基于用戶體驗的智能駕駛輔助系統應用研究
2022-03-29 09:51:56劉小娜熊松林張昌博李青昊張健姜凌坤
汽車零部件 2022年3期
劉小娜,熊松林,張昌博,李青昊,張健,姜凌坤
(1.陜西萬方汽車零部件有限公司,陜西西安 710600;2.陜西漢德車橋有限公司,陜西西安 710201)
0 引言
隨著全球汽車行業保有量的快速增長,能源短缺、環境污染、交通擁堵、事故頻發等日益突出,成為汽車產業可持續發展的限制因素,汽車產業中長期發展規劃明確提出以智能網聯汽車為突破口,實現汽車產業轉型升級。目前,我國是世界汽車生產大國和銷售大國,到2025年,預計汽車保有量達到3億輛,千人保有量高達210輛。根據英國交通部門統計研究得出超過40%的車禍原因是用戶看不清障礙物和人及注意力不集中導致的車道偏離,目前中國汽車市場有很大的空間,人們對于汽車的功能安全越來越關注,智能駕駛輔助系統在駕駛員遇到緊急情況時,通過控制系統的技術干預,并提供主動支持。
面對城市的復雜路況,以用戶操作行為和體驗為中心,對智能駕駛輔助系統進行了設計研究,提高駕駛員的操作舒適性,文中的研究對降低駕駛事故概率及緩解駕駛員駕駛疲勞等有著重要的意義。
1 智能駕駛輔助系統
智能駕駛輔助系統是通過傳感器對路、車、人、交通標志等進行采集,并通過控制器局域網通信完成信號的傳遞,協助駕駛員安全駕駛,其中包括車道保持輔助系統、自主換道系統及前向碰撞預警系統等。當車輛偏離車道時,車道保持輔助系統會發出警報,通過用戶對車輛的行駛方向進行調整;對于自主換道系統,通過控制算法,判斷是否滿足換道條件,選擇跟馳或自主換道模式,可有效避免人為因素造車的不合理換道,提高安全性和交通效率;前后碰撞預警系統語音或視覺提醒駕駛員注意減速并保持安全距離。
智能駕駛輔助系統為用戶的操作方式做減法,對安全多一層保障,通過該系統,使得用戶—車—行駛環境之間的聯系更加快速和緊密,并減少人在整個系統中的誤操作。用戶的復雜性和不確定性是系統設計中最易忽略的因素,且與汽車的交互體驗是汽車人機關系的重要衡量指標。
2 用戶體驗介紹
從汽車交互設計談起,汽車經歷了機械時期、電氣化時期、半導體電子化時期以及現在的智能網聯化時期。電子時期機械按鍵與操控桿被電子按鍵和旋鈕所代替,提高操作精度;智能網聯化時代的到來,以智能觸屏、語音及手勢等實現便捷化精準操控,交互方式發生了很大的變化,給用戶帶來了全新的交互體驗。
