基于衛星影像技術的海岸線水域變化高精度檢測系統設計
2022-03-30 07:12:40刁永洲
計算機測量與控制 2022年3期
刁永洲
(廣州海事測繪中心, 廣州 510200)
0 引言
海岸線是海洋和陸地的分界線,也是海水歷經陸地極限位置所連接的線,屬于構成海洋和陸地不可缺少的重要線狀地形要素。人為的活動嚴重影響了海岸線生態系統的結構和功能,使其成為海洋生態環境脆弱區。海岸線水域變化精度檢測對于實現海岸線水域量值穩定,保證船舶安全運行有重要意義,也是目前我國海岸線水域測量的主要目標之一[1-3]。因此,準確檢測海岸線位置、屬性及水域變化,對海洋生態環境和經濟建設具有重要意義。
目前相關領域學者針對海岸線水域變化檢測進行了研究。文獻[4]設計了基于多時相遙感影像的海岸線變化監測系統。利用多時相遙感影像技術,根據該技術空間限制特點,獲取海岸線分布情況,構建海岸線水域變化監測系統,實現海岸線水域變化監測。該系統具有一定的有效性,但系統的監測穩定性較差。文獻[5]設計了基于潮汐規律修正的海岸線遙感監測系統。采用Landsat數據,結合修正歸一化水體指數,提取海岸線水邊線,對潮汐規律影響海岸水邊線提取信息的因素進行分析,利用海岸高程數據,獲取潮位校正方法,構建海岸線水域變化監測系統,實現海岸線遙感監測。該系統具有一定的可行性,但該系統的監測精度較低。
為了解決上述問題,本文設計了基于衛星影像技術的海岸線水域變化高精度檢測系統,該系統通過主控器、多光譜傳感器和電源設計了硬件結構,采用衛星影像技術,嵌入Linux操作系統和MySQL數據庫,完成系統軟件設計,實現海岸線水域變化高精度檢測,并通過對比實驗驗證了設計系統的檢測穩定性較好、精度較高,能夠有效縮短海岸線水域變化檢測時間。
1 基于衛星影像技術的海岸線水域變化高精度檢測系統硬件設計
衛星影像技術是目前研究的新型技術,通過衛星獲取地面圖像,得到的圖像可以進行數字化掃描。相較于普通的影像技術,衛星影像技術得到的畫面更加細致,能夠大幅度獲取圖像,具有很強的宏觀性。除此之外,衛星影像技術具備的多波動性和多時相性也是其他技術難以比擬的,大量信息融合,方便用戶處理。本文設計的基于衛星影像技術的海岸線水域變化高精度檢測系統硬件主要由主控器、多光譜傳感器和電源三部分組成。其中,采用STM32C8T6為主控芯片的主控器,完成高效的數據處理、通訊連接和集中控制。以多光譜傳感器為核心光學檢測設備,通過采集光學數據,生成海岸線水域圖像。采用圖像信號處理器進行信號處理,實現數據轉換。將XL1509-5.0轉換芯片為核心外接電源,完成電壓轉換,將OUTPUT作為電源開關輸出引腳,完成主控器電源控制。系統硬件結構如圖1所示。
