基于平方根形式的無跡卡爾曼粒子濾波的電力系統(tǒng)動態(tài)估計
2022-03-25 01:44:00李曉亮劉治國
河北電力技術(shù) 2022年1期
李 明,王 凱,李曉亮,劉治國
(國網(wǎng)河北省電力有限公司館陶供電分公司,河北 邯鄲 057750)
0 引言
隨著社會的不斷發(fā)展,分布式電源、風(fēng)能、太陽能等新能源不斷接入,對電力系統(tǒng)穩(wěn)定性的要求越來越高。為了提高電力系統(tǒng)的穩(wěn)定性,必須提高電力系統(tǒng)調(diào)度、控制、安全評估等方面的能力。電力系統(tǒng)動態(tài)估計是電力系統(tǒng)調(diào)度、控制、安全評估的基礎(chǔ),動態(tài)估計通過狀態(tài)預(yù)測能對電力系統(tǒng)進(jìn)行安全評估,實現(xiàn)經(jīng)濟調(diào)度、預(yù)防控制等在線功能,重要性不言而喻,鑒于此,必須快速、準(zhǔn)確地對電力系統(tǒng)進(jìn)行動態(tài)估計。
20世紀(jì)70年代初,Debs等人提出了卡爾曼濾波算法,并用最簡單的系統(tǒng)模型建立動態(tài)狀態(tài)估計,卡爾曼濾波處理的是線性問題,而電力系統(tǒng)的動態(tài)估計屬于非線性問題,此方法的狀態(tài)估計精度低。然后引出了擴展的卡爾曼濾波算法[1- 2](EKF),擴展的卡爾曼濾波算法處理非線性系統(tǒng)的思想是將非線性函數(shù)在估計點附近進(jìn)行泰勒級數(shù)展開,并用一個等價于常規(guī)卡爾曼濾波方程的近似矩陣來代替非線性函數(shù)。此方法的估計精度較低,然后又引入了無跡卡爾曼濾波算法[3-5](UKF))來進(jìn)行狀態(tài)估計,無跡卡爾曼濾波也是最小方差估計器,核心思想是無跡變換。如將非線性方程采用泰勒級數(shù)展開式表達(dá),可以看出無跡卡爾曼濾波算法能夠精確到與三階泰勒級數(shù)展開式相當(dāng)?shù)木岛头讲睢?/p>
但EKF和UKF都是針對非線性系統(tǒng)的線性卡爾曼濾波方法的變形和改進(jìn),因此受線性卡爾曼濾波算法的條件制約。粒子濾波[6-9](PF)能夠很好的進(jìn)行非線性系統(tǒng)的狀態(tài)估計,在一定程度上提高了狀態(tài)估計精度,但是PF選擇轉(zhuǎn)移概率密度作為重要性密度函數(shù),在計算重要性概率密度函數(shù)時沒有考慮到最新的量測信息[10],當(dāng)預(yù)測先驗與似然函數(shù)重疊少或者量測模型密度較高時,可能偏離真實的后驗分布,導(dǎo)致粒子濾波存在著退化現(xiàn)象和粒子匱乏問題。傳統(tǒng)動態(tài)估計方法在含有間歇性、波動性較強的新能源系統(tǒng)中,適應(yīng)能力和穩(wěn)定性較差,狀態(tài)估計精度較低。
針對這些問題,引入了無跡卡爾曼粒子濾波的算法[1114](UPF),UPF在非線性或者非高斯分布的貝葉斯估計等方面得到了很好的應(yīng)用,可以有效解決狀態(tài)估計問題。
基于電力系統(tǒng)動態(tài)估計,提出了平方根形式的無跡卡爾曼粒子濾波(SR-UPF)的狀態(tài)估計方法,無跡卡爾曼濾波作為概率密度函數(shù)引入到粒子濾波中可以有效解決粒子濾波中存在的退化現(xiàn)象,在粒子濾波過程中,使用Mar kov鏈蒙特卡羅方法保持粒子的多樣性,有效解決了粒子匱乏的問題,本方法還保障了濾波收斂速度和穩(wěn)定性,能夠很好的應(yīng)用在含有新能源接入的電力系統(tǒng)中。為了減少計算時間,本文還適當(dāng)?shù)臏p少了粒子個數(shù),并通過IEEE 14節(jié)點系統(tǒng)進(jìn)了仿真驗證,表明SR-UPF在不犧牲大量計算時間的情況下,可以有效提高狀態(tài)估計的精度。
1 電力系統(tǒng)動態(tài)狀態(tài)估計模型
對于電力系統(tǒng)動態(tài)狀態(tài)估計問題,非線性系統(tǒng)的動態(tài)模型和量測模型表達(dá)如下

