基于載波相位測量的相控陣波束時延標定方法
2022-04-04 12:55:30翟江鵬尹繼凱楊思佳
計算機與網絡 2022年4期
翟江鵬 尹繼凱 楊思佳
摘要:介紹了采用載波相位測量方法進行相控陣波束時延標定的工作原理及測試方法,構建了外場測試環境,開展了波束時延測量。測量結果,表明載波相位測量方法的測量精度比偽距測量方法高出一個量級。通過載波相位測量數據,對影響測試結果的空間鏈路傳輸距離標定誤差、轉臺臂長測量誤差及信標天線指向誤差進行了分析。
關鍵詞:載波相位測量;相控陣;波束時延;時延標定
中圖分類號:TN98文獻標志碼:A文章編號:1008-1739(2022)04-54-4

0引言
衛星導航系統能夠全天候為用戶提供高精度導航、定位與授時服務,它的一個重要特征是高精度測量,通常測量精度為納秒甚至亞納秒級。波束時延在衛星導航偽距測量應用中反應了天線的時延特性,通常作為收發鏈路時延組成部分包含在偽距測量結果中。為了獲取衛星同地面天線間距離的精確測量結果,需要對波束時延進行精確標定[1-2]。
對于反射面天線來說,其波束時延可分為饋線時延、饋源網絡時延以及饋源網絡至天線相位中心距離的電波傳輸時延三部分,分別測量出三部分時延即可獲得反射面天線波束零值[3-4]。相控陣天線通過控制各通道信號幅度和相位來實現波束電掃捷變,不同指向波束在增益、主副比和波束寬度等波束性能上存在差異,導致波束空間輻射特性不同,并直接影響波束時延,因此在衛星導航精密測量應用中,需要對波束時延進行標定[5]。
載波相位測量通過測定衛星導航信號中載波相位從衛星發射至接收機空間傳播路程上相位變化,來確定衛星同接收機間距離[6-7]。導航信號載波頻率分布在1 100~1 600 MHz帶寬內多個頻點,對應波長約為20 cm左右,因此通過載波相位測量可以達到很高精度。
1測試原理
相控陣天線通過無線電測距方法來獲取波束時延,待測相控陣天線同遠場條件下信標天線之間建立無線測量鏈路,由相控陣天線發出測量信號,通過測量接收機接收解析獲得測距值,扣除收發設備時延、空間無線鏈路傳播時延即可獲得波束時延。由于相控陣天線不同指向波束輻射特性存在差異,因此需要分別對其作用空域內全部指向波束進行測量。
通常可采用偽距測量方式完成波束零值標定,目前偽距測量采用窄相關間距技術,測距精度可達到碼元寬度1‰左右,以10.23 Mcps碼速率為例,測距精度約為0.1 ns(3 cm),采用載波相位測量方法,測距精度可達到0.01個載波周期(約為0.2 cm),比偽碼測距精度約高一個數量級[8]。