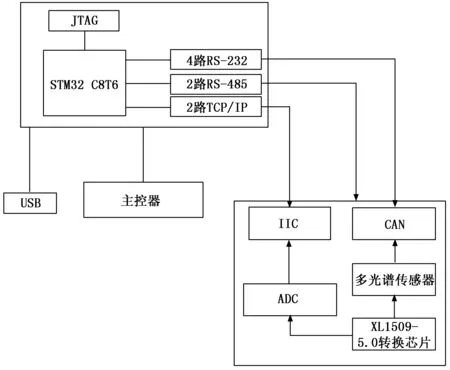
圖1 基于衛星影像技術的海岸線水域變化高精度檢測系統硬件結構圖
1.1 主控器
主控器是基于衛星影像技術的海岸線水域變化高精度檢測系統中具有系統數據處理、通訊連接和集中控制能力的中央控制設備。
本文設計的主控器以STM32C8T6為主控芯片,STM32C8T6具有2個高級定時器以及3個通用定時器,SRMB大小為20 kB,FLASH大小為64 kB,兼具IIC、USB、CAN、ADC通用IO口等多種接口,實現與外界設備的數據傳輸。主控器結構如圖2所示。
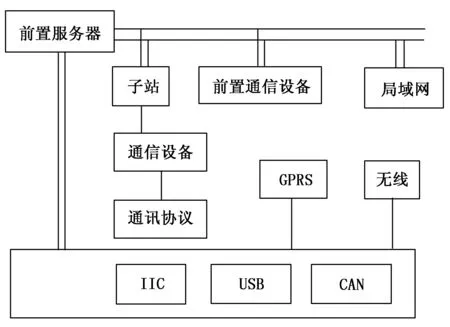
圖2 主控器結構圖
圖2中,主控器最多可同時控制255個遠程P2C終端硬件設備,主要包括傳感器、數據采集器、檢測器等在內的P2C終端硬件設備[6-8]。針對海岸線水域變化檢測需求,采用基于P2C技術完善主控器性能,采用導軌式安裝方式,提升主控器的控制能力。即通過局域網和前置通信設備,且在子站中網管通訊協議下,以網絡技術為基礎,實現衛星影像數據的提取和云數據的傳輸。
1.2 多光譜傳感器
為實現高精度的海岸線水域變化檢測,以多光譜傳感器為主要檢測設備進行光學檢測,通過采集光學數據生成海岸線水域圖像。從結構上,可將多光譜傳感器分為光學部分和顯示部分兩類[9-10]。光學部分主要包括反射光學元件、成像光學元件、分光元件,分別實現入射光的反射、成像以及劃分。針對采集光的光譜類別,將分光光譜劃分為11個譜段,且為補償光譜成像的非均勻性,在成像光學元件的周圍放置標準溫度板,從而提升成像的可辨識度。多光譜傳感器結構如圖3所示。
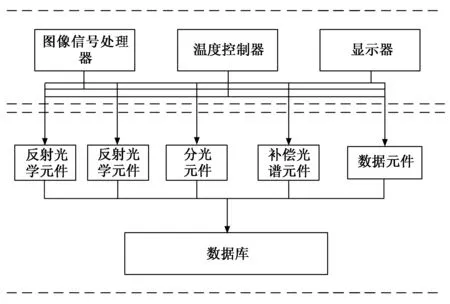
圖3 多光譜傳感器結構圖
圖3中,顯示部分包括圖像信號處理器、溫度控制器和顯示器,其中,多光譜傳感器的成像元件的成像為數字化格式,為實現數據轉換,采用圖像信號處理器進行信號處理,最高處理速度為8 bit[11-12]。溫度控制器的控制范圍為20~40 ℃,能夠有效降低傳感器本身紅外感應對檢測結果的影響。顯示器的圖像水平分辨率高于1 000線顯示格式為標準I2C格式。
