基于毫米波雷達的汽車開門防撞系統設計
2022-04-02 06:25:50費文玉左付山趙風財李明桃
汽車實用技術 2022年6期
關鍵詞:系統
費文玉,左付山,趙風財,張 敏,張 鵬,李明桃
(南京林業大學 汽車與交通工程學院,江蘇 南京 210037)
當車輛靠邊停車后,車內乘客由于視野盲區等因素無法準確判斷車輛后方的危險情況,盲目打開車門后極易與后方駛來的危險物體發生碰撞。有關文獻指出,總的交通事故傷殘人數中,11.6%是該事故造成的。更嚴重的是,當后續駛來的機動車無法及時制動時,非常容易碾壓受害者并對其造成二次傷害,上述情況的死亡人數在總的死亡人數中占比大約為5.4%。
目前,國內一部分技術思路只設計了報警裝置,而沒有過多地設計緊急制動裝置。考慮實際情況,該類事故一般發生在時間較短的情況下,事故雙方來不及做出躲避反應。所以,僅有報警裝置無法盡可能地保證安全,還需要設計緊急制動裝置來強制避免事故的發生。另一部分技術思路設計了鎖止門鎖的緊急制動方式,利用傳感器探測到危險時,車內乘客便無法將車門打開。實際生活中,高峰時段的路況十分復雜多變,來往的車流密集,此時,上述思路有可能造成車門始終無法打開的尷尬情形。即使在加裝了聲光報警裝置后,由于吵鬧的環境、不良的天氣,快速通過的電動車、行人等,也很難在短時間內理解清楚車內乘客的下車意圖。車內乘客如果盲目按下緊急按鈕強行將車門打開或從車門虛掩的狀態下打開車門,上述思路便失去了保護功能,該事故依舊會發生。國外文獻大多分析了該事故原因和建立了事故數學模型,一些車企例如奧迪公司設計了防撞系統,但成本相對較高。因此,開發一種適用多場景的簡易汽車開門防撞系統十分重要。
1 汽車開門防撞系統設計總思路
本文總結了已有思路的弊端,創新性地提出在車內乘客打開車門過程中實時探測危險并制動車門的思路。
汽車開門防撞系統的結構圖和工作流程圖如圖1和圖2所示,其工作過程簡述如下:當車內乘客開啟車門時,安裝在車門側面鎖扣附近的毫米波雷達立即向車門后方探測。如果在車門打開一定的角度內沒有發現危險物體,則本系統不影響車門的正常打開;如果雷達探測到危險物體,則制動裝置立即制動車門,使車門不能繼續開啟。同時,聲光報警裝置提醒車內與車外人員。本系統設計與已有設計的核心不同在于,本系統采取過程防護的思想,使得車門可以打開,并實現開門中的連續保護。
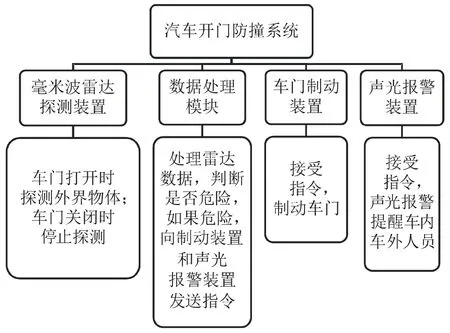
圖1 汽車開門防撞系統結構圖
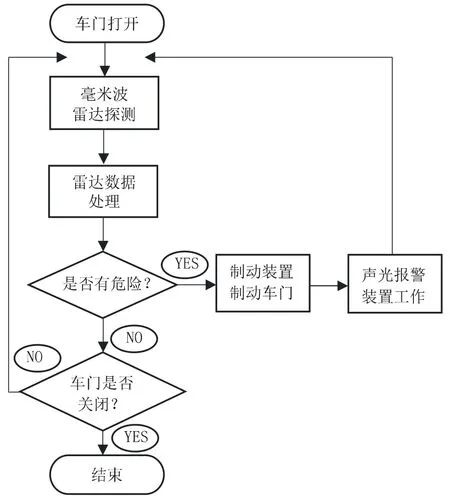
圖2 汽車開門防撞系統工作流程圖
本系統核心在于毫米波雷達探測裝置的探測功能、數據處理模塊的數據處理功能和車門制動裝置的制動功能,下面分別介紹其工作原理。
2 汽車開門防撞系統探測功能設計
根據參考文獻[1],用于探測的傳感器有紅外線傳感器、毫米波雷達、激光雷達、視覺傳感器、超聲波傳感器等。紅外線傳感器受溫度影響較大,激光雷達和視覺傳感器受干濕度影響較大,且成本較高,超聲波傳感器探測距離較近。相較之下,毫米波雷達的各項性能良好且成本適中,故本文選擇此類傳感器來實現汽車開門防撞系統的探測功能。
毫米波雷達可以實現測距、測速、測角等基本功能。例如,雷達甲與目標乙之間的距離可以利用測量得到的雷達電磁波往返所需的時間得到,如式(1)所示。

