基于5G通信的協(xié)同自適應(yīng)巡航系統(tǒng)
2022-04-02 06:25:42雷嘉豪
汽車實(shí)用技術(shù) 2022年6期
雷嘉豪,李 江,劉 波
(陜西工業(yè)職業(yè)技術(shù)學(xué)院 汽車工程學(xué)院,陜西 咸陽 712000)
隨著機(jī)動(dòng)車輛數(shù)量的不斷增加,車輛增長的速度已經(jīng)逐漸超過道路和其它交通設(shè)施的承載能力,制約了道路交通的高速發(fā)展。當(dāng)車輛處于相同速度時(shí),減小其行駛間距可以有效增加道路容量,緩解交通壓力。但與此同時(shí)也對(duì)車輛自適應(yīng)巡航系統(tǒng)的性能及安全保障提出了更嚴(yán)苛的要求。如何同時(shí)兼顧行駛安全和通行效率就成了當(dāng)前亟需解決的問題。
近年來隨著第五代移動(dòng)通信技術(shù)(5th Generation Mobile Communication Technology, 5G)的發(fā)展及通信節(jié)點(diǎn)的普及,將5G通信技術(shù)具備的優(yōu)勢應(yīng)用到車載自組網(wǎng)絡(luò)(Vehicular Ad-hoc NETwork,VANET)中,就能夠在一定程度上實(shí)現(xiàn)同時(shí)兼顧車輛安全性和道路通行效率的車輛巡航控制系統(tǒng)。
目前已經(jīng)投入實(shí)際應(yīng)用的自適應(yīng)巡航系統(tǒng)可以通過測距傳感器來檢測距引導(dǎo)車輛的距離,進(jìn)而通過負(fù)反饋控制跟隨行駛。但在自適應(yīng)巡航系統(tǒng)中,車輛與車輛之間沒有信息交互,每輛車都是一個(gè)信息孤島,所以始終只能以較大間距進(jìn)行跟隨行駛。基于此問題,結(jié)合5G通信技術(shù)的相關(guān)性能指標(biāo),通過將5G通信技術(shù)與VANET相融合,探究車輛在5G與VANET下的協(xié)同自適應(yīng)巡航控制系統(tǒng)。
1 5G通信與V2X體系結(jié)構(gòu)分析
1.1 V2X通信
在智能交通系統(tǒng)范疇內(nèi),車輛主要通過兩類途徑來獲取外界信息,即車輛自身傳感器(雷達(dá)或攝像頭)和無線通信系統(tǒng),而車對(duì)外界信息交換(Vehicle-to-everying, V2X)技術(shù)就是屬于后者的一種。
V2X是智能網(wǎng)聯(lián)范疇內(nèi)車輛對(duì)外界交通參與者及設(shè)施的信息交換。它整合了車對(duì)車通信技術(shù)、車對(duì)交通設(shè)施通信技術(shù)、車對(duì)網(wǎng)絡(luò)通信技術(shù)及遠(yuǎn)程感應(yīng)技術(shù)等,是新一代智能交通運(yùn)輸系統(tǒng)的關(guān)鍵技術(shù)。而其中 V2V通信基于車載感知/通信設(shè)備,可以獲得更廣泛和可靠的周邊車輛狀態(tài)信息。在一定范圍內(nèi),通過特定的通信網(wǎng)絡(luò)將每個(gè)交通參與者的信息進(jìn)行共享,如此一來就能夠使車輛采集到雷達(dá)或傳感器探測范圍之外的關(guān)鍵交通信息,這些信息包括位置、行駛方向、速度以及異常的加速或制動(dòng)等,如圖1所示。

