結合測速測距的衛星定位法研究
2022-03-26 02:48:52劉天琦
鐵路通信信號工程技術 2022年3期
劉天琦,張 浩,焦 名
(1.北京全路通信信號研究設計院集團有限公司,北京 100070;2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
1 概述
青藏鐵路線路較長,且沿線自然環境惡劣、大量布置軌道電路和應答器的建設成本和設備維護成本較高[1],采用基于衛星定位導航的列車實時定位技術具有明顯優勢,該技術可以減少區間實體地面設備的部署數量[2],同時可以提高列車實時定位的精度,因此衛星定位技術的引入對青藏鐵路列車運行控制系統中列車安全定位具有重要意義。本文重點介紹在列車經過道岔的情況下由于道岔定反位狀態的變化可能導致的衛星定位結果定錯軌道問題,據此提出了與車載測速測距模塊結合的列車連續定位方案,能夠較好解決列車過道岔時的定位問題。
2 線路電子地圖
線路電子地圖是青藏鐵路中車載設備用于衛星定位和運行的基礎數據[3],主要包括軌道地理信息數據和固定應用數據兩種文件,其中軌道地理信息數據涵蓋了衛星定位經緯度數據與軌道位置數據間的對應關系,固定應用數據包含區間和站內的應答器(包含實體應答器和虛擬應答器)、車站內道岔、管轄邊界信息。固定應用數據是車載設備在區間和站內判斷所處軌道,以及觸發虛擬應答器報文的依據。同時,應答器中的數據是車載設備運行所需的基礎數據。
線路電子地圖覆蓋本臨時限速服務器(Temporary Speed Restriction Server,TSRS)管轄范圍,并向相鄰TSRS延伸一個車站的范圍車站進行劃分,每個TSRS管轄范圍內的軌道地理信息和固定應用數據按車站管轄范圍進行劃分。每個車站對應唯一的軌道地理信息和固定應用數據文件。
電子地圖的軌道地理信息數據存儲的線路衛星定位點可以將偏移在軌道附近的定位點校正至軌道上,從而降低衛星定位信息的誤差,提升列車定位精度。電子地圖包含3種文件。
線路電子地圖索引文件:包含TSRS管轄的每個車站的信息及前后車站的鏈接關系。每個車站的最大、最小經緯度信息用于定位列車當前所在車站。
軌道地理信息文件:主要描述車站管轄范圍索引軌道線路的衛星定位經緯度信息、軌道位置等。將軌道劃分為多個軌道片,每個軌道片用2個經緯度點描述,并表明當前軌道片特性(30 m內唯一軌道),如圖1所示。

圖1 電子地圖軌道及軌道片示意Fig.1 Track and track pieces of E-map
固定應用數據文件:主要描述區間和站內的道岔、應答器和管轄邊界在軌道上的位置以及連接關系,如圖2、3所示。
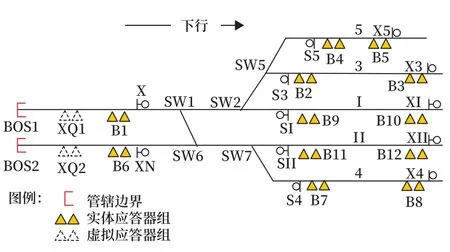
圖2 電子地圖軌道及固定應用設備示意Fig.2 Track and fixed devices of E-map
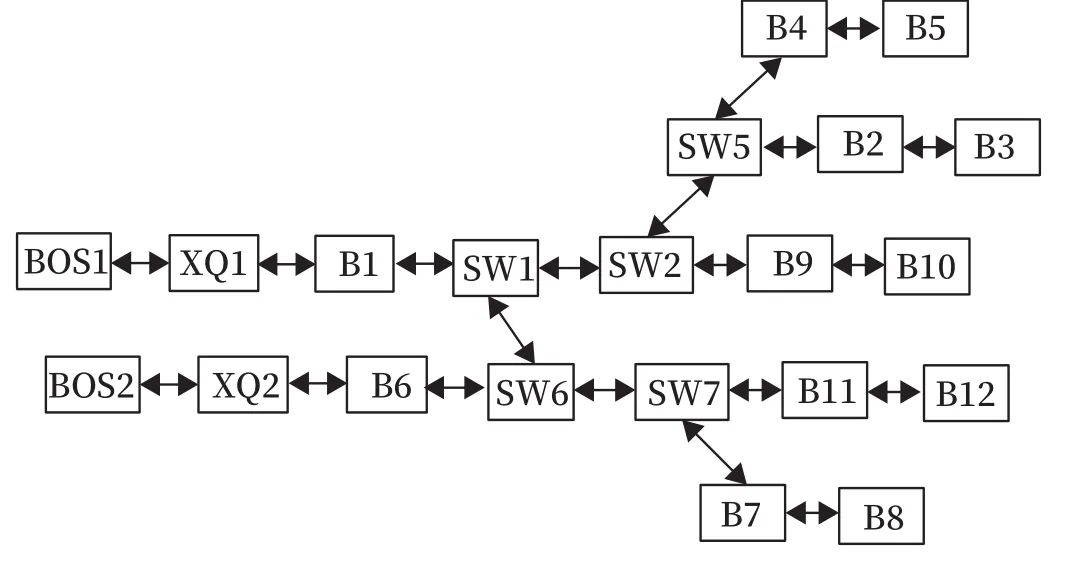
