基于OpenMV的水面漂浮物清理系統
2022-04-08 11:04:28姚貴發YAOGuifa殷睿新YINRuixin李金乘LIJincheng
價值工程 2022年11期
姚貴發 YAO Gui-fa;殷睿新 YIN Rui-xin;李金乘 LI Jin-cheng
(廣東嶺南職業技術學院,清遠 511500)
0 引言
環保是近幾年來一直熱議的話題,針對環保而衍生出來的技術也不在少數,其中水面漂浮物的治理是近年來備受關注關注的話題,在淺海區域、江河湖泊水面漂浮物問題越發嚴重。因為吞食垃圾造成死亡的海洋生物、淡水生物不計其數。該現象的產生主要是由于人類隨意排放垃圾造成。其中塑料類水面漂浮垃圾既難清理,也不易降解。漂浮在水面日積月累后將對水域形成災難性的破壞。針對水面漂浮物治理的辦法,國內外都做過不少研究,提出的治理方案不在少數。
水面漂浮類大多以塑料垃圾為主,有著體積小、移動快、難以清理的特性。目前解決水面漂浮物的辦法主要有人力打撈、清理船打撈、劃分區域治理等措施。對于小規模的采用人力打撈,比如城市河道、公園等,但這種方式工作效率低,打撈過程容易遺漏不能全面清潔,且無法長時間工作,實時預防,可針對的水域也較少;清理船打撈可用于在大面積水域的清理工作,但這種方式能耗大,同樣需要人員操作船只;劃分區域治理是目前效率較高的,具有效率高、清理效果好,還可利用太陽能為自身進行能源供給等優點,但劃分區域治理設置相對固定成本高,適用于海洋治理。對小湖泊、內陸河道來說無法開展治理工作。
設計研究一款基于OpenMV的水面漂浮物清理系統的水上清潔衛士,其能夠實現無人化遠程控制,快速收集水面漂浮垃圾的自動裝置。取代人力打撈、大型設備清理等方法。具備靈活投放、隨時站崗、自動清潔等功能。
1 系統設計
水上清潔衛士主要以Arduino、OpenMV垃圾收集器、巡航船、船體支架、水下推進器、船體支架、監控攝像頭、電池電源等結構組成。
