凝汽器汽側(cè)和水側(cè)聯(lián)通管仿真研究
2022-03-26 07:37:16宋柯
電子元器件與信息技術(shù) 2022年1期
宋柯
(武漢市瑞思信息技術(shù)有限公司,湖北 武漢 430000)
0 引言
凝汽器是核電站二回路最大的熱量中轉(zhuǎn)站,其穩(wěn)定高效的運(yùn)行為機(jī)組的安全及經(jīng)濟(jì)性提供了保障。凝汽器的功能主要為將汽輪機(jī)的排汽冷凝成水供蒸汽發(fā)生器重新使用,以及在汽輪機(jī)排汽處建立真空和維持真空[1-4]。一般地,核電廠汽輪機(jī)由二個(gè)或三個(gè)低壓缸組成,每個(gè)低壓缸均連接一臺(tái)凝汽器。多臺(tái)結(jié)構(gòu)和參數(shù)相同的獨(dú)立殼體冷凝器在汽側(cè)和水側(cè)各有聯(lián)通管相聯(lián),用于保證各臺(tái)凝汽器的真空度基本一致,即保證各低壓缸的背壓基本一致,從而保證各汽輪機(jī)低壓缸轉(zhuǎn)子的出力均衡。
在對(duì)核電站凝汽器系統(tǒng)仿真建模的過程中,對(duì)冷凝器汽側(cè)和水側(cè)聯(lián)通管功能模擬的逼真度直接影響著對(duì)核電站二回路特性的模擬效果。
本文采用中核武漢核電運(yùn)行技術(shù)股份有限公司RINSIM仿真平臺(tái)[5-6],使用凝汽器部件分別對(duì)由2臺(tái)和3臺(tái)凝汽器組成的凝汽器系統(tǒng)進(jìn)行仿真建模,采用2種不同建模方法對(duì)冷凝器汽側(cè)和水側(cè)聯(lián)通管功能進(jìn)行模擬研究,利用模擬機(jī)在緊急停機(jī)、所有凝汽器真空破壞和喪失所有凝汽器循環(huán)冷卻水3種工況下仿真結(jié)果的對(duì)比分析,比較了2種不同建模方法對(duì)冷凝器汽側(cè)和水側(cè)聯(lián)通管功能模擬的優(yōu)劣。