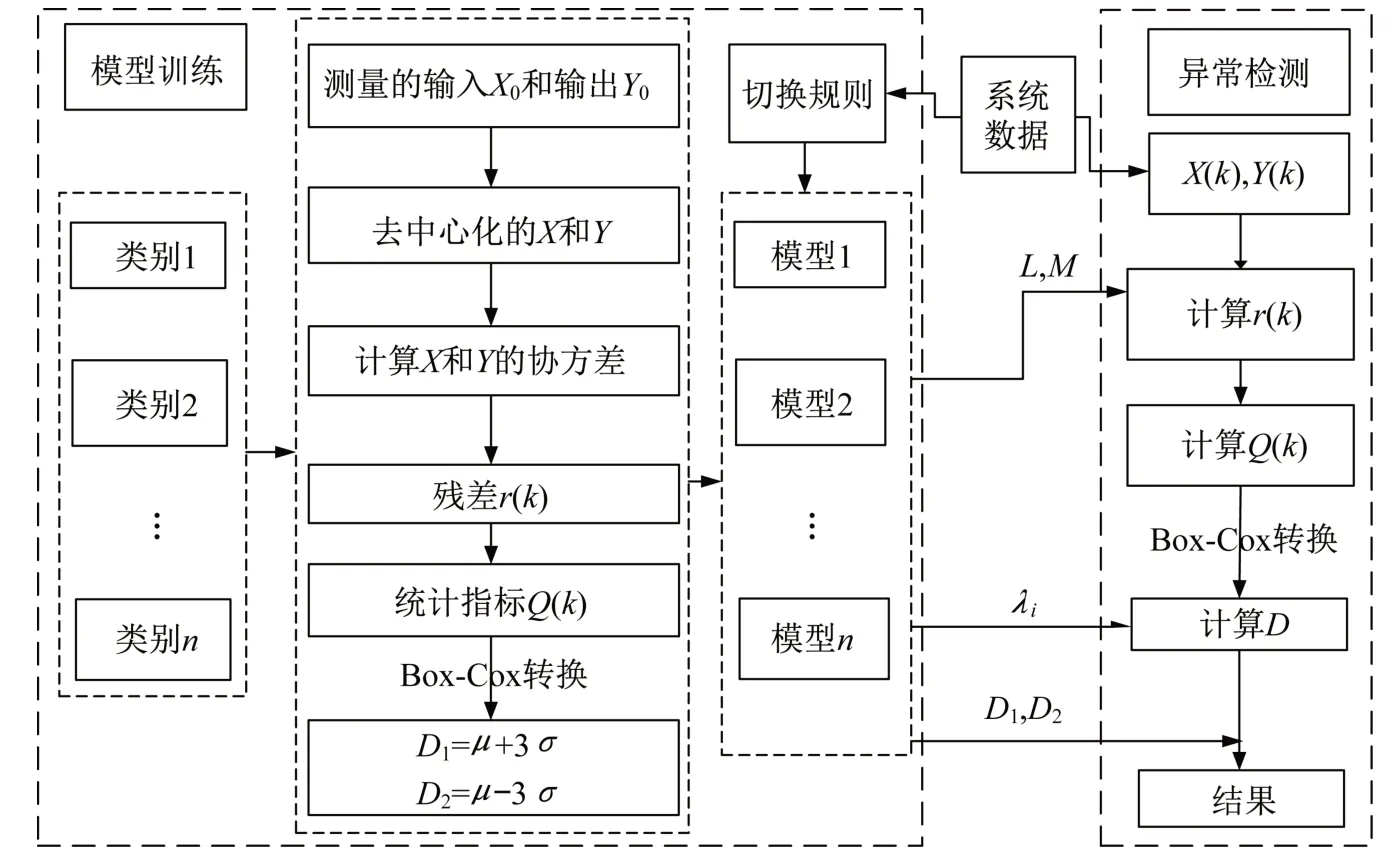
圖7 異常檢測流程圖Fig.7 The flow chart of anomaly detection
模型訓練主要是通過健康的歷史數據獲得每個類別下的異常檢測模型和用于異常檢測的μx、μy、Σx、Σy、Σxy、γ、ρ、L、MT、D1和D2。模型訓練的步驟為
(1)獲得n個類別;
(2)在第n0個類別下獲得N個健康樣本,分別構建X0和Y0;
(3)根據式(3)~(9)計算μx,μy,X,Y,Σx,Σy,Σxy;
(4)根據式(11)~(16)計算τ、R、L、MT、r和Q;
(5)根據式(20)、式(21)和式(27)計算λ和z,并根據置信區間計算閾值;
(6)存儲該類別下μx、μy、Σx、Σy、Σxy、τ、R、L、MT;
(7)n0<n?是,返回到步驟2);否則,結束。
而異常檢測主要是根據數據判斷系統當前的類別,然后調取該類別下的μx、μy、Σx、Σy、Σxy、τ、R、L和MT用于計算當前的殘差,再將殘差與D1和D2進行比較。異常檢測的步驟為
(1)獲得k時刻的數據x(k)和y(k);
(2)判斷和切換當前的類別;
(3)選擇當前類別下μx,μy,Σx,Σy,Σxy,L和MT;
(4)根據式(15)和式(16)計算r(k)和Q(k);
(5)根據式(20)或式(28)計算z(k);
(6)判斷:
μ-3σ<z(k)<μ+3σ?系統是健康的;
其他?系統是異常的。
3 實驗結果與分析
