動力系統(tǒng)的智能化監(jiān)測與安全保護(hù)設(shè)計
2022-03-30 07:12:42彭先敏章貴川車兵輝尹欣繁魏一博
計算機(jī)測量與控制 2022年3期
彭先敏, 章貴川, 車兵輝, 尹欣繁,魏一博
(中國空氣動力研究與發(fā)展中心 低速空氣動力研究所,四川 綿陽 621000)
0 引言
直升機(jī)旋翼模型風(fēng)洞試驗是在風(fēng)洞試驗環(huán)境下模擬直升機(jī)前飛狀態(tài)、斜下降狀態(tài)等飛行狀態(tài),以測試旋翼模型升阻比、噪聲特性、結(jié)冰特性等相關(guān)性能的試驗,簡單地說就是在風(fēng)洞中遙控直升機(jī)飛行[1]。試驗基于槳尖馬赫數(shù)相似原理實施,其旋翼槳尖速度與真實直升機(jī)槳尖速度相同(≥219 m/s),為此直升機(jī)模型風(fēng)洞試驗常出現(xiàn)由于危險故障處理不及時導(dǎo)致故障損壞快速擴(kuò)大,造成嚴(yán)重?fù)p失的情況出現(xiàn)。比如在直升機(jī)模型風(fēng)洞試驗中出現(xiàn)過減速箱軸承損壞卡死導(dǎo)致旋翼突然停轉(zhuǎn)受損;槳轂軸頸斷裂導(dǎo)致一片旋翼飛出,動平衡失效,旋翼振動快速增大至10 g以上,損壞試驗臺測試天平及傳動部件;試驗過程中操縱系統(tǒng)電動缸失速至旋翼周期變距快速加大,氣動力矩平衡失效,振動快速加大,至旋翼天平嚴(yán)重?fù)p壞;試驗中電機(jī)軸承受損至電機(jī)掃堂,旋翼模型因急速停轉(zhuǎn)而受損,如此等等,這些故障都是在幾秒鐘內(nèi)出現(xiàn)并造成較大損失。4米直徑旋翼模型以額定轉(zhuǎn)速1 050 rpm旋轉(zhuǎn),其試驗中斷裂飛出槳尖的動能比一顆機(jī)槍子彈出膛的動能還大。可見直升機(jī)模型風(fēng)洞試驗是非常快速非常危險的動態(tài)試驗。
試驗臺動力系統(tǒng)提供旋翼模型旋轉(zhuǎn)的驅(qū)動力,在直升機(jī)模型風(fēng)洞試驗出現(xiàn)危及試驗安全的風(fēng)險時,最常使用的處置措施是正常停車或者讓旋翼自由停車,因此試驗臺動力系統(tǒng)是整個試驗臺安全保護(hù)的關(guān)鍵環(huán)節(jié)[2-5]。本文通過以動力系統(tǒng)主控PLC為核心,構(gòu)建“全方位監(jiān)測——高速數(shù)據(jù)通訊—運(yùn)行狀態(tài)分級—風(fēng)險評估—安全保護(hù)”的控制模式,從數(shù)字化、實時性、智能化等方面進(jìn)行優(yōu)化,設(shè)計實現(xiàn)了直升機(jī)風(fēng)洞試驗動力系統(tǒng)智能化監(jiān)測與安全保護(hù)方法。
1 總體架構(gòu)設(shè)計