1.3 電源設計
針對基于衛星影像技術的海岸線水域變化高精度檢測系統的供電需求,采用12 V外接電源進行供電,考慮不同硬件設備的電壓供給,采用XL1509-5.0轉換芯片實現電壓的轉換。電源結構如圖4所示。

圖4 電源結構圖
電壓可調范圍為1~37 V,主要電壓可轉換為5 V和3.3 V。XL1509-5.0轉換芯片具有一個150 kHz的DC/DC轉換器,不需設置其他的外部元件,其本身的最高負載驅動能力為2 A,平均負載電流為1 200 mA,轉換效率高,能夠維持系統內穩定的電源供給的同時,具有極好的線性電流輸出[13-14]。XL1509-5.0轉換芯片以OUTPUT作為電源開關的輸出引腳,便于主控器對電源進行控制,當引腳處于低狀態時,電源處于開啟狀態,反之,處于關閉狀態。
2 基于衛星影像技術的海岸線水域變化高精度檢測系統軟件設計
基于上述設計的系統硬件結構,在基于衛星影像技術的海岸線水域變化高精度檢測系統框架平臺上嵌入Linux操作系統,引入Ubuntu操作系統、MySQL數據庫、衛星影像分析處理、網絡通信等相關技術[15-17],構建系統軟件開發平臺,實現開源軟件共享的同時,滿足多用戶任務處理需求,完成海岸線水域變化高精度檢測。
2.1 系統操作程序設計
Linux操作系統遵循GNA規范,不僅開發成本低,而且穩定性強、性能高。由于Linux操作系統的內核程序編碼以C語言為編譯語言,因此支持AMD、i386等系統平臺和多種硬件設備,且Linux操作系統自帶圖像處理軟件,兼具高性能的同時,Linux還具有漏洞升級、入侵防護、攻擊控制等功能,保證系統的穩定運行[18-20]。采用衛星影像技術,對采集的海岸線水域圖像進行濾波處理、降噪處理以及圖像二值化計算等,針對衛星影像的分析,不需安裝其他軟件,只需進行原有軟件的升級就能實現高精度的海岸線水域變化檢測。基于衛星影像技術的海岸線水域變化高精度檢測系統操作流程如圖5所示。
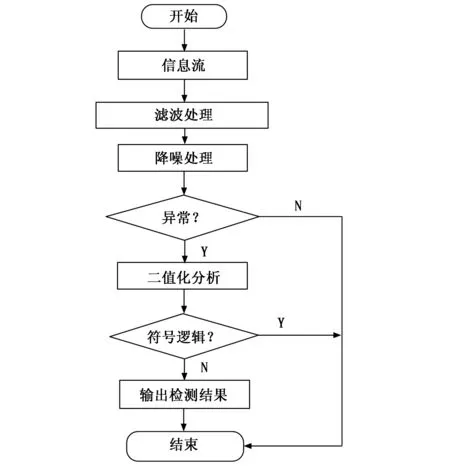
圖5 基于衛星影像技術的海岸線水域變化高精度檢測系統操作流程圖
基于Linux操作系統支持x86、x64等多種架構的優勢,考慮大多是開發者的操作體驗,為建立與Windows相似的桌面系統,搭建Ubuntu操作系統,提升系統的抗病毒干擾性,為系統提供豐富的桌面操作接口,便于開發者進行操作,從而有效實現海岸線水域變化高精度檢測。