水上清潔衛士有兩種模式:
自動模式的時候OpenMV負責識別水面漂浮物,當識別到水面上有垃圾時,就會向Arduino發送信號,Arduino接收到之后就會驅動無刷直流電機,無刷直流電機帶動渦輪旋轉,使水上清潔衛士前往漂有垃圾的水域進行收集;
手動模式下,可以通過手機對水上清潔衛士進行操控,利用手機APP操控設備進行移動;如圖1所示。

圖1 工作流程圖
2 Arduino
Arduino是基于ATmega328的主控開發板。Arduino是采用USB接口的核心電路板。本文主要用其對無刷直流電機進行操控,和連接JDY-18藍牙模塊。
2.1 通訊
當OpenMV識別到水上漂浮物,并要讓水上清潔衛士前往清理,首先需要將識別到的信息通過串口發送給Arduino,由于Arduino串口有限,其還需要向無刷直流電機輸出信號,無法同時做到接受和發送,因此要想實現與OpenMV進行通訊,還需要設置模擬串口用來接受OpenMV發送過來的信息。
Arduino與OpenMV進行通訊需要準備3根線:TX、RX、GND。TX為發送端,RX為接收端,GND為接地線,接線時只要將Arduino與OpenMV的TX和RX交叉接線即可。此種設計下的傳輸速度是可控的,可以設置兩者的通信傳輸速率為9600波特率或者4800波特率,具體數值可根據實際情況靈活選擇[1]。
2.2 OpenMV
OpenMV是一個以STM32F765VI ARM Cortex M7處理器為核心,集成了OV7725攝像頭芯片的機器視覺模塊,其搭載了Micro Python解釋器,可用Python語言高效地實現核心機器視覺算法[2]。OpenMV機器視覺算法包括物體檢測、尋找色塊、人臉檢測、顏色跟蹤等功能,可以用來實現產品的分類、殘次品篩選、非法入侵檢測、跟蹤固定的標記物等,具有穩定性高、傳輸效率高等特點[3]。
OpenMV采用的是單目攝像頭,單目攝像頭要想實現測距,需要選擇一個參照物,利用參照物大小的比例來計算距離。