直升機(jī)旋翼模型試驗臺動力系統(tǒng)主要包括驅(qū)動電機(jī)、變頻控制器等組成,以Φ2米共軸試驗臺為例,由于試驗臺減速箱的潤滑冷卻情況及傳動機(jī)構(gòu)的振動情況(振動位移量,以反應(yīng)傳動軸的同心度狀態(tài))也嚴(yán)重影響動力啟停運(yùn)行,本設(shè)計將該部分納入動力系統(tǒng)的安全監(jiān)測設(shè)計范疇,另外試驗臺其它子系統(tǒng)的運(yùn)行及機(jī)械部件的振動狀態(tài)(振動加速度,反應(yīng)各機(jī)械部件如減速箱、軸承等的運(yùn)行狀態(tài))出現(xiàn)危及試驗臺安全運(yùn)行時如何通知動力系統(tǒng)停車等情況也是動力系統(tǒng)安全運(yùn)行設(shè)計需要考慮的因素。由于可編程邏輯控制器PLC具有高度穩(wěn)定性及良好的抗干擾能力等,本設(shè)計以PLC為核心進(jìn)行構(gòu)建,系統(tǒng)的總體架構(gòu)如圖1所示。
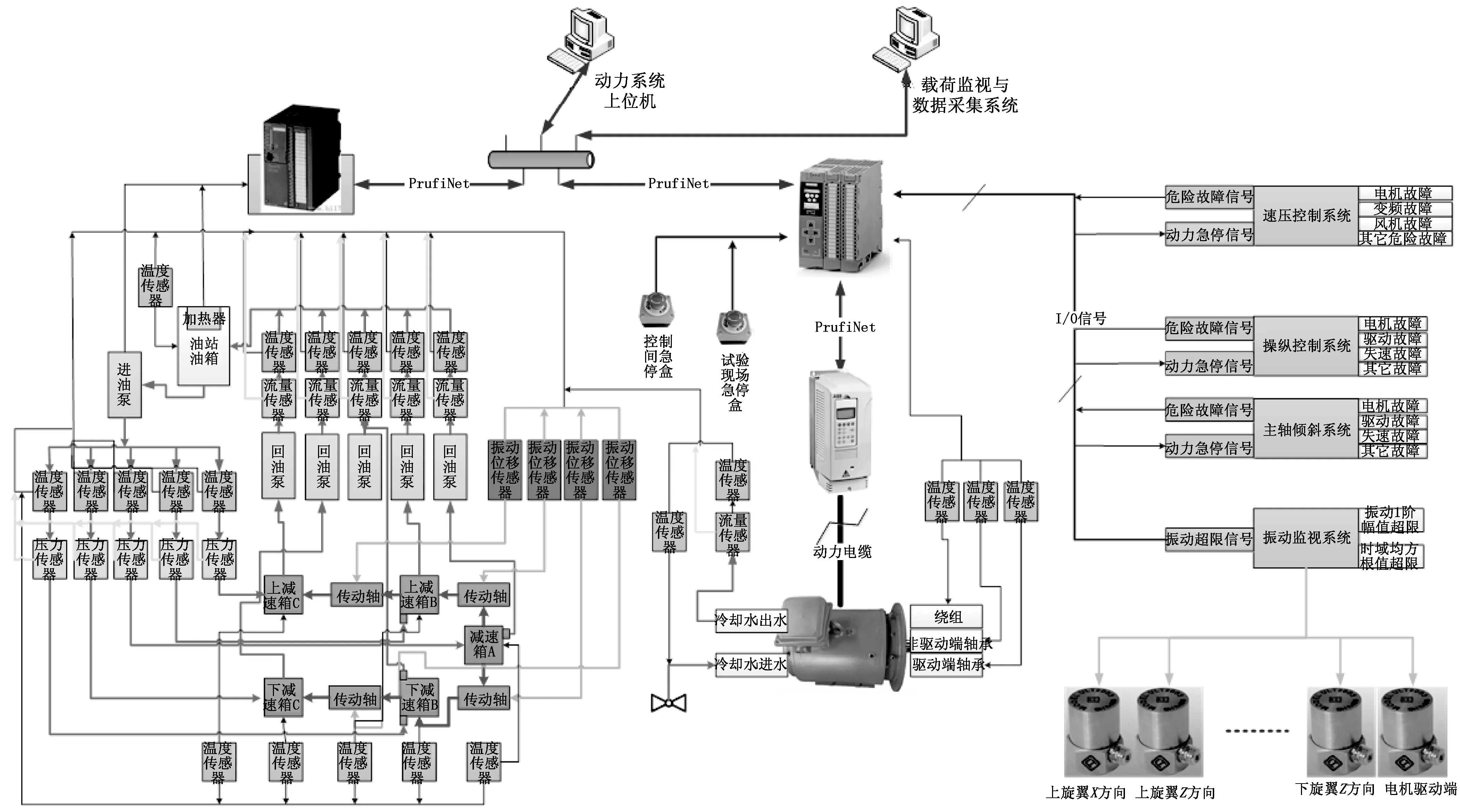
圖1 Φ 2米共軸試驗臺動力系統(tǒng)安全監(jiān)測總體架構(gòu)圖
如圖1所示,系統(tǒng)主要分潤滑油車及主控兩部分組成,其中潤滑油車部分PLC選用西門子S7-300PLC,主要完成減速箱潤滑油車的控制及相關(guān)出口油壓、出口油溫,回油流量、回油油溫等的實時監(jiān)測,另外還要完成減速箱溫度(反應(yīng)減速箱的運(yùn)行狀態(tài))、傳動軸振動位移(反應(yīng)傳動軸運(yùn)行時同心度情況),驅(qū)動電機(jī)冷卻水溫度、流量等的實時監(jiān)測。主控PLC選用西門子S1500PLC,主要完成與CT變頻器和潤滑油車的通訊控制及電機(jī)軸承溫度的監(jiān)測,完成測控間、試驗現(xiàn)場的急停控制,完成與振動監(jiān)視系統(tǒng)、操縱控制系統(tǒng)等其它子系統(tǒng)的通訊控制。主控PLC與變頻器、潤滑油車PLC及上位機(jī)之間通過Profinet總線進(jìn)行數(shù)據(jù)通訊。試驗臺其它子系統(tǒng)及急停信號與主控PLC之間通過I/O信號進(jìn)行連接。當(dāng)其它子系統(tǒng)發(fā)生危險故障時,如速壓子系統(tǒng)發(fā)生電機(jī)故障、變頻器故障、冷卻系統(tǒng)故障及其它危險故障時,產(chǎn)生24 V I/O高電平信號發(fā)送至主控PLC,主控PLC啟動危險情況處理流程,先產(chǎn)生I/O信號通知除速壓子系統(tǒng)以外的其它子系統(tǒng),同時啟動動力系統(tǒng)停車程序。試驗臺振動監(jiān)視系統(tǒng)主要取監(jiān)測量的一階FFT幅值及相應(yīng)監(jiān)測量的時域均方根值進(jìn)行安全監(jiān)測,當(dāng)該監(jiān)測值在試驗穩(wěn)轉(zhuǎn)速運(yùn)行過程(旋翼啟停過程中經(jīng)過共振點時振動一般會大于所設(shè)門限閥值)中超過所設(shè)置門限閥值時[6-8],振動監(jiān)測子系統(tǒng)輸出一高電平I/O信號發(fā)送至主控PLC。
