基于IR2110的打印機高頻逆變器的設計與實現
2022-04-09 19:01:03夏愉樂樊金宇
電子產品世界 2022年3期
夏愉樂 樊金宇





摘要:為了利用IR2110芯片實現大功率高頻逆變器的目的,采用PIC16F716單片機實現PWM波形,并以IR2110芯片作為驅動器控制大功率MOS管的通斷,實現DC到AC的變換的方法。通過仿真測驗的良好表現,證明此逆變器系統不僅適用于家用電源逆變系統,還可用于新能源裝置的逆變系統中,對新能源電源的設計具有一定的參考價值。
關鍵詞:IR2110;PIC16F716單片機;PWM波;高頻逆變電源
當今社會,開關電源等方面的技術已經在電力電子應用及各種電源系統部分處于重要位置。隨著高頻開關電源技術的不斷發展,其不僅改變了傳統電路龐大又笨重的外觀結構缺點,而且極大地為電源部分電能的回收利用效率做出卓越貢獻,既節省了材料,又降低了成本。逆變技術的研究對工業技術的發展和人民生活水平的提高都具有重大的意義[1]。
由電力電子技術的發展來看,逆變器是較早采用的一種DC/AC(直流/交流)變換裝置,逆變器是把直流電能轉變成交流電能,一般由逆變橋、濾波電路及控制邏輯等部分組成。逆變器廣泛適用于家庭電器設備中。根據市場發展趨勢的需要,逆變器的造型安裝越來越傾向于小型化、智能化、模塊化等方向發展[2]。
1??? 系統設計方案
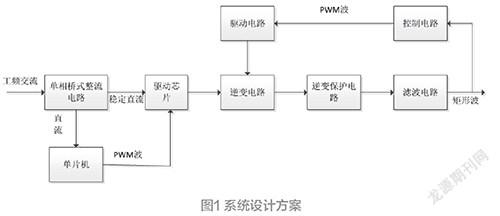
本文設計的逆變器小系統首先通過工頻220 V電壓輸入接線柱后由降壓變壓器輸出24 V交流電壓,輸出的24 V交流電壓經過單相橋式整流電路、兩塊穩壓電路及若干二極管濾波后,輸出兩路穩定的直流電壓(15 V和5 V)為單片機及驅動芯片供電[2]。同時,在線串行編程寫入程序到單片機后產生的PWM(脈沖寬度調制)波觸發兩塊驅動芯片產生兩相四路PWM波,兩相四路的PWM波分別產生互補的高通與低通信號分別驅動相應的MOS(MOSFET的縮寫,金屬氧化物半導體場效應晶體管)管后形成電壓型全橋逆變電路。最后,在負載處可以檢測到產生的互補矩形波,輸出電壓220 V、50 Hz交流電壓,最大輸出電流2.5 A,最大輸出功率不低于100 W。如上即完成整個逆變過程,系統設計框圖如圖1所示。
2??? 系統硬件設計
2.1??? 驅動芯片IR2110
IR2110驅動芯片由美國國際整流器公司(現已被英飛凌公司收購)生產[2],具有光耦隔離和電磁隔離等特性,因其體積小、速度快等優點,成為大多數中小功率變換裝置中驅動器件的首選。
2.1.1??? IR2110的工作原理
電平平移、邏輯輸入、輸出保護等特點是組成驅動芯片IR2110內部功能結構的三個主要部分⑵。系統電路搭建設計部分之所以能避免許多麻煩,正是基于IR2110驅動芯片的諸多優點。比如在高位電壓懸浮自舉電源電路的設計環節,就是通過了一組電源對上下端口之間的有效控制,從而盡可能多地控制了額外使用驅動電源的個數。
高端側懸浮驅動電路的自舉原理簡單分析:IR2110驅動芯片中的驅動半橋電路如圖2所示[3]。圖中可知C1、VD1分別表示自舉電容和自舉二極管,C2是供電電壓Vcc的濾波電容。
首先假設S1處于關斷時,自舉電容C1所能承受的電壓已達到飽和狀態,即VC1≈Vcc。當HIN處于高電平狀態時,其中VM1開通、VM2關斷,VC1電壓加于S1柵極和源射極之間。那么此時,自舉電容C1經由Rg1、VM1、柵極和源極部分構成了一個回路來進行放電,可以把VC1等同于電壓源,進而觸發S1開通。然而已知HIN、LIN之間的信號是互補輸入的,當LIN為低電平時,VM3關斷,VM4導通,此時電荷在S2柵極以及源極的芯片內部急速地通過Rg2對地釋放電能。此時受到死區時間波及,促使S2在S1導通之前就關斷了[3]。
