
融合軌枕檢測和卡爾曼濾波的中低速磁浮列車測速定位優化算法研究*
2022-04-11 10:36:44潘洪亮唐少強
城市軌道交通研究 2022年3期
潘洪亮 邱 宇 唐少強
(1.同濟大學道路與交通工程教育部重點實驗室, 201804, 上海; 2.同濟大學磁浮交通工程技術研究中心, 201804, 上海∥第一作者, 副研究員)
計數軌枕測速定位是一種在中低速磁浮領域使用較多的列車測速定位方法。該方法具有設備簡單、造價低、易于安裝等優點,使其成為解決中低速磁浮列車測速定位較好的解決方案。但是,該方法存在低速時測速不準、高速時脈沖可能漏檢等問題[1],其可靠性和檢測精度難以保證。本文在文獻[2]的基礎上,克服了列車振動和計時誤差等因素,對該方法作進一步的改進,以得到更為可靠、準確的速度和位置信息。
1 檢測方法及原理
1.1 基于鋼軌軌枕的計數檢測方法
中低速磁浮線路在軌道結構中布置鋼軌軌枕,電感式渦流傳感器經過鋼軌軌枕時會產生脈沖信號,通過累計磁浮列車經過的鋼軌軌枕數目,結合軌枕間距,就可以實現對列車運行距離、運行速度等運動學參數的計算。文獻[2]中,在線路上相鄰傳感器間距D固定的情況下,可利用列車通過相鄰傳感器的時間差ΔT來計算列車的運行速度V:
(1)
基于鋼軌軌枕的測速定位方法原理如圖1所示。此方法只需要在工程應用中控制D的精度,即可實現對列車的測速定位。由于中低速磁浮線路軌道的選線型式多樣、軌道轉彎時存在內徑和外徑的差別、線路上存在車站、橋梁、道岔等特殊區段,采用該方法進行檢測時存在一定的難度,因此,在實際的工程應用中不會單獨采用鋼軌軌枕計數方法來實現列車的測速定位。

a) 整體布置
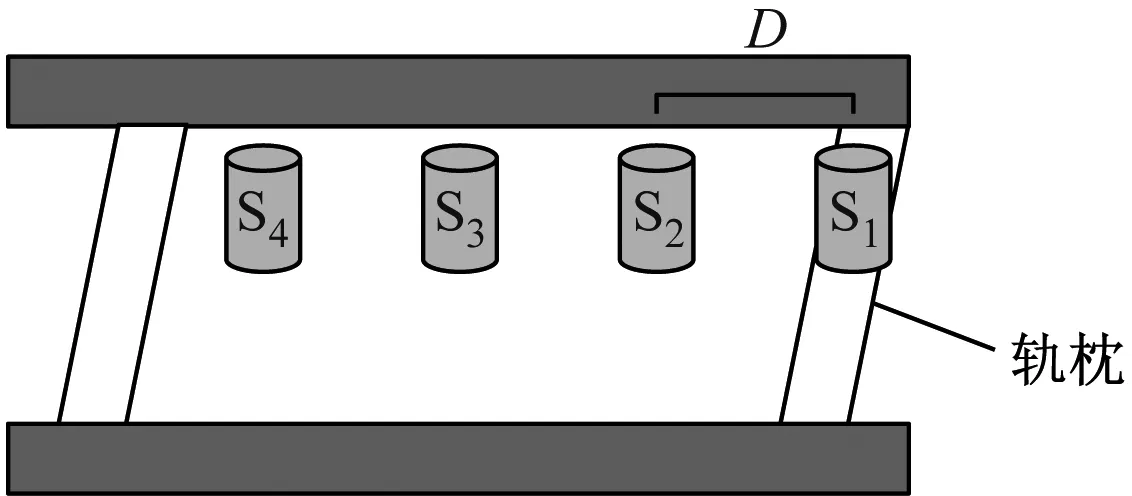
b) 渦流傳感器與軌枕位置關系注:S1、S2、S3、S4為傳感器。圖1 基于鋼軌軌枕的測速定位方法原理
1.2 卡爾曼濾波原理
卡爾曼濾波是當前廣泛使用的一種濾波方法,其基本思想為利用上一時刻預測的此時刻狀態及此時刻的觀測狀態來找到最接近真實狀態的解。假設線性離散系統的數學模型為[3]:
X(k)=F(k,k-1)X(k-1)+Γ(k,k-1)A(k)
(2)
C(k)=H(k)X(k)+B(k)
(3)
式中:
X(k)——k時刻的系統狀態向量;
X(k-1)——k-1時刻的系統狀態向量;
F(k,k-1)——k-1時刻到k時刻的系統狀態轉移矩陣;
Γ(k,k-1)——k-1時刻到k時刻的系統噪聲矩陣;
A(k)——k時刻的系統噪聲向量;
C(k)——k時刻的系統觀測向量;
H(k)——k時刻的系統觀測矩陣;
B(k)——k時刻的量測噪聲矩陣;
k——列車運行的某一時刻。