直升機(jī)旋翼模型風(fēng)洞試驗中旋翼是唯一的負(fù)載,因此驅(qū)動電機(jī)的關(guān)鍵運(yùn)行參數(shù),如電機(jī)功率、電流、電壓等與旋翼的運(yùn)行狀態(tài),如升力系數(shù),旋翼功率、旋翼總距等相關(guān),旋翼的實時運(yùn)行信息主要由旋翼載荷監(jiān)視與采集系統(tǒng)提供。動力系統(tǒng)上位機(jī)控制程序通過TCP通訊方式得到旋翼系統(tǒng)相關(guān)運(yùn)行信息,從而為判斷電機(jī)的運(yùn)行狀態(tài)提供數(shù)據(jù)。
如此通過Profinet總線完成與潤滑油車、變頻器完成相關(guān)信息交互,通過I/O信號方式完成與其它子系統(tǒng)的信息交互,通過TCP通訊完成與旋翼載荷監(jiān)視與采集子系統(tǒng)的信息交互,同時上位機(jī)程序還可以通過TCP通訊方式與試驗管理軟件完成網(wǎng)絡(luò)指令任務(wù),以實現(xiàn)過程網(wǎng)絡(luò)控制。這樣將以往相互隔離的試驗臺各子系統(tǒng)分離的信息孤島聯(lián)接成為一個整體[9],為動力系統(tǒng)的安全運(yùn)行乃至整個試驗的安全運(yùn)行提供了充裕的監(jiān)測數(shù)據(jù)依據(jù)。
2 高速數(shù)據(jù)通訊實現(xiàn)
直升機(jī)旋翼模型風(fēng)洞試驗的高轉(zhuǎn)速及高風(fēng)險特性,對監(jiān)測數(shù)據(jù)的實時性要求很高,發(fā)生危險故障1~2秒內(nèi)就會故障擴(kuò)散至產(chǎn)生較大的損失,因此對試驗安全保護(hù)啟動的時間要求在百毫秒級內(nèi)。為了保證監(jiān)測數(shù)據(jù)的實時性,數(shù)據(jù)通訊方式必須可靠且高速。
2.1 基于Libnodave的上位機(jī)與PLC通訊
上位機(jī)與西門子PLC之間常用的通訊方式主要有3種:OPC、西門子公司提供的接口函數(shù)庫PRODAVE和開源函數(shù)庫Libnodave。2014年理想能源設(shè)備(上海)有限公司的凌建華對采用POVDAVE和Libnodave函數(shù)庫完成上位機(jī)與PLC通訊速率進(jìn)行了對比研究,后者在PLC數(shù)據(jù)讀時間在15 ms以內(nèi),寫數(shù)據(jù)時間基本在1 ms以內(nèi),而PORDAVE庫函數(shù)相對要慢很多,特別對S7-300PLC讀寫數(shù)據(jù)需要花費(fèi)500 ms左右[8]。而OPC方式更慢,作者本人曾采用該方式編寫動力系統(tǒng)控制程序,讀出的電機(jī)轉(zhuǎn)速曲線呈階梯狀,而相同系統(tǒng)程序采用Libnodave函數(shù)庫編寫,曲線連續(xù)性很好。因此本方案上位機(jī)程序采用Libnodave函數(shù)庫編寫與PLC的數(shù)據(jù)通訊。
2.2 PLC與變頻器的通訊