RINSIM仿真平臺(tái)的仿真部件庫中有凝汽器部件,可用于單臺(tái)凝汽器的模擬。多臺(tái)凝汽器之間的聯(lián)通管的模擬一般用圖形化建模流網(wǎng)部件庫中的邊界、節(jié)點(diǎn)和連接管線部件來建模,此方法本文稱流網(wǎng)部件法。此外也可以根據(jù)汽側(cè)和水側(cè)聯(lián)通管功能編寫程序,以質(zhì)量守恒和能量守恒為基礎(chǔ)迭代計(jì)算,實(shí)現(xiàn)多臺(tái)凝汽器汽側(cè)和水側(cè)的動(dòng)態(tài)平衡,此方法本文稱程序法。一般電廠,不管是2臺(tái)還是3臺(tái)凝汽器,它們的壓力和液位基本保持一致,瞬態(tài)變化時(shí)保持同樣趨勢(shì)變化;參考某電廠調(diào)試報(bào)告和培訓(xùn)教案可以確定,在緊急停機(jī)工況下,凝汽器壓力和液位先稍微下降后穩(wěn)定;所有凝汽器在真空破壞工況下,壓力會(huì)上漲至跳機(jī)后最終到常壓,液位稍微上升;在喪失所有凝汽器循環(huán)冷卻水工況下,壓力和液位緩慢上漲。本文通過2種不同建模方法得出的仿真結(jié)果,并通過與真實(shí)變化趨勢(shì)相比較來判斷2種方法的優(yōu)劣,從而選擇更好的建模方法為模擬機(jī)的建造提供更高精度的凝汽器系統(tǒng)模型。
1 仿真模型
在正常工況和瞬態(tài)工況下,當(dāng)各低壓缸排汽、抽汽、疏水不一致,凝汽器系統(tǒng)的各凝汽器之間的汽側(cè)和水側(cè)質(zhì)量和能量會(huì)出現(xiàn)不平衡的現(xiàn)象,這時(shí)冷凝器汽側(cè)和水側(cè)聯(lián)通管由于兩端壓差會(huì)出現(xiàn)汽、水的流動(dòng),從而起到平衡各凝汽器之間的汽側(cè)和水側(cè)壓力的作用。聯(lián)通管內(nèi)流動(dòng)是一種非穩(wěn)態(tài)流動(dòng),使各凝汽器之間實(shí)現(xiàn)動(dòng)態(tài)平衡,從而保證汽輪機(jī)各低壓缸背壓的一致均衡[7-10]。