果蔬采摘柔性手爪的研究
2022-03-29 05:10:54葉俊良楊岸松華文博施浩楠鄒坤潔
信息記錄材料 2022年2期
葉俊良,楊岸松,華文博,施浩楠,鄒坤潔
(南京農業大學 江蘇 南京 210031)
0 引言
機器人的末端執行器有時被稱為執行器或者機械手爪,其功能相當于人的手,一般安裝在機械臂的前端執行各種作業。目前機械手爪在農作物,尤其是表面嬌嫩易破損果蔬的種植生產中應用不多[1]。在我國農業經濟不斷發展的背景下,蔬菜和水果的產量越來越高,勞動強度越來越大,時效性要求也比較高,果蔬采摘的工作成本也在不斷提高,如果不及時解決此問題,就會影響我國農業經濟的發展。果蔬采摘機器人是農業機器人中研究較多的一個分支,還未完全推廣應用[2]。
目前,傳統的剛性機械采摘手爪基本實現了工業生產,已經開始應用于果蔬采摘中。剛性手爪在接觸柔軟的果蔬時,或多或少會造成作物的損傷,使果蔬品質下降。柔性手爪屬于一種無損采摘技術,其通過與不同果蔬采摘機器人結合,可以實現機械化生產和無損化采摘,優化果蔬采摘流程[3]。
本文在總結現有農業機械手爪的基礎上,提出一種柔性手爪,以期為農業機器人,尤其是果蔬的高效收獲提供技術支持。
1 機械手爪結構組成及設計思路
1.1 機械手爪結構組成
一般用于果蔬采摘的機械手爪主要由夾持機構、切斷機構、吸引機構和吸附機構等組成。
夾持機構包括4類:(1)手指以支點為中心開閉型。(2)手指平行開閉型。(3)多指機械手。(4)形狀記憶合金利用型[4]。切斷機構多采用刀片,可以像超聲波刀具一樣在刀刃上加上振動,獲得更大的切斷力。吸引機構的作用是在機器人在收獲過小果實或果實表面柔軟不能夾持時,利用吸引力將其吸入末端執行器中[5]。吸附機構多以吸盤為主,它是用真空泵產生的真空吸附對象[6]。
1.2 機械手爪設計思路
機械采摘手爪制作時,首先需要確定一些數據,如切斷果蔬穗軸需要多大的力,穗軸切斷后要用多大夾持力才不致滑落等。采摘手爪必須能夠應對生物特有的規律和差異,要具有處理不規則的、不定型的柔軟對象的能力。機械手爪的夾持力既不能損傷果實又要保證果實不掉落,需要在充分了解作業對象的切斷特性、形狀、大小和采摘要求的情況下設計末端執行器[7]。
2 機械手爪在果蔬采摘中的應用現狀
2.1 草莓采摘機器人
調查發現,我國農業大學在2004年,已經對農業機器人進行了研究[8]。部分學者在溫室中,栽培了草莓,并且設計了3種采摘機器人,主要為橋架式、三自由度直角坐標式和四自由度龍門式。在對這3種采摘機器人的應用特點進行分析時,發現其主要是通過CCD傳感系統,進而獲取更加全面的彩色圖像,然后在此基礎上通過圖像處理,對目標草莓進行準確的定位。同時,還要通過末端的執行器,實現采摘。在對其中的四自由度龍門式機器人進行應用時,發現其不僅能夠解決較窄壟溝收獲草莓的問題,還能優化采摘的流程。相關的研究表明,此采摘機器人,能夠對草莓的成熟度進行準確判斷,并且其手爪抓取的成功率也是非常高的,所以此機器人在草莓采摘中已經得到了有效應用。
2.2 茄子采摘機器人