式中:Xk為k時刻的n維狀態(tài)向量,Xk=[Vk,θk]∈Rn為節(jié)點電壓的幅值和相角;Zk為k為時刻的m維量測向量,Zk=[Pk,Qk,Vk,θk]∈Rm為節(jié)點的有功功率、無功功率、電壓的幅值和相角等;f(·)為k-1時刻的狀態(tài)向量轉(zhuǎn)移函數(shù);h(·)為k時刻的量測方程,量測模型采用混合量測;qk~N( 0 ,Qk)為系統(tǒng)噪聲;rk+1~N( 0 ,Rk+1)為量測噪聲。
動態(tài)估計的基本原理:假設(shè)在k-1時刻已經(jīng)求的狀態(tài)估計向量X^k-1,要求在量測到k時刻量測量Zk后,求出該時刻的狀態(tài)向量X^k,估計的準(zhǔn)則是以狀態(tài)向量估計誤差方差陣Pkk最小為目標(biāo)函數(shù),即

式中:ekk=Xk-X^k=Xk-Xkk,Xk,為k時刻狀態(tài)變量的真值,X^k=Xkk為k的狀態(tài)估計值。
2 改進(jìn)SR-UPF的電力系統(tǒng)動態(tài)狀態(tài)估計
為提高動態(tài)估計的精度,解決粒子濾波中存在的粒子退化現(xiàn)象和粒子匱乏問題,在粒子濾波中加入了重采樣和選擇合理的建議密度來解決上述問題。無跡卡爾曼濾波非常適合做建議密度函數(shù),所以導(dǎo)出了無跡卡爾曼粒子濾波的電力系統(tǒng)動態(tài)估計。
UKF改進(jìn)的粒子濾波算法的核心在于,在采樣階段,可以利用UKF算法為每個粒子計算其均值和協(xié)方差,然后利用該均值和方差來指導(dǎo)采樣。在基本的粒子濾波的基礎(chǔ)上還加入了利用Markov鏈蒙特卡羅方法保持重采樣后粒子的多樣性。最后提出SR-UPF的電力系統(tǒng)動態(tài)估計,保障了狀態(tài)估計的穩(wěn)定性,有效提高了狀態(tài)估計精度。
2.1 粒子初始化
在粒子濾波的電力系統(tǒng)動態(tài)狀態(tài)估計中,需要對代表電網(wǎng)節(jié)點狀態(tài)的粒子進(jìn)行初始化。在對粒子進(jìn)行初始化時,如果已有電網(wǎng)節(jié)點的狀態(tài)量,則以節(jié)點狀態(tài)量為均值,符合高斯分布來產(chǎn)生粒子集合;如果不知道電網(wǎng)節(jié)點的狀態(tài)量,則在可能的狀態(tài)量范圍內(nèi)產(chǎn)生均勻分布的粒子集合。
粒子數(shù)量N由要求的計算精度和計算資源決定,理論上N越大,得到的估計越準(zhǔn)確,當(dāng)N趨于無窮時,能準(zhǔn)確估計電網(wǎng)狀態(tài);但N越大,計算量越大計算時間也越長,應(yīng)根據(jù)所需計算速度和計算精度選擇合適的粒子數(shù)量。初始化時每個粒子所有節(jié)點權(quán)重都賦等值。

式中:ωmk代表k時刻m粒子的權(quán)重。
2.2 UKF更新粒子
2.2.1 UT變換
2.2.2 UT變換的采樣方法

2.2.3 利用Mar kov鏈蒙特卡羅方法保持粒子多樣性

2.3 基于SR-UPF的電力系統(tǒng)動態(tài)估計


圖1 SR-UPF的動態(tài)狀態(tài)估計流程


步驟5,粒子分裂,進(jìn)行權(quán)值調(diào)整并歸一化。
步驟7,利用Mar kov鏈蒙特卡羅方法保持重采樣后粒子的多樣性對更新后的粒子進(jìn)行權(quán)重歸一化,得到粒子最新權(quán)重ωi(k)。
步驟8,計算得到電力系統(tǒng)的狀態(tài)估計值,計算公式如下

步驟9,判斷是否達(dá)到終止條件,滿足則終止,否則,k=k+1,返回步驟3計算下一時刻狀態(tài)估計值。
3 算例分析
使用均方根誤差(Root mean square error,RMSE)作為性能指標(biāo)函數(shù)。k時刻的均方根誤差公式為