其中,為光速。
測速利用的原理主要是多普勒效應,該原理是指,當發射裝置和接收裝置之間有相對的位移時,接收到的回波信號的頻率將改變。多普勒頻率如式(2)所示,利用該式可求出目標徑向速度。

測角的原理本文介紹相位法測角,假設在方位有一個物體,物體的回波信號與發射信號幾乎平行。兩接收天線收到的回波信號由于存在波程差Δ而產生了一個相位差為,由此可得式(3)。

其中,為雷達的波長,為兩天線基線間長度。利用相位計的比相,可以測得其相位差,就可以確定物體方向。
本文中的毫米波雷達安裝在車門側面鎖扣附近,如圖 3所示。這樣設計的好處是:車門剛剛打開微小的角度,雷達開始實時探測外界物體,數據處理模塊實時判斷危險情況,制動裝置可以隨時制動車門,避免嚴重事故的發生。

圖3 毫米波雷達安裝位置圖
3 汽車開門防撞系統數據處理模型建立與實現
波雷達探測到外界物體的回波信號后,經過一系列信號處理算法,得到距離、速度等信息。這些信號處理算法的作用可以概括為抑制背景和干擾物的雜波,增強感興趣目標的信號強度,從而提高探測精度。本文中,感興趣目標指的是車道上運動中的可能造成危險的物體。常見的信號處理算法流程為:MTI(動目標顯示,Moving Target Indication)—MTD(動目標檢測,Moving Target Detection)—恒虛警檢測—聚類。MTI和MTD算法的主要作用是抑制外界靜止物體和干擾物的雜波,恒虛警檢測的目的是減小漏警和虛警的概率,聚類算法可以使得同屬于一個目標的數據點集中起來,從而利用雷達點云數據實現對多目標的探測和追蹤,如圖4所示。
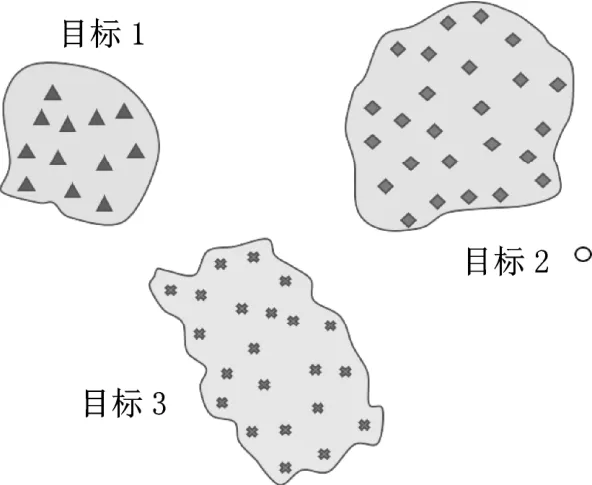
圖4 信號處理實現多目標探測演示圖
當雷達采集到多個外界物體的距離、速度等信息后,汽車開門防撞系統應及時處理采集到的數據,判斷外界物體是否會對車門造成威脅,以此作為采取制動措施的依據。由于道路上物體的運動涉及到動力學、天氣狀況等多重因素的影響,其機理十分復雜,所以本文采用極限學習機模型來判斷外界物體危險等級。