本設(shè)計中使用的變頻器是CT Unidrive SP型,其具有Profinet通訊卡,通過該卡可以與主控PLC之間進(jìn)行高速數(shù)據(jù)通訊,通訊率可達(dá)100 Mbps。首先在變頻器參數(shù)配置中配置好Profinet通訊卡的IP地址,注意上位機(jī)與PLC的IP地址設(shè)置在一個網(wǎng)段內(nèi);在西門子博途軟件中進(jìn)行設(shè)備組態(tài)時,配置從站時設(shè)備類型選擇CT Unidrive SP變頻器,在IP地址和子網(wǎng)掩碼項填寫變頻器通訊卡的相關(guān)參數(shù),選擇自動生成Profinet設(shè)備名稱,系統(tǒng)會自動生成一個unidrive -sp名,在設(shè)備概覽欄中填寫要讀寫的變頻器參數(shù)[11],如圖2所示。其PLC讀取變頻器程序如圖3所示。

圖2 PLC與變頻器通訊參數(shù)設(shè)置
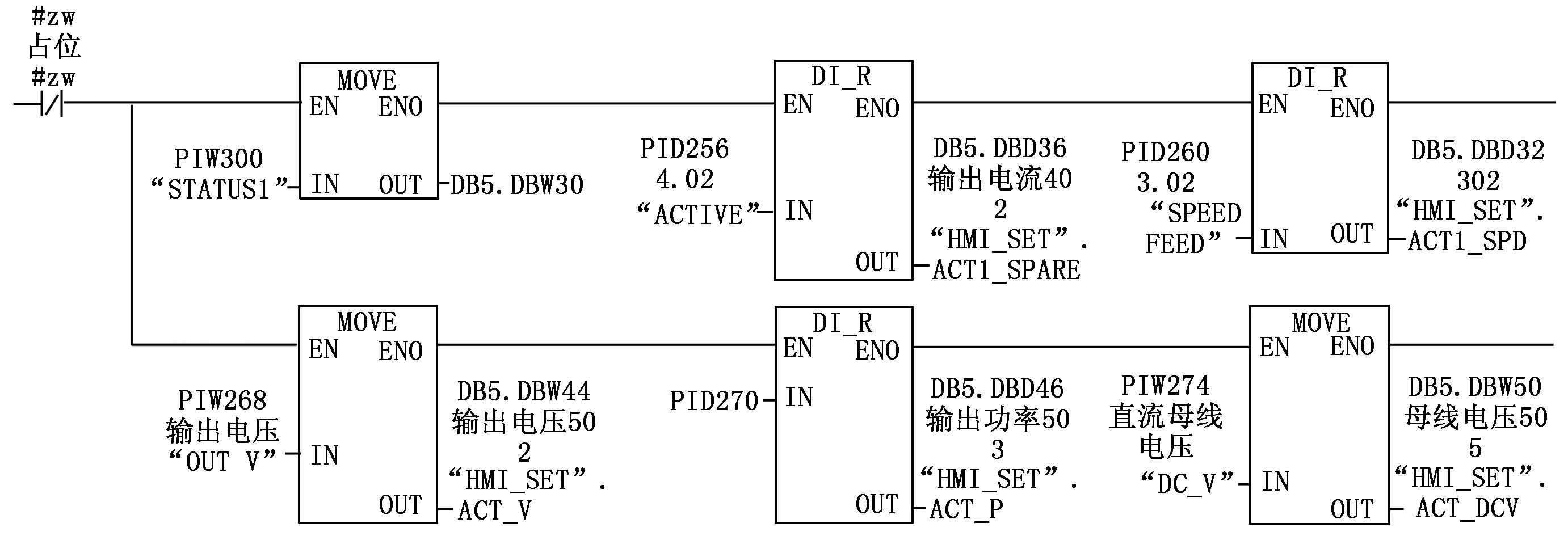
圖3 PLC讀變頻器參數(shù)程序
2.3 上位機(jī)軟件與旋翼載荷監(jiān)視與采集軟件通訊
網(wǎng)絡(luò)數(shù)據(jù)通訊方式有多種,如UDP通訊、TCP通訊等,本設(shè)計選用美國國家儀器公司(NI)推出的DataSocket控件,它主要基于微軟的COM和ActiveX技術(shù),對TCP/IP協(xié)議進(jìn)行高度封裝,面向測量和自動化應(yīng)用,支持多種數(shù)據(jù)傳送協(xié)議,用于共享和網(wǎng)絡(luò)發(fā)布實時數(shù)據(jù),是一種方便易用的高性能數(shù)據(jù)交互編程接口。在10 m網(wǎng)絡(luò)中的傳輸速率可達(dá)到640 kbps,而目前測控網(wǎng)速早已達(dá)到1 000 m,其數(shù)據(jù)傳輸速率更高,能夠滿足本設(shè)計數(shù)據(jù)通訊實時性的要求[1]。本設(shè)計中旋翼載荷監(jiān)視與采集系統(tǒng)作為Datasocket服務(wù)器端,實時發(fā)布其關(guān)鍵數(shù)據(jù),動力系統(tǒng)控制軟件從中獲取升力系數(shù)、旋翼功率、操縱總距等與動力相關(guān)的關(guān)鍵數(shù)據(jù)。
3 運(yùn)行狀態(tài)分級及風(fēng)險評估
動力系統(tǒng)即包含潤滑油車及驅(qū)動電機(jī)等部件,也包含了試驗臺減速器溫度及傳動軸振動位移等監(jiān)控,同時還包含了試驗臺其它子系統(tǒng)的運(yùn)行狀態(tài),因此本設(shè)計中運(yùn)行狀態(tài)主要針對部件級,風(fēng)險評估主要針對系統(tǒng)級。
3.1 運(yùn)行狀態(tài)分級及保護(hù)措施