本文在IEEE 14節(jié)點系統(tǒng)上進(jìn)行了數(shù)值試驗。在此系統(tǒng)中節(jié)點3和節(jié)點5為分布式電源,仿真中以系統(tǒng)潮流計算結(jié)果為真值,量測數(shù)據(jù)通過在測試系統(tǒng)潮流結(jié)果的基礎(chǔ)上疊加相應(yīng)的正態(tài)分布隨機量測誤差而形成,其中SCADA系統(tǒng)量測誤差的標(biāo)準(zhǔn)差是0.02,均值為0;PMU電壓幅值量測誤差的標(biāo)準(zhǔn)差為0.005,均值為0,相角量測誤差的標(biāo)準(zhǔn)差為0.002,均值為0;粒子更新所用到的靜態(tài)數(shù)據(jù)參考了文獻(xiàn)[7]。UPF中的參數(shù)選擇:k=0,β=2,α=0.01,粒子個數(shù)通過試驗選取。
為了研究不同數(shù)量的粒子對本文所提算法狀態(tài)估計精度的影響,在IEEE 14節(jié)點的電力系統(tǒng)進(jìn)行了仿真試驗,仿真結(jié)果如表1所示,其中ξθ代表電壓幅值的均方根誤差,ξv代表電壓相角的均方根誤差。

表1 不同粒子個數(shù)的仿真比較
由表1結(jié)果可得,SR-UPF狀態(tài)估計的精度會隨著粒子數(shù)目的增加而增加,但SR-UPF在提高估計精度的同時存在著計算量不斷增加,計算時間增加的問題,本文在保障估計精度的情況下,盡量減少計算時間,選擇了粒子個數(shù)N為150個。
對于IEEE 14節(jié)點系統(tǒng),表1對幾種算法的性能進(jìn)行了對比,圖2-圖6顯示任意選取節(jié)點1的估計值與真值曲線、整個系統(tǒng)的性能指標(biāo)RMSE和計算時間對比。
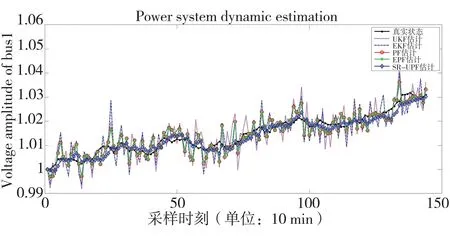
圖2 IEEE 14節(jié)點1的電壓幅值估計值與真值
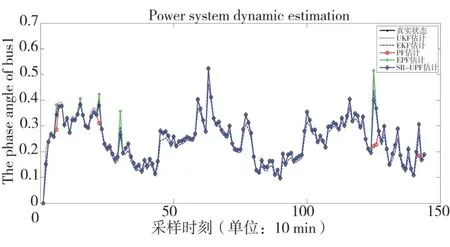
圖3 IEEE 14節(jié)點1的電壓幅值估計值與真值

圖4 IEEE 14幅值估計的RMSE

圖5 IEEE 14相角估計的RMSE

圖6 IEEE 14不同方法的計算時間對比
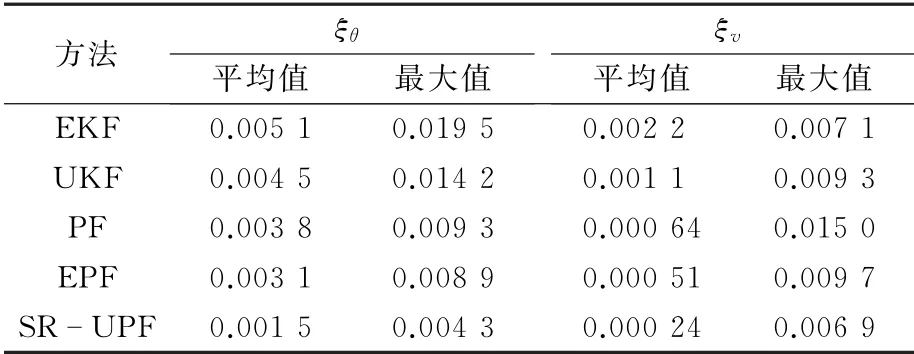
表2 IEEE 14系統(tǒng)中5種算法的性能比較
通過以上仿真結(jié)果表明,本文所提的狀態(tài)估計方法雖然犧牲了少量的計算時間以及在個別采樣點的均方根誤差較大,但是該方法的平均均方根誤差最小,在整體的狀態(tài)估計上表現(xiàn)出巨大的優(yōu)勢。通過以上分析可以得出本文所提的方法可以有效的提高電力系統(tǒng)動態(tài)狀態(tài)估計的精度。
4 結(jié)束語
建立了SR-UPF的狀態(tài)估計方法,經(jīng)過仿真驗證,PF與EKF、UKF算法進(jìn)行比較,PF估計精度有所提高,但是PF存在著粒子退化和匱乏的問題,以上傳統(tǒng)方法在含有間歇性和波動性的新能源電力系統(tǒng)中估計穩(wěn)定性差,精度低。本文所提的SR-UPF方法解決了粒子退化和匱乏的問題,保障了狀態(tài)估計的穩(wěn)定性,有效提高了狀態(tài)估計的精度。但是SR-UPF與EKF、UKF相比,計算耗費時間略長,對于此問題接下來還需要繼續(xù)研究。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年24期)2015-04-09 12:04:36
