基于模板提取的信號分選算法研究
2022-03-31 12:02:52路鄧憶秋趙巍劉洋姜珍珠
艦船電子對抗 2022年1期
關鍵詞:信號
沈 路鄧憶秋趙 巍劉 洋姜珍珠
(中國電子科技集團公司第二十九研究所,四川 成都 610036)
0 引言
雷達信號分選是從截獲到的密集雷達脈沖流中分選出屬于不同雷達輻射源的脈沖,是雷達信號偵察處理中的核心組成部分之一。只有從脈沖流中分選出屬于不同輻射源的脈沖序列之后,才能對雷達輻射源施加壓制干擾或構造虛假目標回波信號進行欺騙干擾。而隨著現代電子戰環境信號日趨密集,電子戰系統截獲到的脈沖參數交疊日益嚴重,傳統分選方法難以給出準確的分選結果,且經常會出現信號的錯批與漏批。
傳統的信號分選方法主要有統計直方圖法、累計差值直方圖法(CDIF)和序列差值直方圖法(SDIF),但這些方法都只能適用于脈沖少量丟失的場景,脈沖重復間隔(PRI)變換法及其改進算法則存在算法運算量大以及容差參數選擇的問題4]。蔡偉對基于雷達信號樣本庫的信號分選識別方法進行了研究,但該算法需要雷達庫樣本庫作為先驗知識,牟皓、陳春利提出的基于SVM 分類器的信號分選方法需要對樣本脈沖進行訓練,丁增斗、翁永祥提出的聚類算法則要求脈沖在頻率和脈寬維度存在一定的區分度。
針對以上問題,本文提出一種基于模板提取的信號分選算法,采用模板匹配的思想提取最優的特征脈沖序列。算法考慮了脈沖特征不連續以及漏脈沖和脈沖分裂等情形,在不需要先驗雷達庫信息的情況下能夠有效提取雷達特征脈沖序列,實現電磁參數交疊的脈沖分選。
1 基于模板提取的信號分選算法
1.1 模板提取算法的提出
從統計學意義上來講,全脈沖序列就是按照脈沖到達時間先后順序排列的時間序列,而信號分選所要解決的問題就是從大量的時間序列中提取出反映信號變化特征的特征序列。雷達信號特征反映在脈沖描述字上是一組特征脈沖序列,如果在截獲到的脈沖中包含若干個重復的模板脈沖序列,那么信號分選則可以理解為提取信號的模板脈沖序列。
1.2 模板提取算法原理
設脈沖序列為:

式中:x ={ , , ,t },t =t t。
假設脈沖序列中存在信號,,…,S 共個信號,信號S 對應的時間特征序列為:Y ={y ,y ,,y },0<≤,

式 中:y ={ , , ,t };t =t -t。
脈沖序列的分選問題就轉化為提取模板序列Y 。模板提取算法步驟如下:
(1) 讀取輸入全脈沖的脈沖數據到達時間序列。
(2) 根據假設的模板序列查找與之相匹配且持續時間相同的匹配序列。如圖1所示,若假設模板序列={f },0≤<,Q ={g },0≤<,0≤<S ,表示與假設模板序列持續時間相同的匹配序列個數,S 表示匹配序列持續時間相同的脈沖個數,則:
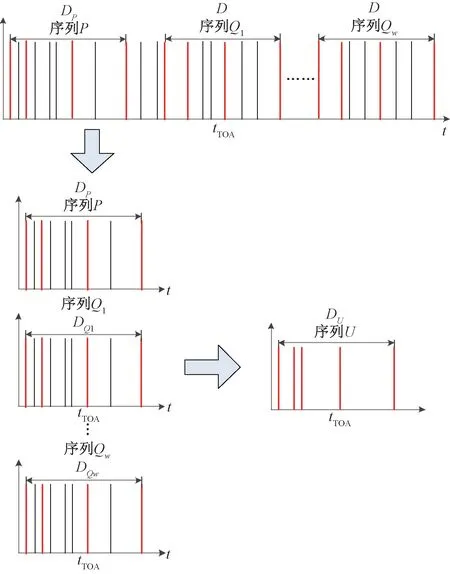
圖1 模板序列匹配處理流程圖

