固體智能充填自主夯實過程機構干涉影響因素與調控方法
2022-04-01 12:19:42張吉雄王宏奇王云搏孫忠良時培濤魏連河
煤炭學報 2022年3期
張 強,劉 勇,張吉雄,張 昊,殷 偉,王宏奇,王云搏,孫忠良,時培濤,魏連河
(1.中國礦業大學 礦業工程學院,江蘇 徐州 221116;2.中國礦業大學 深部煤炭資源開采教育部重點實驗室,江蘇 徐州 221116;3.淮陰工學院 交通工程學院,江蘇 淮安 223003;4.冀中能源股份有限公司邢東礦,河北 邢臺 054000;5.鄭州合新科技有限公司,河南 鄭州 450001)
隨著智能開采技術發展與智慧礦山建設,國家對大宗固廢綠色規模化處置及地表沉陷控制等源頭治理技術需求與日俱增,對高效智能充填開采的硬性需求迫在眉睫。傳統固體充填開采技術存在充填效率較低、充填效益不理想等技術升級需求,智能固體充填是解決上述需求的有效途徑。
目前,我國應用充填技術進行開采的煤礦約75座,其中采用固體充填開采方式約43座,占一半以上。充填開采面臨著大采高、薄煤層、巨厚煤層以及破碎頂板等各種地質條件,充填裝備適應性各不相同,智能固體充填開采方法需適應多種采礦地質條件。智能固體充填實現的前提是固體智能充填機械裝備自主流暢運行。
目前,學者們針對充填裝備及其自動化方面進行了大量研究,王曉峰等利用SolidWorks軟件對卸料口進行三維建模,分析并設計了卸料口控制機構的最優結構;張東升等研究了多孔底卸式輸送機圓環鏈在最危險工況、中部槽在開啟和關閉狀態的受力及位移情況;郭波設計優化了充填刮板輸送機的中部槽結構,使得卸料效果最優。固體充填液壓支架研究方面,王慧等通過虛擬樣機正交試驗法研究了ZZC8800/20/38型六柱式充填液壓支架后頂梁的外載作用點位置對其受力影響程度;張強等對比了傳統液壓支架與固體充填液壓支架的架型結構及控頂特性,設計了支架工作阻力確定方法流程。焦山林等通過對充填液壓支架堆積—壓實物料過程的分析,設計開發了綜合機械化固體充填液壓支架自動控制系統;劉建功等提出了固體自動充填系統的控制策略及控制方案。張強等基于固體智能充填的內涵,設計了固體智能充填開采方法。
綜上可知,目前研究尚未針對充填工藝執行過程中機構間相互干涉影響問題進行研究。
機構干涉的自我調控是實現充填裝備間流暢穩定運行的前提,是充填裝備參數識別及智能感知設計的基礎。
筆者基于團隊大量固體充填開采工程實踐,通過模擬多因素條件下自主夯實過程中機構間的工況,重點研究地質條件、架型結構、充填系統布置及工藝參數等因素對機構干涉產生的影響,給出相應條件下機構干涉調控方法,為固體智能充填技術提供理論基礎。
1 機構干涉影響智能化進程分析
1.1 裝備工作狀態的影響
“移動充填液壓支架—卸料—夯實—推移多孔底卸式輸送機”等采充工序由固體充填液壓支架、夯實機構及多孔底卸式輸送機等關鍵裝備配合完成,若相互之間發生機構干涉,則正常工作狀態被打斷,如夯實機構的夯實頭被充填物料填埋導致夯實機構無法順利伸出、夯實機構伸出時與多孔底卸式輸送機發生碰撞等,各種不同干涉狀態都會影響充填裝備的正常工作狀態,甚至導致機構損壞等。
1.2 自動充填工藝執行的影響