在RINSIM仿真平臺(tái)上對(duì)流網(wǎng)管線模擬時(shí),管線存在節(jié)點(diǎn)和邊界。節(jié)點(diǎn)是一種假設(shè)介質(zhì)均勻混合的介質(zhì)流空間,邊界是參數(shù)獨(dú)立變化的介質(zhì)空間,用來連接凝汽器內(nèi)參數(shù),邊界與節(jié)點(diǎn)連接形成管線,用來平衡各凝汽器的汽側(cè)和水側(cè),使2臺(tái)凝汽器的壓力液位保持基本一致。程序法是通過兩兩凝汽器的汽側(cè)和水側(cè)質(zhì)量和能量平均值迭代計(jì)算實(shí)現(xiàn)凝汽器之間的動(dòng)態(tài)平衡。
1.1 流網(wǎng)部件法算法
圖1為流網(wǎng)管道的簡化模型, 和 表示模擬管道節(jié)點(diǎn), 表示兩節(jié)點(diǎn)間流量。
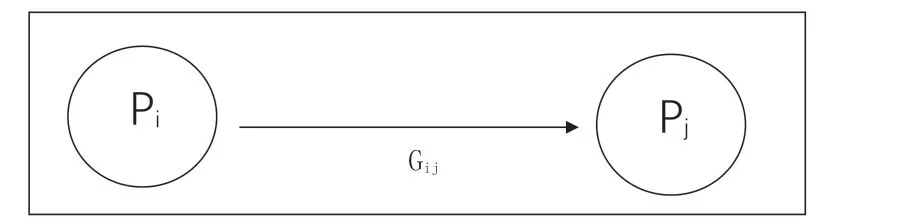
圖1 管道 i -j
各守恒方程如下:
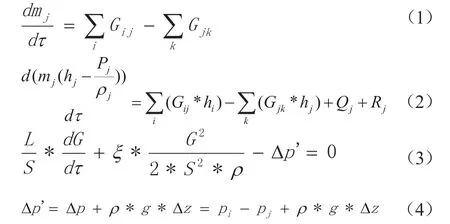
流量流向?yàn)閕→j;m為節(jié)點(diǎn)質(zhì)量;G為管道流量;τ為時(shí)間步長;L為管道長度;h為節(jié)點(diǎn)比焓;p為節(jié)點(diǎn)壓力;ρ為節(jié)點(diǎn)介質(zhì)密度;Q為外熱源;R為內(nèi)熱源;S為管道橫截面積;ξ為水力摩擦系數(shù); 為管道壓降; 為管道前后節(jié)點(diǎn)高差;
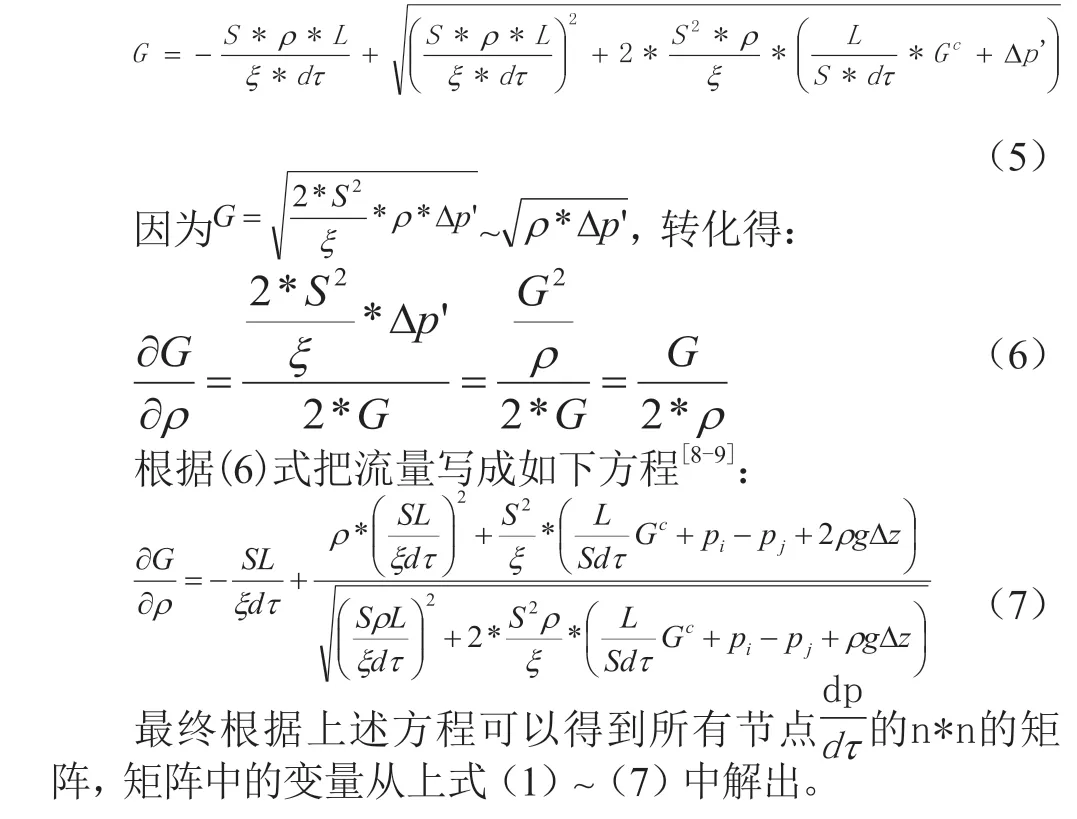
由動(dòng)量方程(3)求出管線流量,此為流量G的一元二次方程:
1.2 程序法算法