假設在單目攝像頭前放一個小球,根據小孔成像原理,小球距離攝像頭越遠,攝像頭里的小球則越小。
其中的Ap(Apix)表示攝像頭圖像的像素;Bp(Bpix)表示被測小球的直徑的像素;α為視場角;Lm為被測目標物體與攝像頭的距離;f為相機焦距,焦距f的長短決定了相機所拍攝的目標物體的成像大小、視場角大小、景深大小,以及畫面的透視強弱。當對同一物距的同一目標物體拍攝時,f越大,α越小;f越小,α越大。
由圖2的幾何關系可得下列公式(1)和公式(2):
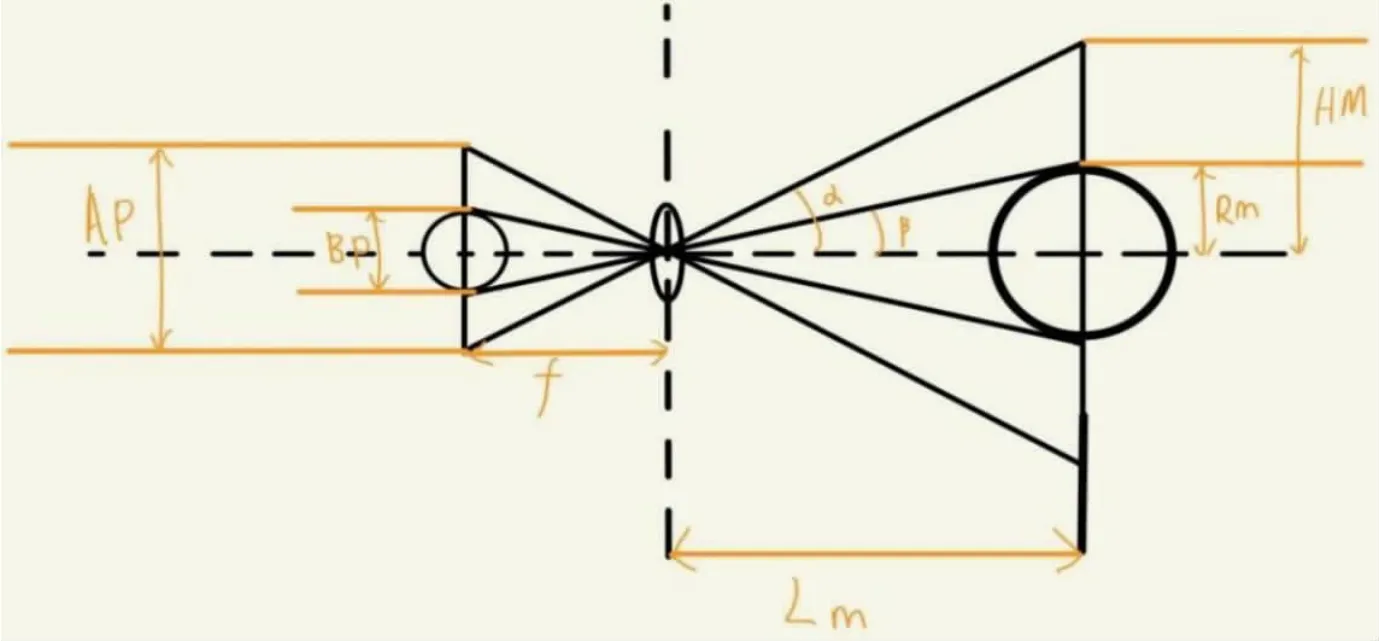
圖2 小孔成像原理示意圖
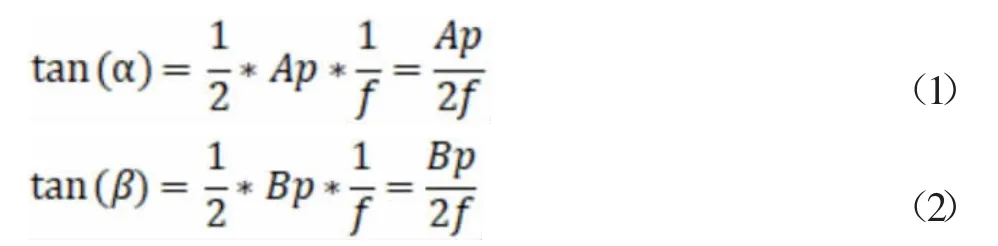
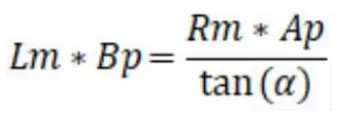
可得公式(3):

根據圖2中右邊真實環境中的幾何關系得公式(4):

將公式(4)代入公式(3)得:
由所得公式可知:實際長度和攝像頭里的像素成反比。簡單來說就是距離=一個常數/直徑的像素,通過這個公式,便可以實現測距的算法。剛開始時,還不知道常數k的值是多少,要想求得常數k的值需要先手動測量出目標物體距離OpenMV的長度,接著通過OpenMV連接上OpenMV IDE觀察目標物體在OpenMV視野中的像素點的個數為多少。將得出像素點的個數和距離帶入公式便可求出常數k的值。
此時已經得出了常數k的值,k值是固定的,但目標物體像素點個數和距離是時刻在變化的,所以接下來需要通過設計算法,讓OpenMV自動得出視野中目標物體的像素點個數:通過Lm=(b[2]+b[3])/2這個算法得出OpenMV自動得出視野中目標物體的像素點個數,其中b[2]為識別到的目標物體的長的像素,b[3]為目標物體的寬的像素數,通過將b[2]和b[3]相加之和然后取其平均值得出目標物體的像素點個數的平均數。最后將通過k值和Lm值來測量目標物體距離OpenMV的實際距離length,大致示例程序如下:
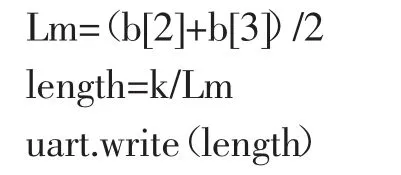
得到目標物體距OpenMV的距離length后通過串口將length值發送給Arduino,使Arduino做出正確的指令。
2.3 嵌入式機器學習
要想實現讓水上清潔衛士在工作水域里找到哪里有水面漂浮物,并前往收集,需要讓水上清潔衛士通過機器學習讓其識別那些是需要清理的水面漂浮物,比如:礦泉水瓶、塑料袋、煙頭等,都可以通過機器學習使水上清潔衛士認識這些東西。
水上清潔衛士采用的是嵌入式機器學習,可以通過EDGE IMPULSE的在線網站來訓練神經網絡模型,EDGE IMPULSE可以為嵌入式產品快速的生成在嵌入式上面使用的神經網絡模型,大約5分鐘就可以訓練出一個可以在OpenMV上使用的模型。
用OpenMV來訓練神經網絡模型,大致分為3個步驟:
①首先是采集,利用OpenMV IDE來采集數據集(Data set),也就是拍照,每一個分類至少需要100張左右的數據集來進行訓練,這些照片盡量以不同角度、不同光線來制作;②上傳至EDGE IMPULSE,上傳時可以設置好訓練集(Training data)和測試集(Test data)的比例,一般情況下可以將圖片的80%設置為訓練集,剩余的20%作為測試集,測試集只用于對最后訓練好的模型進行測試模型的準確率。③將數據集上傳成功后,做一些簡單的設置就可以開始訓練模型,這里采用遷移學習(Transfer Learning)的方式進行訓練,訓練完成后會生成兩個features,一個是bottle,一個是can。下一步就是對圖像的DSP預處理,在DSP預處理后會生成一個長寬比1:1的圖像,并且會給每一張圖片生成features,features生成輸出完成后會生成一張三維散點圖,從圖3可以看出,代表bottle和can的兩種顏色基本是分離的,基本沒有混合在一起,這就說明數據集采集的還算不錯,如果兩種顏色交叉混在一起,就說明前期的數據集的采集特征不夠明顯,有可能是圖片背景復雜或者采集的圖片種類不夠豐富,這些都可能導致特征不明顯。