模板序列的持續時間為D = - ,序列Q 的持續時間為D = - ,若D ≤,則:

(3) 將提取得到的模板序列進行匹配處理

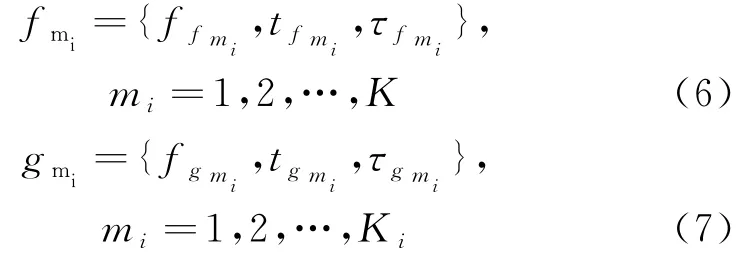
則式(8)和式(9)須滿足:
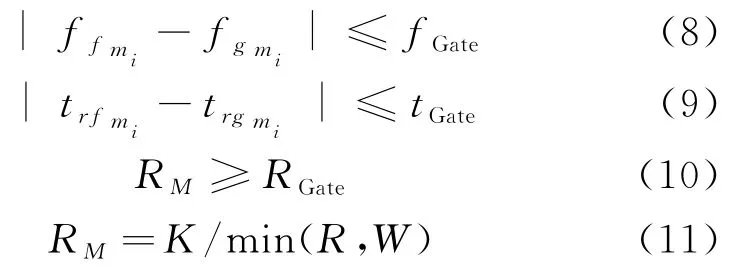
式中:為頻率門限;為到達時間差門限;為匹配比例門限;R 為匹配比例。
若序列的脈沖與Q 序列脈沖成功匹配的脈沖數為U ,=1,2,…,再計算模板序列與匹配序列Q 的脈沖匹配脈沖總個數,則對應模板序列的脈沖匹配個數即為:

(4) 重復步驟(2)~(3),將脈沖匹配個數最多的模板序列作為模板序列輸出。
(5) 在脈沖序列中刪除提取成功的模板以及對應匹配序列,得到當次處理的剩余脈沖。
(6) 剩余脈沖或處理次數滿足退出要求則結束處理,否則重復步驟(2)~(5)。
模板提取算法流程圖如圖2所示。
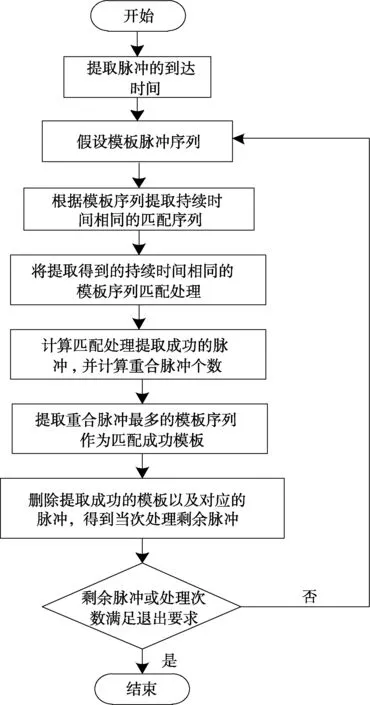
圖2 模板提取算法流程圖
2 仿真數據驗證
為驗證算法的正確性,仿真產生3 個信號,信號的載頻相同且類型均為固定,脈寬均小于0.5μs,重頻類型為參差和組變,仿真信號參數如表1所示。