根據式(5)計算,式中 是矩陣的Moore-Penrose增廣逆,是訓練樣本標簽t排列而成的矩陣。

在上述計算過程完成后,根據式(6)可以計算測試樣本的標簽。

本文選取距離、角度、速度、速度變化率、角度變化率這五個特征值作為輸入值,選取危險等級作為輸出值,1為安全 2為危險。采用MATLAB軟件,導入模擬數據進行訓練。預測結果如圖 5所示,在少量預測樣本的情況下,測試結果可以達到100%的準確率。
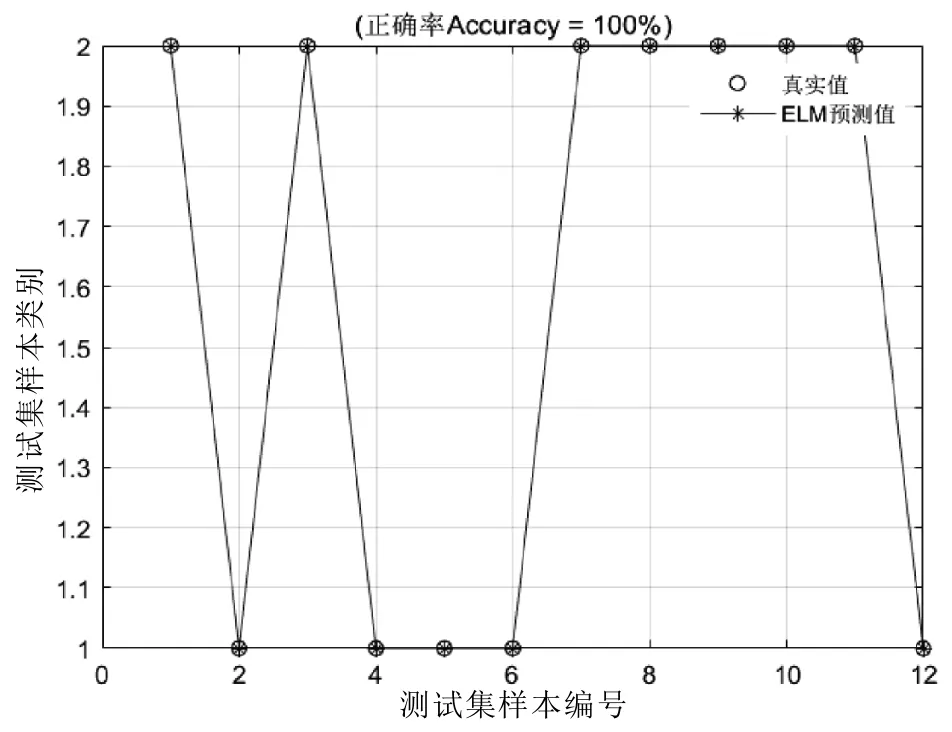
圖5 模擬預測樣本測試結果圖
4 汽車開門防撞系統制動功能設計
為了實現汽車開門防撞系統的制動功能,本文設計了限位器制動裝置,如圖6—圖8所示。
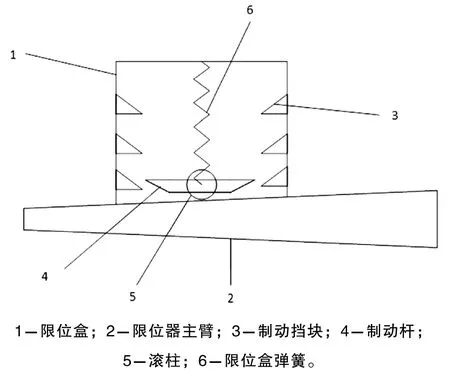
圖6 限位器制動裝置圖
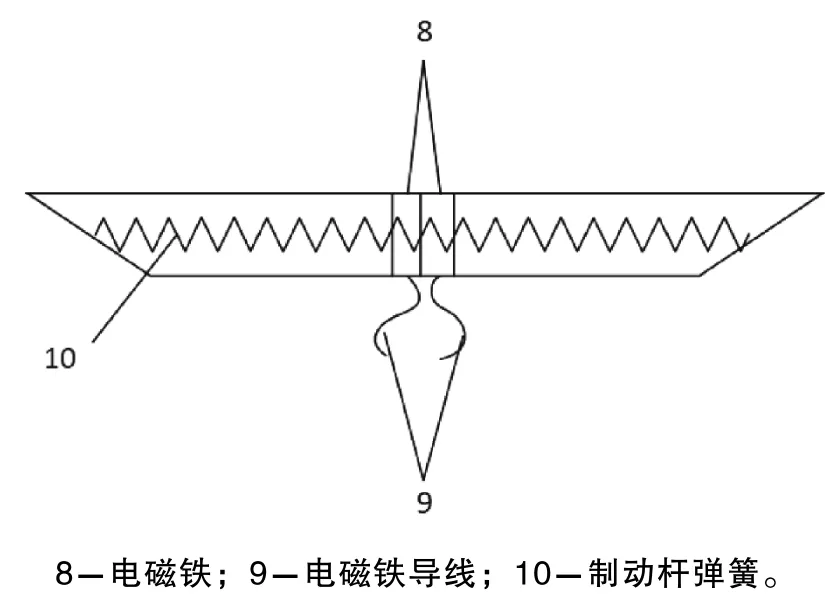
圖7 制動桿壓縮狀態圖
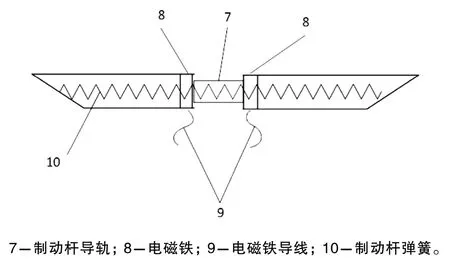
圖8 制動桿伸長狀態圖
根據文獻[12-14],目前國家標準和行業標準尚未對限位器作出充分描述。從部分車型的限位器參數可以看出,限位器一級限位凹槽處近似對應車門開啟一半位置。并且根據限位器主臂的設計參數,一級限位凹槽之前滾柱在限位器主臂上的移動可以看作連續上坡。
限位盒安裝在限位器主臂上,當車門逐漸開啟時,限位盒沿限位器主臂軸向相對移動。限位器主臂安裝在車門與車體之間,其形狀參數決定了限位級數與位置。制動擋塊為楔形擋塊,安裝在限位盒側壁上。制動桿兩端制成與制動擋塊配合的楔形,安裝在滾柱上,可以隨著滾柱移動。