早在2006年,我國農業大學的一些學者就聯合研發了機械手爪,結合果蔬采摘的特點,實現了對茄子采摘機器人的開發[9]。在對此機器人的組成部分進行分析時,發現其主要有DMC運動控制器和PC機等內容。其中關節式機械手在應用時,一般與人體的腰部和腕部相對應,能夠對目標果實進行有效采摘。如果在直方圖上,應用固定雙閾值法,對采摘流程進行分析。我們可以通過對圖像的分割,進而得到果實目標,然后建立二值圖像,在此基礎上對其進行邊緣提取。調查發現,該采摘機器人的抓取成功率比較高,大約為89%[10]。
2.3 番茄采摘機器人
新時期,為了實現對以前機械手爪的完善和創新,不斷提高果蔬采摘的效率,大部分學者在原有的機械采摘基礎上,實現了對五自由度關節式的設計,研發了西紅柿的采摘機器人。在對其機器人的功能特點進行分析時,發現其絕對定位精度誤差是比較小的,一般在10 mm之內。
此外,南京農業大學的一些學者,也對番茄采摘的機械進行了分析[11],主要應用雙目立體視覺技術,實現對紅色番茄的準確定位,然后更好地體現成像原理。在兩幅二維的圖像上,還可以恢復目標,實現對三維坐標的建立。如果目標和攝像機之間的距離在300~400 mm,這時其深度誤差要控制在3%~4%之間,進而避免對具體的采摘帶來影響[12]。
2.4 黃瓜采摘機器人
除了上述采摘軟體機械手爪方式外,相關學者還研制了新的采摘機器人,主要為六自由度圓柱型的采摘機器人[13]。這種機器人本身具有六自由度的機械臂,并且各關節都采用了步進電機驅動設計方式。在對視覺系統進行分析時,發現其是在RGB模型的基礎上,對圖像進行分割的。因此,黃瓜機械人在采摘中的應用,能夠在提高采摘準確性的同時,實現對運動情況的精準定位,其精度一般為±2.5 mm。
3 機械手爪存在的問題及解決思路
3.1 機械手爪存在的問題
3.1.1 果蔬破損率高、靈敏度低
目前,大部分的機械手爪在果蔬采摘中采用開關量控制,需要預先抓取力,不能根據抓取的實際情況調整到合適的抓力,導致增大收獲作業時果蔬的破損率。此外,傳統機械手柔軟度低,易對果蔬嬌嫩的表面造成破壞,這無疑會拉低經濟效益。為擁有足夠大的加持力或切斷力,導致現有的機械手爪和周邊機器的重量、尺寸較大,增大了機械臂和移動機構的負擔,再進一步還會影響到機械臂移動時的慣性力和控制方法,造成靈敏度低。
3.1.2 成本高,通用性差
針對不同的果蔬,往往需要設計不同的機械結構和控制系統。往往一種機械手爪,只能針對某一特定的植物進行采摘,進而完成比較單一的任務,所以說不同采摘機械手之間并不存在通用性,設備的利用率也比較低,這會在一定程度上增加制造和維護的成本。
3.2 解決思路
3.2.1 加強果蔬物理特性測試
在采摘手爪設計前,需要對待采摘果蔬的物理特性進行綜合分析,為采摘手爪夾持力的設定提供參考數據,以解決因夾持力過大導致的果蔬破碎率高等問題。表1中分類列舉了和機器人設計有關的主要特性,這些特征可以作為影響手爪設計的重要因素。另外,以待收獲對象的相關特性為基礎,預先設定夾持力、切斷力、吸附力等參數之后進行作業[14]。