為滿足直升機(jī)旋翼模型風(fēng)洞試驗動力系統(tǒng)安全監(jiān)測保護(hù)的實時性,本設(shè)計主要根據(jù)實時監(jiān)測運(yùn)行數(shù)據(jù)快速判斷各部件的實時運(yùn)行狀態(tài),并在上位機(jī)軟件上進(jìn)行相應(yīng)提示。根據(jù)對部件安全運(yùn)行的影響程度,將各部件運(yùn)行狀態(tài)分為正常、警告、危險三級。其“正常”狀態(tài)即運(yùn)行狀態(tài)完全不影響部件的安全運(yùn)行;“警告”狀態(tài)即運(yùn)行狀態(tài)處于影響部件安全的邊界狀態(tài),不能長時間運(yùn)行,在完成該點試驗的情況下最好終止試驗運(yùn)行;“危險”狀態(tài)即運(yùn)行狀態(tài)嚴(yán)重影響部件的安全,必須立即停止運(yùn)行。控制軟件根據(jù)部件運(yùn)行狀態(tài)的判斷,在上位機(jī)軟件相應(yīng)部件監(jiān)測參數(shù)顯示中將其顯示背景設(shè)置為本色(正常)、黃色(警告)、紅色(危險),并在系統(tǒng)工作狀態(tài)中對警告及危險狀態(tài)進(jìn)行記錄。
3.2 運(yùn)行狀態(tài)評價方法
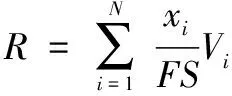
部件級運(yùn)行狀態(tài)評價方法主要根據(jù)門限閥值進(jìn)行評估。門限閥值的設(shè)置有兩類:第一類根據(jù)廠家明確的工作范圍設(shè)置,如電機(jī)軸承溫度、減速箱工作溫度、電機(jī)電流等,嚴(yán)格按廠家標(biāo)準(zhǔn)進(jìn)行設(shè)置,該類稱為系統(tǒng)報警;該類閥值主要反映部件設(shè)計特性,不能反映部件特性隨運(yùn)行時間、工況等的累積變化情況, 為此根據(jù)根據(jù)歷史運(yùn)行數(shù)據(jù)分析,根據(jù)最能反映的該特性變化的特征值,溫度量的包絡(luò)曲線和溫升斜率,均方根等,振動信息的特征頻率幅值、時域均方根、均方誤,轉(zhuǎn)速信息穩(wěn)定狀態(tài)下的均方誤差、電流信息的均方誤差等,每次運(yùn)行后將試驗運(yùn)行信息記錄文件進(jìn)行數(shù)據(jù)分析,并將歷史數(shù)據(jù)匯總分析,對這些特征數(shù)據(jù)分析,更有利于發(fā)現(xiàn)部件的性能變化。針對這此特征參數(shù)設(shè)置專門的門限閥值,我們稱之為特征警戒值,其警戒值計算公式如下:

(1)
(2)
(3)

特征警戒報警主要作為故障狀態(tài)的提前預(yù)警信號,試驗時采用運(yùn)行數(shù)據(jù)滑動平均的方法計算方差和峰峰值等,并根據(jù)警戒值進(jìn)行運(yùn)行狀態(tài)評估,評估為危險狀態(tài)時(在系統(tǒng)報警安全范圍內(nèi)),主要在該次試驗完成后進(jìn)行運(yùn)行數(shù)據(jù)分析,給出相應(yīng)部件狀態(tài)分級評價結(jié)論,并對相應(yīng)部位進(jìn)行安全檢查及維護(hù)[12]。