圖1 V2V信息傳遞示意圖
通過V2V通信的提前預(yù)知,在行駛過程中車輛就能夠在最短的時(shí)間范圍內(nèi)對(duì)周圍的潛在風(fēng)險(xiǎn)進(jìn)行做出提前判斷,從而提高行駛安全性如巡航控制系統(tǒng)收到超視距的預(yù)警信息后及時(shí)采取加速、轉(zhuǎn)向或制動(dòng)等)。
與此同時(shí),在提前得到附近車輛的運(yùn)動(dòng)狀態(tài)和其他交通信息后,有助于提升道路通行效率和行駛過程中的舒適性。
1.2 5G通信技術(shù)
第五代移動(dòng)通信技術(shù)是具有高速率、低時(shí)延和大接入點(diǎn)數(shù)量的新一代寬帶移動(dòng)通信技術(shù)。其中的可靠低時(shí)延通信可以有效地面向工業(yè)控制、智能網(wǎng)聯(lián)及自動(dòng)駕駛等對(duì)時(shí)延和可靠性具有極高要求的應(yīng)用需求,傳輸速率可達(dá)1 Gbps,時(shí)延低至1 ms;5G通信所具備的低延時(shí)高帶寬及優(yōu)秀的用戶接入量支持特性可以有效地用于協(xié)同自適應(yīng)巡航控制系統(tǒng)中的V2V通信組網(wǎng),使系統(tǒng)達(dá)到更好的控制效果。
2 巡航系統(tǒng)跟隨控制策略
協(xié)同自適應(yīng)巡航系統(tǒng)為具有前導(dǎo)車輛的前向跟隨拓?fù)浣Y(jié)構(gòu)。被實(shí)施控制的車輛可以得到前導(dǎo)車輛(通過雷達(dá)/傳感器)及VANET(5G通信)的信息。此拓?fù)浣Y(jié)構(gòu)下的控制器結(jié)構(gòu)框圖如圖2所示。通過 5G通信獲取的前饋信號(hào)和通過雷達(dá)/傳感器獲取的反饋輸入同時(shí)做為車輛的動(dòng)力學(xué)的信號(hào)輸入。
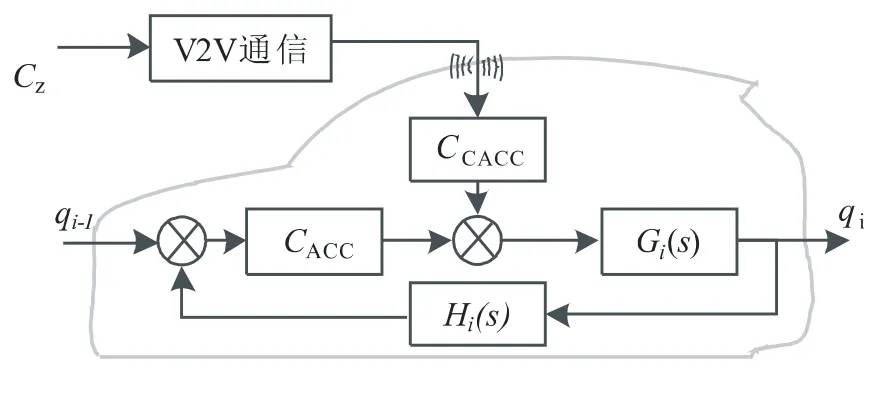
圖2 車輛前向跟隨拓?fù)淇刂平Y(jié)構(gòu)
車輛之間的通信效率由網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)來決定,車輛在處于5G通信下的協(xié)同自適應(yīng)巡航時(shí),車輛依托VANET來發(fā)送運(yùn)行數(shù)據(jù)及感知信息,周邊所有處于巡航行駛中的車輛都能通過通信接收狀態(tài)信息。基于5G通信的隊(duì)列跟隨行駛模型如圖3所示。

圖3 協(xié)同巡航隊(duì)列示意圖
處于巡航控制下的車輛要保持盡可能小的車輛間距d,同時(shí)又不能夠影響車輛行駛的安全性。除此之外,車流整體的穩(wěn)定性也需要得到保證,當(dāng)前車的運(yùn)行狀況發(fā)生突然改變時(shí),引起的擾動(dòng)必須要在車流向后逐級(jí)傳遞時(shí)持續(xù)衰減。
由此可得出基于 5G通信的車輛跟隨模型如下:

是間距時(shí)間常數(shù),其表示第輛車到達(dá)與-1輛車相同位置的時(shí)間。可以看到上圖中,狀態(tài)矩陣為下三角型,根據(jù) Routh判據(jù)可知,巡航系統(tǒng)產(chǎn)生的動(dòng)態(tài)誤差可在間距時(shí)間常數(shù)大于零時(shí)的任何情況下達(dá)到穩(wěn)定。
3 仿真實(shí)驗(yàn)
為了嚴(yán)格控制系統(tǒng)變量,仿真系統(tǒng)搭建時(shí),不考慮 5G通信中可能會(huì)出現(xiàn)的數(shù)據(jù)丟包和信號(hào)干擾。同時(shí),考慮到實(shí)際交通流中用戶接入量和數(shù)據(jù)交換吞吐量與 5G通信標(biāo)準(zhǔn)設(shè)定上限相比有很大冗余,故通信延遲為設(shè)定為1 ms~5 ms,通信帶寬及用戶接入量不設(shè)限。對(duì)比跟隨車輛在自適應(yīng)巡航(Adaptive Cruise Control, ACC)與5G通信的協(xié)同自適應(yīng)巡航系統(tǒng)下的縱向跟隨行駛過程。
圖4和圖5分別顯示了在當(dāng)前ACC下的結(jié)果和在 5G通信協(xié)同自適應(yīng)巡航系統(tǒng)下的仿真測試結(jié)果,和在前導(dǎo)車輛速度變化相同時(shí)系統(tǒng)測試軌跡下四輛車的速度響應(yīng)。ACC(圖4)中車流尾端車輛的最大速度為55.9 km/h,圖5中則控制在了46.9 km/h,在車流中,處于尾端的車輛的最大速度波動(dòng)能夠體現(xiàn)出控制系統(tǒng)的跟隨性能其絕對(duì)值越大,巡航系統(tǒng)運(yùn)行時(shí)的間距就越無法保持穩(wěn)定。