在自動工藝執行過程中,機構干涉的產生具有多樣性和瞬時性。若發生嚴重機構干涉,正在執行工藝的程序將會終止,導致工序停止,現階段只能依靠人工干預解決機構干涉問題,機構干涉嚴重影響了自動充填工藝的流暢執行。
1.3 充填效率的影響
充填效率采用單位時間內充入的充填物料體積來進行表征。充填裝備流暢安全運行是實現充填智能化并獲得較高充填效率的前提。
機構干涉產生于充填工藝各個過程,其干涉形式、嚴重程度及對應的解調方式各不相同。傳統充填工序執行過程中,若發生機構干涉,則依靠人工干預與調節,占用采充工序的執行時間,影響充填與采煤協同作業,導致充填效率降低。
2 機構干涉影響因素及仿真模擬方案
2.1 機構干涉影響因素
不同礦區,其埋深、煤層傾角和頂板破碎程度以及所采用的關鍵充填裝備的型號等顯著不同;某一礦區同一礦井不同充填工作面,其充填系統布置和工藝參數亦不相同,由此對應干涉位態及干涉發生幾率均各不相同。
影響固體充填裝備干涉發生的主要因素包含地質條件、架型結構、充填系統布置及工藝參數、其他因素等四大類,如圖1所示;對充填裝備的影響示意如圖2所示。
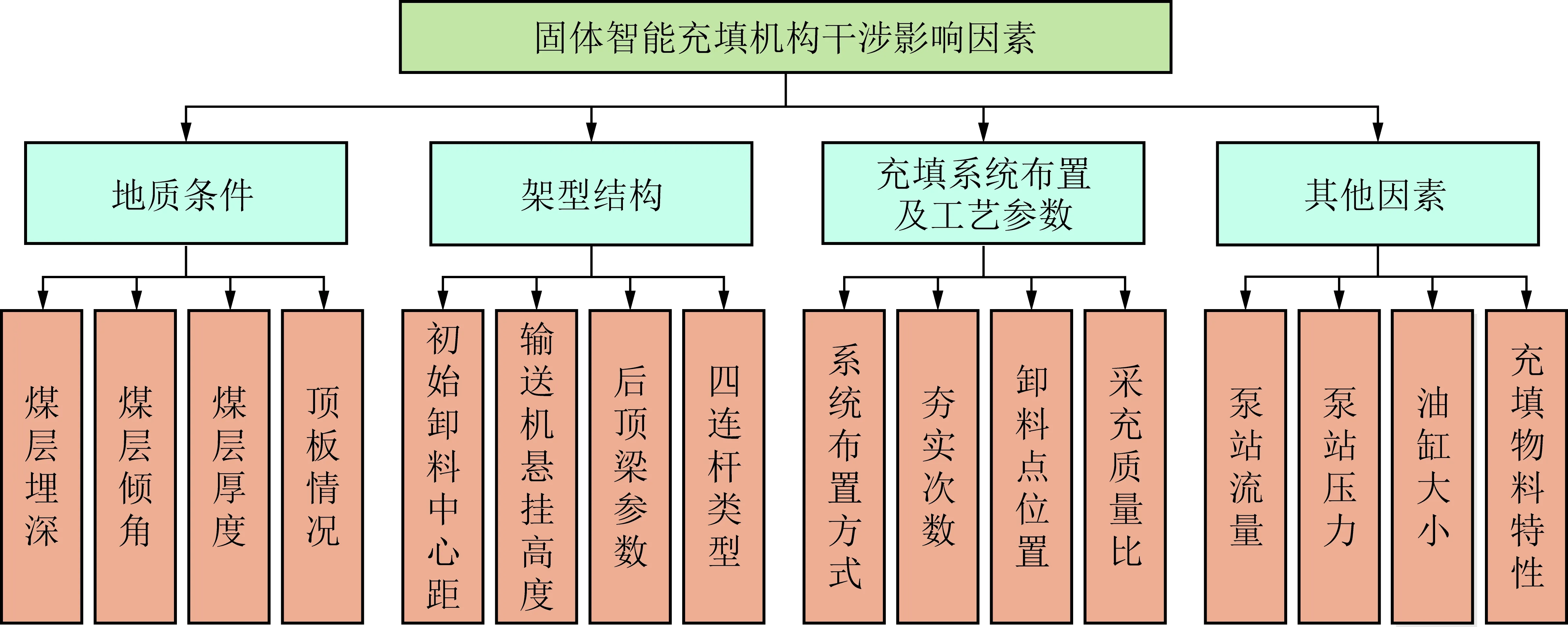
圖1 干涉影響因素構成Fig.1 Influencing factors of interference

圖2 干涉影響示意Fig.2 Schematic diagram of interference influencing
2.2 機構干涉影響的研究思路
研究機構干涉的影響應從以下幾步入手:① 在經驗數據和現場實踐的基礎上總結出機構干涉的影響因素;② 在Pro/E中建立充填液壓支架的三維模型;③ 通過采用Pro/E的運動仿真模塊確定機構干涉的多種典型位態;④ 建立不同工況下夯實機構的運動軌跡,結合運動仿真及工程實踐結果量化分析了某一干涉判別準則下機構干涉狀態的影響因素。
支架在進行充填作業時,會產生多種干涉位態,本文通過工藝仿真模擬支架在不同干涉位態的工作狀態,并針對每一類干涉位態研究不同影響因素對干涉產生的影響。
通過運動仿真研究干涉問題,仿真過程中,不同影響因素的實現方式如下:
(1)地質條件,采高通過改變立柱的支撐高度進行實現;煤層傾角通過改變支架的傾斜程度來實現;頂板破碎情況通過改變充填液壓支架的后頂梁提前下沉旋轉角來量化等。
(2)架型結構,卸料中心距通過改變多孔底卸式輸送機的滑移油缸來實現;多孔底卸式輸送機懸掛高度通過改變模型建立時鏈條的長度來實現;后頂梁參數等通過改變模型建立時后頂梁的尺寸關系,如頂梁的長度、厚度及角度來表征;不同的支架架型,通過各部件重新裝配實現。
(3)充填系統布置及工藝參數,通過改變支架的傾斜角度及工作方向實現仰采俯充及俯采仰充工藝等。
以ZC5160/30/50四柱正四連桿充填液壓支架為原型,量取前頂梁長度、后頂梁長度、底座鉸接高度、懸掛高度、夯實機構伸出和收回長度等尺寸參數,按照1∶1的比例在Pro/E軟件中建立支架各部件的實體模型,并根據各機構之間的相互約束及定位關系將各部件的實體模型進行裝配,得到四柱正四連桿充填液壓支架。
2.3 機構干涉判別準則及調控路徑求解方法
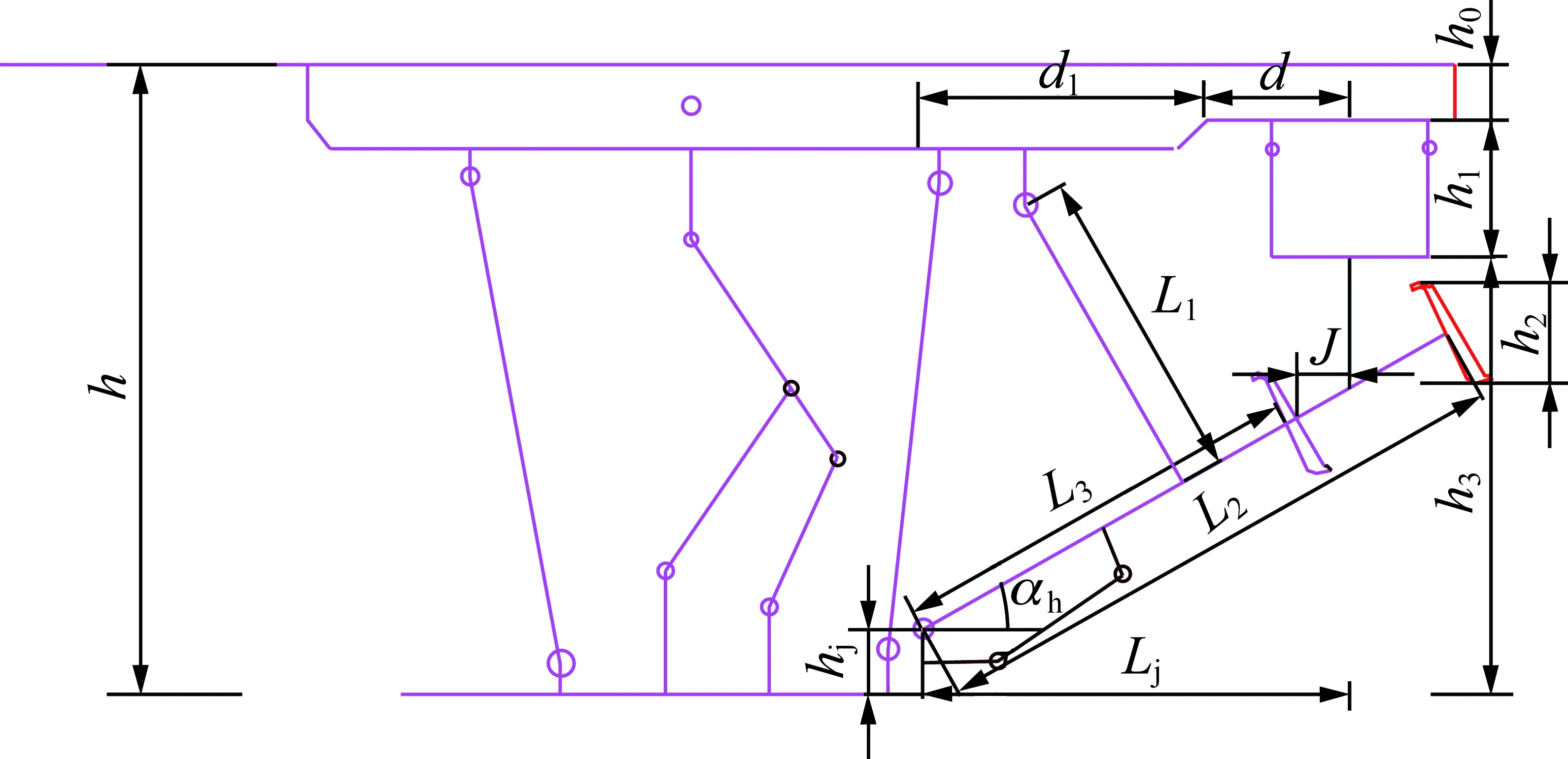