另外,在直升機(jī)試驗中,對與旋翼模型參數(shù)(如槳葉片數(shù)),旋翼工作狀態(tài)等有關(guān)聯(lián)的部件參數(shù),如電機(jī)工作電流、功率,電機(jī)溫度等參數(shù),則在根據(jù)旋翼穩(wěn)轉(zhuǎn)速工作狀態(tài)下相應(yīng)曲線(如圖4為4米直徑旋翼模型電機(jī)工作電流與旋翼操縱總距關(guān)系曲線)。試驗時根據(jù)實時值與相應(yīng)曲線的預(yù)估值的偏差與預(yù)估值的比值進(jìn)行狀態(tài)評估,根據(jù)試驗經(jīng)驗,當(dāng)該值大于20%,該條試驗數(shù)據(jù)可靠性存疑,需要正常停下進(jìn)行系統(tǒng)排查,多期試驗后可對比例進(jìn)行相應(yīng)調(diào)整。
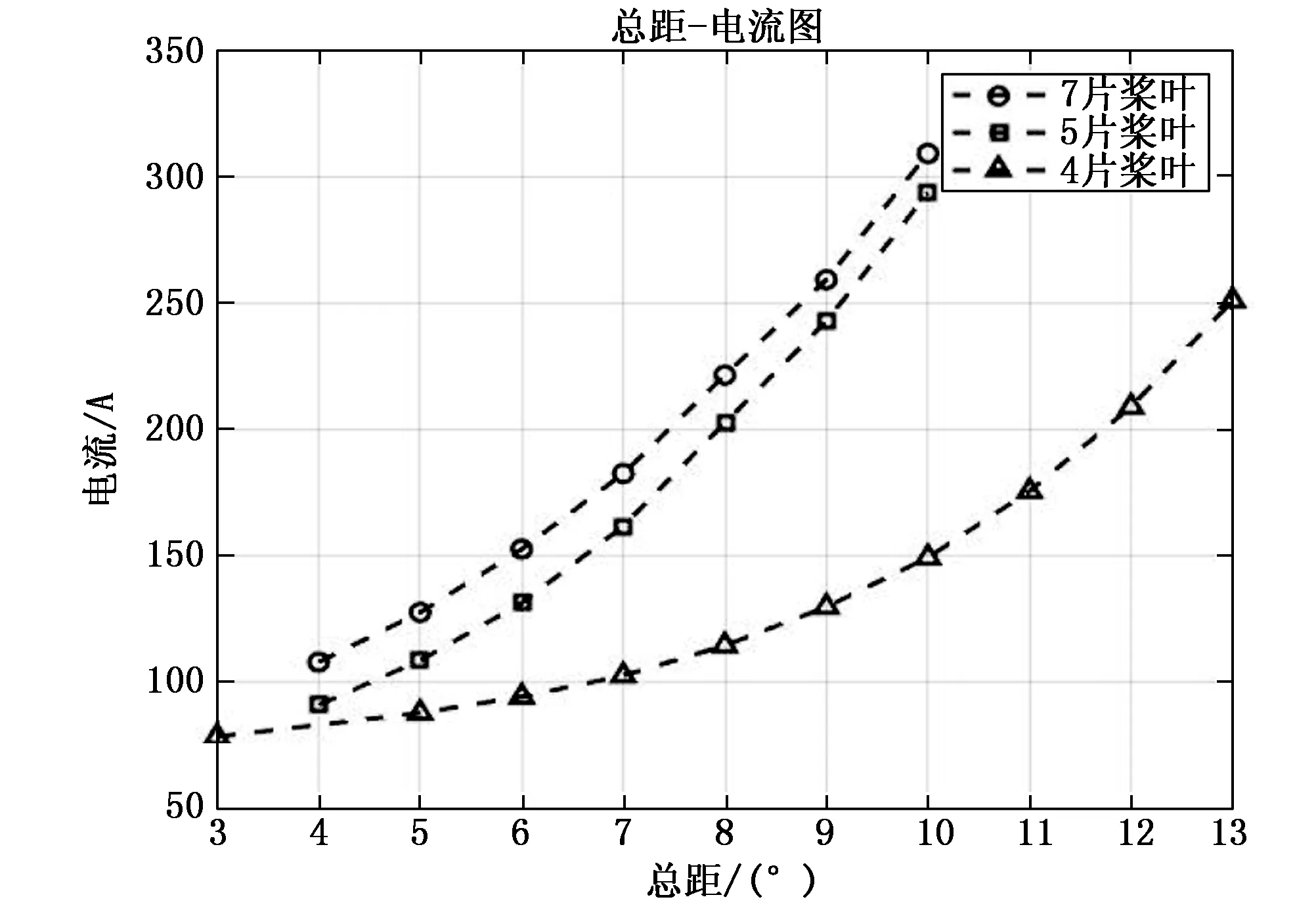
圖4 不同旋翼模型電機(jī)電流與旋翼總距的關(guān)系曲線
3.3 風(fēng)險狀態(tài)評估及安全保護(hù)
研究其它行業(yè)風(fēng)險評估標(biāo)準(zhǔn),國家標(biāo)準(zhǔn)及旋翼模型風(fēng)洞試驗設(shè)備維護(hù)保養(yǎng)規(guī)程,確定旋翼試驗中動力系統(tǒng)安全風(fēng)險評估方法:風(fēng)險等級:嚴(yán)重度(S)、發(fā)生可能性(O)、可避免度(A)。評價參考因素:對試驗安全的影響(TI)、對設(shè)備安全的影響(SI)、故障發(fā)生概率(FP)、故障發(fā)生頻率(FF)。系統(tǒng)所有部件特征變化對試驗安全風(fēng)險的影響評價權(quán)重:無影響 1 分;輕微 2 ~ 3 分;一般 4 ~ 6 分;嚴(yán)重 7 ~ 8 分;很嚴(yán)重 9 ~ 10 分[17-18]。風(fēng)險分析根據(jù)評價參考因素,分解系統(tǒng)各測試參數(shù)取對試驗風(fēng)險的權(quán)重,且總和為100分。根據(jù)實時監(jiān)測數(shù)據(jù)求系統(tǒng)的總的風(fēng)險值,公式如下:
(4)
其中:R為系統(tǒng)風(fēng)險值,xi為各監(jiān)測參數(shù)實時值,F(xiàn)S為各監(jiān)測值的最大工作值(一般取運(yùn)行狀態(tài)評估中第一類方法的危險閥值上/下限之差),V為各參數(shù)權(quán)重。
當(dāng)系統(tǒng)系統(tǒng)總風(fēng)險值R≤60時,系統(tǒng)處于低風(fēng)險(風(fēng)險等級A),試驗正常進(jìn)行;60
4 軟件設(shè)計
4.1 下位機(jī)軟件設(shè)計
下位機(jī)軟件包括主控PLC程序及潤滑油車PLC程序兩部分,其中潤滑油站PLC主要完成潤滑油溫的控制、數(shù)據(jù)采集、油站本地控制(遠(yuǎn)程則上位機(jī)通過主控PLC進(jìn)行控制)等功能;主控PLC在完成不同數(shù)據(jù)采集、與潤滑油站PLC和變頻器通訊獲取相關(guān)數(shù)據(jù)的基礎(chǔ)上,完成相應(yīng)狀態(tài)判斷及安全保護(hù)操作,根據(jù)上位機(jī)的指令完成相關(guān)設(shè)備啟停控制。PLC軟件采用模塊化的編程思路編程,將不同功能的子程序放在不同的功能塊FB和FC 里,然后從程序組織模塊OB里根據(jù)需要調(diào)用相應(yīng)的功能塊;將需要與上位機(jī)交互的數(shù)據(jù)依次放到PLC的不同的DB模塊中[19]。