算出所有凝汽器的質(zhì)量平均值,質(zhì)量平衡則是本身質(zhì)量加上計(jì)算頻率內(nèi)的凈質(zhì)量;能量平衡則是計(jì)算質(zhì)量平衡后汽側(cè)或水側(cè)凝汽器的焓值;
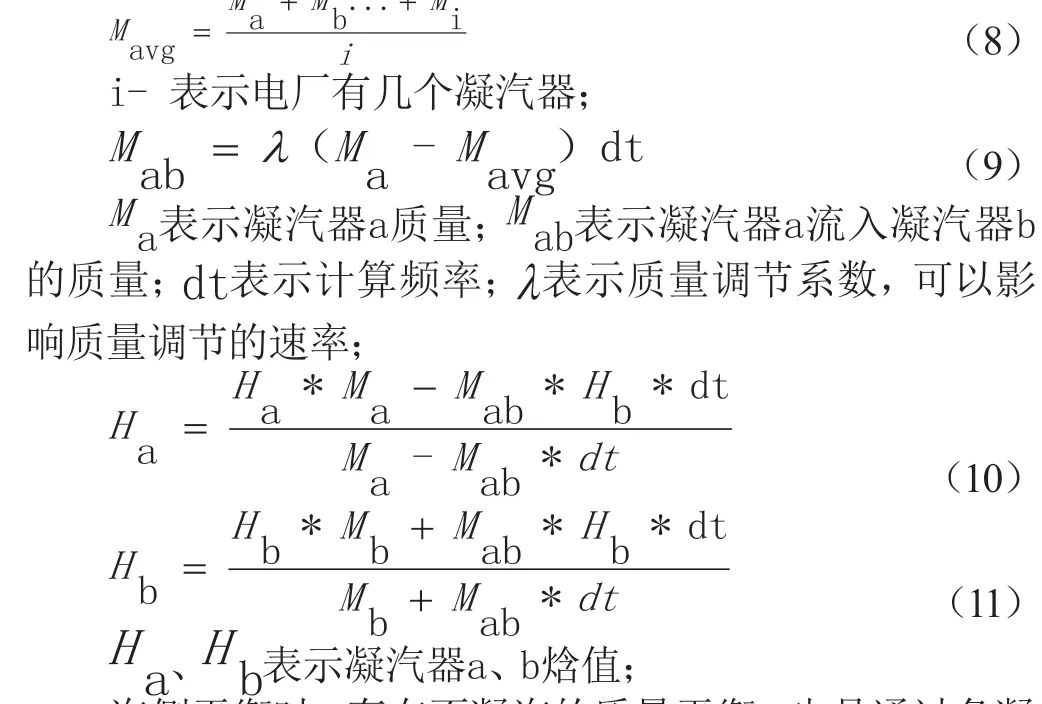
汽側(cè)平衡時(shí),存在不凝汽的質(zhì)量平衡,也是通過各凝汽器內(nèi)不凝汽質(zhì)量計(jì)算出不凝汽平衡,從而達(dá)到汽側(cè)不凝汽平衡。
1.3 凝汽器模型輸入?yún)?shù)
參考某電廠凝汽器數(shù)據(jù)在RINSIM仿真平臺(tái)上使用該平臺(tái)凝汽器部件模擬電廠凝汽器系統(tǒng),分別模擬2臺(tái)凝汽器部件和3臺(tái)凝汽器部件的系統(tǒng),并且在RINSIM流網(wǎng)管線建立2臺(tái)和3臺(tái)凝汽器部件之間的汽側(cè)和水側(cè)平衡管線;凝汽器數(shù)據(jù)如表1所示。
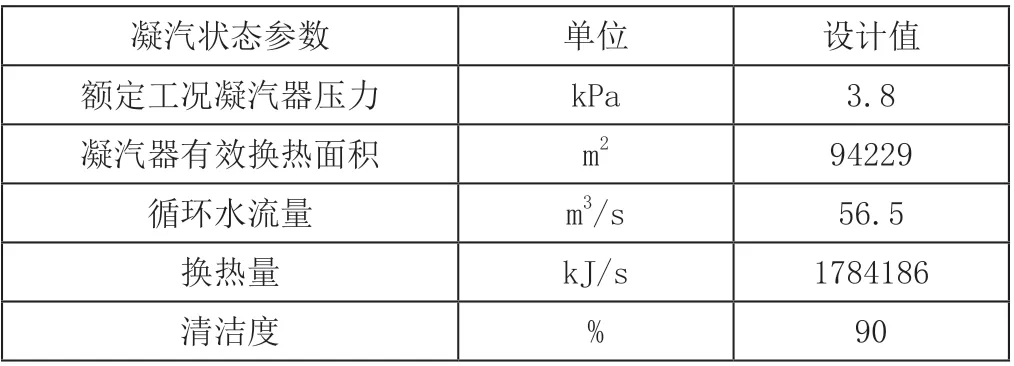
表1 凝汽器參數(shù)
液位參數(shù)按照電廠運(yùn)行經(jīng)驗(yàn)穩(wěn)定在800~900mm之間。
凝汽器系統(tǒng)按照參數(shù)調(diào)節(jié)完成。對(duì)于流網(wǎng)部件法,本文利用RINSIM仿真平臺(tái)圖形化建模工具進(jìn)行汽側(cè)和水側(cè)的聯(lián)通管建模。對(duì)于程序法,利用2.2節(jié)的算法程序模擬汽側(cè)和水側(cè)的聯(lián)通管功能。
2 仿真結(jié)果及分析
2.1 不同瞬態(tài)下3臺(tái)凝汽器參數(shù)對(duì)比
通過模擬電廠停機(jī)、所有凝汽器喪失真空和所有凝汽器喪失循環(huán)水的特殊工況,監(jiān)視3臺(tái)凝汽器的壓力和液位,判斷3臺(tái)凝汽器的汽、水平衡是否穩(wěn)定。