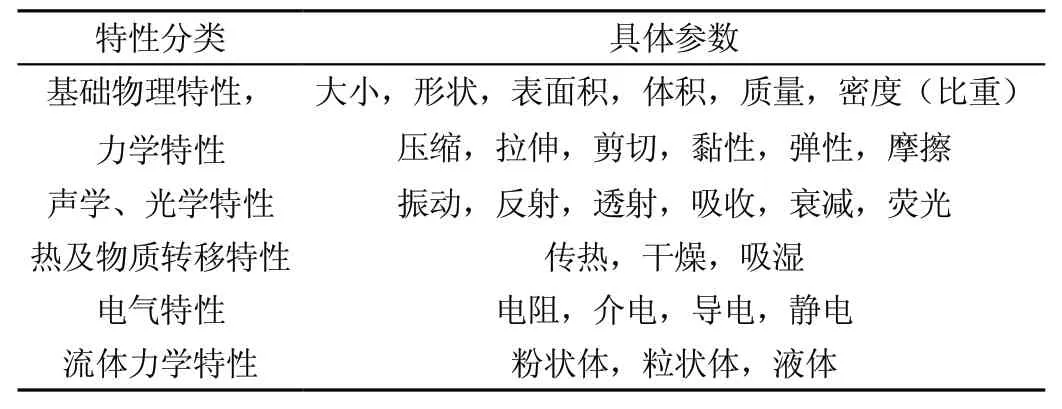
表1 果蔬的物理特性
3.2.2 推廣植物工廠栽培
對以果蔬為對象的采摘手爪來說,栽培方式是影響其采摘效果的最主要的因素。據研究,植物工廠可實現作物的均一化,比如番茄的多層栽培技術,提高了作物從播種到收獲、包裝完全自動化以及收獲裝置通用性的可能性,因此可以加強植物工廠的推廣應用,為收獲手爪的高效工作奠定基礎[15]。
4 新型柔性手爪設計
為了解決上述問題,提高果蔬采摘的效率,需要采取措施加強對手爪構型和材料的深入研究,在此基礎上研制出一款符合實際收獲的機型,保證柔性手爪應用的有效性和科學性。
4.1 應用柔性材料
由于果蔬易損易碎的物性,傳統機械手容易對其造成破壞。而采用柔性材料的手爪表面柔軟,抓取動作平滑,在較大的面積上分布應力、增加接觸時間,從而最大程度地降低沖擊力,保護脆弱物體表面不受損傷;另一方面,柔性的結構具有多自由度和高靈活性的特點,使其擁有更廣泛的應用空間。
4.2 結構設計與優化仿真
在柔性手爪進行設計和完善時,應結合果蔬特性進行設計,保證手爪的合理性。此外,在滿足采摘作業要求上,對機械結構進行仿真優化,不斷強化柔性手爪的靈活性和通用性,從而進一步降低機械發生故障的概率[16]。手爪設計流程圖見圖1。柔性手爪結構圖見圖2。
5 柔性機械手爪的應用與展望
5.1 應用
本研究設計的手爪采用軟體材料制作而成,其具有驅動簡單、自由度無限、可根據水果形狀貼合變形、自適應抓取等特點。該采摘手爪的手指是柔性的,即便目標果實周圍有其他果實和主莖等障礙,也可沿果實的表面前進。又因與果實的接觸面積較大,夾持力分散,可得到較大摩擦阻力以防止果實滑脫,可作為蘋果、番茄、蘑菇等多種農作物采摘機器人的末端執行器。以蘑菇為例,蘑菇在菇房床架密集地生長,該機械手爪抓取蘑菇傘的表面,對蘑菇施加力使其脫離菇房床架完成無損化收獲,此外,還可根據蘑菇的大小即時調節手指的抓取幅度[17]。蘑菇采摘實驗圖見圖3。
5.2 展望
為了提高手爪使用率,降低成本、提高收益,需要研制只更換末端執行器的某些部件就可對其他農作物進行作業的通用型手爪,如果在末端執行器上附加一些機能,收獲時向果實發射聲波可以判斷成熟度,以免收獲未成熟果實[18]。檢測功能也會成為今后末端執行器的新功能[19]。在此背景下,相關學者應用感器融合方法,實現了對軟體機械手爪的進一步開發[20]。多感知柔性手爪是未來果蔬采摘的重要研究方向,也是果蔬采摘由自動化邁向智能化最重要的技術之一。
6 結語
要實現蔬果的自動化采摘,需要加強對末端執行器的研發。為了使末端執行器能夠進行柔性作業,首先需要把握作業對象的特點。另外,把握生物生長狀況也是設計末端執行器不可缺少的要素。柔性機械手爪能減少對果蔬表面的破壞,可以提高采摘效率,實現對傳統方式的創新,優化果蔬抓取的流程,從而進一步提高采摘工作的質量。本研究設計的柔性手爪采用包絡式設計,可抓取多種果蔬,通用性強,具有良好的應用前景。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09