主控PLC變頻電機(jī)控制流程圖如圖5所示。圖中所有數(shù)據(jù)代表一項門限閥值(主要是狀態(tài)評估中第一類門限閥值,結(jié)合歷史數(shù)據(jù)分析作調(diào)整),該閥值有專門的DB塊,由上位機(jī)軟件在完成程序與主控PLC連接后首先進(jìn)行寫入。在試驗運(yùn)行過程中不會修改,當(dāng)完成本次試驗旋翼模型第一次額定轉(zhuǎn)速的懸停試驗運(yùn)行后,結(jié)合本次試驗?zāi)P停衔粰C(jī)軟件分析運(yùn)行信息后,會進(jìn)行相應(yīng)門限閥值修改。
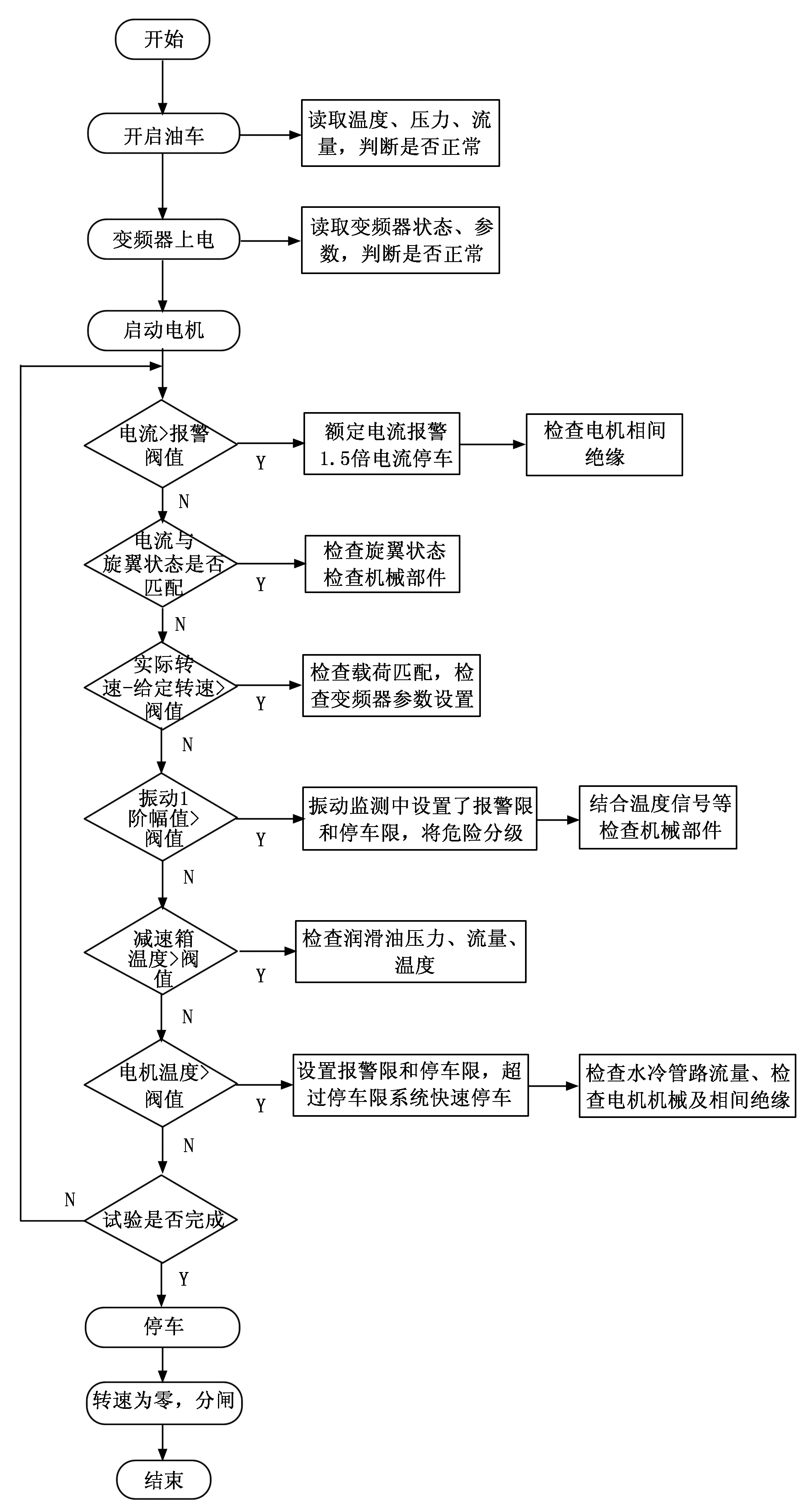
圖5 主控PLC控制流程
圖中關(guān)鍵部件振動加速度1階幅值>0.3 g這一條主要是由振動監(jiān)視系統(tǒng)通過I/O高電平信號輸出至主控PLC相關(guān)狀態(tài)。試驗過程中程序會巡檢振動及其它系統(tǒng)危險故障信號。
4.2 上位機(jī)程序
上位機(jī)程序結(jié)構(gòu)如圖6所示。
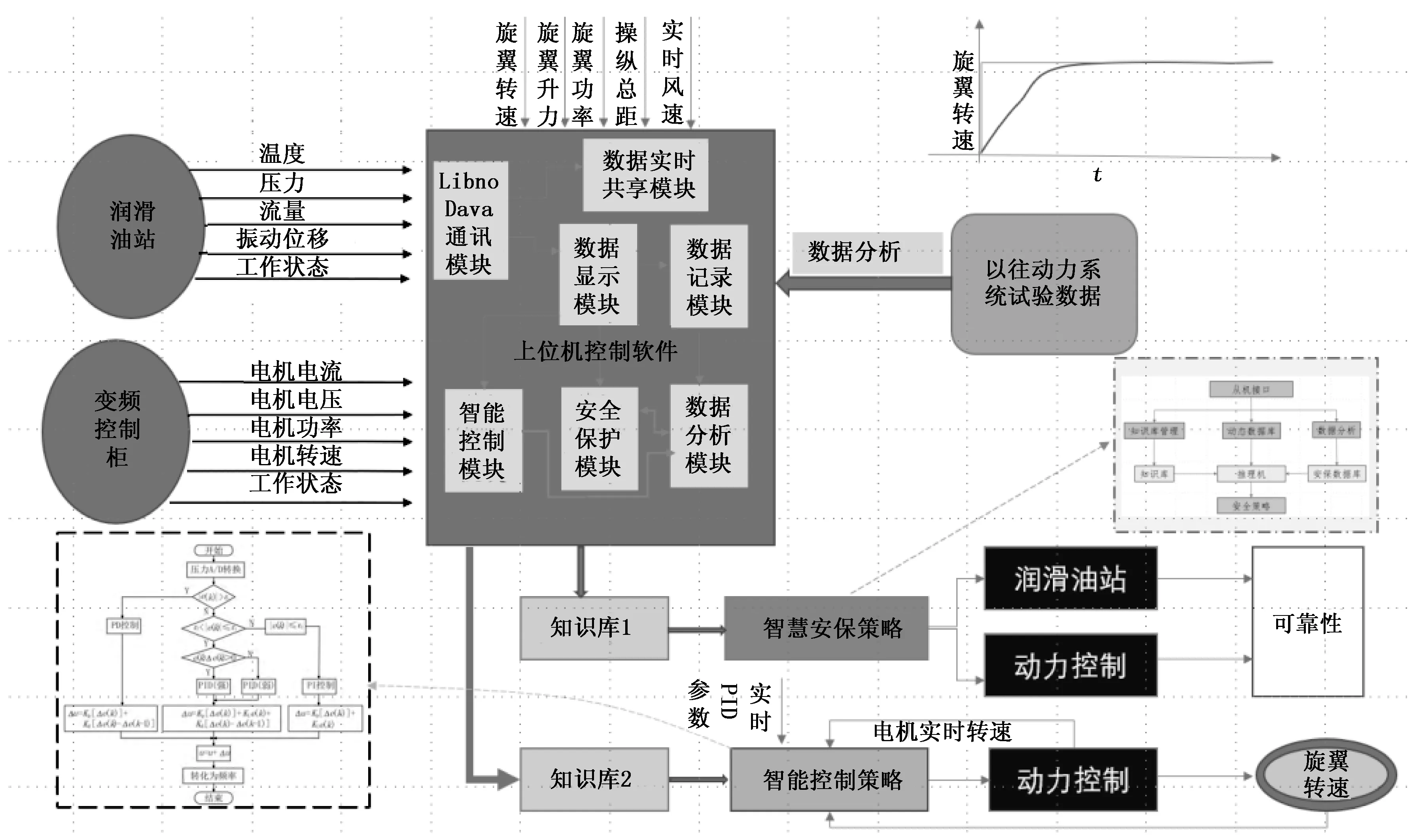
圖6 上位機(jī)軟件結(jié)構(gòu)示意圖
從圖6可以看出,上位機(jī)軟件主要由與主控PLC通訊模塊、數(shù)據(jù)顯示模塊、數(shù)據(jù)記錄模塊、數(shù)據(jù)共享模塊、智能控制模塊、安全保護(hù)模塊及數(shù)據(jù)分析模塊等構(gòu)成。其中還包括兩個知識庫,一個是根據(jù)系統(tǒng)以往運(yùn)行信息分析得出的安全閥值庫,軟件會根據(jù)旋翼模型參數(shù)等方面知識選擇合理的安全閥值,從而實時準(zhǔn)確評判系統(tǒng)運(yùn)行狀態(tài)。另一個知識庫則是變頻電機(jī)轉(zhuǎn)速控制PID參數(shù)知識庫,結(jié)合模糊控制和PID控制[20],以解決由于旋翼模型的不同,導(dǎo)致在大功率階段,旋翼轉(zhuǎn)速控制精度達(dá)不到優(yōu)于0.1%的目標(biāo)。另外歷史數(shù)據(jù)分析在每次試驗完成后自動分析該條試驗運(yùn)行信息記錄文件,將相關(guān)門限閥值調(diào)整寫入系統(tǒng)參數(shù)配置文件,將其它分析結(jié)果數(shù)據(jù)寫入專門文件或數(shù)據(jù)庫,以作系統(tǒng)故障演化過程分析。
5 試驗結(jié)果與分析
系統(tǒng)研制完成以后,參與Φ2米共軸試驗臺場面調(diào)試及FL14風(fēng)洞試驗。試驗過程中動力系統(tǒng)軟件在啟動電機(jī)后自動實時所有與動力運(yùn)行相關(guān)的運(yùn)行狀態(tài)數(shù)據(jù),直到電機(jī)停轉(zhuǎn)。經(jīng)專門編寫的動力系統(tǒng)運(yùn)行狀態(tài)數(shù)據(jù)分析軟件,對數(shù)據(jù)進(jìn)行后期處理,并作為歷史特征數(shù)據(jù)文件保存。