圖2和圖3分別是停機(jī)工況下兩種方法模擬3臺(tái)凝汽器平衡管線壓力和液位的表現(xiàn),上下比較發(fā)現(xiàn)相較于程序法,流網(wǎng)法中3臺(tái)凝汽器壓力波動(dòng)明顯,且液位趨勢(shì)明顯不一致。
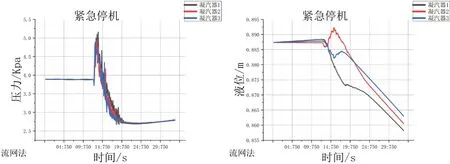
圖2 停機(jī)工況下3 臺(tái)凝汽器的壓力和液位變化(流網(wǎng)法)
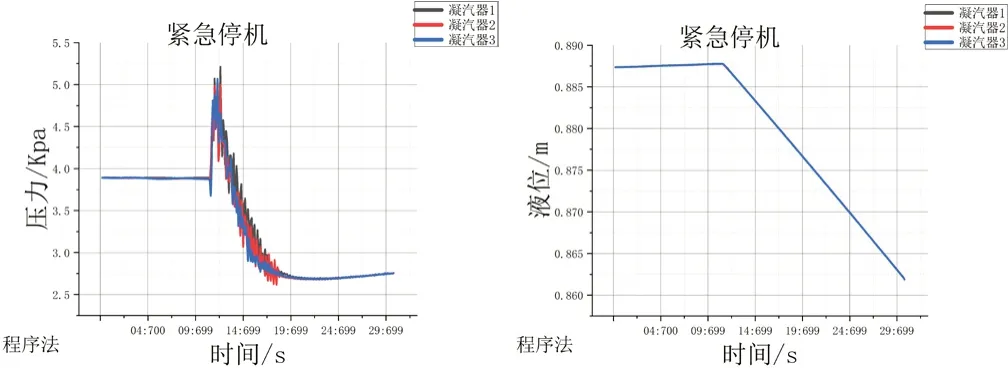
圖3 停機(jī)工況下3 臺(tái)凝汽器的壓力和液位變化(程序法)
圖4和圖5為所有凝汽器喪失循環(huán)水工況下兩種方法在3臺(tái)凝汽器模擬中的比較;上下比較兩種方法壓力變化一致;流網(wǎng)法中3臺(tái)凝汽器液位的變現(xiàn)趨勢(shì)直接發(fā)散,最終很難平衡穩(wěn)定,程序法中液位變化一致且穩(wěn)定。
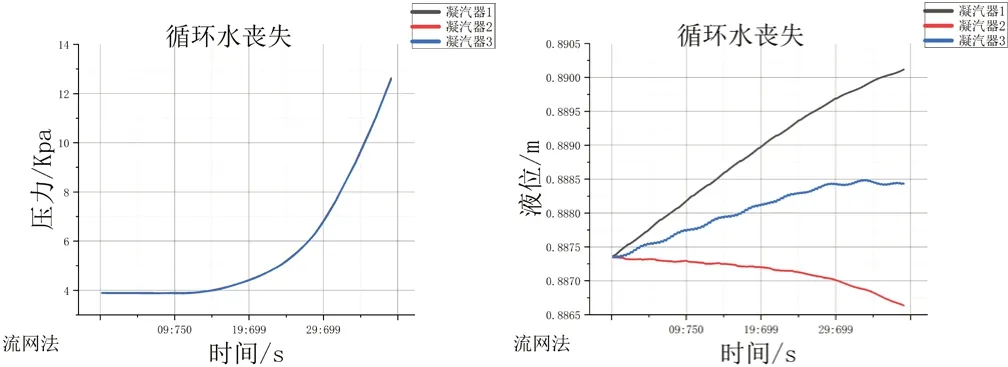
圖4 所有循環(huán)水喪失工況下3 臺(tái)凝汽器的壓力和液位變化(流網(wǎng)法)
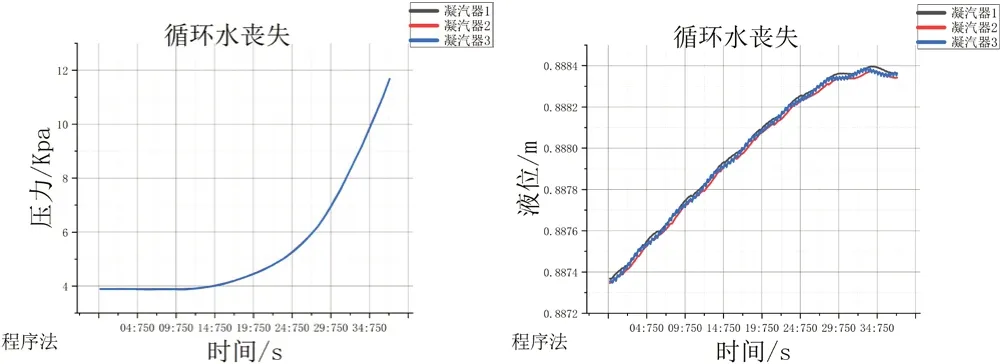
圖5 所有循環(huán)水喪失工況下3 臺(tái)凝汽器的壓力和液位變化(程序法)
圖6和圖7為所有真空閥破壞工況下兩種方法在3臺(tái)凝汽器模擬中的比較;流網(wǎng)法模擬3臺(tái)凝汽器平衡管線表現(xiàn)的壓力和液位都不平衡,3號(hào)凝汽器變化有明顯區(qū)別;程序法3臺(tái)凝汽器的壓力和液位一致變化。
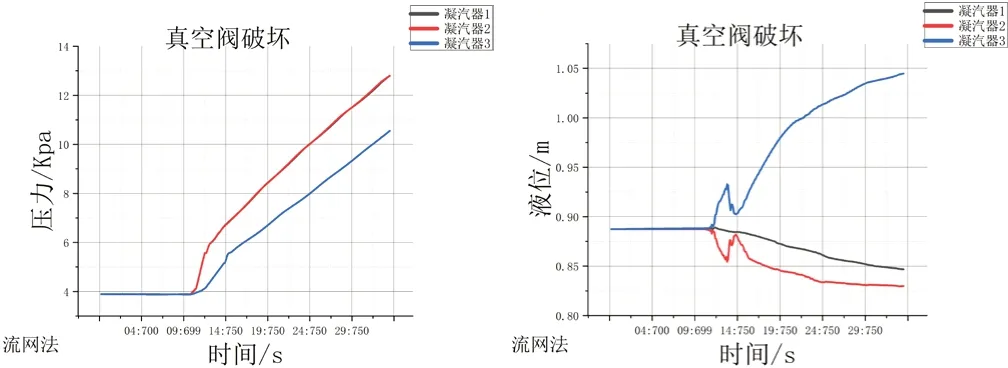
圖6 所有真空閥破壞工況下3 臺(tái)凝汽器的壓力和液位變化(流網(wǎng)法)
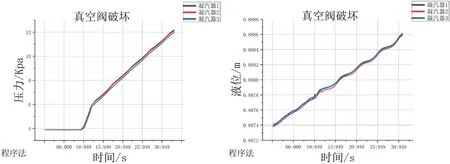
圖7 所有真空閥破壞工況下3 臺(tái)凝汽器的壓力和液位變化(程序法)