圖3 四柱正四連桿充填液壓支架骨架模型Fig.3 Skeleton model of four column four link hydraulic support
基于Pro/E的不同因素條件下固體機械夯實動態仿真結果及固體機械夯實工程經驗,機構干涉主要分為4類干涉位態。為定量闡述機構干涉問題,在實體模型基礎上進一步構建骨架模型如圖3所示,圖3中,為夯實機構擺梁長度,mm;為夯實機構伸出后長度,mm;為夯實機構完全縮回后長度,mm;為多孔底卸式輸送機卸料中心距,mm;為夯實機構夯實角度,(°);為支架工作高度或者開采高度,mm;為支架頂梁厚度,mm;為多孔底卸式輸送機懸掛鏈長度,mm;為夯實機構夯實板垂直高度,mm;為多孔底卸式輸送機懸掛高度,mm;為落料間隙距,mm;為夯實機構鉸接高度,mm;為多孔底卸式輸送機滑道到夯實機構鉸接處的間距,mm;為多孔底卸式輸送機滑移距離,mm。
基于支架骨架模型,建立機構靜態方程:
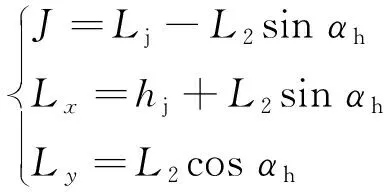
(1)
式中,,分別為對應夯實機構按照為伸出后夯實頭在水平及垂直方向的軌跡位置,mm。
隨著地質條件、架型結構、充填系統布置及工藝參數的不同,支架的靜態、動態參數也會產生相應的變化。因此,基于支架動態仿真結果,結合煤層傾角、頂板破碎狀態條件變化,建立不同工況下夯實機構運動的軌跡方程:
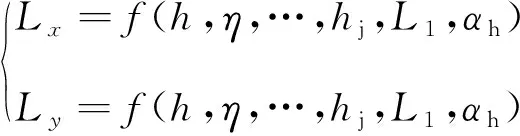
(2)
基于工程經驗結合支架夯實過程三維動態仿真,定義每種干涉狀態下機構動作的安全距離臨界(如,0,0,0等),即機構在該范圍內動作不會產生干涉,并與機構實際動作距離進行比較,得到了4類干涉位態的判別準則。
進一步,對4類干涉狀態下夯實機構的動態運動軌跡進行分析,并與干涉判別準則進行對照,得到干涉位態的參數化解調路徑見表1。
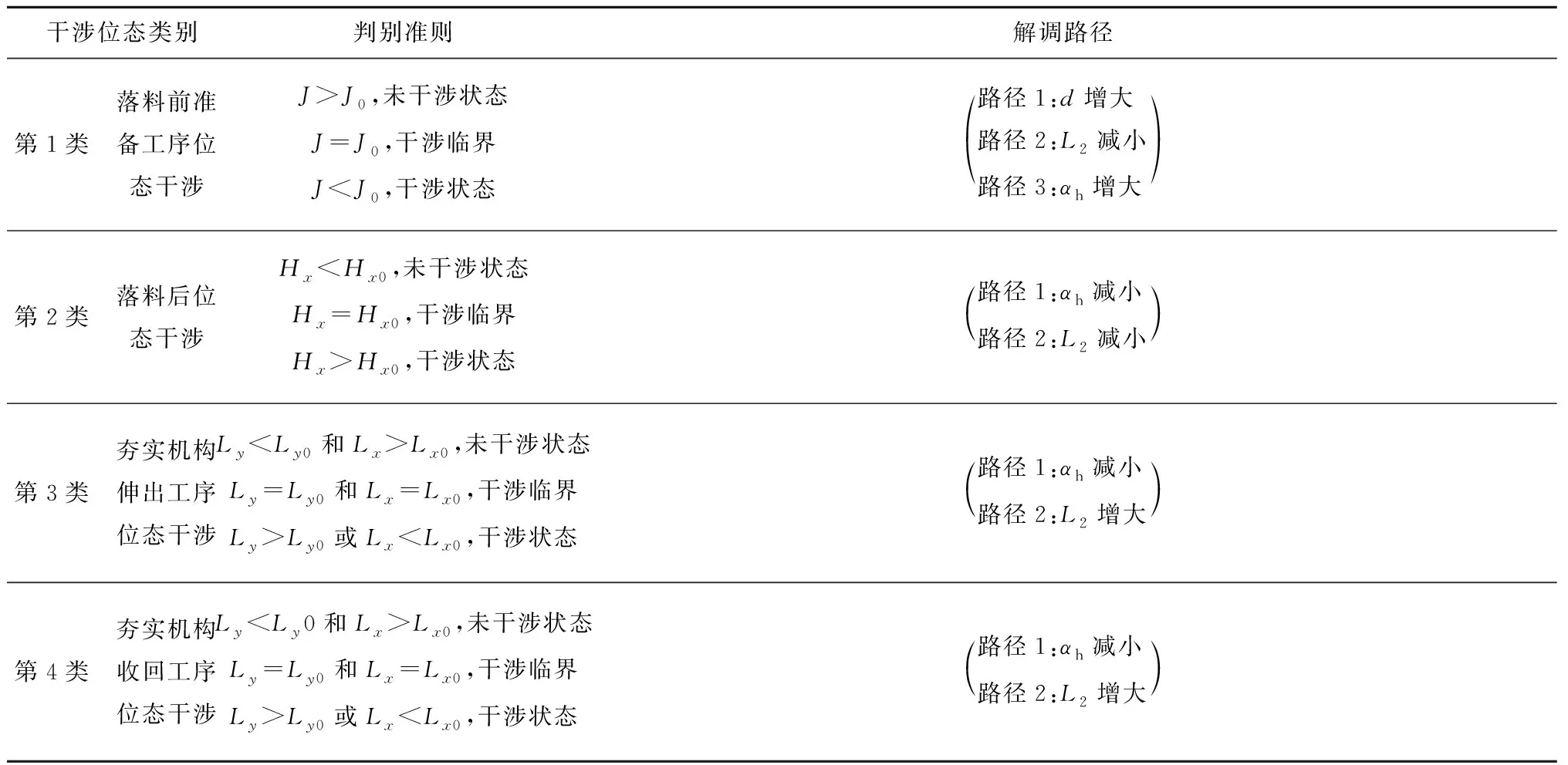
表1 干涉位態判別準則及解調路徑Table 1 Discrimination criteria and demodulation path of four types of interference state
2.4 機構干涉影響因素分析方案
為明確機構干涉的尺度大小,基于2.3節干涉判別準則,擬采用控制變量法,對不同因素影響支架運行狀態等進行方案設計,筆者提出采用干涉臨界范圍、干涉幾率來進行具體量化分析干涉程度的大小。其中干涉臨界范圍指的是機構動作未達到安全距離臨界時,機構可活動的范圍;干涉概率指的是某一特定位態下機構動作產生干涉的可能性大小,其定義為

(3)
本文將重點從煤層傾角、頂板破碎(采用后頂梁下沉旋轉角量化,具體采用表示)及架型結構3個角度來進行具體分析,分析方案見表2。

表2 煤層傾角/頂板破碎/架型影響干涉方案設計Table 2 Scheme design of influence of coal seam inclination/roof breakage on interference/frame type
3 機構干涉影響因素量化分析
3.1 地質條件