2.2 MySQL數據庫
MySQL數據庫是一種應用廣泛、開發簡單、應用編程接口豐富的SQL數據庫管理系統,以SQL數據庫查詢語言為核心開發語言,相較于其他的數據庫管理系統,其優勢在于存儲量大、更新便利、操作速度較快且能夠記錄用戶的實時操作數據。
MySQL數據庫的構建為動態Web應用和衛星影像數據海岸線水域變化檢測系統提供的豐富的功能。本文設計的基于衛星影像技術的海岸線水域變化高精度檢測系統采用MySQL V5.5版本,其主要的工作方式為客戶端/服務器,包含多種服務端程序和客戶端命令程序,其優點如下:
1)默認數據庫存儲引擎為InnoDB,采用完全多線程存儲,提升海岸線水域圖像存儲能力。
2)提升了Windows、Linux操作系統下的系統性能,對Java、c語言等多種系統開發語言提供接口,支持系統的可擴展性。
3)耦合性低、兼容性較強,全面支持采用SOL查詢語言的聚合函數和標準的JOIN、ODBC等。
4)包含DATE、TIME、CHAR在內的多種列類型,且每一列均具有缺省值,實現海岸線水域變化高精度檢測系統參數的自動選擇,為海岸線水域變化高精度檢測系統參數的運行提供便利。
3 實驗分析
為了驗證本文設計的基于衛星影像技術的海岸線水域變化高精度檢測系統的有效性,將文獻[4]基于多時相遙感影像的海岸線檢測系統和文獻[5]基于潮汐規律修正的海岸線檢測系統進行對比實驗。
3.1 實驗設置
在此次實驗中,設定海岸線水域的原始高度為3 m,海岸線水域變化精度檢測裝置的檢測范圍為0~6 m,為了保證實驗結果的有效性和穩定性,實驗在實驗室正常溫度和光照下進行。
3.2 系統檢測精度分析
首先對比3種檢測系統的檢測精度,將檢測誤差作為檢測精度的評估指標,通常情況下,檢測誤差越小,系統的檢測精度越高,反之,檢測誤差越大,系統的檢測精度越低。選取5個實驗點位,在相同的實驗溫度和光照下,分別進行海岸線水域上升和下降兩種水域變化實驗,分別記錄3種檢測系統的水域變化結果,實驗結果如圖6和圖7所示。
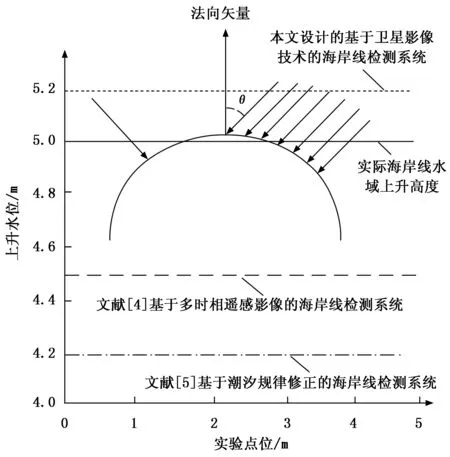
圖6 水域上升實驗結果
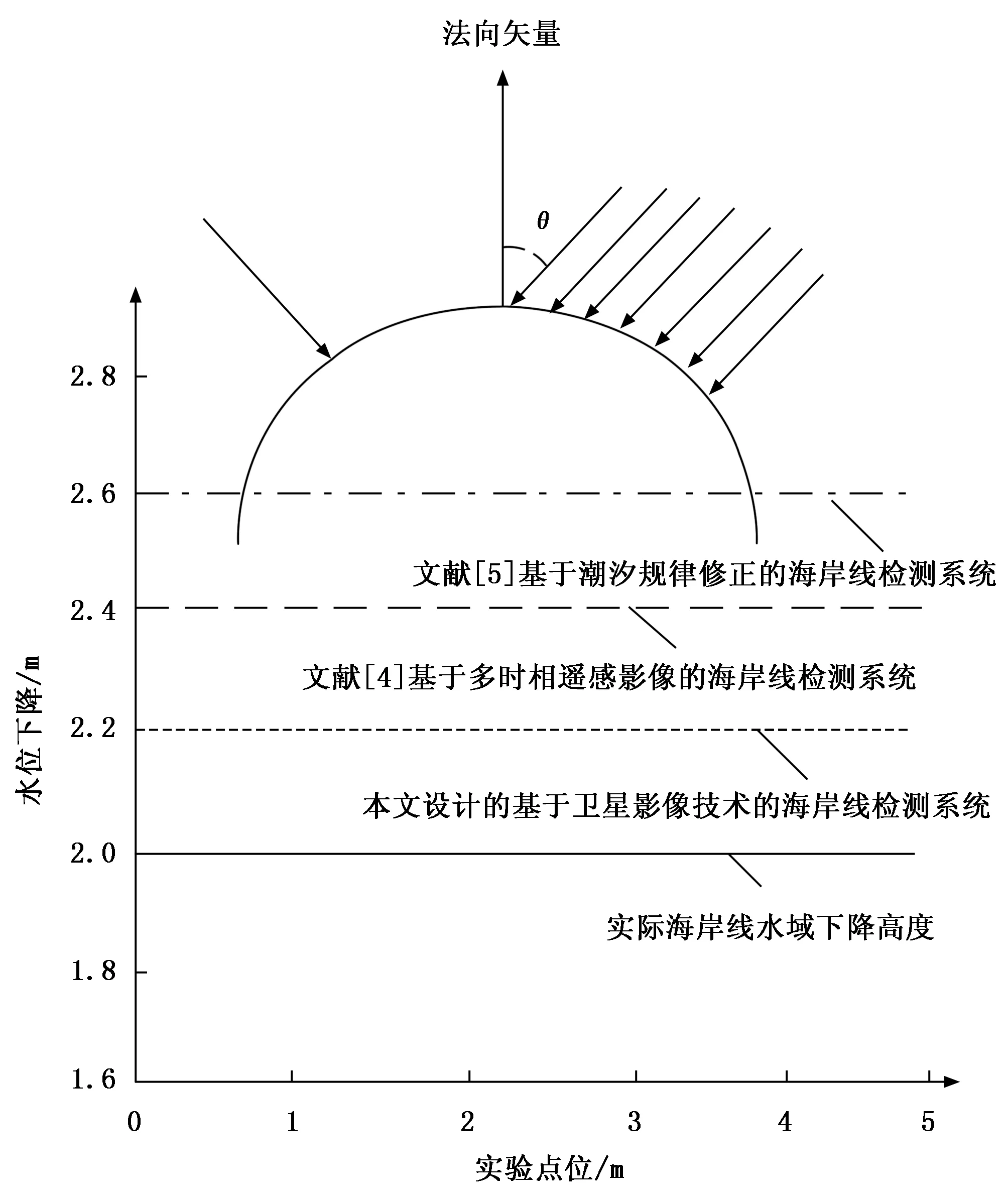
圖7 水域下降實驗結果