2.2 模擬2臺(tái)凝汽器參數(shù)比較
同樣通過模擬電廠緊急停機(jī)、所有凝汽器喪失真空和所有凝汽器喪失循環(huán)水的特殊工況,監(jiān)視是2臺(tái)凝汽器的壓力和液位。
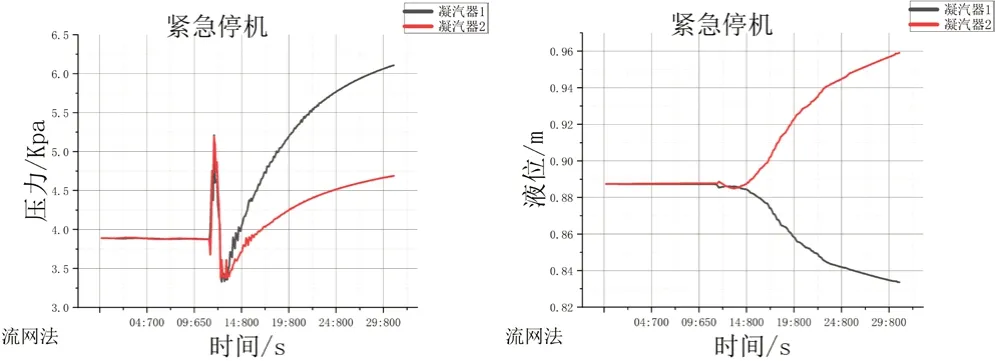
圖(8) 停機(jī)工況下2 臺(tái)凝汽器的壓力和液位變化(流網(wǎng)法)
圖8和圖9為停機(jī)工況下兩種方法的比較;上下比較兩種方法模擬2臺(tái)凝汽器平衡管線,所表現(xiàn)的壓力都有發(fā)散變化,但是程序法時(shí)間拉長最終收斂,流網(wǎng)法是持續(xù)發(fā)散不會(huì)平衡;流網(wǎng)法2臺(tái)凝汽器液位直接發(fā)散變化,程序法則保持一致。
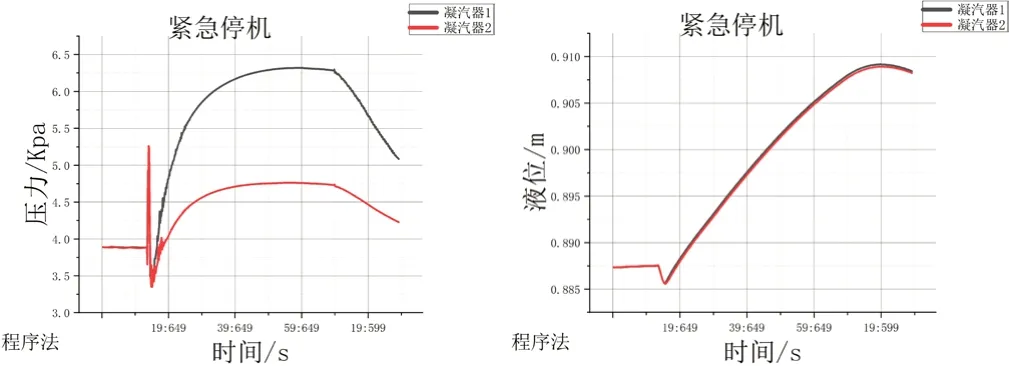
圖9 停機(jī)工況下2 臺(tái)凝汽器的壓力和液位變化(程序法)
圖10和圖11為所有凝汽器喪失循環(huán)水工況下兩種方法的比較;上下比較兩種方法表現(xiàn)的壓力變化一致;流網(wǎng)法2臺(tái)凝汽器液位慢慢發(fā)散;程序法液位保持一致變化。
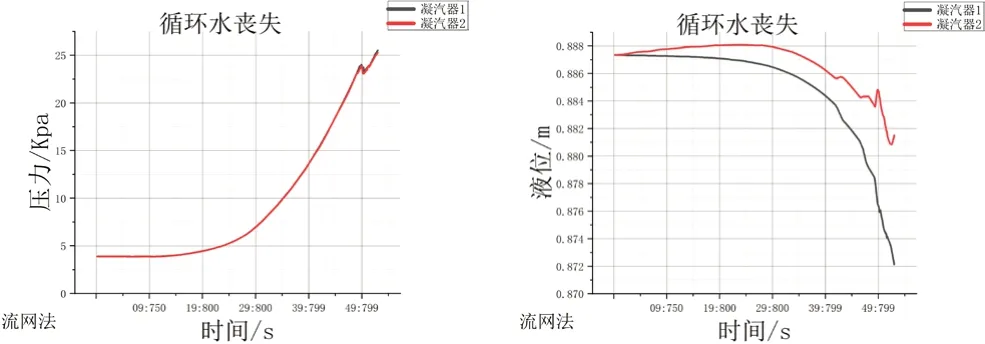
圖10 所有循環(huán)水喪失工況下2 臺(tái)凝汽器的壓力和液位變化(流網(wǎng)法)
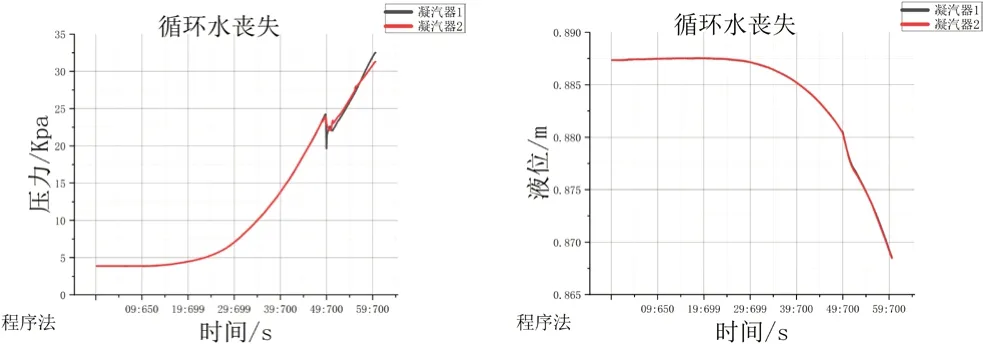
圖11 所有循環(huán)水喪失工況下2 臺(tái)凝汽器的壓力和液位變化(程序法)
圖12和圖13為所有真空閥破壞工況下兩種方法的比較;上下比較發(fā)現(xiàn),流網(wǎng)法模擬2臺(tái)凝汽器平衡管線表現(xiàn)的壓力和液位都不平衡,且2臺(tái)凝汽器壓力和液位都程發(fā)散變化;程序法3臺(tái)凝汽器的壓力和液位一致變化。