本文采用載波相位測量方法對相控陣天線波束時延進行測量標定,并對該方法同偽距測量方法進行了分析比較,同時對影響測量精度的誤差因素進行了詳細分析。
2測試過程
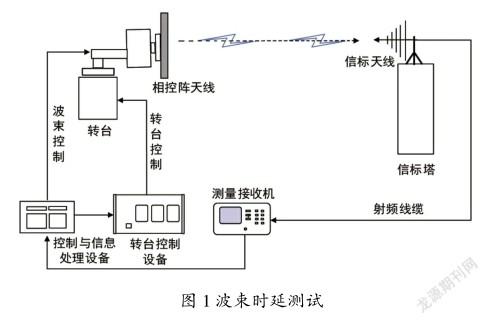
波束時延測試如圖1所示,主要由待測相控陣天線、測試轉臺、控制與信息處理設備、信標天線和測量接收機等儀器設備組成。被測天線同信標天線之間距離滿足遠場測試條件﹥22/,(為天線口徑,為工作波長)。控制相控陣天線生成搭載擴頻測量信號的發射波束,調整轉臺姿態使發射波束對準信標天線,信標天線將接收到的信號通過射頻線纜傳輸至測量接收機進行測量解析,輸出偽距及載波相位測量結果。按照上述方法,依次遍歷相控陣天線作用空域內波束指向并相應改變轉臺姿態,即可完成相控陣天線作用空域內全部波束零值標定[9-10]。
2.1測試步驟
具體測試步驟如下:
①通過控制與信息處理設備控制相控陣天線各通道信號幅度和相位,使相控陣天線在指定方向形成波束。
②調整轉臺姿態,使相控陣天線產生的波束對準信標天線。
③信標天線將接收到的信號通過電纜傳輸至測量接收機接收解析,獲取測量結果。
④按照一定步進精度調整波束指向,重復上述過程完成對下一個指向波束零值標定。
⑤遍歷全空域指向波束,完成全空域指向波束時延標定。本測試過程中在方位軸上以1°為間隔,完成0°~359°全方位軸波束測試,在俯仰軸上以1°為間隔,完成15°~90°仰角波束測試。
2.2數據預處理
(1)扣除空間鏈路傳輸距離
由于測試轉臺臂長因素,導致不同指向波束測試時,相控陣天線幾何中心至信標天線空間鏈路距離不固定。空間鏈路計算如圖2所示,點為信標天線安裝位置,點為轉臺中心位置,為轉臺臂長。測試過程中,轉臺以點為圓心,以為半徑,在方位軸上進行旋轉,旋轉過程產生的半圓軌跡即為不同波束指向時相控陣天線幾何中心變化軌跡,可根據圖2中幾何關系求解出不同波束指向時的空間鏈路傳輸距離,并在偽距測量結果中進行扣除。
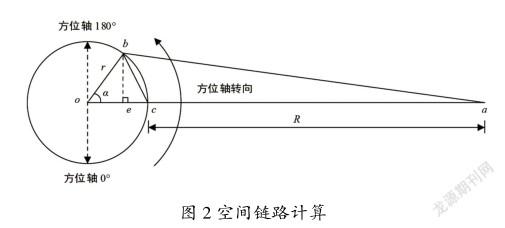
本測試中信標天線至轉臺距離=120m,轉臺半徑=2.4m,天線口徑=2.8 m。
(2)測量數據歸一化處理
用各方位軸上全部指向波束時延測量數據分別減去該方位軸上90°仰角波束時延,獲得歸一化的測量數據。
3測量數據處理分析
3.1全空域波束指向測量數據分析
采用偽距及載波相位2種方法獲得的波束時延數據分別如圖3和圖4所示,圖中左半軸表示0°~179°方位軸上不同仰角波束時延數據,右半軸表示180°~359°方位軸上不同仰角波束時延數據。