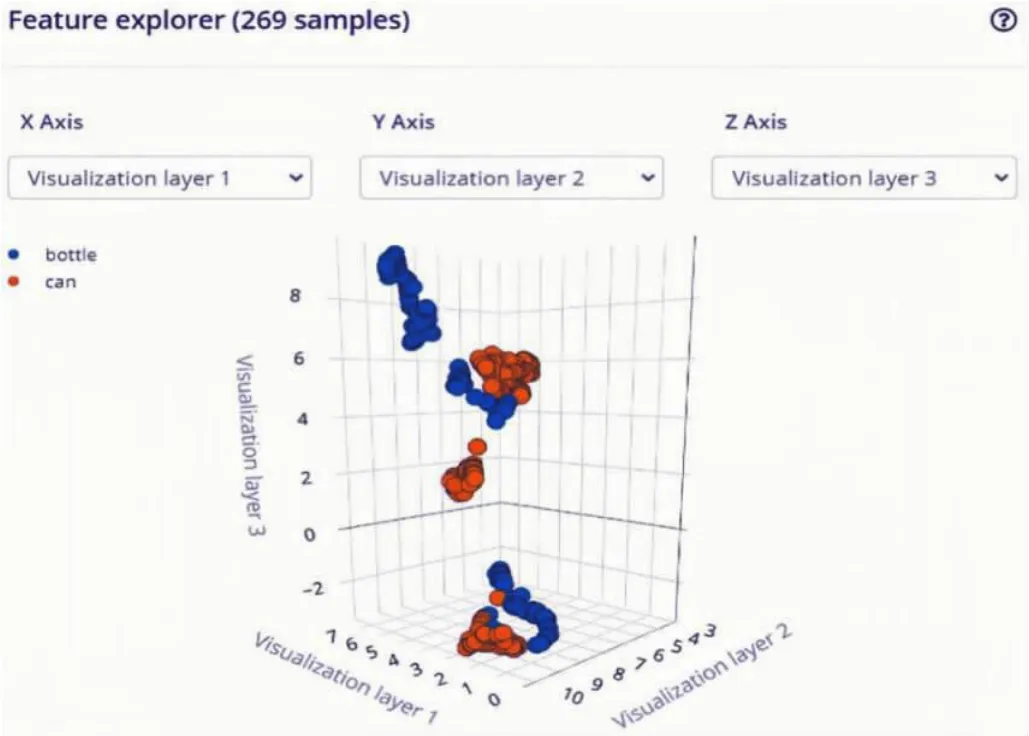
圖3 三維散點圖
接下來就可以進行遷移學習,將機器學習的輪數設置為20,置信度為0.8,然后開始訓練,在正常情況下訓練過程中隨著機器學習輪數的增加LOSS值會越來越低,準確度accuracy值會越來越高。
訓練完成后可以看到訓練后得出的數據,通過剛才采集的數據訓練出來的模型的準確度為92.6%,失敗為0.16,從表格中可看出有18.2%的塑料瓶被識別成了易拉罐。如圖4和圖5所示。
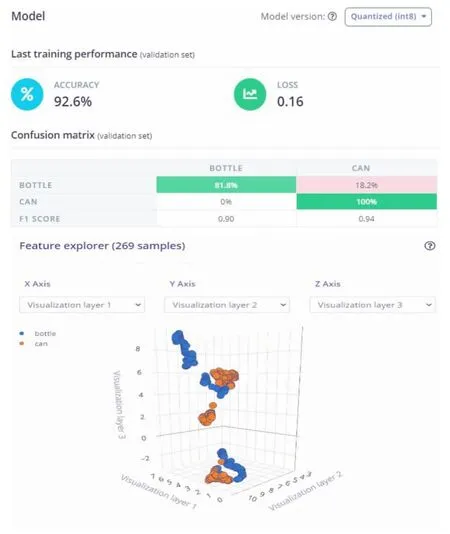
圖4 訓練結果
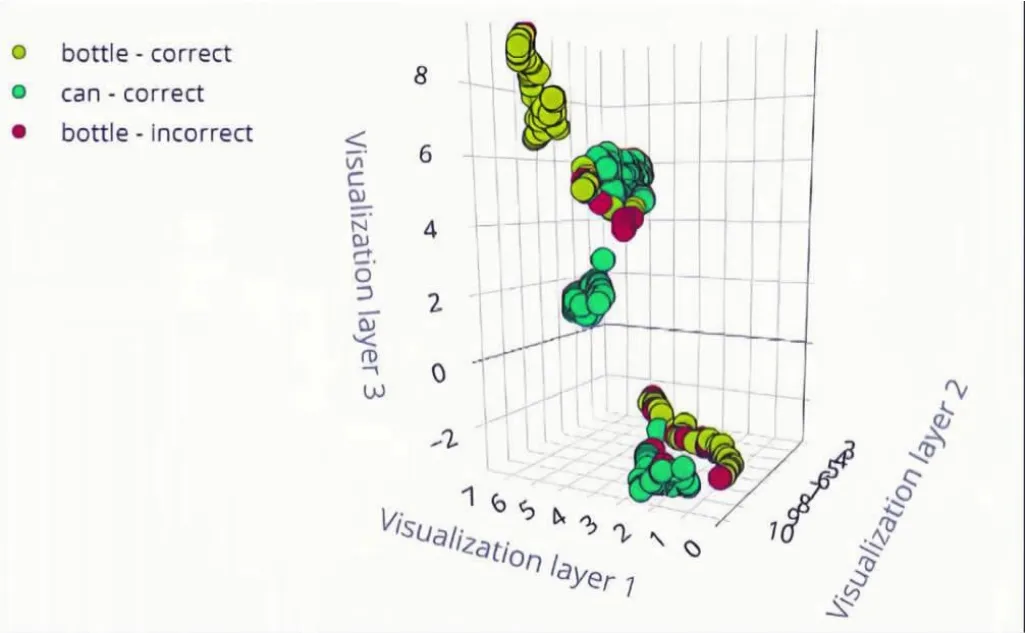
圖5 bottle和can識別是否正確的三維散點圖
將訓練好的模型下載保存到OpenMV即可。
當水上清潔衛士在工作時,攝像頭會時刻開始,當OpenMV識別到為漂浮物時,會通過串口通訊將信息發送給Arduino,Arduino便會驅動無刷直流電機前往目標水域,否則則采取避障。
2.4 JDY-18
在水上清潔系統中,JDY-18將負責Arduino與手機的通訊連接。JDY-18透傳模塊是基于藍牙4.2協議標準,工作頻段為2.4GHz范圍,調制方式為GFSK,最大發射功率為0db,最大發射距離60米,采用進口原裝芯片設計,支持用戶通過AT命令修改設備名、服務UUID、發射功率、配對密碼等指令,方便快捷使用靈活。
通過使用JDY-18藍牙模塊不僅成本較低,操作靈活方便,經過實際Arduino連接JDY-18藍牙模塊后對水上清潔衛士控制結果表明:能夠實現精確手動控制水上清潔衛士向既定目標運動[4]。