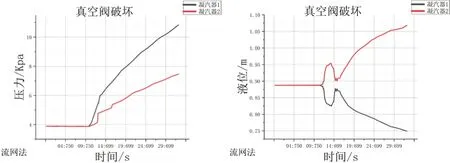
圖12 所有真空閥破壞工況下兩個(gè)個(gè)凝汽器的壓力和液位變化(流網(wǎng)法)
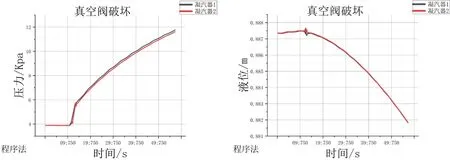
圖13 所有真空閥破壞工況下兩個(gè)個(gè)凝汽器的壓力和液位變化(程序法)
2.3 結(jié)果分析
圖2~13是監(jiān)視凝汽器在三種大瞬態(tài)工況下的壓力和液位變化;通過壓力和液位變化判斷各凝汽器之間的汽側(cè)和水側(cè)平衡是否穩(wěn)定,確定程序法更能模擬出穩(wěn)定的凝汽器模型。
流網(wǎng)模擬平衡管線時(shí),為滿足平衡管線平衡兩邊凝汽器汽、水間的工藝要求,需要把管線的導(dǎo)納系數(shù)設(shè)置很大,假定管線流阻很小,來模擬實(shí)際電廠中的汽、水平衡管線;只要存在很小的壓差,管線就會(huì)計(jì)算質(zhì)量和能量,管線一直處于動(dòng)態(tài)平衡狀態(tài);穩(wěn)態(tài)時(shí)各凝汽器的壓力和液位變化很小,動(dòng)態(tài)平衡可以維持,但是瞬態(tài)工況下每個(gè)凝汽器由各接口的輸入輸出存在不一致,壓力和液位變化較大,流網(wǎng)管線內(nèi)的質(zhì)量流量和壓力變化幅度很大,流網(wǎng)計(jì)算就會(huì)存在不平衡,導(dǎo)致各凝汽器狀態(tài)變化不一致;程序法的本質(zhì)就是質(zhì)量平衡,相當(dāng)于將2臺(tái)或3臺(tái)凝汽器看成一個(gè)整體去內(nèi)部計(jì)算,這樣更能保證凝汽器之間的穩(wěn)定。
模擬2臺(tái)凝汽器的汽、水平衡瞬態(tài)變化時(shí),相比于3臺(tái)凝汽器的汽、水平衡比較容易引起不平衡;2臺(tái)凝汽器的平衡管線更容易不平衡是因?yàn)椴黄胶馐莾蓛捎绊懀@種影響只會(huì)讓不平衡發(fā)散;而3臺(tái)凝汽器平衡管線中,1個(gè)凝汽器是由2臺(tái)凝汽器的計(jì)算偏執(zhí)影響,相對(duì)而言震蕩沒有兩兩惡性循環(huán)明顯。