3.1 數據處理與分析
使用懸浮系統的監測數據,其中一段數據為健康數據,另一段數據為含有3類異常的數據。由于使用多維數據,因此,只通過長度為4個采樣點的移動時間窗口獲得140 000組訓練數據。
圖8為懸浮間隙、電流、電壓、加速度和速度的正態分布檢驗圖。從圖中可以看出,懸浮間隙、電流、電壓、加速度和速度這5個量的分布并不都呈高斯分布。
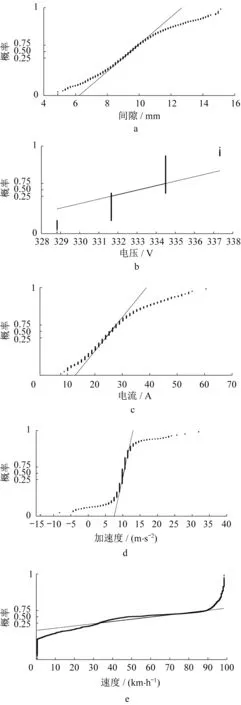
圖8 懸浮系統數據的正態分布檢驗圖Fig.8 The normal distribution test chart of suspension system data
由于多維數據中有部分數據不呈高斯分布,如果直接采用CCA處理多維數據并獲得二次統計量Q,那二次統計量Q的分布也不理想,如圖9所示。此時,根據二次統計量Q,利用傳統的閾值設置方法所獲得的閾值會很不合理,即,當使用式(17)~(19)來計算Q的閾值時,將不可避免地導致較大的誤差。通過式(17)~(19)可得,μ0=2.224 6×10-5,s=
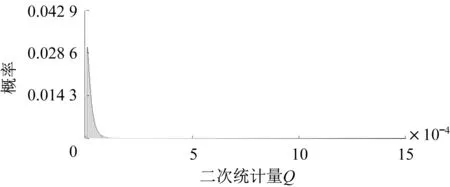
圖9 Q的分布直方圖Fig.9 The distribution histogram of Q

圖10為通過CCA獲得的Q值,且這些值絕大部分都大于通過傳統閾值設置方法獲得的閾值Jth,Q。在圖10中,大量樣本明顯分布在閾值以上。因此,該方法不可行。