當制動桿處于收縮狀態時,其長度不影響滾柱在限位盒內的移動;當制動桿處于伸長狀態時,由于其兩端的楔形形狀使制動桿無法向上移動,但可以向下移動。滾柱與限位器主臂直接接觸,沿限位器主臂軸線滾動并在限位盒內沿垂直限位器主臂軸線方向移動。限位盒彈簧連接滾柱與限位盒頂部。制動桿導軌位于制動桿內部,使得制動桿分離時沿軸向移動。電磁鐵位于制動桿中部,左右分離部分各一個,通電時具有磁性,斷電時不具有磁性。電磁鐵導線連接電磁鐵,用于給電磁鐵供電。制動桿彈簧位于制動桿內部,連接制動桿兩端,在制動桿收縮狀態下保持壓縮。
車門逐漸開啟時,限位盒沿限位器主臂軸向相對移動,滾柱與制動桿在限位盒內部向上移動。電磁鐵導線通電使電磁鐵具有磁性,從而使制動桿保持收縮狀態,不影響滾柱的移動。當電磁鐵導線經歷斷電又通電的過程后,電磁鐵由于導線斷電而失去磁性,使制動桿在制動桿彈簧的彈性力作用下沿制動桿導軌伸長。制動桿卡在制動擋塊下,使滾輪無法繼續向上移動,從而使車門無法繼續開啟。并且,此時由于制動桿處于伸長狀態使電磁鐵無法吸合。此時關閉車門,滾柱連同制動桿向下移動,由于制動桿兩端與制動擋塊的楔形配合,使制動桿壓縮,其長度使電磁鐵可以吸合,制動桿恢復收縮狀態,不影響滾柱在限位盒內的移動。
通過上述工作流程,限位器制動裝置可以在毫米波雷達探測到危險物體時及時鎖止車門,避免嚴重事故的發生。限位器制動裝置的安裝位置如圖 9所示,在限位器處設計制動裝置而不是鎖止門鎖的好處是讓車門打開微小角度,使得車外人員可以理解車內乘客的下車意圖。采用了過程防護的思路,在開門過程中具有連續保護功能。當車門從虛掩狀態下打開時,本文設計的制動裝置依舊可以起到保護作用,而已有思路的緊急制動功能在車門打開后無法起作用。