圖3 電子地圖固定應用設備連接示意Fig.3 Linked fixed devices of E-map
3 衛星定位方案
青藏鐵路列車在行駛過程中,會經過大量狹長隧道場景[4]。在完全或者部分遮擋情況下,可能出現可見衛星數目不足或衛星結構分布不良的情況[5],導致衛星接收機計算出的定位數據存在較大誤差,對列車連續定位產生不良影響,因此針對衛星數據的處理十分重要。本章介紹衛星數據的處理過程及定位方案。
3.1 衛星數據預處理
對衛星定位數據進行預處理操作的目的在于濾除部分定位誤差較大的衛星定位數據。本方案將衛星定位數據分為3種狀態,分別為穩定狀態、過渡狀態(非穩定狀態到穩定狀態之間的狀態)以及非穩定狀態。衛星定位數據狀態轉換過程如圖4所示,其中穩定狀態只能由過渡狀態單向轉換得到并且只能單向轉換至非穩定狀態,非穩定狀態與過渡狀態之間可以雙向轉換。
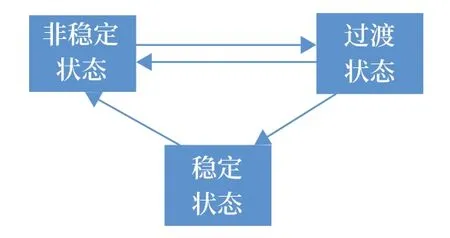
圖4 衛星定位狀態轉換Fig.4 State transition of satellite positioning
衛星定位數據預處理過程如下。
1)判斷當周期衛星定位數據的有效性。定位數據的有效性判定包含其經緯度定位誤差、可見衛星數目、dop值等,當衛星數據滿足所有判定條件時才判定當周期的衛星定位數據有效。
2)結合當周期衛星定位數據的有效性及當前衛星定位狀態,進行狀態轉換。
a.從非穩定狀態到過渡狀態轉換條件:當周期衛星數據有效;
b.從過渡狀態到穩定狀態轉換條件:連續5周期(可配置)衛星數據有效;
c.從過渡狀態到非穩定狀態轉換條件:當周期衛星數據無效;
d.從穩定狀態到非穩定狀態判定條件:連續10周期(可配置)衛星數據無效。
3)當衛星定位狀態處于穩定狀態時認為衛星定位數據可以用于對列車進行定位。
衛星定位狀態轉換過程中的閾值設定應充分考慮衛星定位準確性和可用性,做到在保證至少90%可用性的前提下盡可能精確定位。
3.2 列車連續定位
利用衛星數據進行列車連續定位時,采取垂線匹配算法將有效的衛星定位點定位至電子地圖描述的軌道上[6]。具體方法為從衛星定位點向電子地圖軌道片作垂線,找到當前軌道上垂線最小的軌道片,衛星定位點在該軌道片上的垂足所在位置即為列車定位結果。
在列車完成初始定位后,系統進入列車連續定位階段。在連續定位過程中需要保證相鄰兩周期的列車定位結果不大于在列車周期間隔下的最大行駛距離。垂線匹配算法能夠將定位點收斂至電子地圖軌道區段上,最大行駛距離限制能進一步濾除衛星定位的錯誤,從而提升衛星連續定位的可用性以及定位精度[7]。
列車確認其所在軌道和運行方向后,以最近的相關應答器組(Last Relevant Balise Group,LRBG)作為參考點,按照其軌道位置及運行方向計算列車的相對走行距離,并考慮安全誤差給出車頭位置的置信區間。下一周期的連續列車定位則以前一周期的定位結果作為參考點。