地質條件對干涉狀態的影響主要表現為煤層厚度、煤層傾角、頂板破碎情況及埋深等。
..煤層厚度
煤層厚度不同,充填液壓支架的工作狀態不同,固體充填液壓支架較適宜的開采高度為1.6~4.5 m,當煤層厚度較小而夯實結構長度一定時,夯實結構最大允許仰角較小,容易發生第2,3,4類干涉。
..煤層傾角
根據綜合機械化固體充填采煤技術要求,充填工作面一般采用仰采俯充布置,若采用俯采仰充,其角度應不大于15°。因此,研究煤層傾角對機構干涉影響分為2種情形:一種是仰采俯充,一種是俯采仰充。
仰采俯充時(圖4),多孔底卸式輸送機偏向采空區側,煤層仰角越大,多孔底卸式輸送機偏離程度越大,越不容易產生干涉,越有利于實施充填。
俯采仰充時(圖5),多孔底卸式輸送機偏向煤壁側,煤層俯角越大,多孔底卸式輸送機偏斜程度越大,夯實機構與其之間的距離越近,使得落料間隙距減小,夯實機構水平伸出的安全距離減小,越易產生干涉。上述發生干涉的具體表現分析如下:
(1)第1類:落料前準備工序位態干涉。傾斜煤層采用俯采仰充工藝時,煤層傾角為,多孔底卸式輸送機偏移角為,落料間隙距用表示,在落料準備工序過程中,未干涉時,夯實頭的動態軌跡需滿足:

圖4 仰采俯充支架工作示意Fig.4 Working diagram of support for upward mining and downward backfilling
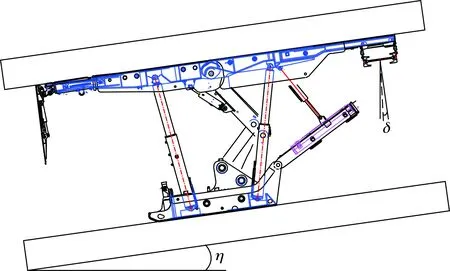
圖5 俯采仰充支架工作示意Fig.5 Working diagram of support for downward mining and upward backfilling
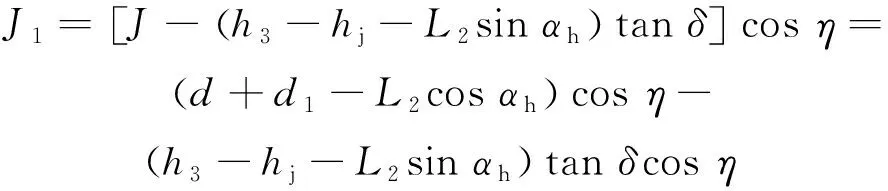
(4)
≥
(5)

(6)
傾斜煤層采用仰采俯充工藝時,落料間隙距用表示,在落料準備工序過程中,未干涉時,夯實頭的動態軌跡需滿足:
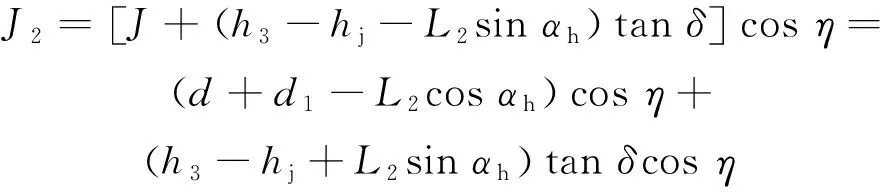
(7)
≥
(8)

(9)
由式(6),(9)分析可知,除表1所列出的干涉解調路徑外,盡量減小煤層傾角,保證足夠的落料間隙距,也可達到減少干涉發生次數的目的。
(2)第2類:落料后位態干涉。在落料完成工序過程中,未干涉時,夯實頭的動態軌跡需滿足:
(10)
由式(10)可知,減小煤層傾角,可以使落料高度盡量小于安全高度,避免產生第2類位態干涉。
(3)第3類:夯實機構伸出工序位態干涉。在傾斜煤層俯采仰充采煤工藝中,未干涉時,夯實頭的動態軌跡需滿足:
(11)
在傾斜煤層仰采俯充過程中,未干涉時,夯實頭的動態軌跡需滿足:
(12)
由式(11),(12)分析可知,增大煤層傾角,可以使夯實機構伸出的水平距離減小,豎直位移增大,減少夯實頭與多孔底卸式輸送機的碰撞,降低干涉發生的幾率。
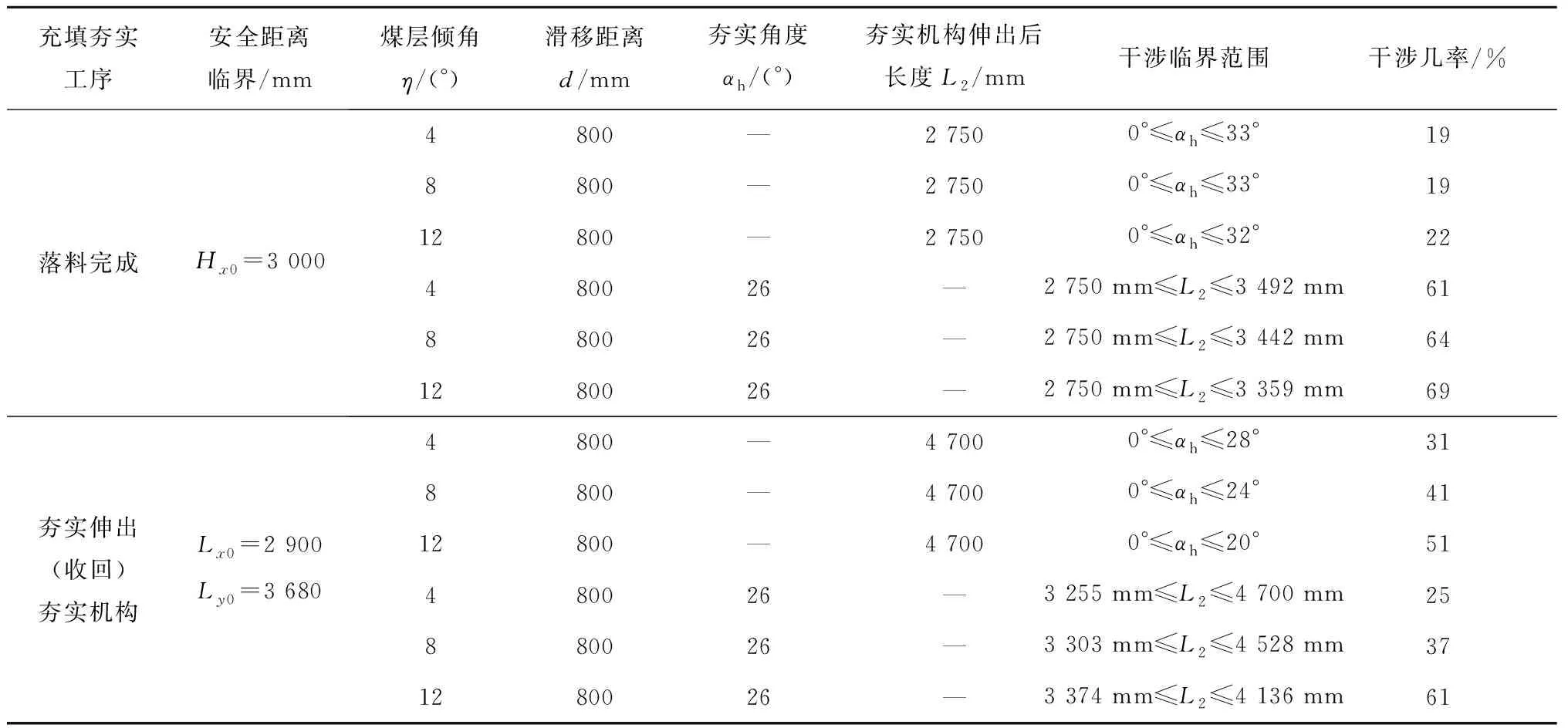