根據圖6可知,在進行水域上升實驗結果中,本文設計的基于衛星影像技術的海岸線檢測系統的水域上升高度為5.2 m,文獻[4]基于多時相遙感影像的海岸線檢測系統的水域上升高度為4.5 m,文獻[5]基于潮汐規律修正的海岸線檢測系統的水域上升高度為4.2 m。分別將3種系統的水域上升高度與實際水域上升高度進行對比發現,本文設計的基于衛星影像技術的海岸線檢測系統的水域高度誤差為0.2 m,而文獻[4]基于多時相遙感影像的海岸線檢測系統的水域高度誤差為0.5 m,文獻[5]基于潮汐規律修正的海岸線檢測系統的水域高度誤差為0.8 m。由此可知,在水域上升實驗中,本文設計的基于衛星影像技術的海岸線檢測系統的檢測誤差較小,表明系統的檢測精度較高。因為本文設計的系統采用衛星影像技術,結合Linux操作系統和Ubuntu操作系統,以數字形式記錄采集的海岸線水域圖像,可以準確記錄海岸線相關地面信息,從而有效提高海岸線水域變化檢測精度。
根據圖7可知,在水域下降實驗結果中,本文設計的基于衛星影像技術的海岸線檢測系統的水域下降到2.2 m,文獻[4]基于多時相遙感影像的海岸線檢測系統的水域下降到2.4 m,文獻[5]基于潮汐規律修正的海岸線檢測系統的水域下降到2.6 m,而實際海岸線水域下降到2.0 m。分別將3種系統的水域上升高度與實際水域上升高度進行對比發現,本文設計的基于衛星影像技術的海岸線檢測系統的水域下降誤差為0.2 m,而文獻[4]基于多時相遙感影像的海岸線檢測系統的水域下降誤差為0.4 m,文獻[5]基于潮汐規律修正的海岸線檢測系統的水域下降誤差為0.6 m。由此可知,在水域下降實驗中,本文設計的基于衛星影像技術的海岸線檢測系統的檢測誤差較小,表明系統的檢測精度較高。因為本文設計的系統利用衛星影像技術,對采集的海岸線水域圖像進行濾波、降噪等處理,使其采集的海岸線水域圖像具有較強的連續性,并結合MySQL數據庫,實時記錄海岸線水域變化數據,為海岸線水域變化高精度檢測提供了有效保障。
3.3 系統檢測穩定性分析
設置海岸線水域的原始高度為3 m,其海岸線水域變化精度檢測偏移范圍設定在[3 m,-3 m]之間。基于上述實驗條件下,對系統的穩定性進行實驗,評估系統穩定性的指標為水域在上升以及下降實驗過程中水域位置的偏移范圍,偏移范圍越小,系統檢測穩定性越好,偏移范圍越大,系統檢測穩定性越差,3種系統的檢測穩定性實驗結果如圖8所示。
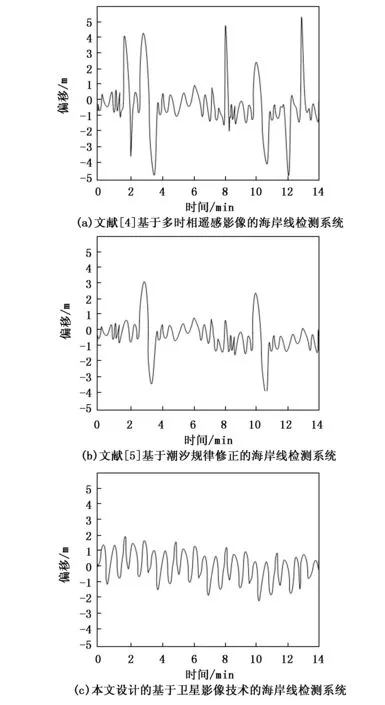