表1 仿真信號參數
仿真信號全脈沖的頻率和到達時間差圖如圖3所示,從圖3中可以看出:由于3個信號相互交錯,且頻率、脈寬參數相同,脈沖到達時間相互交錯,從到達時間差圖上無法分辨出信號的類型。為了模擬真實環境,在仿真信號中模擬了漏脈沖并增加了隨機噪聲,分析了不同漏脈沖比例和噪聲比例對脈沖分選正確率的影響。
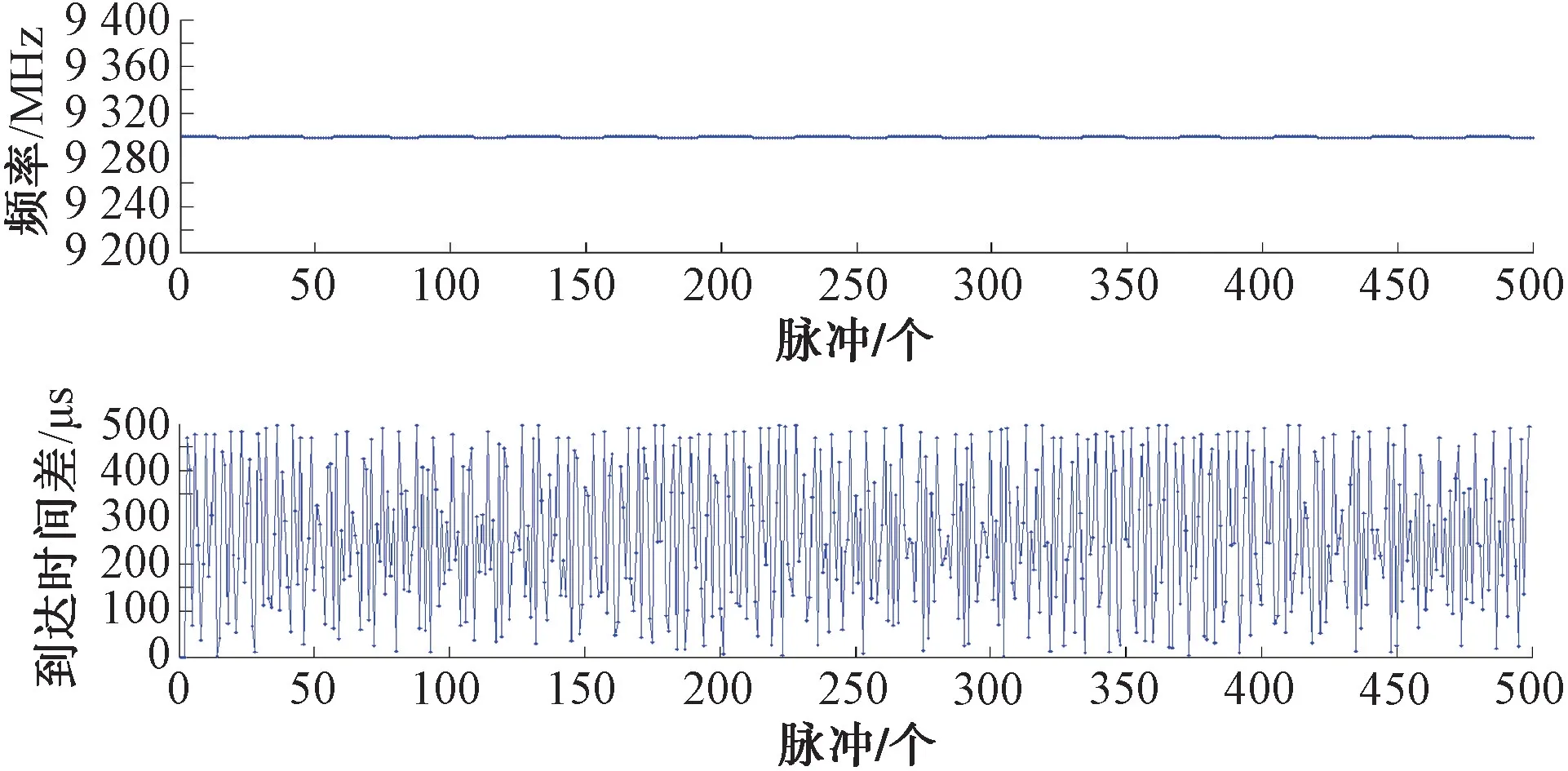
圖3 仿真信號全脈沖頻率與到達時間差圖
不同漏脈沖比例及分選算法的分選正確率如圖4 所示,從圖4 中可以看出:相比常規的CDIF算法和SDIF算法,基于模板提取算法的脈沖分選正確率有明顯提升,漏脈沖比例在小于10%的情況下脈沖分選正確率可達到80%以上,而CDIF和SDIF算法的正確率僅為55%左右,但隨著漏脈沖比例的增加,3種算法的脈沖分選正確率也將隨之降低。
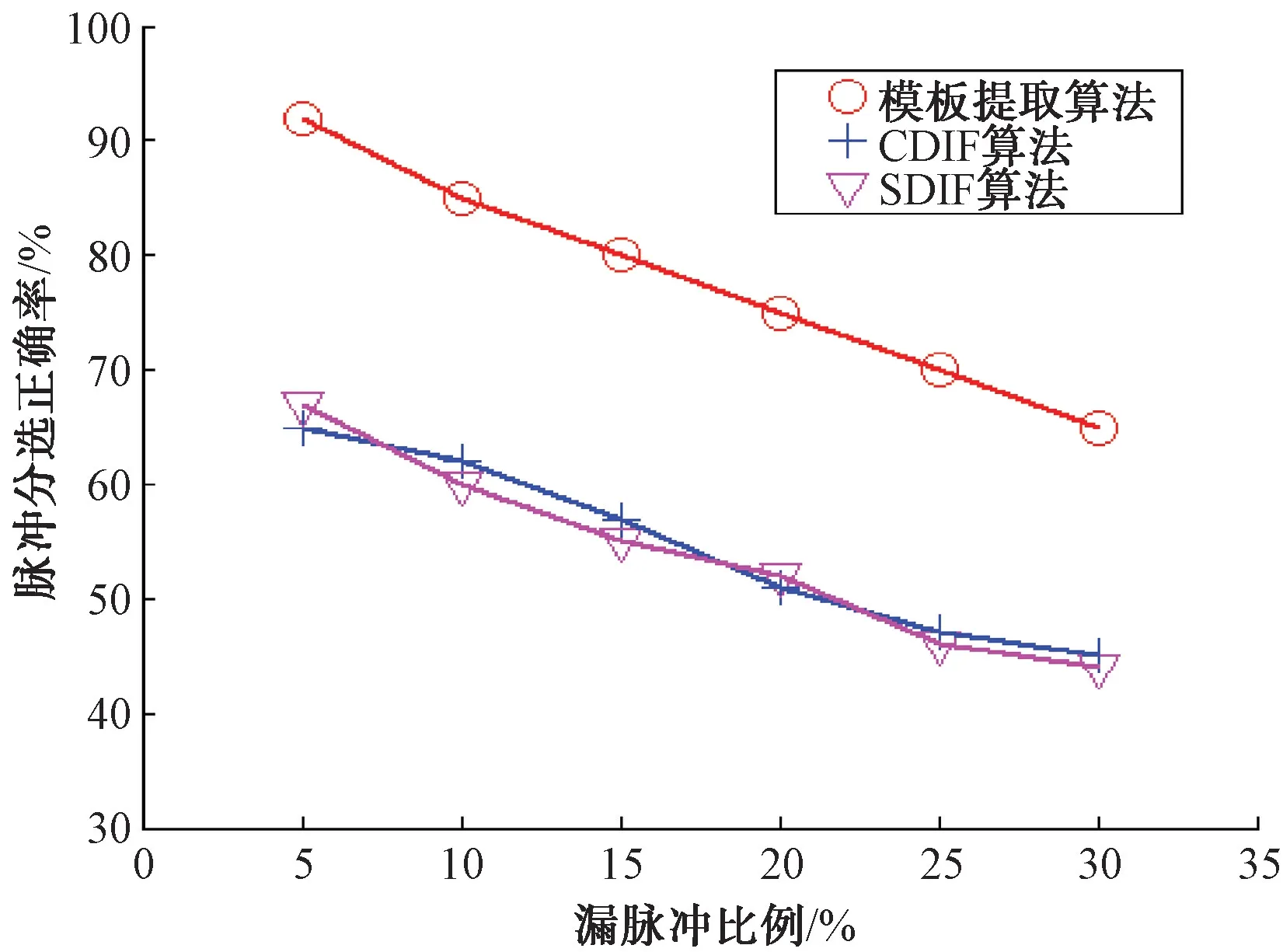
圖4 漏脈沖與分選算法對脈沖分選正確率的影響
圖5所示為在不同漏脈沖比例,噪聲比例分別在5%、10%和20%的場景下的脈沖分選正確率。從圖5可以看出:當漏脈沖比例為5%時,脈沖分選正確率能達到90%左右;而隨著漏脈沖和噪聲比例的增加,尤其是噪聲比例達到20%后,分選正確率急劇下降。