(4)第4類:夯實機構收回工序位態干涉。該干涉狀態分析與第3類一致,不做贅述。結合第2節建立的機構干涉判別準則及調控路徑求解方法,以俯采仰充為例,參照方案一的研究思路,定量化分析得到各個工序動作下,不同煤層傾角干涉臨界范圍與干涉幾率,具體見表3,其中,多孔底卸式輸送機滑移距離的理論可動作范圍為225~800 mm;夯實機構夯實角度的理論可動作范圍為0°~41°;夯實機構伸出后長度的理論可動作范圍為2 750~4 700 mm。由表3可知,隨著煤層傾角的增大,相關參數的干涉臨界范圍越來越小,機構干涉的幾率則越來越大。
..頂板條件
若頂板條件較差,則頂板發生提前破斷(圖6),支架承受載荷加大,后頂梁沿鉸接處下沉較大,此時充填液壓支架前后頂梁不平整,多孔底卸式輸送機整體高度下降,越發靠近夯實機構,干涉更易發生,具體表現如下:
表3 煤層傾角對干涉判別準則及調控路徑的影響(以俯采仰充為例)Table 3 Influence of coal seam dip angle on interference criterion and adjustment path
續表
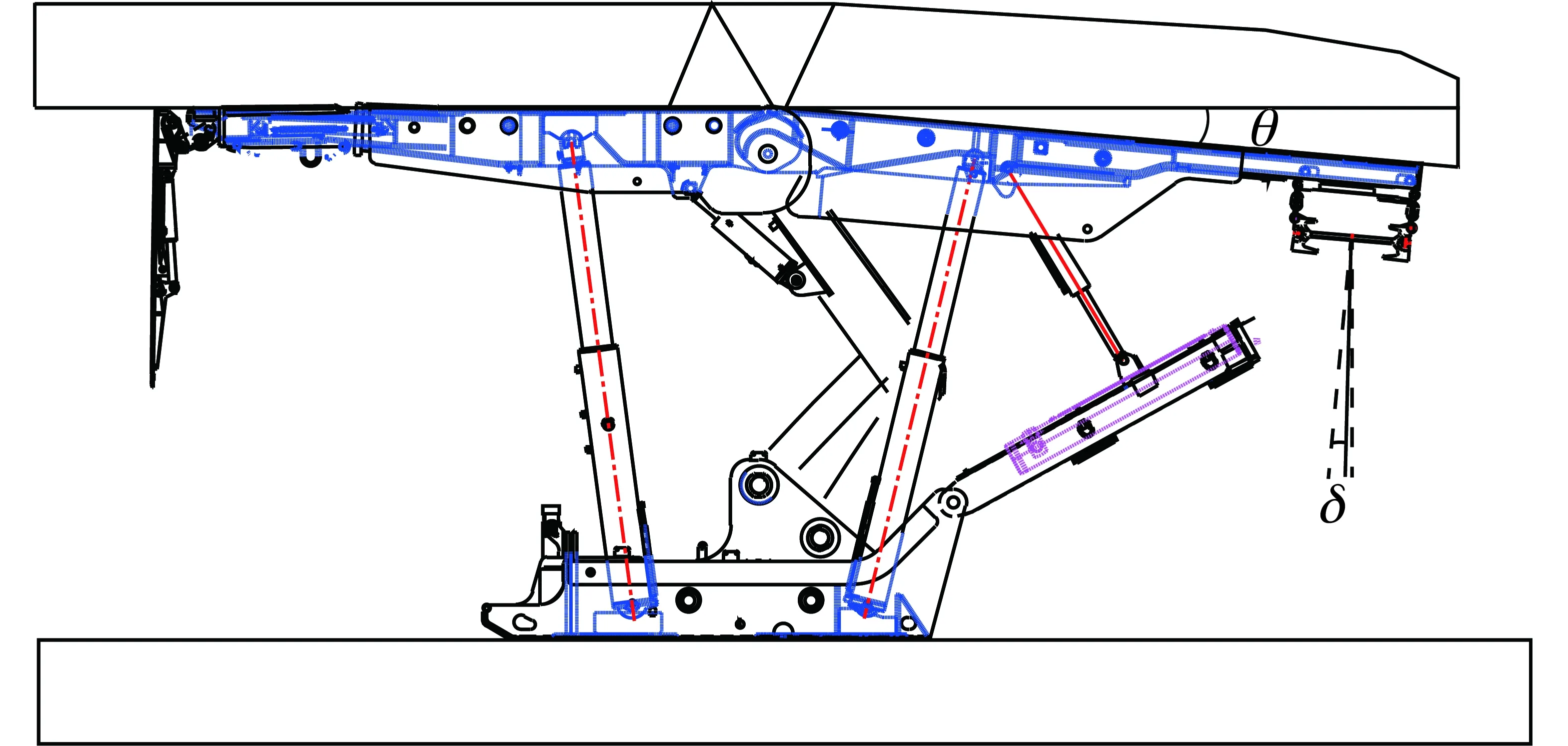
圖6 近水平煤層頂板破碎時支架示意Fig.6 Schematic diagram of support in near horizontal coal seam with broken roof
(1)第1類:落料前準備工序位態干涉。頂板發生破碎時,落料間隙距用表示,在落料準備工序過程中,未干涉時,夯實頭的動態軌跡需滿足:

(13)
≥
(14)

(15)
(2)第2類:落料后位態干涉。頂板破碎時,落料完成工序過程中,未干涉時,夯實頭的動態軌跡需滿足:

(16)
(3)第3類的夯實機構伸出工序位態干涉與第4類的夯實機構收回工序位態干涉中,夯實機構夯實頭與多孔底卸式輸送機咬合干涉狀態分析中,未干涉時,夯實頭的動態軌跡與頂板不破碎時動態軌跡及干涉路徑相同。
由式(15),(16)分析可知,在充填作業過程中,盡量控制頂板的破碎程度,防止后頂梁提前下沉,可以減少干涉的發生。
結合第2章建立的機構干涉判別準則及調控路徑求解方法,參考方案2的研究思路,定量化分析了各個工序動作下不同頂板破碎狀態干涉臨界范圍與干涉發生幾率,具體見表4。
由表4分析可知,頂板破碎程度對于落料準備工序的影響不大,但對落料完成工序影響較大,其中,多孔底卸式輸送機的滑移距離對其最為敏感。
3.2 架型結構
架型結構對干涉狀態的影響主要取決于初始卸料中心距、輸送機懸掛高度、后頂梁參數和四連桿類型等指標。
(1)初始卸料中心距。主要由多孔底卸式輸送機滑道到夯實機構鉸接處的間距和多孔底卸式輸送機滑移距離組成。該距離不僅影響落料位置,而且初始卸料中心距越小,夯實結構的最大允許仰角越大,不容易產生第3,4類干涉,但由于落料中線距夯實頭距離減小,落料間隙距減小,使得第1類干涉發生幾率加大。
(2)輸送機懸掛高度。多孔底卸式輸送機懸掛高度直接影響夯實機構的最大允許仰角,懸掛高度越低,允許落料高度越低,且夯實機構在伸出和收回過程中與其發生碰撞的幾率越大,容易產生第2,3,4類干涉。
(3)后頂梁參數。后頂梁參數主要包括后頂梁的長度、厚度及角度,不同的后頂梁參數對支架的工作狀態有著不同的影響,后頂梁長度越短,落料間隙距越小,容易發生第1類位態干涉;厚度及角度越大,多孔底卸式輸送機的懸掛高度越低,夯實機構的最大允許仰角越小,容易發生第2,3,4類干涉。