用戶體驗的定義是人們對于使用或參與產品、服務或系統所產生的感知和回應。每一位產品設計師都是產品的第一用戶,提取用戶體驗需求信息的設計要素對產品設計而言有著重要的作用。閆淑德搭建了實車駕駛數據采集平臺,并基于粒子群算法優化BP神經網絡建立駕駛習性的辨識模型,實現個性化換道軌跡規劃。對駕駛輔助系統的設計要素主要包括用戶的操作行為、駕駛習性及交互方式等,應用于產品設計當中。
2.1 用戶操作行為
實際路況中司機的車速、駕齡、性格、行駛時間及駕駛操作習慣與安全駕駛息息相關。駕駛員的操作行為是通過信息獲取及判斷、分析、操作執行等一系列復雜的決策過程,主要包括剎車、油門等縱向運動的操作、轉向橫向運動的操作。
2.2 駕駛習性
駕駛習性反映出不同駕駛員的駕駛習慣和駕駛規律等,不同的駕駛員對于同一工況時的習慣性反映方式及操作方法,有一定的相似及穩定性,文中根據用戶的操作行為分為激進型、適度型和謹慎型3種類型。此外,受外界因素(雨天、擁堵、心情糟糕)的影響,也同樣導致駕駛行為產生隨機性變化。
2.3 交互方式
交互智能是將大數據和人工智能結合起來,使汽車更“懂”用戶。以威馬W6為例進行分析,其配置多樣化交互技術,包括人臉識別、主動疲勞監測,支持自然喚醒、關鍵詞喚醒、快捷指令喚醒等多種交互方式,實現超過120余項常用功能語音控制并支持15 s連續自然語音對話。
3 聯合仿真分析驗證
3.1 換道預警策略模型
換道預警系統輔助駕駛員分析當前復雜路況,判斷車輛縱向及橫向位置,選擇合適時機進行換道,可有效避免駕駛員對換道行為做出錯誤判斷,減少車輛追尾、剮蹭及側向碰撞等事故。目前國內外已經研究出許多獨具特色的換道系統模型,最早是1986年Gipps建立道路換道決策結構框架,在合理駕駛行為條件下模型,以換道過程中的潛在沖突為研究條件,分析交通信號及重型車等對換道過程的影響,后來的研究者根據這個方向,發散出其他換道模型,最典型的案例包括MRS(Multi-Regime Simulation)、MITSIM模型、NETSIM模型、SITRAS模型和南加州大學最小安全距離模型等。
換道的動機主要由駕駛員的特性和外部駕駛環境的刺激兩方面決定,駕駛員的特性包括駕駛習性、最大加減速和忍耐度等;外部駕駛環境的刺激主要是準備換道車輛所在車道和相鄰車道的共同刺激,包括主車以及前車的間距、速度差和前車是否準備換道等因素。
文中主要以駕駛員的特性為主要研究對象,駕駛人的駕駛習性一般分為激進型、適度型和謹慎型,如圖1所示,對于直路換道工況,不同駕駛習性相關參數輸入至Matlab/Simulink-CarSim 聯合仿真平臺搭建個性化換道預警策略模型,匹配個性化換道預警策略,輸出為車輛行駛的相對位移的軌跡。
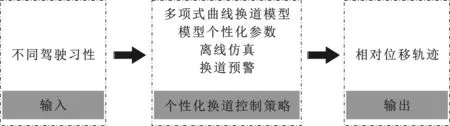