2.5 水下推進器
水上清潔衛士在水中的動力靠的是水下推進器完成的,水下推進器的電機采用的是無刷直流電機。通過水上清潔衛士系統中的Arduino控制推進器,完成對推進器中無刷直流電機的控制,包括轉向、轉速、啟停控制。
無刷直機電機的驅動方式根據不同的需求,可分為多種驅動方式。
2.5.1 方波驅動 這種驅動方式實現起來簡單方便,容易實現電機無位置傳感器控制;
2.5.2 正弦驅動 這種驅動方式可以改善電機運行效果,使電機輸出力矩均勻,但正弦驅動實現過程相對復雜。正弦驅動又可分為SPWM和SVPWM(空間矢量PWM)兩種方式,SVPWM的效果好于SPWM。
本文采用的是正弦驅動的SVPWM對無刷直流電機進行控制。SVPWM是電調信號信號頻率為50Hz,一個周期為20ms。對于電調來講,高電平脈寬為1ms表示停轉,高電平脈寬為2ms表示滿油門運轉;Arduino可以直接用Servo庫來給實現ESC信號的輸出。
3 整體設計
水上清潔衛士主要應用范圍是湖泊、海洋海岸等相對靜態水域。水上清潔衛士作為可以在水上清潔垃圾的裝置最主要的任務就是做好收集垃圾的工作,而工作環境對清潔效率和清潔效果也至關重要。工作環境的水域不是一成不變的,有可能水面漂浮的不一定是垃圾,也有可能是油脂;工作時吸進去的漂浮物還要做到只能“進”不能“出”。因此在設計之處就已經考慮到水上清潔衛士的工作水域可能會遇到的環境,和如何保證吸進去的水面漂浮物不隨便“吐出”的問題。
4 結構設計
設備主要分為兩部分運輸浮船與垃圾收集裝置(過濾浮桶)。垃圾收集裝置通過小型浮船,運輸到垃圾集中區域進行投放,并能夠獨立漂浮在水面。垃圾收集裝置為桶狀,分為外筒與過濾網兩部分,豎直潛入水下,桶口進水處略低于水面,底部密封只留有抽水泵的排水口,工作時利用抽水泵抽空裝置內部的水,造成液壓差,周圍的流水會源源不斷的流入桶內,水面漂浮垃圾跟著水流進入到清潔裝置內部,再通過過濾網實現垃圾與水流分離,使得漂浮垃圾留在收納盒里,完成垃圾的清理。出水口設置止逆刷,防止垃圾回流。如圖6所示。