圖4 速度響應(yīng):車輛1—6
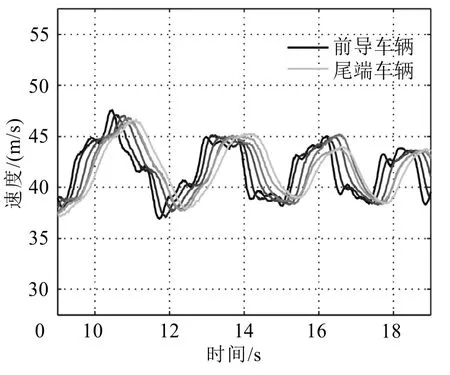
圖5 速度響應(yīng):車輛1—6(5G)
處于巡航系統(tǒng)控制下的跟隨間距變化過程如表1所示。
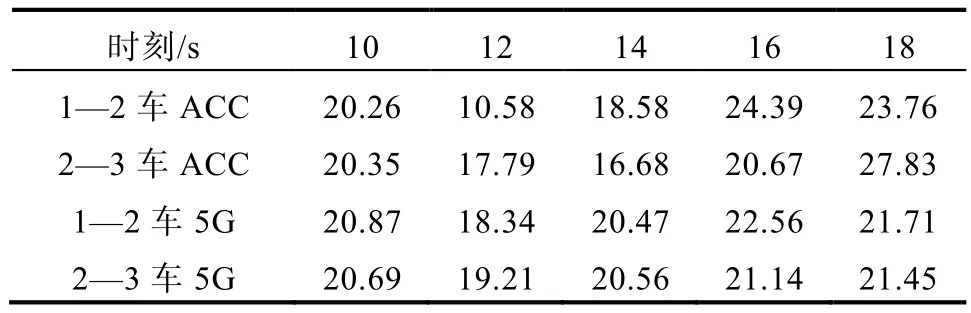
表1 系統(tǒng)跟隨間距變化
巡航過程中車輛的最大間距差如表 2所示。可以看出,在5G通信的協(xié)同自適應(yīng)巡航系統(tǒng)下,車輛間距差絕對(duì)值顯著減小。

表2 跟馳過程最大間距差絕對(duì)值
數(shù)值仿真結(jié)果顯示,5G通信協(xié)同自適應(yīng)巡航系統(tǒng)在車輛巡航跟馳過程中的最大間距和最大加速度絕對(duì)值均較小。實(shí)驗(yàn)結(jié)果顯示,該方法在一定程度上實(shí)現(xiàn)了穩(wěn)定的巡航跟隨間距,隊(duì)列穩(wěn)定性較好,驗(yàn)證了此方法的可行性。
4 總結(jié)與展望
當(dāng)前車輛自適應(yīng)巡航系統(tǒng)無法在高速巡航中同時(shí)兼顧通行容量與安全性,而將基于5G通信的VANET融入到車輛自適應(yīng)巡航系統(tǒng)之中形成基于5G通信的協(xié)同自適應(yīng)巡航系統(tǒng)可以有效地解決高速低間距問題。通過仿真實(shí)驗(yàn)分析,結(jié)果表明5G通信所具備的低延時(shí)高帶寬及優(yōu)秀的用戶接入量支持特性可以有效地對(duì)接車輛自適應(yīng)巡航控制系統(tǒng)中的實(shí)際需求,從而能夠在降低跟車間距的同時(shí)保證道路通行效率。
在未來智能交通的發(fā)展中,隨著技術(shù)的不斷革新,芯片、傳感器及通信設(shè)備的性能指標(biāo)還會(huì)進(jìn)一步得到提升。隨著 5G時(shí)代的到來,低延時(shí)高效能的通信已經(jīng)為智能網(wǎng)聯(lián)汽車的發(fā)展奠定了堅(jiān)實(shí)的基礎(chǔ)條件,車輛間真正的信息共享即將成為現(xiàn)實(shí)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