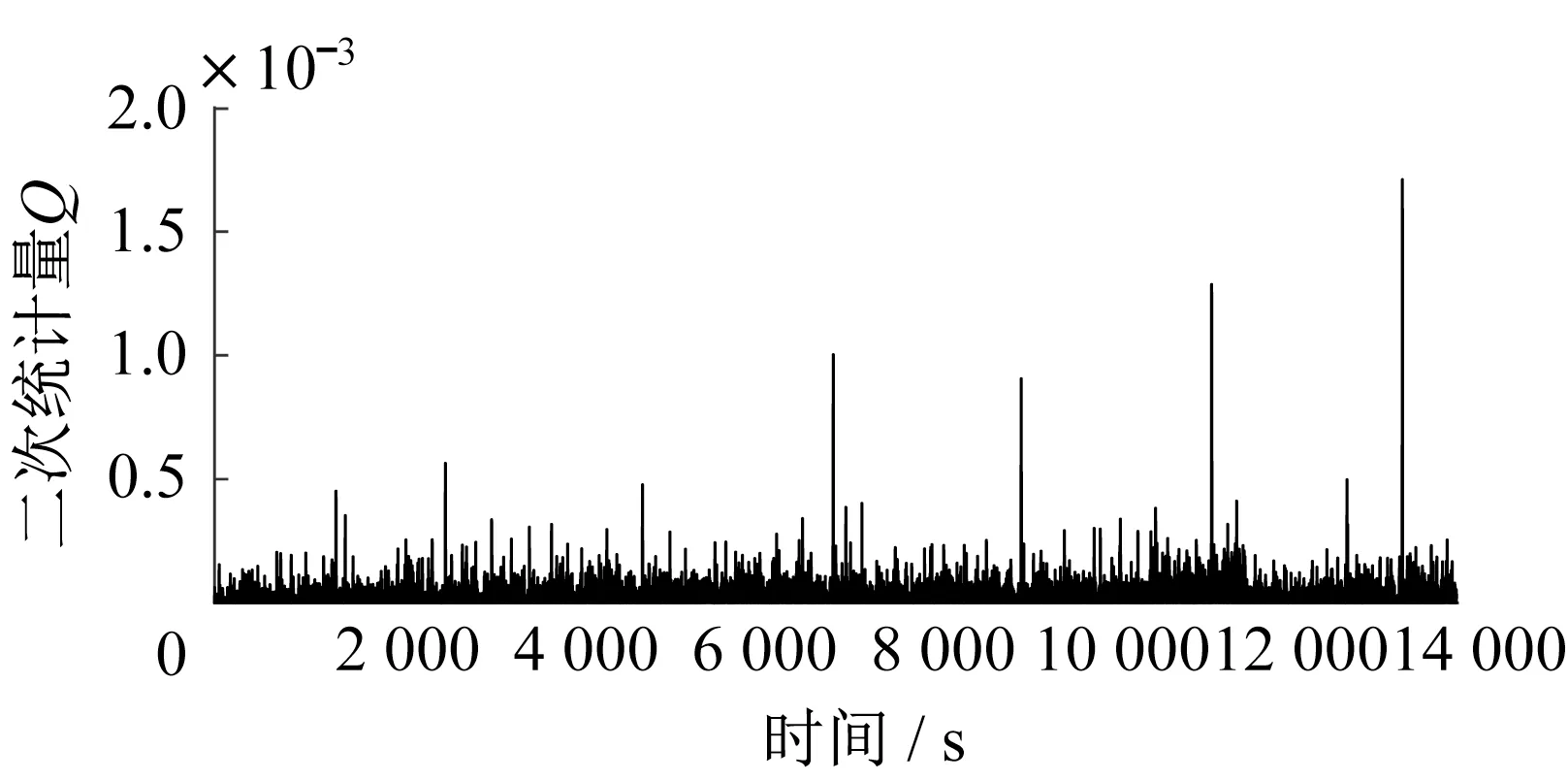
圖10 Q值及傳統方法的閾值Fig.10 Q value and the threshold of the traditional method
圖11為Q的正態分布檢驗圖。從圖11可以看出,Q的分布不遵循高斯分布。對此,可通過Box-Cox變換將Q變換為正態分布變量Q1,即將Q代入式(20)~(28),并獲得的參數λ為0.138 2。
圖12和圖13是Q1的曲線和分布直方圖。由圖12和圖13可知,Q1的分布明顯比Q的分布更接近高斯分布。為了進一步證明這點,可通過Q1的正態分布檢驗圖進行直觀顯示,如圖14所示。與圖11相比,圖14中幾乎所有的離散點都分布在直線附近。這表明Box-Cox變換可以有效地將非高斯分布數據轉換為高斯分布數據。

圖11 Q的正態分布檢驗圖Fig.11 The normal distribution test chart of Q
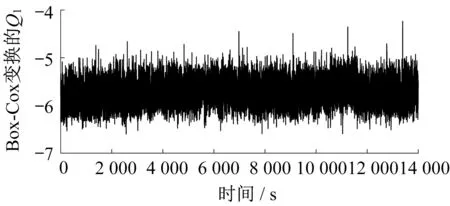
圖12 Q1曲線Fig.12 The Q1 curves
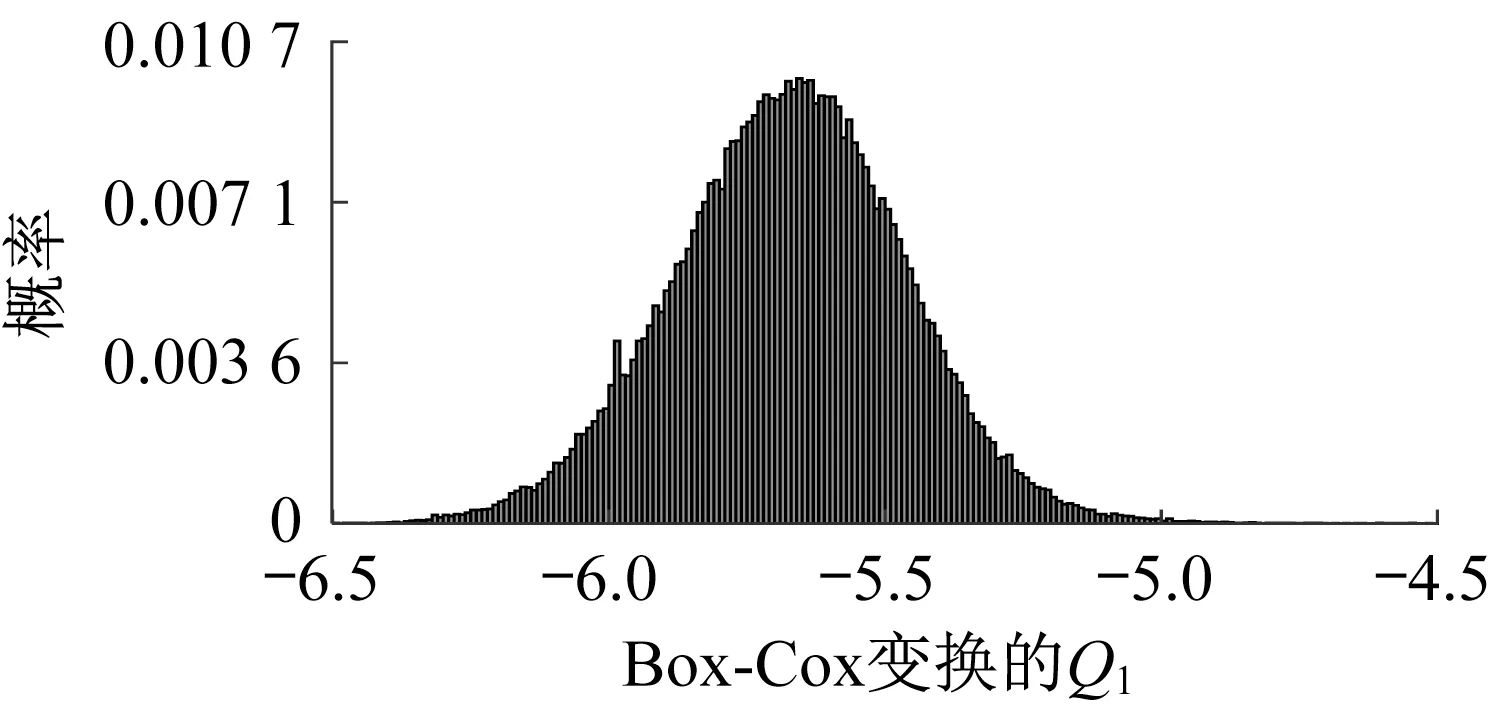
圖13 Q1分布直方圖Fig.13 The distribution histogram of Q1
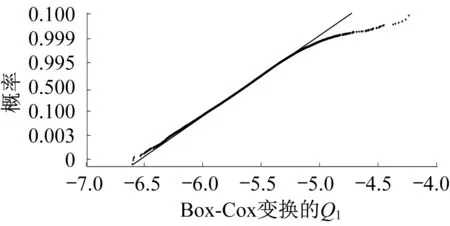