(4)
P(k|k-1)=F(k,k-1)P(k-1)FT(k,k-1)+
Γ(k,k-1)A(k-1)ΓT(k,k-1)
(5)
式中:

P(k-1)——k-1時刻的系統估計協方差;
P(k|k-1)——由k-1時刻預測的k時刻系統估計協方差;
A(k-1)——k-1時刻的系統噪聲向量。
求解卡爾曼濾波系數K,其計算式為:
(6)
式中:
K(k)——k時刻卡爾曼濾波的增益;
R(k)——k時刻量測的噪聲協方差矩陣。


(7)
P(k)=[I-K(k)H(k)]P(k|>k-1)
(8)

(9)
式中:
e(k)——k時刻殘差;
I——單位矩陣。
2 融合軌枕檢測和卡爾曼濾波的優化算法
2.1 對傳統軌枕檢測方法的優化
2.1.1 對傳統軌枕檢測方法的優化計算
在理想情況下,每個渦流傳感器均能在某一時刻到達金屬軌枕上方。基于此原則,記錄每個脈沖的上升沿時間Tij,從而得到時間矩陣
(10)
其中:i表示第i個傳感器所記錄的時間序列,i≤m;j代表第j個金屬軌枕,j≤n。m個傳感器依次通過同一個金屬軌枕后再依次通過下一個金屬軌枕,算得相鄰傳感器通過同一軌枕的速度Vij=D/(Tij-T(i-1)j)。但是在實際的運行中,由于存在列車抖動、傳感器誤差、記時器誤差等因素,將此時傳感器到達金屬軌枕后記錄的上升沿時間記為tij,則tij與實際時間Tij之間會有一定偏差,即tij=Tij+lij,lij為所記錄時間的隨機噪聲。設Td為實際測量的時間矩陣,vij為實際情況下相鄰傳感器通過同一軌枕后所計算得到的速度,則有:
(11)
(12)
假設中低速磁浮列車以10 m/s勻速運行,若D=0.3 m,則通過相鄰傳感器的時間為0.03 s,中間間隔1個傳感器時的通過時間為0.06 s,中間間隔2個傳感器時的通過時間為0.09 s。即使列車以0.09 s的時間間隔進行采樣,仍然能及時獲取列車的速度位移信息。而計數軌枕方法的實質是計算2個傳感器均以某個平均速度通過一定距離時脈沖上升沿的時間差,以獲得一定位移下的間隔時間,因此,當列車的速度較為穩定時,位移越大,在相同時間誤差情況下對速度的大小影響越小,速度與真實值越接近。在速度較大時,相鄰傳感器經過同一金屬軌枕時的時間間隔亦較小。