圖9 限位器制動裝置安裝位置圖
5 實物模型驗證
硬件部分,本文購買的雷達型號為納雷科技SP25毫米波雷達,該雷達實物連接圖如圖 10所示。雷達由5 V電源驅動,通過雷達信號轉USB連接線與計算機相連。
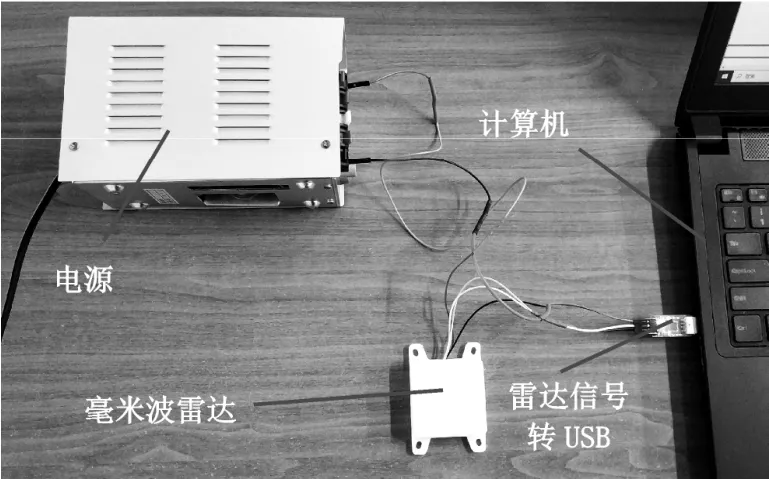
圖10 雷達實物連接圖
軟件部分,通過MATLAB R2018b軟件實現極限學習機算法,再用 LabVIEW 2018軟件搭建汽車開門防撞系統,實現雷達串口通信、雷達數據解析、調用MATLAB極限學習機算法、輸出危險判斷結果等功能,汽車開門防撞系統主界面和程序框圖分別如圖11和圖12所示。
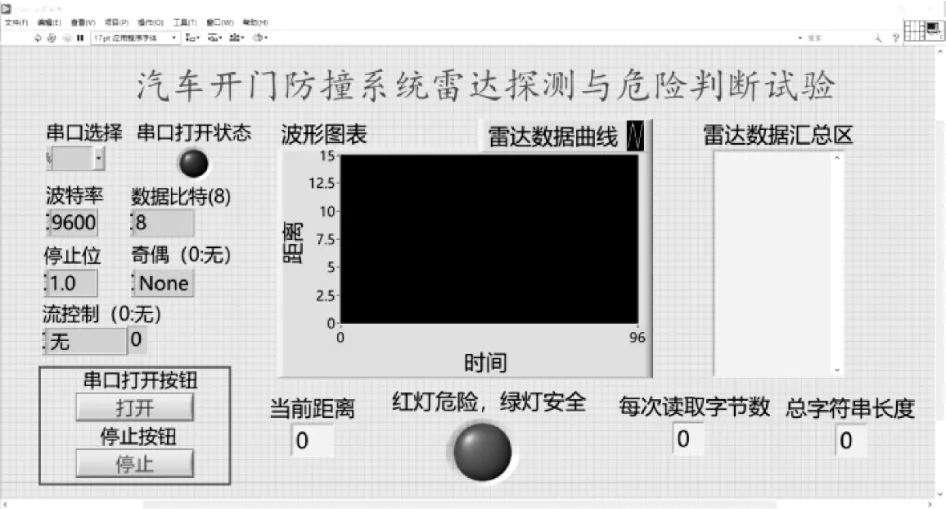
圖11 汽車開門防撞系統主界面圖
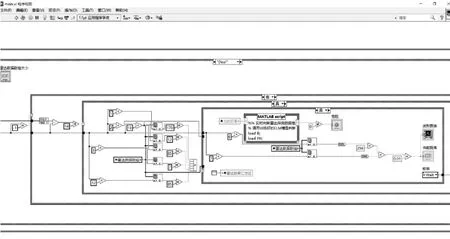
圖12 汽車開門防撞系統程序框圖
在采集訓練算法的標準數據時,理想情況下,可以用真實試驗或仿真試驗的結果來判斷數據是否危險。即如果發生碰撞,就是危險數據,反之則是安全數據。考慮到試驗的危險性,在主要采集速度和距離的情況下,可以選用最小安全距離模型來進行危險判斷。當前速度對應的安全距離如果小于當前實際距離,就是安全數據,反之則是危險數據,具體公式如式(7)所示。