圖3中偽距測量結果變化最大約為6 ns,圖4中載波相位測量結果最大變化約為0.15 ns,載波相位測量結果比偽距測量結果在精度上高一個量級,同理論分析一致。偽距測量數據存在一些不規則的趨勢性變化,載波相位測量結果則具有較好的一致性。
3.2不同方位軸上波束時延一致性分析
以0°~180°方位切面為參考值,其他方位切面波束時延測量結果同參考值做差,對不同方位軸間波束時延一致性進行分析,如圖5和圖6所示。

由圖5和圖6可知,載波相位測量能夠獲得比偽距測量更加精密的結果,但2種方法測量數據變化趨勢基本一致。不同方位軸上同樣俯仰指向波束時延存在一定差異,在90°仰角方向時,時延差異最小,隨著波束仰角降低,波束時延差異逐漸變大,主要同相控陣天線特性有關,低仰角時相控陣天線波束變寬、通道間互耦增強、單元天線性能下降,導致波束整體性能下降,測量誤差變大。
3.3空間鏈路距離標定誤差對測試結果影響分析
載波相位測量可以獲得高精度測量結果,通過載波相位測量數據處理,分析空間鏈路距離標定誤差對測量結果影響。在數據處理過程中,分別改變圖2中所示空間距離數值,分別將在現有基礎上增加、減小10 m,對處理結果進行分析,空間鏈路距離誤差對波束時延影響如圖7所示。
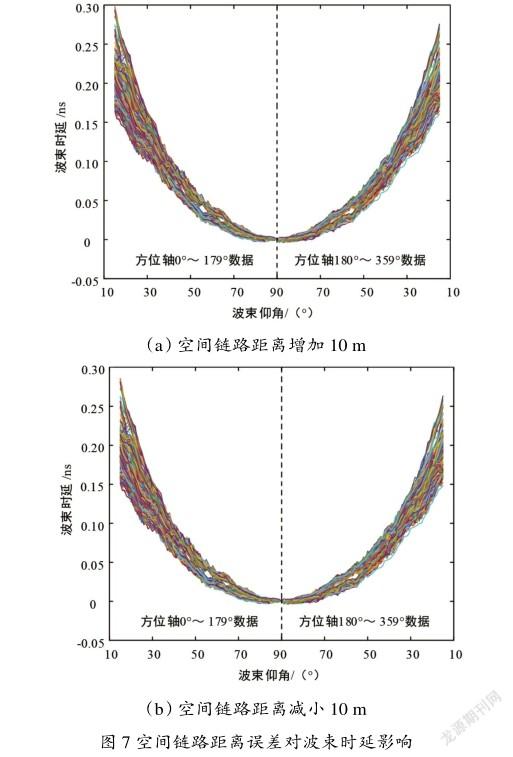
圖7為改變空間距離后波束時延的處理結果,圖4為未改變空間距離的處理結果,兩圖數據結果基本一致,說明空間距離誤差對波束時延測量結果影響較小,空間距離誤差不是影響波束時延測量的主要因素。
3.4轉臺臂長標定誤差對測試結果影響分析
理想情況下不同方位軸上波束時延近似白噪聲式分布,圖4中全空域指向波束時延呈二次拋物線趨勢分布,在數據處理中,轉臺臂長影響因素呈二次項曲線變化趨勢。由于轉臺機械結構復雜,標定作業空間受限,臂長標定過程中不可避免地引入誤差。通過載波相位測量數據可對轉臺臂長因素對波束時延測量影響進行分析。數據處理過程中,通過修訂臂長誤差數值,獲得扣除臂長誤差因素后波束時延,當轉臺修訂誤差增加8 cm時,獲得處理結果如圖8所示。

扣除臂長誤差因素后,波束時延近似呈白噪聲式分布,在90°仰角法線方向附近,波束時延波動幅度較小,隨著波束仰角降低,波束性能下降,導致波束時延波動幅度逐步增大。
3.5信標天線同轉臺相對指向誤差對測試結果影響分析
在進行信標天線指向標定過程中可能引入指向誤差因素,數據處理過程中,通過修訂指向誤差數值,獲得扣除指向誤差因素后的波束時延,當指向誤差修正量為0.1°時,數據處理結果如圖9所示。

對比圖8和圖9進行指向誤差修正前后數據,低仰角波束時延測量結果整體向上變化約0.02 ns,波束時延中包含的拋物線趨勢性誤差得到了進一步消除,因此開展測試工作前一定需要采用精密光學測量儀器對信標天線指向進行標定。
4結束語
研究了一種采用載波相位測量進行相控陣波束時延標定的方法,并搭建測試環境開展了試驗測試,測試數據表明載波相位方法測量精度比偽距測量方法高出一個量級。通過載波相位精密測量數據,進一步對影響測試結果的誤差因素進行了詳細分析,為方法工程化實施應用提供了理論支撐。
參考文獻
[1]魏海濤,蔚保國,李剛,等.衛星導航設備時延精密標定方法與測試技術研究[J].中國科學:物理學力學天文學,2010,40(5):623-627.
[2]韓春好,劉利,趙金賢.偽距測量的概念、定義與精度評估方法[J].宇航學報,2009,30(6):2421-2425.
[3]原亮,王宏兵,劉昌潔.天線時延標定在衛星導航技術中的應用[J].無線電工程, 2010,40(10):32-34.
[4]黃旭峰,馬煦.拋物面天線時延變化特性研究[J].數字通信世界, 2019(6):12-14.
[5]李雯.轉發式衛星測軌系統地面站設備時延標定方法研究[D].北京:中國科學院大學,2018.
[6] PRATAP M, PER E.全球定位系統:信號、測量與性能: Signals, Measurements, and Performance [M].北京:電子工業出版社,2008.
[7]李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2017.
[8]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社, 2011.
[9]尹繼凱,蔚保國,徐文娟.數字多波束天線的校準測試方法[J].無線電工程,2012,42(2):42-45.
[10]郝青儒.有源多波束天線方向圖測試方法研究.[J].無線電通信技術, 2008,34(5):39-42.