圖14 Q1的正態分布檢驗圖Fig.14 The normal distribution test chart of Q1
3.2 異常檢測結果分析
圖15為本文方法對站間行駛下3類異常的檢測結果。圖15的a~f分別為間隙、加速度、電流、電壓、速度的測量數據和二次統計量及其對應的閾值,3類異常分別用3個虛線框圈出,從左往右分別是第1類、第2類和第3類異常,且圖f中正方形為本文方法檢測出的異常點。由圖f可知,本文提出的方法能有效檢測出3類異常。
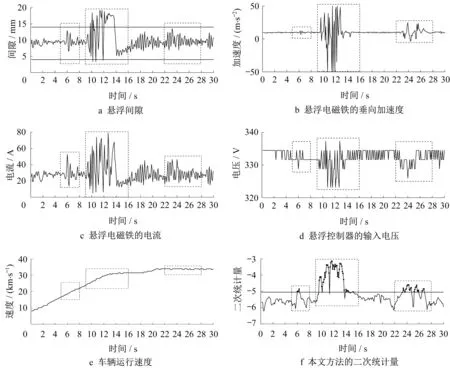
圖15 站間行駛下3類異常的檢測結果Fig.15 The detection results for three types of abnormalities under driving between stations
圖16為本文方法對第4類異常的檢測結果,其中直線為本文的閾值。
第4類異常持續的時間為538個采樣點,本文的方法能檢測出531個點,這說明本文方法能有效檢測出第4類異常。
為驗證所提方法的有效性,從現有的運營線數據中提取了32個第1類異常數據、104個第2類異常數據、41個第3類異常數據、208個第4類異常數據,分別采用本文的方法、基于K-medoids的方法[32]和基于SVDD的方法[33]計算異常的檢測率,計算結果如表1所示。

表1 檢測結果對比Tab.1 Comparison of test results