表4 頂板破碎程度對干涉判別準則及調控路徑的影響Table 4 Influence of the degree of roof breakage on the interference criterion and adjustment path
(4)四連桿類型。不同的支架類型,對應四連桿機構及支架頂梁的雙紐線運動軌跡也不相同。為了更直觀的反應架型結構對干涉判別準則及調控路徑的影響,結合第2章建立的機構干涉判別準則及調控路徑求解方法,同時,參考方案3的研究思路,以ZC5160/30/50四柱正四連桿、ZC4800/16/30六柱正四連桿、ZZC9600/16/32六柱反四連桿3類支架為研究對象,定量化分析了各個工序動作下,不同支架類型干涉臨界范圍與干涉發生幾率,具體見表5。
其中,3類支架對應的多孔底卸式輸送機滑移距離的理論可動作范圍分別為225~800,370~1 050,400~900 mm;夯實機構夯實角度的理論可動作范圍分別為0°~41°,0°~47°,0°~48°;夯實機構伸出后長度的理論可動作范圍分別為2 750~4 700,1 785~3 075,1 860~3 460 mm。
由表5可知,不同支架在相同的工作狀態下可能發生干涉的幾率也不相同,其具體影響與支架自身的結構參數有關。
3.3 充填系統布置及工藝參數
充填系統布置及工藝參數主要包括系統布置方式、夯實次數、卸料點位置、采充質量比等。
(1)系統布置方式。主要指俯采仰充、俯充仰采2種狀態,該因素影響多孔底卸式輸送機的懸掛角度及充填物料的落料位置,采用俯采仰充工藝,夯實機構與多孔底卸式輸送機距離縮短,容易造成機構干涉,反之,采用仰采俯充工藝,干涉越不容易發生。
(2)夯實次數。該因素主要影響支護效果,支護效果影響后頂梁上覆巖層的應力,支護效果過差產生機構干涉的概率越高。
(3)卸料點位置。充填物料自多孔底卸式輸送機卸料口落入采空區,合理的卸料點位置能夠使充填物料落入最佳夯實區域,保證充填效果,卸料點位置偏左,充填物料可能落入夯實機構內側或掩埋夯實頭,產生第1,2類干涉,卸料點位置偏右,夯實機構的最大允許仰角越小,容易發生第3,4類干涉。
(4)采充質量比。該因素影響充填體的充填效果及充填強度,充填效果越好,充填液壓支架所受應力集中越小,后頂梁越不易變形,干涉則越不容易發生。
3.4 其他因素
其他因素主要包括油缸缸徑大小及充填物料特性,油缸缸徑大小影響夯實機構的夯實力及夯實機構的伸縮量,使干涉位態發生變化;充填物料特性包括物理特性和力學特性,其物理特性如自然安息角、粒徑級配、黏結性等將影響落料時形成堆積角度及落料效率;而充填物料的力學特性如抗壓強度、剪切模量等將影響其夯實過程中的夯實難易程度、夯實次數等,從而影響機構干涉發生的幾率。
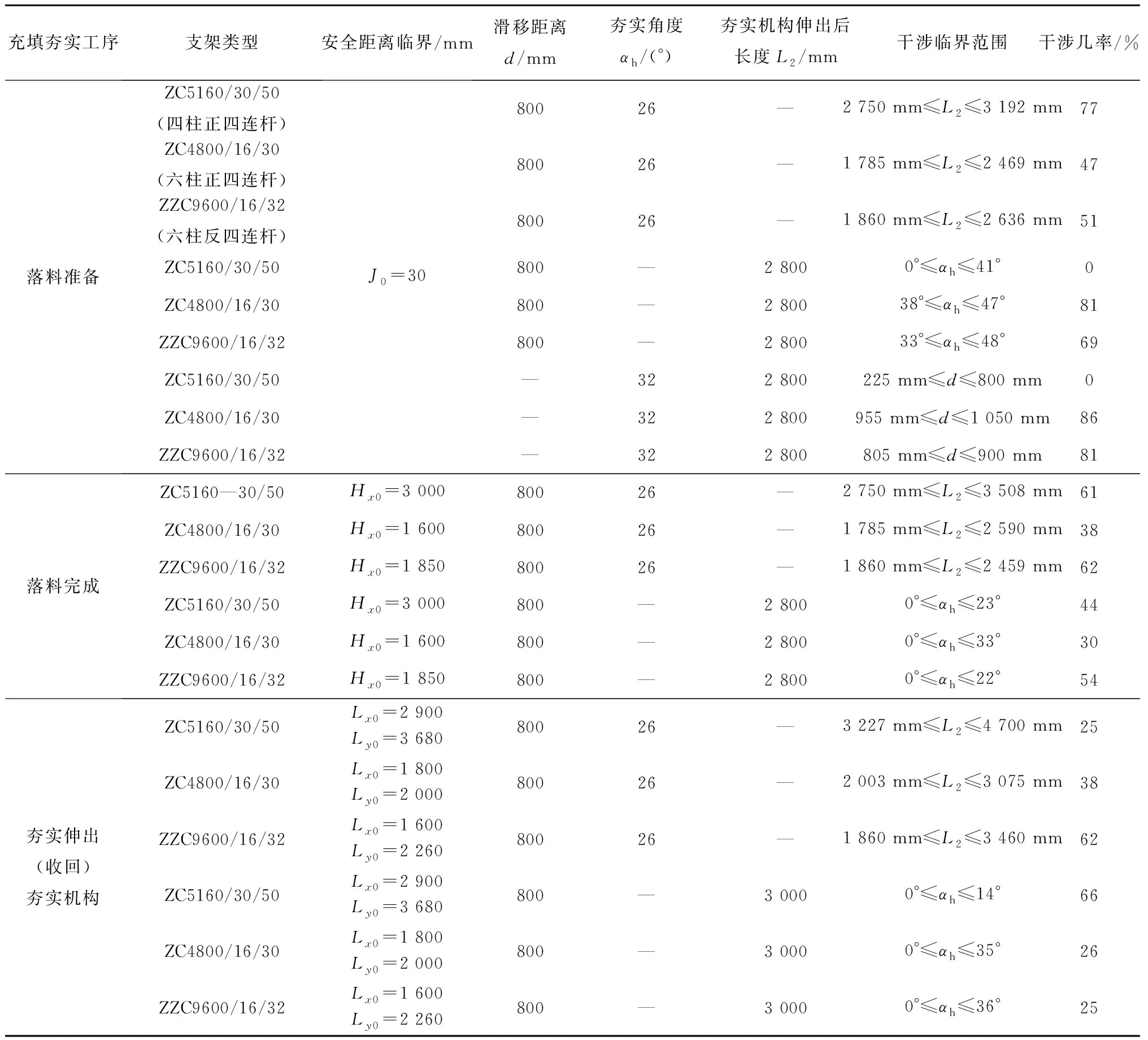
表5 不同支架類型對干涉判別準則及調控路徑的影響Table 5 Influence of different support types on interference criterion and adjustment path