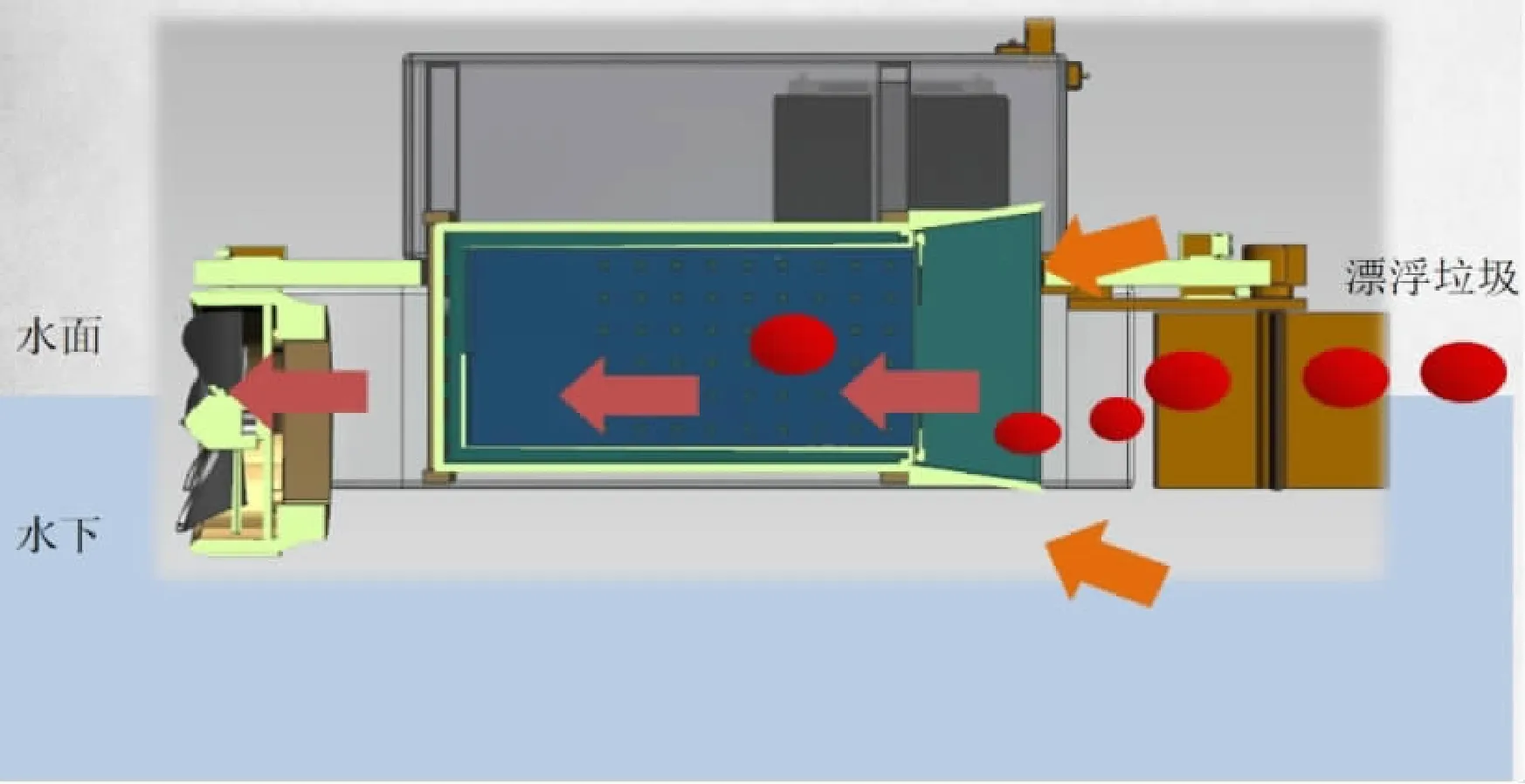
圖6 清潔衛士工作原理
清潔衛士的垃圾收集桶里面還內置多層過濾網,當水流經過多層濾網的過濾,將水面漂浮垃圾困于第一層濾網內,完成水面漂浮垃圾的清潔;第二層濾網材料采用碳海綿進行吸附油料凈化水源。
水上清潔衛士的供能系統由蓄電池、調壓元件和太陽能發電板組成,設計利用太陽能進行發電、供電續航監控系統級,監控、收集數據以及采樣作業技術。這樣一方面可以減少人力成本,另一方又減少能源消耗產生的碳排放,可以讓水上清潔衛士更長效的工作。
5 結論與應用
本文設計的水上清潔衛士能夠自動識別工作水域中的水面漂浮物,并對這些水面漂浮物進行收集,讓水上清潔衛士實現識別水面漂浮物,這一功能是通過遷移學習的方法來訓練模型,然后OpenMV通過訓練好的模型進行判斷,以實現分辨哪些時水面漂浮物,然后通過串口通訊將信息發送給Arduino,讓Arduino判斷是否需要前往清理。除了水上清潔衛士自主工作模式外,還可以通過手機APP連接JDY-18藍牙模塊,進而實現手動操控。當水上清潔衛士將清理的垃圾吸進來后,為了防止垃圾倒流,可以通過止逆刷防止垃圾流出,當面對漂有油脂的水域時也可以對油脂進行清理。
水上清潔衛士除了擁有智能的工作模式,還擁有節能環保的供能系統,對比之下目前使用比較廣泛的水面打撈船,主要采用柴油驅動,相比之下水上清潔衛士的碳排放要少的多。
水面清潔衛士前景廣闊,因其造價成本不高,操作簡單,工作智能化的特點,降低了實驗階段的難度,可以快速投放市場應用。隨著國家近幾年不斷加大力度對于水資源污染問題進行治理,該設備的服務對象既可以是政府機構,也可以是環保公司,尤其是在公園、小區景觀、城市內河等場景有著較好的效果。