由表可知,對于第2類異常,3種方法的檢測率都為100%;對于第1類和第3類異常,本文方法的檢測率明顯比另外兩種高;對于第4類異常,3種方法的檢測率都為100%。綜上所述,與基于K-medoids的方法和基于SVDD的方法相比,本文的方法能更有效地檢測出4類異常。
4 結語
針對懸浮系統異常檢測問題,為進一步提高異常檢測率,提出了一種基于改進的CCA的多維時間序列異常檢測方法。通過CCA處理懸浮系統的多維數據以獲得故障檢測指標,即二次統計量。由于懸浮系統中部分數據呈非高斯分布導致二次統計量也呈非高斯分布的問題,使用Box-Cox變換將每種類別下建立的二次統計量轉換為高斯分布變量,并利用高斯分布的置信區間來確定異常閾值。實驗結果表明,本文方法能有效檢測出4類異常,而且與基于K-medoids的方法和基于SVDD的方法相比,能更有效地檢測出4類異常。
本文方法的貢獻主要有:
(1)利用懸浮系統的多維健康數據,提出了一種基于改進的CCA的多維時間序列異常檢測方法,該方法對4類異常的檢測率都在96%以上。
(2)使用Box-Cox變換將每種類別下建立的二次統計量轉換為高斯分布變量,解決了呈非高斯分布的二次統計量導致傳統閾值設定不合理的問題。
作者貢獻聲明:
王平:算法研究的執行人,構造新的算法,完成數據分析和實驗驗證、論文初稿的寫作。
梅子:數據分析,論文寫作與修改。
龍志強:研究的構思者及負責人。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