重復上面的計算步驟,計算中間間隔2個傳感器時的通過時間及其矩陣群,對得到的速度數據進行加權平均,則可以得到中間間隔了2個傳感器時的列車運行平均速度。以此類推。
2.1.2 不同運行條件下列車運行平均速度的計算
在進行優化計算時,一方面應考慮到時間誤差對速度的影響,另一方面還應考慮速度的準確性。上文的優化方法可根據不同速度采用不同的算法來處理數據。可按照以下條件分類計算速度:
1) 條件一,當列車低速行駛或列車的加/減速度較大時,采用一般算法,計算每個相鄰傳感器通過金屬軌枕時所記錄時間的速度;
2) 條件二,當列車速度較大且加/減速度較小時,視列車在通過1個軌枕時速度為勻速,按中間間隔了1個傳感器的情況計算其平均速度。
2.2 冗余軌枕檢測優化算法
為了得到更為精確、可靠的列車速度及位置信息,本文在傳感器安裝上作了進一步的優化。在列車的車頭及車尾各安裝4個傳感器,將車頭的4個傳感器作為第1套測速定位設備,將車尾的4個傳感器作為第2套測速定位設備,則列車有2套測速定位設備,構成測速定位的冗余。將車頭編號為1,車尾編號為2,則列車在k時刻經過軌枕j時的平均運行速度為:
v0,k=w1,kv1,k+w2,kv2,k
(13)
式中:
v0,k——在k時刻采用2套測速定位設備采集得到的速度的加權平均值;
v1,k——在k時刻車頭定位設備的測速數據;
v2,k——在k時刻車尾測速定位設備的測速數據;
w1,k——在k時刻車頭測速數據的權值;
w2,k——在k時刻車尾測速數據的權值。
2.3 融合卡爾曼濾波的優化算法
列車大部分時間運行于勻加速或勻速狀態,因此可建立模型如下:
(14)
(15)
式中:
sk-1、sk——分別為k-1時刻、k時刻列車的預測位移值;
vk-1、vk——分別為k-1時刻、k時刻列車的預測速度值;
Sk——k時刻列車的觀測位移值;
T0——脈沖上升沿間隔時間;
a(k)——k時刻機動加速度和隨機加速度之和;
B(k)——k時刻觀測噪聲矩陣。