圖1 換道預警策略模型
3.2 模型分析驗證
換道場景路段與車輛相關參數的設定,車道標準寬度=3.5 m,直線段長度30 m,車寬=1.75 m,車長=4.7 m,主車(圖2左側車)與前車(圖2右側車)的相對距離為25 m。以主車車輛的前端為換道起始時刻,基于車輛的行駛和垂直兩個方向上,針對3種駕駛習性以水平和垂直兩個方向分別選用5次多項式來規劃換道軌跡。

(1)
式中:和都是待定參數。
其中=[],=[],分別對()、()求一階導和二階導,可得出車輛在換道過程中的橫縱向速度及加速度,與車輛的水平和垂直的位移關系相結合,可得出車輛目前的狀態函數。
通過 Matlab軟件創建控制策略模型,輸出3種駕駛習性的相對位移軌跡曲線,如圖2所示。在檢測符合安全換道的條件時,將按照符合駕駛習性的相關參數進行換道軌跡規劃,相關參數生成的相對橫向速度和相對縱向速度與時間的關系如圖3所示。在避免碰撞和跟車行駛相關要求的前提下,匹配個性化換道預警策略,提高換道軌跡適應性。
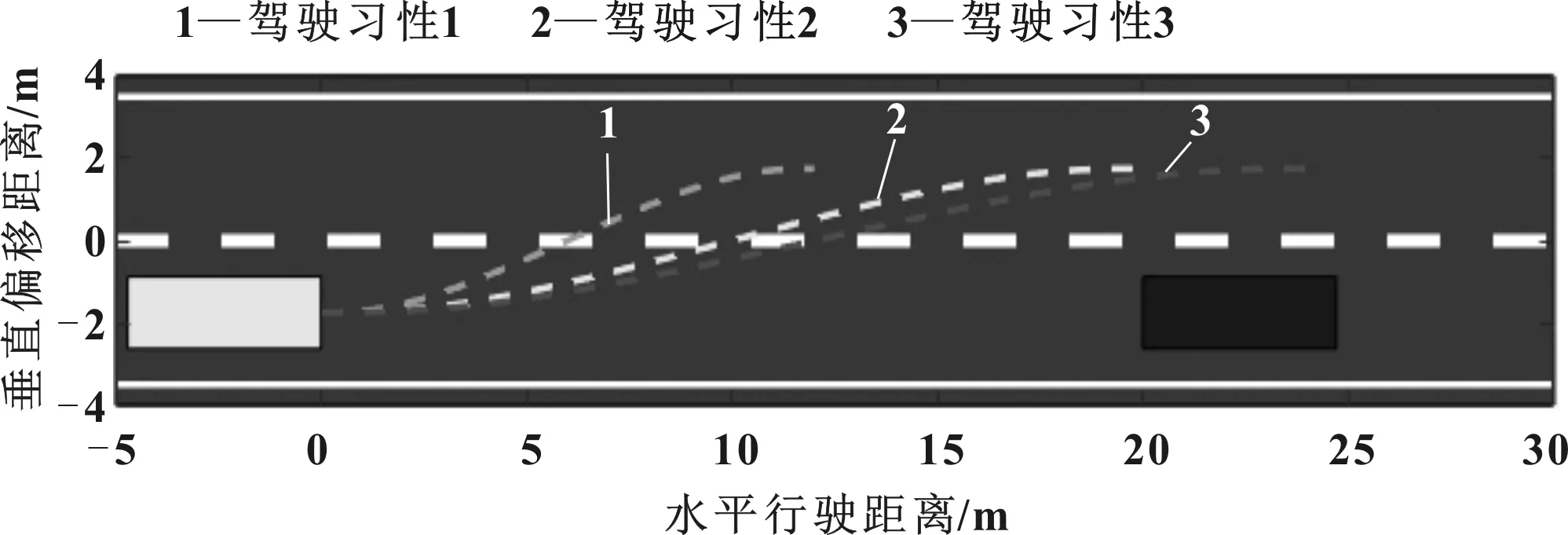
圖2 3種駕駛習性軌跡曲線
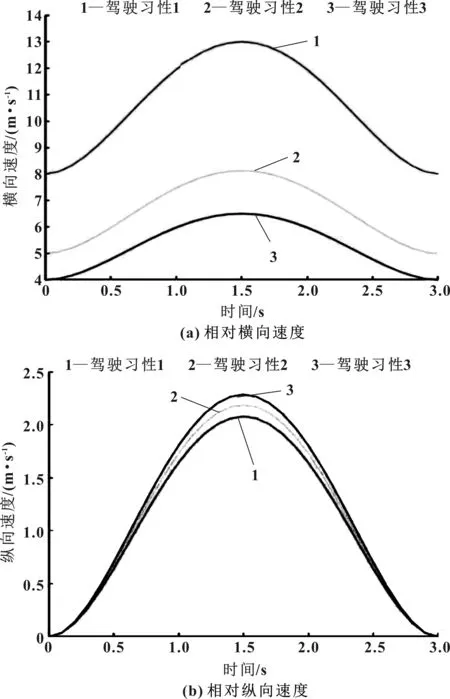
圖3 換道過程中生成參數的變化
3.3 仿真結果分析
綜上分析可得,激進型駕駛員換道時,個性化匹配的相對橫向速度最高且變化幅度最大,在轉向指令發出后1.5 s左右,達到最大速度;適度型駕駛員換道時,個性化匹配的相對速度居中,操作穩定適中;謹慎型駕駛員換道時,個性化匹配的相對速度稍緩,速度變化幅度相對較低。相對縱向速度變化趨勢相近且整體變化值在2 m/s的范圍內浮動,在轉向換道過程中影響不大。
4 結語
以不同駕駛習性的駕駛員在自主換道中的個性化控制策略匹配分析為案例。用戶根據自己的駕駛習性操作習慣及駕駛風格等確定駕駛類型,系統通過對用戶的個性化分析,確定用戶類型并在輔助系統中匹配相關駕駛參數,使得智能駕駛輔助系統符合用戶自身的駕駛習慣,提高駕駛人的操作舒適性。智能駕駛輔助系統也可根據環境因素、路況等對相關駕駛參數做一些調整,保證駕駛的安全性。個性化的用戶體驗在智能駕駛輔助系統中的應用,一方面可以保證安全駕駛,另一方面提高駕駛人與車輛之間的交互默契性和駕乘舒適性。
安全、智能、舒適的汽車駕駛體驗是汽車未來的發展方向,對于自主品牌汽車研發而言,為用戶提前識別并預警潛在的安全問題,降低事故發生的概率,對于智能化的駕駛輔助系統開發仍極具挑戰。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