在HIN位于低電平狀態時,VM1關斷、VM2開通,此時S1柵極內的電荷會經Rg1、VM2迅速被釋放掉,從而觸發S1關斷。經過片刻的死區時間(td)之后,LIN變成高電平,從而使S2達到開通狀態,供電電壓Vcc通過S2、VD1給自舉電容C1充電,以此急速地給自舉電容C1增加電能。如此反復循環。
2.1.2??? IR2110逆變電路
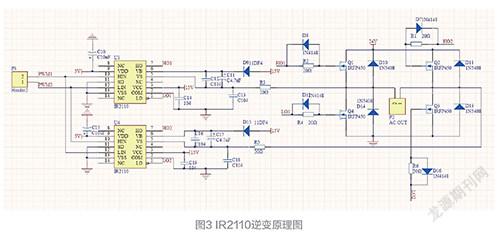
IR2110逆變原理圖如圖3中所示,U3、U4是兩塊IR2110驅動芯片,Q1、Q2、Q3、Q4分別為4個MOS管,Ua、Ub和Va、Vb分別為PIC16F716單片機輸出到驅動芯片引腳的兩相四路PWM波,由圖可知Ua、Ub為一相PWM波中的上下霄,Va、Vb則為另外一相PWM波中的上下霄,由于PIC16F716單片機觸發輸出到驅動芯片部分的PWM波達不到驅動大功率MOS管的能力,那么只有通過IR2110中的電容自舉功能的特點,分別由二極管D9、D15(采用肖基特管所具有的快恢復功能,提升電容充電電壓,關斷過程減少消耗能量)對自舉電容C11、C12、C16、C17來充電,以此達到提高驅動MOS管的信號端電壓,以便其擁有增加信號端輸出的功能,所以增加后的信號PWM波就能持續地控制MOS管Q1、Q2、Q3、Q4的開通以及關斷。此外驅動信號在逆變電路中同相位的上下臂之間是互補的[4]。
由圖3可知,當Ua處于高電平狀態時,那么輸出端HO1同為高電平狀態,以此可以由IR2110芯片的電容自舉功能,來控制MOS管Q1開通。與此同時,因為輸出端LO1為低電平,達不到驅動MOS管Q4的能力,則MOS管Q4處于關斷的狀態。在同一時刻,給Vb也輸入一個高電平,即輸出端LO2是高電平狀態,那么使MOS管Q3處于導通狀態,而Q2此時是關段狀態。所以由HO1→Q1→P2→Q3→GND就構成了一條通路。反而言之,當Ua、Vb處于低電平狀態,而Ub、Va為高電平狀態,此時的電流流向變為由HO2→Q2→P2→Q4→GND的一條通路,其中的開關器件(4個MOS管)有序地交替開通以及關斷,從而導致在P2(負載端)位置形成了交流電。由于在實際應用中經常會發生芯片的上下臂間同時導通而引起的短路,所以在軟件設計的環節中,額外添加了死區時間來防止短路現象,以此來保護整個電路正常運行[5]。
2.2??? 單片機系統
美國Microchip(微芯)公司生產的PIC系列單片機具有集成外圍模塊多、性能方面穩定、硬件系統設計簡單、功耗低等諸多優點,所以本文選取PIC16F716單片機作為逆變器的主控制器部分[5]。因為PIC16F716單片機不用額外附加A/D(模擬/數字)轉換器件,而且自帶4個8位A/D轉換通道,所以這些特點就大為節省了電路設計的成本[4-6]。與此同時,PIC16F716單片機中內置上電延時定時器(DWRT)、雙閥值欠壓復位電路、可編程代碼保護、上電復位電路(POR)、看門狗定時器(WDT)、振蕩器起振定時器(OST)、帶片內RC振蕩器、在線串行編程(ICSP)等。這些功能特點可以降低電路器件的成本、減少單片機外部器件的數量,從而可以盡可能多地減少整個系統設備尺寸大小,在實際應用中擁有很強的成本優勢[6]。
PIC16F716單片機[9]在本系統設計中是采用半橋輸出配置以及增強型PWM模式(即單片機可以供給由P1A一直到P1D的四路輸出),大多數情況下可以在半橋輸出模式中把兩個引腳作為輸出驅動的推拉式負載使用。圖4是PIC16F716單片機小系統外圍電路的引腳圖,其中半橋臂通常由RB1與RB2掌控(通常為了避免在半橋輸出模式時大功率器件發生直通現象,用可編程死區以達到延時的目的),RB5/P1B引腳是PWM波輸出信號,RB3/CCP1/P1A引腳則是互補的PWM波輸出信號。此外,輸出信號是由IR2110芯片來驅動的[6-8]。
2.3??? 保護電路設計