3.3 衛星定位定錯軌道情況
若單純依靠衛星數據來進行列車定位,則在列車經過道岔的場景下,可能出現衛星定位定錯列車所在軌道的情況[8]。
如圖5所示,若列車實際已經運行到道岔的定位軌道上,但衛星定位連續定在已經過道岔的后方(即岔前位置),同時,在列車經過道岔后,道岔狀態由定位轉換至反位,在此種情況下,列車連續定位的結果為道岔反位所在軌道,即發生定錯軌道問題。
在上述情況下,若列車經過一個道岔后觸發實體應答器或LRBG,則衛星定位結果可以被糾正到正確的軌道上,如圖5所示。
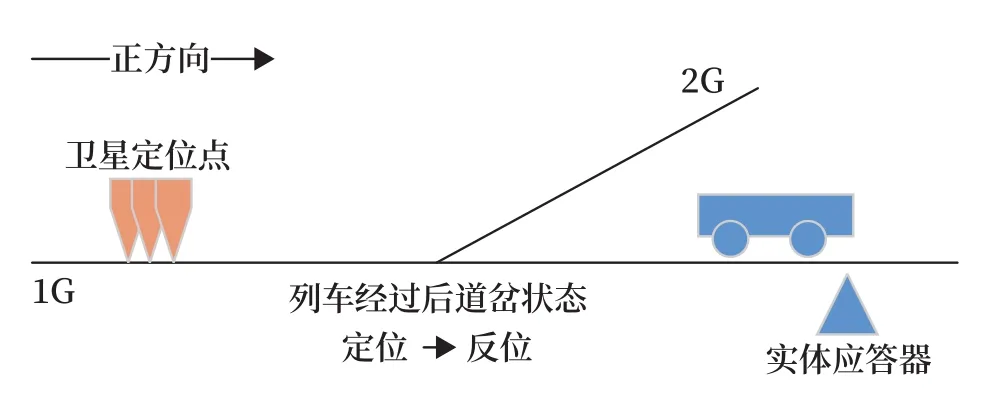
圖5 列車過單個道岔示意Fig.5 A train passing one single switch
若列車經過2個或以上道岔后才觸發實體應答器或LRBG,則存在衛星定位無法檢測情況,根據定位結果無法判斷列車經過2個道岔的正確路徑,如圖6所示。
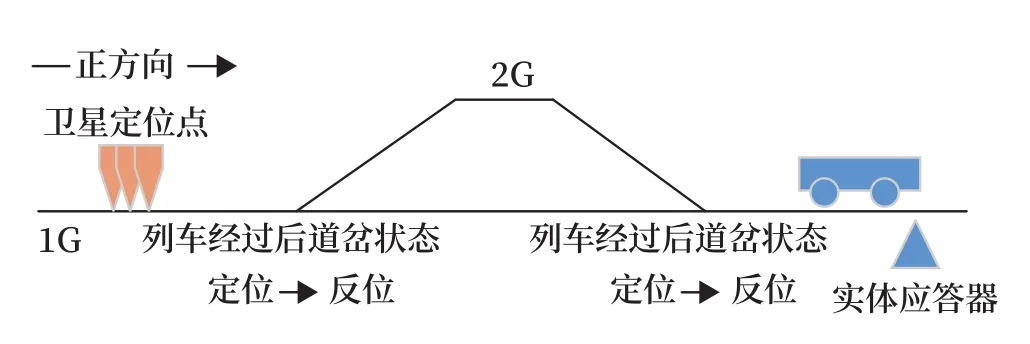
圖6 列車過多個道岔示意Fig.6 A train passing more switches
3.4 已過道岔判定
針對列車經過道岔時若道岔狀態改變可能出現列車定位定錯軌道的情況,本文給出以下解決方案。
添加已過道岔:基于參考LRBG,根據車載測速測距距離信息,向列車行駛正方向進行搜索。若定出的列車位置已經越過道岔,則將鎖定該道岔的定反位狀態并將該道岔設置為已過道岔。
刪除已過道岔:當列車觸發下一個參考LRBG時,認為列車定位在正確的軌道上并且已經找到正確的行駛路徑,將之前保存的已過道岔清空。
在利用衛星數據進行連續列車定位的過程中,根據參考LRBG和車載測速測距信息將道岔劃分為已過道岔和未過道岔兩類。
若當前道岔前后兩周期存在變化,根據上一周期的參考LRBG、測速測距模塊可以判斷列車已經越過該道岔,推算出列車所在軌道與衛星定位結果一致,則說明列車定位在正確的軌道;若判斷上周期列車未越過該道岔,且結合本周期的道岔定反位狀態推算的列車所在軌道與衛星定位結果不一致,則說明列車定位失效,需恢復初始定位狀態,根據當前LRBG正方向重新進行衛星定位。若前后兩周期當前道岔定反位狀態不存在變化,則繼續進行連續定位即可。
當列車經過實體應答器,可以對衛星定位狀態結果進行校驗,并校正測速測距模塊的累計誤差,進一步提高列車定位準確性。
4 總結
本文介紹了一種結合測速測距的衛星定位方法,主要解決了列車在過道岔場景中衛星定位定錯軌道的問題。該方法結合了車輪速度傳感器的短距離內定位準確特性,用于判定列車是否過道岔,確認道岔狀態,解決了衛星定位在道岔處的定位不準確問題。該算法相對通過機器學習等算法判定衛星定位而言,簡單易懂,具有較高的可實施性。
衛星定位系統的應用極大減少青藏鐵路上地面設備的部署數量,顯著降低設備成本及運營維護成本,且可以提供實時的、準確的列車定位信息,對于提升系統的運行效率、安全性和可靠性有重要意義。
