電子穩定平臺在無人船干擾設備上的應用
2022-03-31 12:02:46力沈佳琪戴
艦船電子對抗 2022年1期
關鍵詞:設備
姚 力沈佳琪戴 歡
(中國船舶集團有限公司第八研究院,江蘇 揚州 225101)
0 引言
無人艇出現較晚但發展迅速,相比其他移動式觀測平臺,無人值守的特性決定了其具有良好的環境適應性和經濟性。它行動靈活快速,在危險海域、惡劣環境下具有無可比擬的巨大優勢。無人船也存在一定劣勢,體積小,靈活的同時受海情水況影響更劇烈,對船載設備的體積、質量、精度以及靈活性、反應速度要求更高。電子穩定平臺省去了機械結構,通過姿態傳感器實時測量船體縱、橫搖等姿態信息,并進行坐標變換,直接補償給方位及俯仰控制器,實現精確跟蹤。
1 干擾指向設備伺服控制基本原理
偵察設備發現目標,并將目標信息(方位、俯仰)送給干擾設備;干擾設備根據偵察設備的位置信息對目標信息進行解算,得到目標點相對于自身的方位、俯仰信息,并結合船身的縱橫搖進行補償;最后控制執行機構進行動作,實現對目標的跟蹤及干擾。如圖1所示,、分別為偵察設備、干擾設備位置,為目標點,以、為原點分別建立、坐標系,、分別為(目標點)在2個坐標系上的投影,、、、分別為目標點對應2個坐標系的俯仰、方位角。

圖1 偵察設備目標解算
為大地直角坐標系,指向直角坐標系,沿鉛垂線向上,按右手定則確定。
2 縱橫搖補償坐標變換[5-6]
2.1 極坐標與直角坐標轉換
如圖2 所示,將點的直角坐標轉換為極坐標:

圖2 直角坐標與極坐標
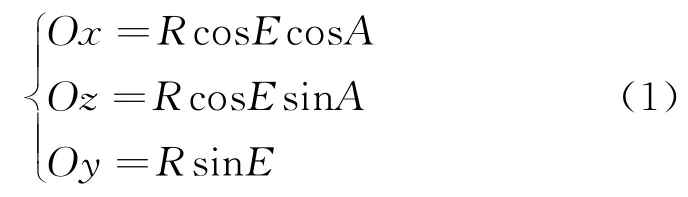
式中:為目標點距坐標原點的距離;為俯仰角;為方位角。
2.2 縱橫搖補償[7]
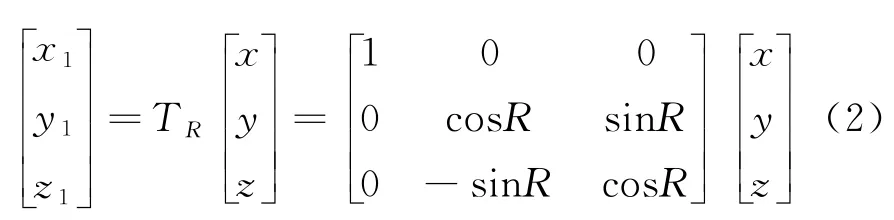
(1) 橫搖角影響
僅橫搖角影響時,認為是繞軸旋轉,軸方向分量不變,和軸轉角度。設變化前直角坐標為(,,),變化后為(,,),可得:
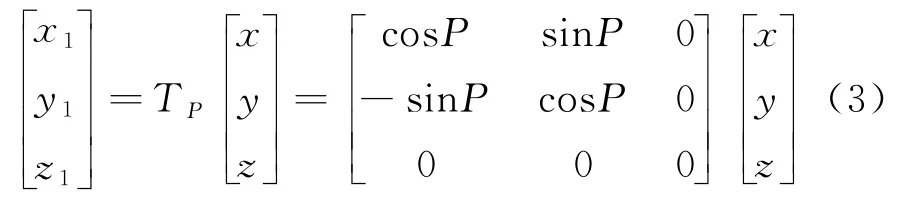
(2) 縱搖角影響
僅縱搖角變化時,可看做繞軸旋轉,軸方向分量不變,和軸轉角度。設變化前直角坐標為(,,),變化后為(,,),可得:
(3) 航向角影響
僅航向角變化時,可看做繞軸旋轉,軸方向分量不變,和軸轉角度。設變化前直角坐標為(,,),變化后為(,,),可得:
(4) 縱橫搖以及航向的影響為:

式中:(,,)為極坐標系下的目標位置。
將式(1)、(2)、(3)、(4)代入式(5)可得:
為計算方便,進行歸一化處理,將距離參數舍去。
(5) 航向及縱橫搖補償后的俯仰、方位計算:
3 MATLAB仿真驗證與DSP實現
3.1 仿真與驗證
基于MATLAB/Simulink編寫m 語言程序對坐標變換公式進行仿真驗證。圖3和圖4分別為仿真模型和縱橫搖角度變化對方位俯仰角度變化影響的仿真結果。
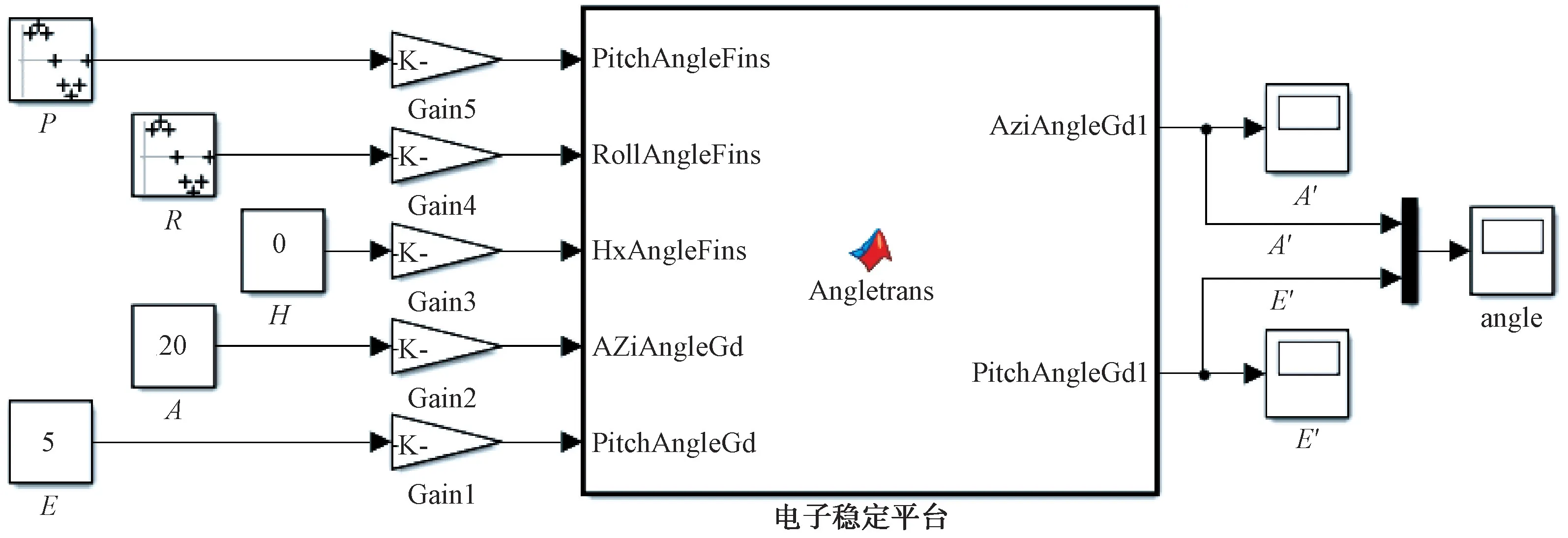
圖3 電子穩定平臺MATLAB/Simulink仿真
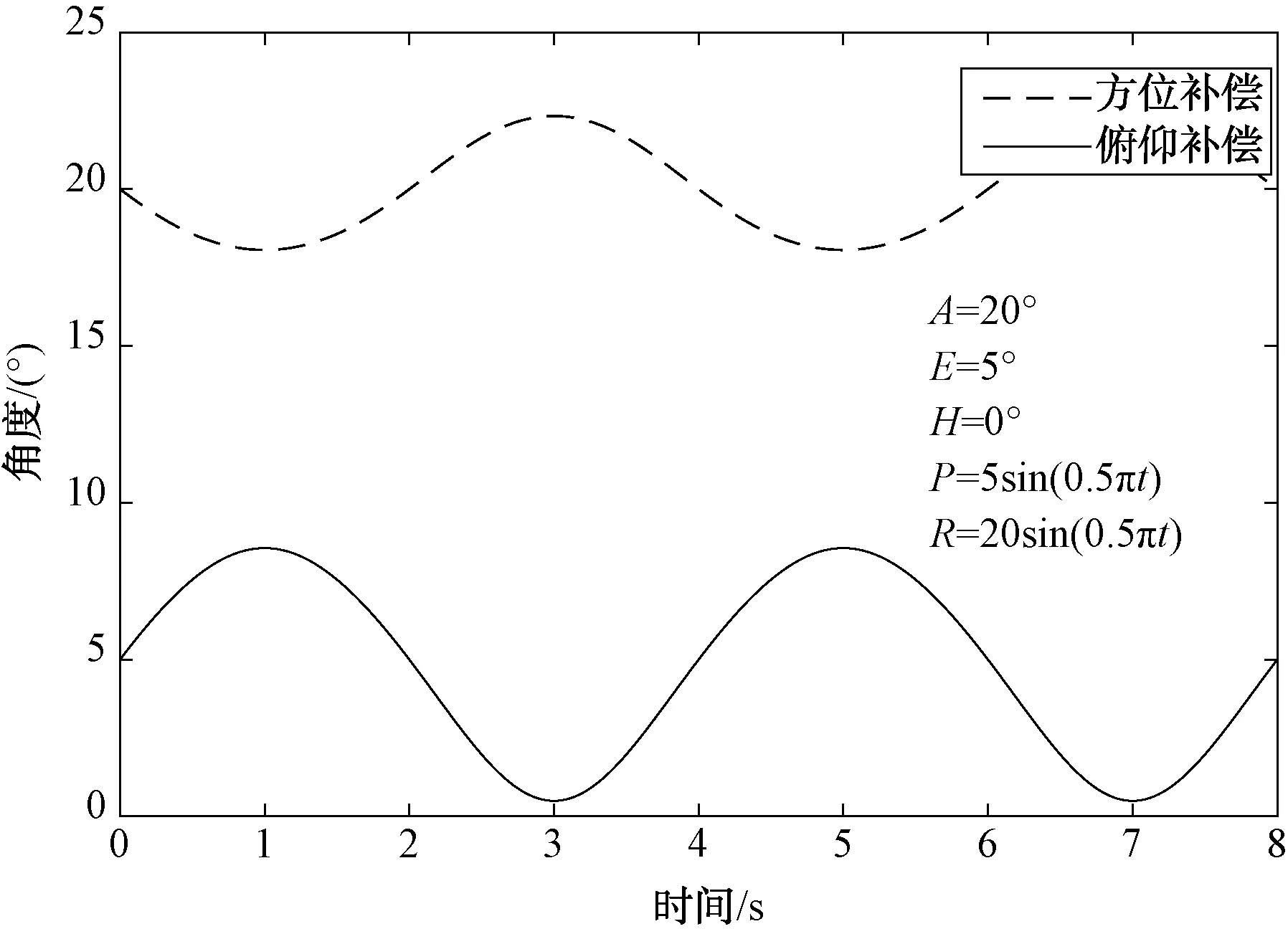
圖4 方位、俯仰的縱橫搖補償
利用MATLAB/Embeded Coder Toolbox,將MATLAB文件進行編譯,直接下載到DSP28335進行測試。方位角、俯仰角、航向角保持不變,改變縱橫搖角度,對方位、俯仰角度進行補償計算,部分結果如表1所示。