本文逆變電源設計中有保護電路,如圖5所示。當逆變輸出電流超過2.5 A時,過流電流ACK大于4.5 V,SPWM芯片檢測到ACK大于2.5 V時,則進入逆變保護,LED_P燈閃爍。反之,LED_L燈閃爍。輸出濾波電路選用LC電路,設計中參數L=1 mH,C=3 uF,截止頻率2.5 KHz。
3??? 系統軟件設計
3.1??? PWM波的實現原理
本文利用PIC16F716單片機中自帶的增強型捕捉/比較/PWM模塊(以下簡稱ECCP模塊)就可快速實現兩路輸出互補對稱的PWM波[8]。只要正確設置ECCP模塊的工作模式中寄存器CCP1CON、周期寄存器PR2、脈寬寄存器CCPR1L這三個部分的值即可產生所需要的PWM波。此模塊的工作模式有全橋、半橋等多種工作模式,本次軟件設計采用的是半橋模式,信號極性設為高電平有效。在半橋輸出模式下,有兩個引腳用作輸出驅動推拉式負載,RB3引腳輸出PWM輸出信號,RB5引腳輸出互補的PWM直通輸出信號。此外,可編程死區延時可以在半橋輸出模式的情況下來避免半橋電路中現象。
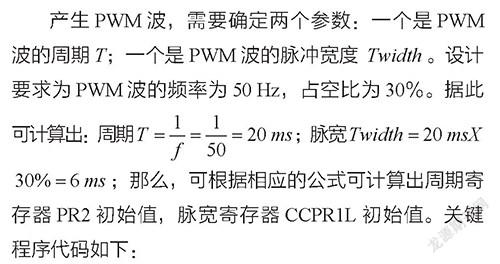
3.2??? 參數計算與配置
//設置工作模式為PWM模式
CCP1CON=0B10001100;
//死區控制設置
PWM1CON=0X01;
//設置TMR2工作模式
T2CON=0X00;
//設置對稱脈沖周期參數
PR2=g_Period;
//設置脈沖寬度值
CCPR1L=g_DutyWidth;
//關閉T2中斷
TMR2IE=0;
//啟動T2定時器
TMR2ON=1;
3.3??? 程序實驗結果
將程序下載至單片機后通電測試,用雙蹤示波器測得RB3和RB5的輸出波形,如圖6所示,從圖中可以觀察得知信號的大小和方向隨時間做周期性變化,滿足逆變后標準的交流信號的特點,結果符合逆變電路要求。
4??? 結論
本文通過逆變電路原理結合單片機技術最終完成了基于SPWM技術的獨立逆變電源的設計。實驗表明,通過采用軟件編程實現SPWM波序列的輸出,實現了單片機控制芯片PIC16F716的PWM模塊輸出功能[9]。
本文逆變電路采用了全橋電路設計,在全橋逆變過程中,利用了Microchip公司的PIC16F716芯片為基礎完成SPWM專用芯片的設計,不僅簡化了系統電路,更提高了電路效率,實現了電路結構的高頻化、小型化。整流逆變器實物圖如圖7所示。
參考文獻:
[1]魏巍,王興蔚,龔軍勇,等.逆變電源中自舉供電驅動電路設計[J].磁性材料及器件,2013,44(06):63-66.
[2]周成虎.礦用大功率逆變電源電路的設計[J].煤礦機電,2013(05):33-35.
[3]盧旭錦,王永強.基于ATmega8單片機控制的正弦波逆變電源[J].現代電子技術,2013,36(08):149-152.
[4]王大貴,潘文勝.基于SG3525A和IR2110的高頻逆變電源設計[J].電子設計應用,2006(11):120-122.
[5]廖家平,袁兆梅,張治國.基于單片機PWM控制逆變電源的設計[J].中國水運(理論版),2006(05):172-173.
[6]楊蔭福,李勛,何湘平.IR2110在2kW、400Hz IGBT逆變電源中的應用[J].船電技術,1999(04):1-5.
[7]王議鋒,崔玉璐,馬小勇,等.一種交錯并聯雙Buck全橋型雙向并網逆變器[J].電工技術學報,2019,34(21):4529-4539.
[8]張豐年.100kW感應加熱軟開關逆變器設計[D].沈陽:沈陽工業大學,2019.
[9]周君民.小型垂直軸風機并網逆變器的研究[D].濟南:山東大學,2019.
[10]楊立永,王元,劉碩.雙頻雙模并網逆變器拓撲結構及控制方法研究[J].電力電子技術,2019,53(01):30-33.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45