綜合上述分析可知,在4類影響因素中,地質條件和架型結構的改變將大幅影響機構干涉的幾率,是機構干涉的主要影響因素;充填系統布置及工藝參數對機構干涉的影響相對較小,而其他因素主要通過影響支架運行狀態等參數間接影響機構干涉,是機構干涉的次要影響因素。
4 機構干涉調控方法與機制
4.1 基于地質條件的調控
在進行充填作業的過程中,地質條件的變化會影響到支架的正常工作狀態,使其更容易產生位態干涉。因此,針對不同的地質條件變化要采取相應的措施來避免干涉位態的產生,一方面,設備要能適應所處工作環境;另一方面,當地質條件發生較大變化時,如采高降低、煤層傾角變大、頂板發生破碎等,及時收回夯實機構或者縮小夯實機構的夯實角,以防止產生機構干涉,保證地質條件的變化不影響充填作業的順利進行。
4.2 基于充填裝備的調控
充填裝備主要包括固體充填液壓支架及多孔底卸式輸送機,為減少機構干涉的產生,在進行充填裝備的選型設計時,要重點考慮初始卸料中心距、輸送機懸掛高度、后頂梁參數和四連桿類型等架型結構因素對干涉的影響,首先,需要考慮多孔底卸式輸送機與夯實機構在時空上配合,設計合理的卸料中心距;其次,為了滿足頂板下沉及傾斜煤層開采時落料工序的順利進行,同時又避免與夯實機構產生干涉,輸送機的懸掛高度設計要進行合理性與安全性的評估;第3,要盡量控制后頂梁的長度及厚度,在滿足控頂要求的前提下盡量減少干涉位態的產生,最后,在選用不同四連桿機構的充填液壓支架進行作業時,注意在進行升降架過程中可能發生的干涉問題,針對其不停的雙紐線軌跡及時作出合理的調整,避免產生干涉位態。
4.3 基于充填系統布置及工藝參數調控
在進行充填系統布置及工藝參數選擇方面,要進行合理的選擇和設計,充分考慮系統布置方式、夯實次數、卸料點位置、采充質量比等因素,盡可能減小對干涉的影響。對于傾斜工作面,在充填系統布置時,要盡量選擇仰采俯充的充填工藝,減小因支架角度變化而引起的干涉問題,同時,選擇合適的卸料點位置,在保證充填效率的基礎上,盡可能多的增加夯實次數,增強充填體的支護效果,起到較好的頂板控制作用,防止產生干涉。
4.4 機構干涉調控機制
嚴格控制干涉位態的產生以及產生干涉位態后機構的自主識別與智能調控是避免機構間卡頓、保證充填工序正常進行的基礎。根據上文可知,機械自主夯實過程機構干涉主要受地質條件、架型結構、充填系統布置及工藝參數、其他因素等的影響,實現機構干涉的調控主要從2個方面進行,如圖7所示。
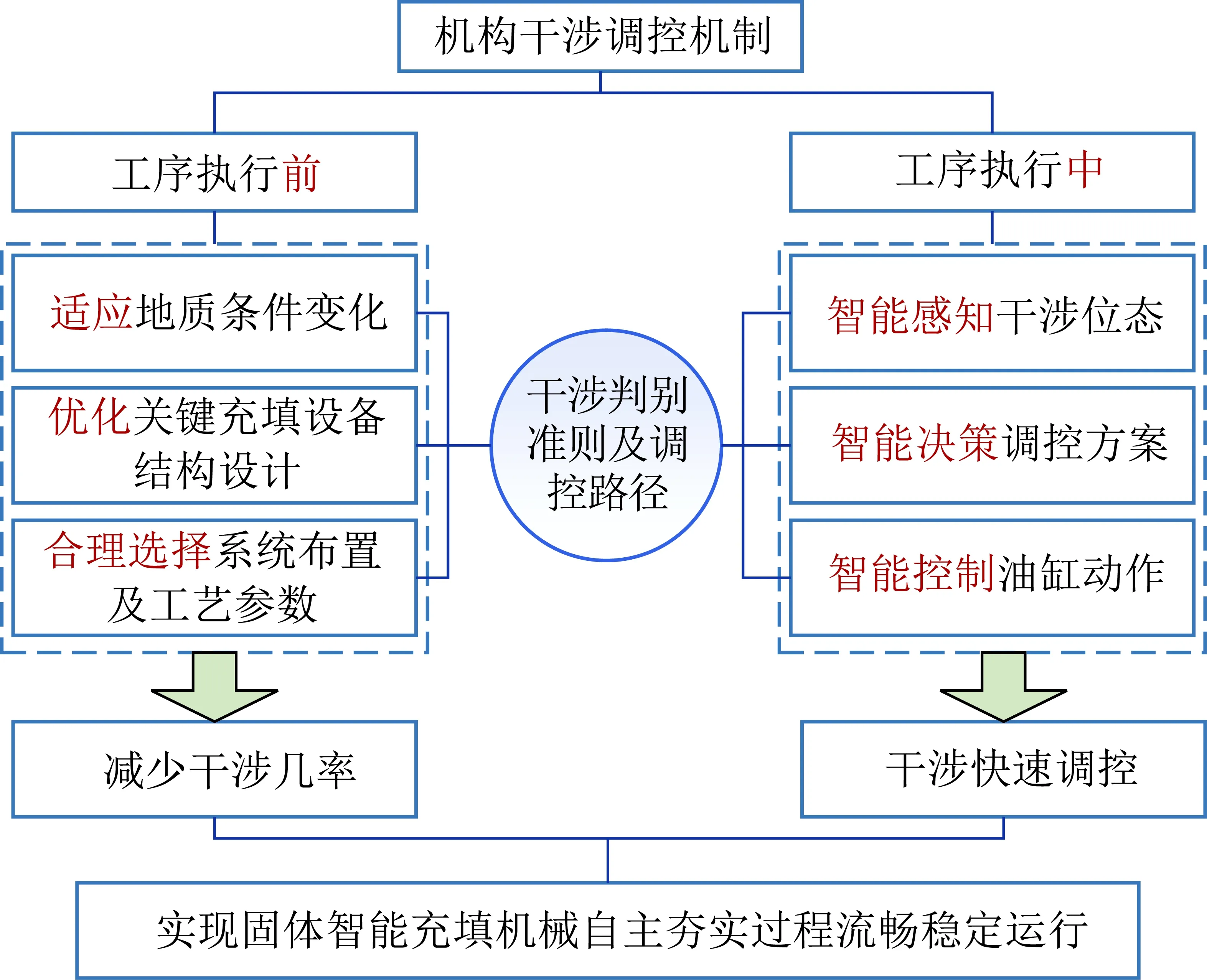
圖7 機構干涉調控機制示意Fig.7 Schematic diagram of institutional intervention and regulation mechanism
一方面是減少干涉位態的產生。在分析了各類因素對干涉位態的影響基礎上,通過適應工作面地質條件、優化關鍵充填裝備設計、合理選擇充填系統布置方式及工藝參數等方法,保證良好的充填條件,達到減少干涉位態產生的目的。
另一方面是在產生干涉位態后機構能夠進行自主識別和智能調控。在充填工序執行過程中,干涉位態一旦產生,充填液壓支架等裝備要能夠及時感知干涉類型,并結合對應的解調路徑,控制相應油缸快速進行解調,避免因干涉造成各充填設備的損壞以及采充工序的執行。