表1 縱橫搖補償運算結果
表1對計算結果采用小數點后3位,方位、俯仰補償的數字信號處理(DSP)計算誤差均小于0.001,可以滿足后續伺服控制系統的精度要求。
3.2 試驗結果及分析
無人船載設備拋錨在一固定點位,給定一連續的虛擬目標航跡,干擾設備伺服機構動作,指向目標位置,實現干擾設備對目標的跟蹤和實時干擾,部分實驗數據見表2~表5。由實驗及計算結果可知,跟蹤誤差小于2°,滿足設計精度要求。圖5、圖6分別為設備指向的方位俯仰實際角度以及與目標角度的誤差。

表2 設備位置GPS信息

表3 目標位置GPS信息

表4 無人船載設備姿態數據

表5 方位數據及誤差

表6 俯仰數據及誤差

圖5 方位角度及誤差
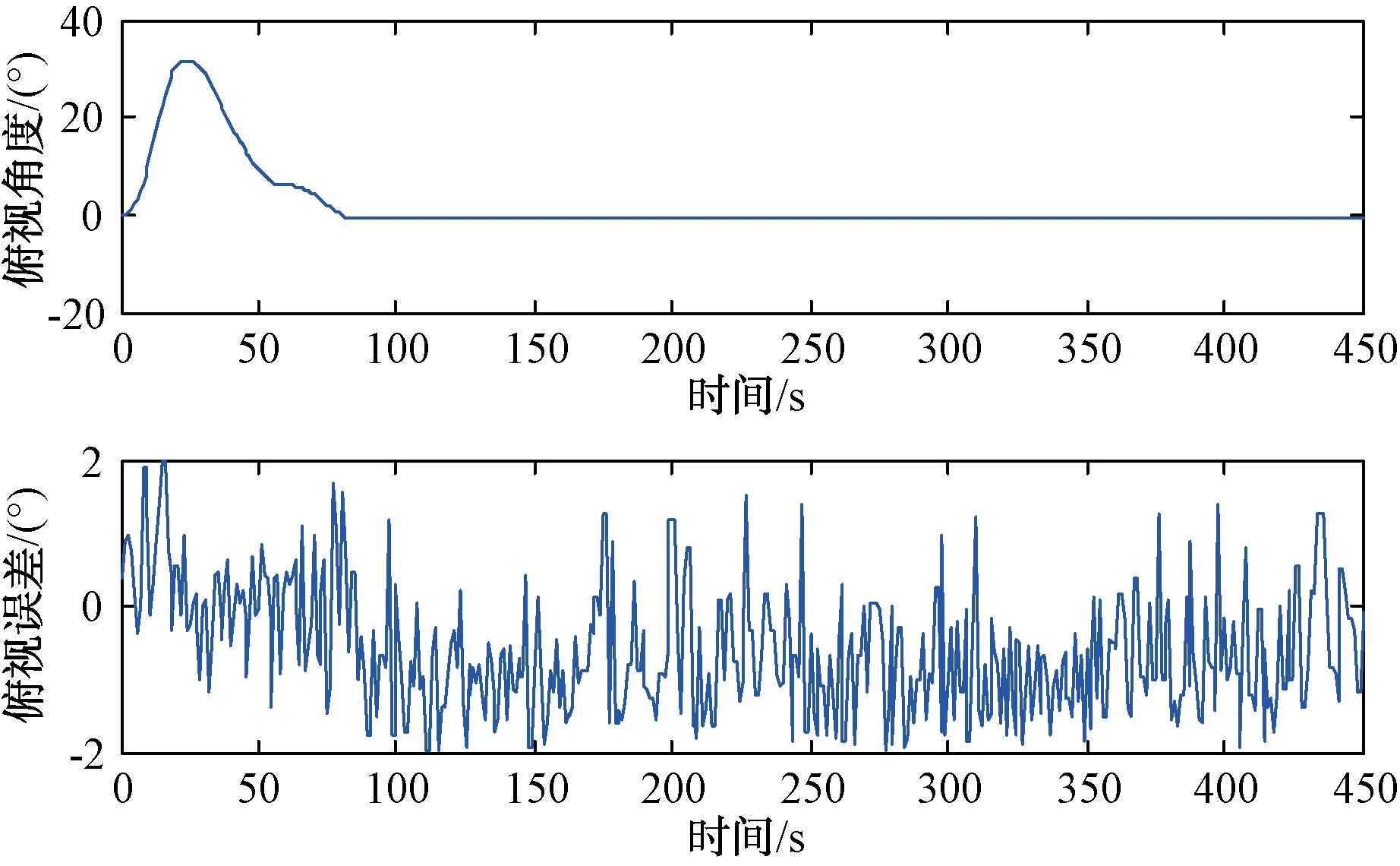
圖6 俯仰角度及誤差
4 結束語
本論文論述了一種基于無人船干擾設備的電子穩定平臺的實現方法,仿真測試及試驗結果顯示,該方法可以有效地實現船體縱橫搖及航向變化對干擾設備方位俯仰的干擾補償,在實際應用中效果良好,有效補償了船體縱橫搖對無人船載設備的影響。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00