y1,k=(v1,k-vk)2
(16)
y2,k=(v2,k-vk)2
(17)
(18)
(19)
式中:
y1,k——k時刻車頭傳感器觀測值與預測值的差值;
y2,k——k時刻車尾傳感器觀測值與預測值的差值;
w1,k+1——k+1時刻車頭測速數據的權值;
w2,k+2——k+1時刻車尾測速數據的權值。
將w1,k+1、w2,k+1代入式(13),即可得到k+1時刻的速度觀測值的輸入。在計算y1,k和y2,k時,應根據經驗設定一個閾值,當某一測速定位設備在一定的時間段內所計算得到的差值有95%落在此閾值區間之外時,則可認為此設備發生了軟故障,將此套設備后面數據權值定為0。
整個測速定位算法的流程如圖2所示。
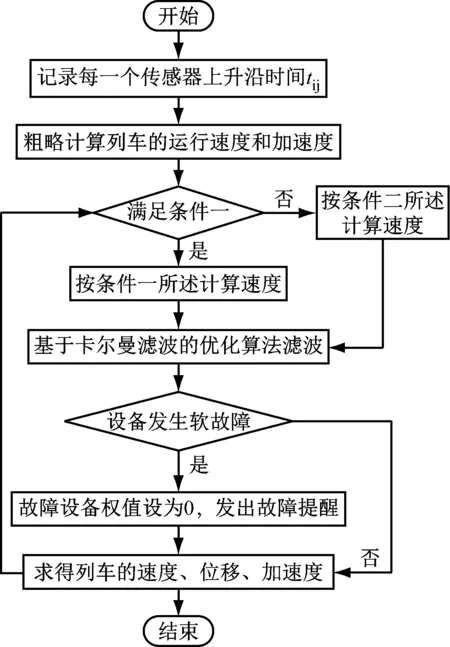
圖2 融合軌枕檢測和卡爾曼濾波的列車測速定位算法流程圖
3 算例驗證
3.1 仿真基礎數據
本次仿真基于上海臨港中低速磁浮試驗線,利用Matlab軟件進行仿真。假定該線的中低速磁浮列車以1.0 m/s2的加速度開始運行,10 s后列車的速度為10.0 m/s,此時列車勻速向前行駛,行駛至958.33 m后改為以1.2 m/s2的減速度繼續行駛,最終行駛到1 km處速度為0 m/s。
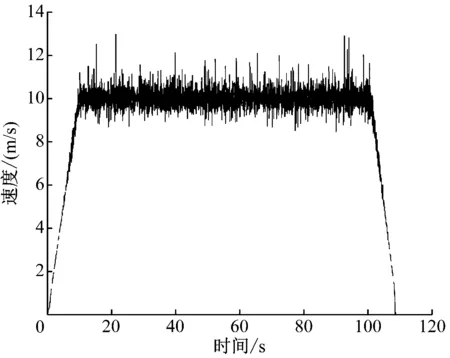
圖3 條件一下的監測數據仿真得到的列車速度-時間曲線
3.2 仿真結果分析
3.2.1 傳統軌枕檢測測速定位算法的仿真結果
由圖3可知,在列車以10 m/s勻速運行階段,其按條件一的計算方法,速度曲線波動較大。若用上述滿足條件二時的計算方法進行計算,可得到條件二下勻速運行階段的列車速度-時間曲線如圖4所示。
與圖3相比,圖4的曲線波動明顯減少。為證明此結論,本文對不同監測方法下的速度方差進行了計算:①條件一下計算得到的列車平均運行速度的方差為0.056 614 576;②條件二下計算得到的列車運行平均速度的方差為0.036 520 903。由此可得出如下結論:在傳感器間隔為0.3 m的情況下,由于渦流傳感器采樣存在誤差,其速度曲線波動大于間隔采樣下的波動,且間隔的傳感器越多,其速度方差越小。因此,在考慮了時間誤差對速度的影響及速度的準確性后,此算法是對原始算法的優化。
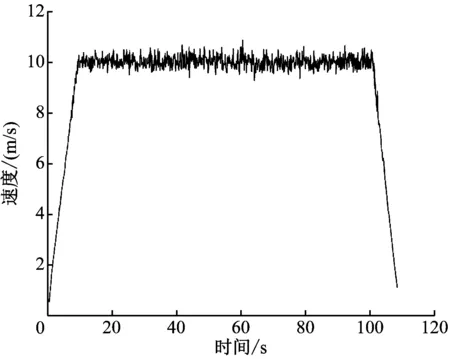
圖4 條件二下的監測數據仿真得到的列車速度-時間曲線
3.2.2 冗余測速定位算法的仿真結果
上文對監測數據在生成初始速度后已進行了優化。本文對該優化數據利用卡爾曼進行基礎濾波,結果如圖5所示。圖例中的“真實”表示列車在線路上運行時實際的列車速度-位移曲線;“觀測”表示條件二下仿真計算得到的觀測列車速度-位移曲線;“濾波(1組)”表示采用卡爾曼濾波對一套測速設備監測得到的觀測數據進行優化得到的列車位移-速度曲線。