式中,為最小安全車距,單位為 m;為自車速度,單位為m/s;為前車速度,單位為m/s;為駕駛員反應時間,通常取0.4 s;為制動器延遲時間,通常取 0.6 s;為增加到最大減速度所需時間,通常取0.1 s~0.2 s;為車輛最大減速度,本文取7.5 m/s。
根據式(7)判斷模擬數據是否危險,并打上標簽,作為極限學習機算法的初始數據集。試驗開始時,電動車離雷達距離較遠,為7.4 m,如圖13所示。此時系統判斷為安全,系統界面如圖14所示。隨著電動車逐漸靠近,系統的探測和危險判斷準確且靈敏。當電動車距離雷達較近時,此時距離為2.36 m,如圖15所示。這時系統判斷為危險,系統界面如圖16所示。

圖13 電動車距離較遠時實拍圖
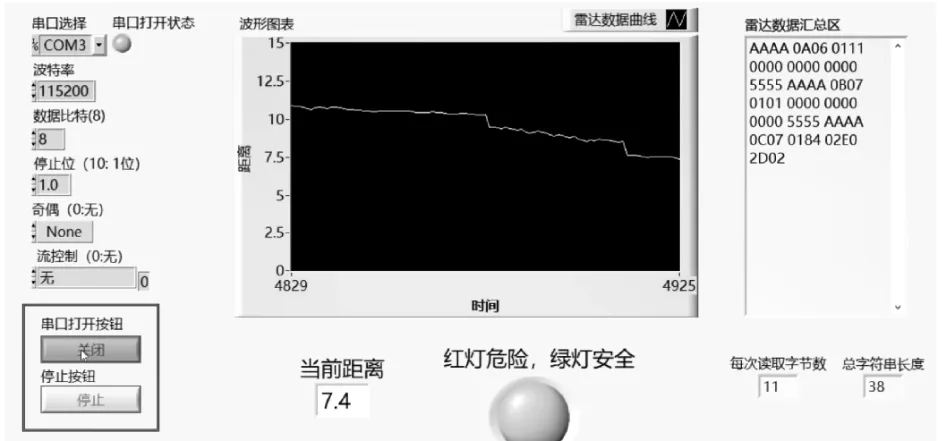
圖14 電動車距離較遠時系統界面圖

圖15 電動車距離較近時實拍圖
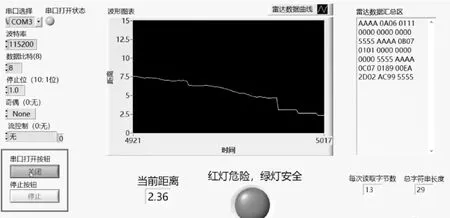
圖16 電動車距離較近時系統界面圖
本試驗證明實物模型與算法的銜接可靠,汽車開門防撞系統可以準確且靈敏地實現雷達探測、數據處理、危險判斷的各個流程,從而正常工作。由于試驗條件限制,本文采用的SP25雷達只能跟蹤一個目標,只能采集距離、速度數據。但是,從測試結果可以看出,在本試驗條件下該雷達較完美地實現了目標。
6 結論
本文研究的創新之處在于采取過程防護的思想,車門開啟全過程都具有保護功能。使得車門可以打開微小角度,便于車外人員理解車內乘客的下車意圖。本文采用極限學習機模型處理數據,避開復雜的動力學原理,判斷外界物體造成危險的等級。本文的研究在交通安全領域具有一定意義,可應用在汽車安全防護系統和智能駕駛系統中,對降低“開門殺”事故發生概率、保障人民的生命財產安全具有一定作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