這里以電機(jī)驅(qū)動端軸承溫度為例進(jìn)行說明,根據(jù)廠商技術(shù)指標(biāo),設(shè)置電機(jī)驅(qū)動端軸承溫度第一類報警限為85 ℃,停車限為100 ℃。根據(jù)運(yùn)行歷史數(shù)據(jù)分析,其分析特征數(shù)據(jù)如表1所示。
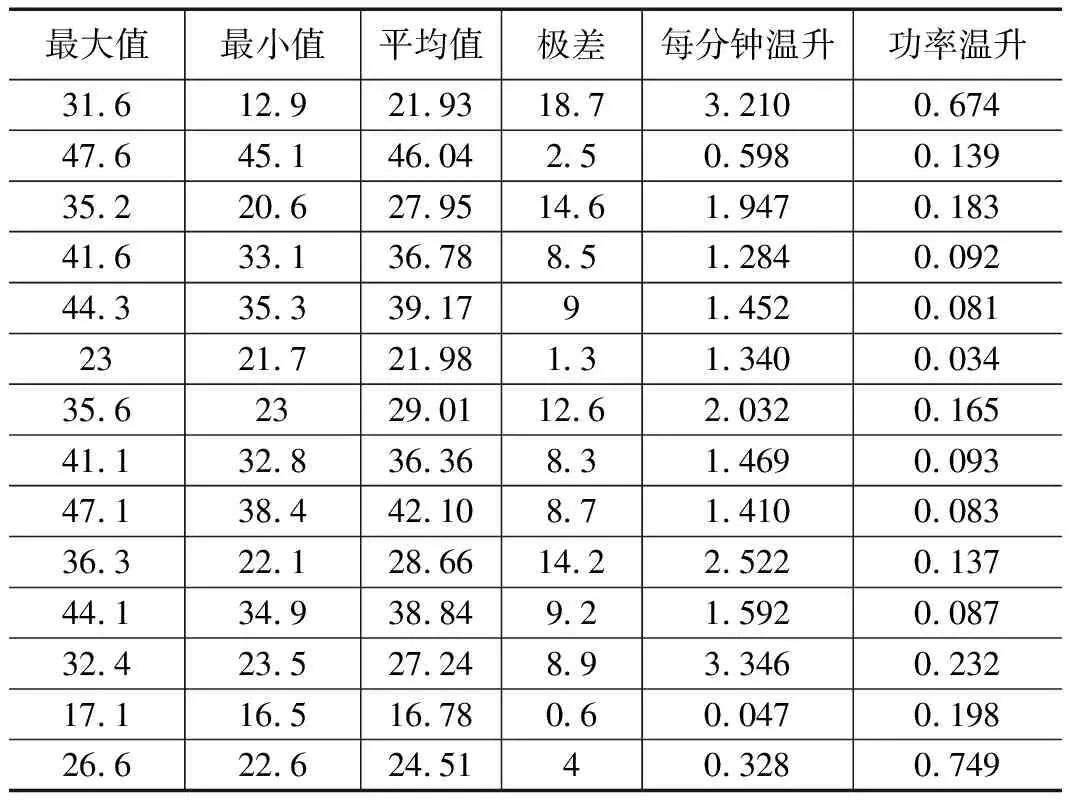
表1 電機(jī)驅(qū)動端軸承溫度歷史特征數(shù)據(jù)
在設(shè)備第二類門限閥值時,根據(jù)上述歷史數(shù)據(jù)分析發(fā)現(xiàn),平均溫度和極差受試驗平均功率和運(yùn)行時間影響較大,從而也影響每分鐘平均溫升的數(shù)據(jù)有效性,且分析發(fā)現(xiàn)每分鐘溫升離散度較大。功率溫升(極差/平均功率)能夠較好克服功率和運(yùn)行時間的影響,所示在設(shè)置溫度類狀態(tài)數(shù)據(jù)第二類門限閥值時,選擇功率溫升作為關(guān)鍵特征量。
根據(jù)式(1),計算得電機(jī)驅(qū)動端軸承溫度的功率溫升第二類警戒值為0.868 9。對電機(jī)非驅(qū)動端軸承溫度和繞組溫度、減速箱溫度等進(jìn)行相同算法處理。在今年試驗臺維護(hù)運(yùn)行過程中,發(fā)現(xiàn)減速器溫度范圍正常,功率溫升(0.747)高于警戒值(0.548)。檢查減速箱發(fā)現(xiàn)其潤滑油進(jìn)油量較小、調(diào)整進(jìn)油量,再運(yùn)行,各項參數(shù)正常。
6 結(jié)束語
本文以Φ2米共軸試驗臺為例,就直升機(jī)旋翼模型風(fēng)洞試驗動力系統(tǒng)安全監(jiān)測保護(hù)的整體架構(gòu)、數(shù)據(jù)通訊、運(yùn)行狀態(tài)分級評價及風(fēng)險分析,軟件設(shè)計等進(jìn)行了詳細(xì)論述。該設(shè)計通過多種方式打通了試驗臺各子系統(tǒng)之間的聯(lián)系,根據(jù)運(yùn)行數(shù)據(jù)為狀態(tài)評估提供了多種評判依據(jù),為動力系統(tǒng)的安全狀態(tài)分級及試驗風(fēng)險評估提供了科學(xué)、準(zhǔn)確的數(shù)據(jù)依據(jù),保證了安全保護(hù)的可靠性和科學(xué)性。目前該設(shè)計已廣泛應(yīng)用到直升機(jī)旋翼模型風(fēng)洞試驗動力系統(tǒng)控制,試驗應(yīng)用效果表明該設(shè)計狀態(tài)監(jiān)測評估準(zhǔn)確、實時,安全保護(hù)可靠,有利于提前對設(shè)備健康狀態(tài)進(jìn)行預(yù)警,充分滿足了直升機(jī)旋翼模型風(fēng)洞試驗對安全性的需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