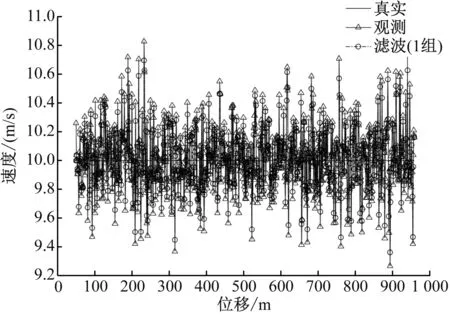
圖5 對一套測速裝置的監測數據進行卡爾曼基礎濾波后的列車位移-速度曲線
從圖5中可以看出,監測數據經過基礎濾波處理后有一定的濾波效果,其波動相較原始濾波有了一定程度的改善。為取得更好的監測效果,在已有第一套速度傳感器的基礎上,再引入第二套速度傳感器。按照上文融合卡爾曼濾波的優化算法將數據進行再次處理,結果如圖6所示。圖例中的“真實”、“觀測”的含義同圖5;“濾波(兩組)”表示采用卡爾曼濾波對兩套測速設備得到觀測數據進行優化得到的列車位移-速度曲線。
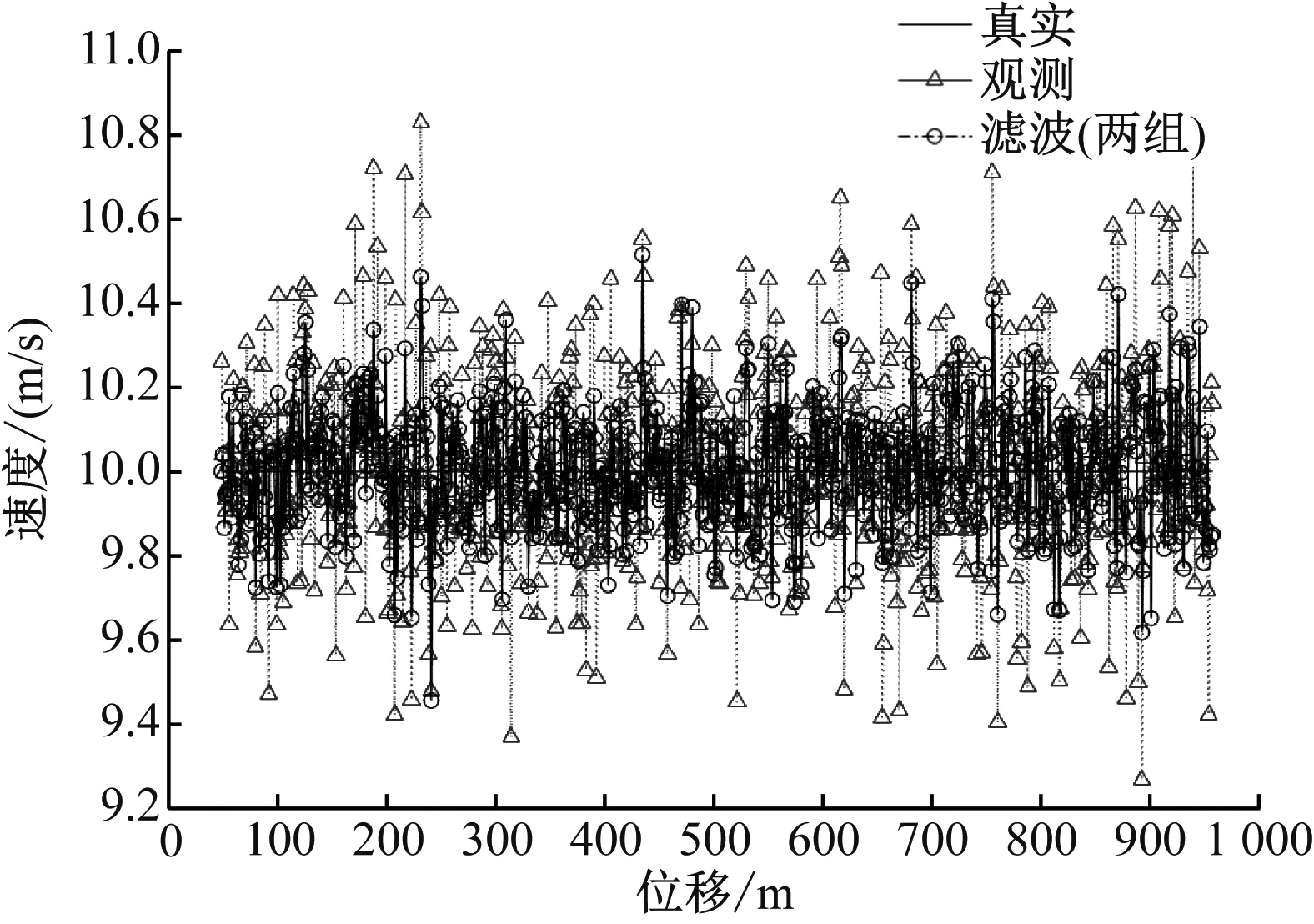
圖6 對兩套測速裝置的監測數據進行卡爾曼優化后的列車位移-速度曲線
從圖5~6可以看出,與使用一套測速設備得到的監測數據相比,使用兩套測速設備得到的數據進行融合卡爾曼濾波優化后的數據有較大的提升。為證明與采樣一套測速設備的定位數據相比,采用兩套測速設備的定位效果更優,本文選取勻速運行采樣數據,計算采樣數據與原始數據差值的絕對值,分別生成位移誤差均方根的上下包絡線,如圖7所示。
從圖7可以看出,采用一套測速設備進行監測得到的速度、位移數據經卡爾曼濾波后,其速度、位移的精度要優于原始的速度、位移數據;采用兩套測速設備進行監測得到的速度、位移數據經優化后最優。這證明本文所研究的算法能有效優化速度、位移數據,可提高列車測速定位的精度,改善其測速定位效果。
4 結語
本文針對既有基于軌枕檢測測速定位方法的不足,提出采用兩套測速定位設備對列車的速度、位移數據進行采集,利用卡爾曼濾波自適應權值的方法,對列車的定位算法進行優化,并通過計算機仿真該優化算法的測速定位效果。仿真結果證明:

a) 上包絡線

b) 下包絡線圖7 列車位移-位移誤差均方根曲線包絡線對比
本文所提出的優化算法能有效改善列車振動、時鐘誤差等因素導致的速度計算誤差,顯著提高基于軌枕檢測的測速定位方法的可靠性及精確性。在此優化算法的基礎上,若添加其他輔助的測速定位設備(如應答器、測速雷達、加速度計等)[4],可為中低速磁浮列車的測速定位提供更為可靠且安全的測速定位功能。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
電子制作(2018年11期)2018-08-04 03:26:08
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
工業設計(2016年12期)2016-04-16 02:52:00
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