可以看出:噪聲比例對脈沖分選正確率的影響要大于漏脈沖比例,原因是隨著噪聲比例的增加,將影響脈沖序列相關的正確性,從而進一步降低脈沖分選正確率。
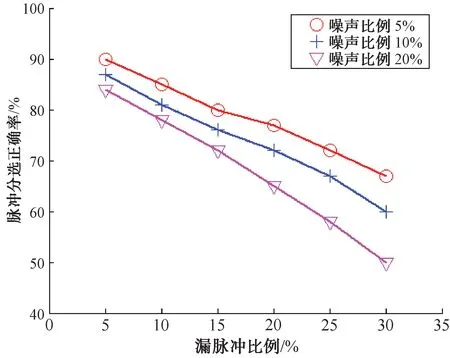
圖5 漏脈沖與噪聲對分選正確率的影響
3 實際數據驗證
以某艦載課題截獲到的雷達信號為研究對象,信號載頻主要集中在漁船導航信號頻段(9 300 MHz~9 500 MHz),脈寬均在1μs以下,實際信號全脈沖頻率與到達時間差圖如圖6所示。
圖6 實際信號全脈沖頻率與到達時間差圖
采用傳統分選算法對該數據進行頻率和脈寬預分選,僅依靠頻率和脈寬無法將信號完全分開,而常規重頻分選難以處理脈沖交錯較為密集的信號,因此常規信號分選難以處理此類信號場景。
模板提取算法得到的信號1~信號6的脈沖截圖如圖7~圖12所示,信號分選得到的信號類型為重頻參差和重頻固定。由圖9~圖12可以看出:由于脈沖重疊的影響,提取得到的模板脈沖序列在個別脈沖出現了提取錯誤。CDIF 算法、SDIF 算法與基于模板提取的分選結果統計如表2所示,從中可以看出:基于模板提取的算法分選正確率可達到80%以上,而常規分選正確率不超過50%。這是因為傳統算法難以對頻率和脈寬維度無法區分的脈沖進行正確分選,使得在重頻處理時易將參差信號誤處理為抖動信號,導致分選正確率較低。而本文算法充分利用信號脈沖到達時間相關性規律對脈沖去交錯,解決在頻率和脈寬維度難以區分的信號分選難題,顯著提升了脈沖分選正確率。
圖7 模板提取算法的第1個信號
圖8 模板提取分選算法的第2個信號
圖9 模板提取分選算法的第3個信號
圖10 模板提取算法的第4個信號

圖11 模板提取算法的第5個信號
圖12 模板提取算法的第6個信號

表2 傳統算法與基于模板提取的信號分選統計表
4 結束語
本文基于模板提取的思想提出了一種信號分選新算法,算法認為雷達信號是在基于模板脈沖進行重復變化,在該假設的基礎上進行模板脈沖提取。由于算法是通過脈沖到達時間的變化提取模板,不依賴于脈沖頻率、脈寬和方位信息,即使在頻率、脈寬等信息難以區分的情況下仍能夠實現信號的正確分選,提升了信號分選的適應能力。仿真與實際數據驗證表明,該算法在信號密集且頻率、脈寬參數交疊的情況下仍能取得較好的效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06