各凝汽器壓力和液位變化在兩種模擬方法下表現(xiàn)趨勢(shì)基本一致,且與電廠數(shù)據(jù)趨勢(shì)相同,但程序法模擬的平衡管線讓各凝汽器表現(xiàn)狀態(tài)更加穩(wěn)定一致。
3 結(jié)語
本文通過主流流網(wǎng)計(jì)算方法和質(zhì)量能量平衡程序方法分別模擬2臺(tái)和3臺(tái)凝汽器部件汽、水平衡,相比較而言主流流網(wǎng)計(jì)算方法在計(jì)算極限壓差和管線流導(dǎo)時(shí)會(huì)存在偏差,質(zhì)量能量平衡程序的方法在各瞬態(tài)極限工況下能比較穩(wěn)定地反映凝汽器各相狀態(tài),滿足實(shí)際電廠對(duì)凝汽器工藝現(xiàn)象要求,從而實(shí)現(xiàn)模擬仿真的目標(biāo)。
猜你喜歡
設(shè)備管理與維修(2022年21期)2022-12-28 07:34:32
水泵技術(shù)(2022年2期)2022-06-16 07:08:18
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動(dòng)化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
電站輔機(jī)(2016年3期)2016-05-17 03:52:29
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:41
機(jī)械制造文摘(焊接分冊(cè))(2014年6期)2014-03-20 13:57:47
自動(dòng)化博覽(2014年12期)2014-02-28 22:34:27
原子能科學(xué)技術(shù)(2014年1期)2014-02-28 22:16:56