圖8 系統檢測穩定性實驗結果
通過對圖8實驗結果進行分析可知,隨著時間的不斷改變,本文設計的基于衛星影像技術的海岸線檢測系統的水域位置偏移范圍在[3 m,-3 m]之間,其偏移范圍最小,而文獻[5]基于潮汐規律修正的海岸線檢測系統水域位置偏移范圍在[4 m,-4 m]之間,其偏移范圍次之,文獻[4]基于多時相遙感影像的海岸線檢測系統水域位置偏移范圍在[5 m,-5 m]之間,其偏移范圍最大。由此可知,本文設計的基于衛星影像技術的海岸線檢測系統的水域在上升以及下降實驗過程中,水域位置的偏移范圍最小,表明系統的檢測穩定性較好。
3.4 系統檢測時間分析
在此基礎上,進一步驗證本文設計的基于衛星影像技術的海岸線檢測系統的檢測時間,在MATLAB仿真軟件實驗平臺下,采用Toolbox工具箱,記錄在水域上升和下降過程中,3種系統海岸線水域變化檢測時間,3種系統的檢測時間對比結果如表1所示。
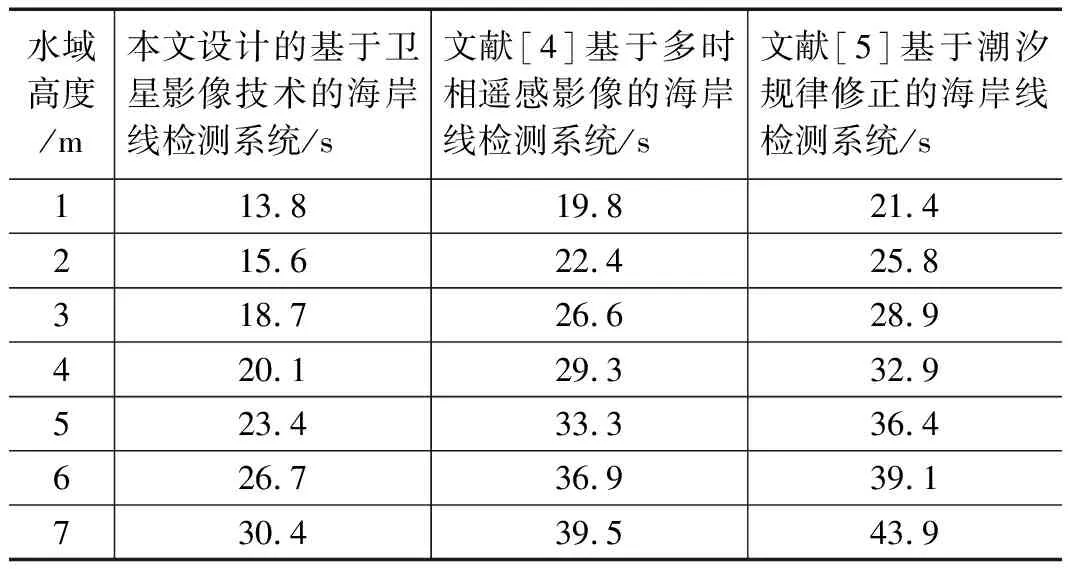
表1 3種系統的檢測時間對比結果
根據表1中的數據可知,隨著水域高度的增加,3種系統的檢測時間隨之增加。當水域高度為7 m時,文獻[4]基于多時相遙感影像的海岸線檢測系統的檢測時間為39.5 s,文獻[5]基于潮汐規律修正的海岸線檢測系統的檢測時間為43.9 s,而本文設計的基于衛星影像技術的海岸線檢測系統的檢測時間為30.4 s。由此可知,本文設計的基于衛星影像技術的海岸線檢測系統能夠有效縮短檢測時間。
綜合上述分析,通過獲得的系統檢測精度、檢測穩定性以及檢測時間實驗結果可知,本文設計的基于衛星圖像技術的海岸線水域變化高精度檢測系統的檢測穩定性較好,能夠有效提高檢測精度,縮短檢測時間。
4 結束語
針對海岸線內水域的動態變換,本文設計了一種基于衛星影像技術的海岸線水域變化高精度檢測系統,在系統硬件結構設計的基礎上,采用衛星影像技術,嵌入Linux操作系統和MySQL數據庫,實現海岸線水域變化高精度。該系統能夠有效提高檢測精度和穩定性,降低檢測時間。通過掌握海岸線水域的變化情況,了解海洋與陸地的時空變化特征,建設我國海洋生態環境,為海洋資源的開發提供數據支持和技術保證,同時促進衛星影像技術的進一步發展和應用,為其他相關檢測領域提供技術借鑒。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