5 機構干涉調控工程實踐
對于整個礦區條件而言,機構干涉的影響因素多種多樣,不同采區、不同煤層的地質條件賦存、充填裝備的選擇及充填系統布置及工藝參數的選擇都不相同;而在同一采區或者同一煤層條件下,其地質條件一般變化較小;當具體到某一固定的工作面,除了通過采取相關措施控制頂板提前下沉及調整充填裝備的相關機構外,大部分影響因素在充填作業前已基本固定。
筆者以某固體智能充填工作面工程實踐為例應用干涉調控方法。該工作面面長約60 m,煤厚平均4.4 m,煤層傾角平均為8°,采用ZC5160/30/50充填液壓支架,仰采俯充回采工藝。
該工作面在充填過程常會發生機構干涉,主要原因:
(1)工作面頂板為2類Ⅱ級頂板,易破碎垮落,造成支架后頂梁下沉;
(2)支架后端夯實機構與多孔底卸式輸送機運動空間較小,易發生碰撞;
(3)卸料中心距設置不合理,容易造成物料落入夯實機構內側等干涉狀態。
以井下典型工況狀態為例,后頂梁提前下沉旋轉角為6°,支架卸料中心距2 300~3 000 mm,輸送機滑移距離400~600 mm,夯實機構夯實角度18°~36°。為降低干涉幾率,設計采用減小頂板提前下沉,調整卸料中心距及輸送機滑移距離等控制措施,減少機構干涉情況的產生,具體參數調整及干涉幾率變化見表6。
由表6可以看出,通過適應地質條件變化,優化采充工藝參數等措施,顯著降低了自主夯實過程的機構干涉幾率,干涉幾率最高由84%降低至21%,提高了工作面的生產效率。
現場實踐也表明:未采用機構干涉調控方法之前,充填液壓支架在執行采充平行作業的過程中頻頻發生卡頓,據現場數據統計,自動化開機率僅30%左右,采用該方法后開機率增長為72%,固體智能充填液壓支架自主夯實過程卡頓明顯減低,為完全實現智能充填提供了基礎。
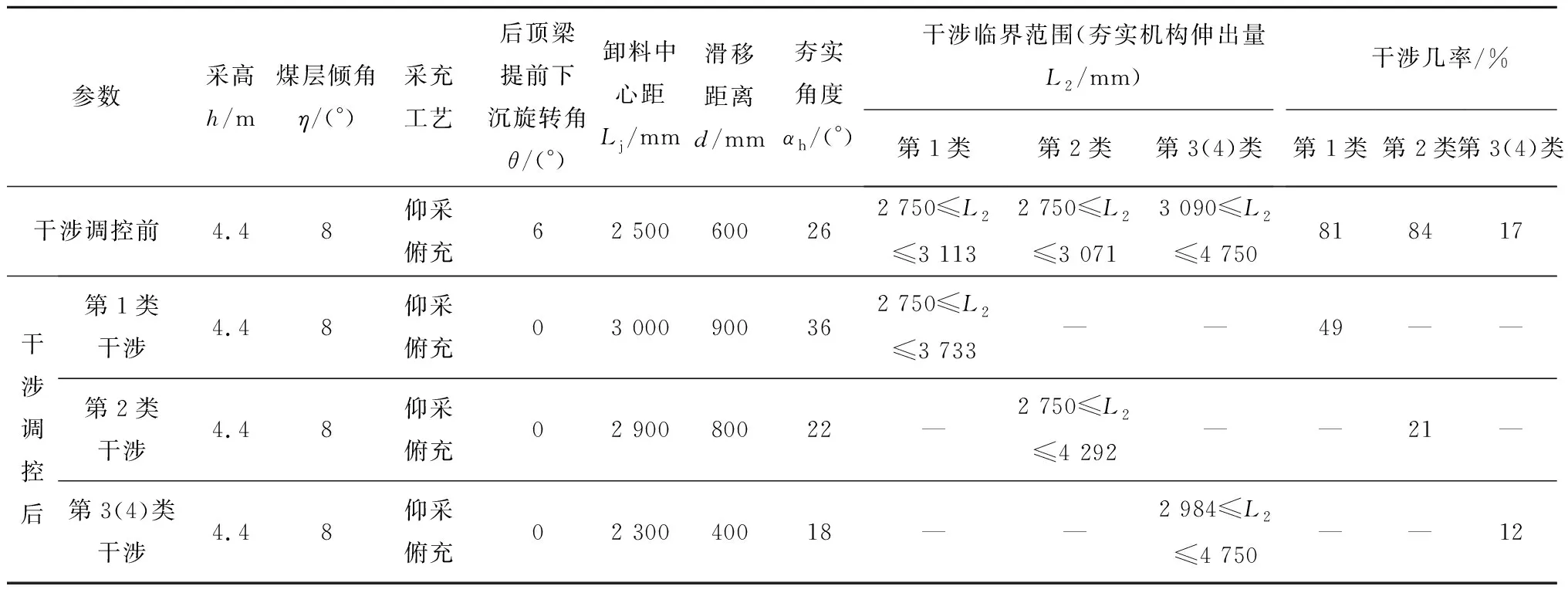
表6 調控前后干涉幾率對照Table 6 Comparison of interference probability before and after regulation
6 結 論
(1)從影響充填效率、裝備工作狀態和工藝自動執行3方面闡述了解決機構干涉對于實現固體智能充填的重要意義。
(2)提出了影響夯實工藝的相關因素,通過建立支架的三維實體模型及骨架模型,并對其在不同工作狀態、不同干涉影響因素下的動作進行仿真模擬,采用干涉臨界范圍、干涉幾率指標量化分析了煤層厚度及傾角等地質條件、架型結構、充填系統布置及工藝參數等對干涉狀態的影響規律。
(3)分別基于地質條件、充填裝備、充填系統布置及工藝參數等6個方面提出了機構干涉調控方法。
(4)工程實踐證明:機構干涉調控方法的應用可顯著減少機構干涉發生幾率,固體智能充填液壓支架自主夯實過程卡頓明顯減低,有力促進了固體智能充填技術的完善。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
當代陜西(2021年2期)2021-03-29 07:41:24
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
