基于“彩虹4”無人機海洋監測平臺的設計與驗證
2022-04-14 03:29:38朱振宇周乃恩賀少帥
海洋科學 2022年3期
朱振宇, 周乃恩, 賀少帥
基于“彩虹4”無人機海洋監測平臺的設計與驗證
朱振宇, 周乃恩, 賀少帥
(青島海洋科學與技術國家實驗室發展中心, 山東 青島 266235)
針對海洋監測中輕小型無人機抗風能力差、大范圍動態監測能力不足的問題, 本文以彩虹-4型中空長航時無人機為平臺進行了載荷安裝、電氣接口及電磁兼容性設計, 實現了光電吊艙、對海雷達、AIS多任務載荷的優化集成, 通過開展遠距離無人機通信、載荷數據與位姿信息實時同步回傳、數據處理等關鍵技術研究, 形成了一套完整的海洋監測平臺軟硬件系統。最后經過長時間的地面測試并在海南三亞市東部海域開展遠距離飛行試驗, 依據應用場景及作業的緊迫程度, 探索了海島礁成圖等常規監測和海上船只目標應急監測應用模式, 驗證了平臺設計指標, 其中平臺續航能力優于22 h, 作業通訊距離達到2 300 km, 在無控條件下可見光、紅外、SAR成像精度分別為15.35 m、21.09 m、6.30 m。結果表明, 該平臺能夠滿足海洋監測技術要求, 具有實際應用價值。
中空長航時; 無人機; 海洋監測平臺; 多任務載荷; 集成設計
中國是一個毗鄰太平洋的海洋大國, 海域廣袤、海岸線漫長、島嶼眾多, 海洋對于國家經濟社會、生態環境和國防建設具有重要的戰略意義。國家“十三五”規劃中明確提出, 要統籌規劃國家海洋觀(監)測網布局, 推進國家海洋環境實時在線監控系統和海外觀(監)測系統建設, 逐步形成全球海洋立體觀監測系統[1]。目前中國已經構建了由衛星、飛機、車輛、船舶、岸基、島基、油氣平臺基、浮標、海床基等多元監測平臺組成的海洋立體監視監測體系, 可開展全方位、多尺度、長時效的監視監測, 保障海洋生態環境和安全。無人機(unmanned aerial vehicle, UAV)作為一種高分辨率遙感數據獲取以及海域實時動態監測平臺, 以其靈活、高效的特點成為了海洋立體監視監測體系的重要組成部分。世界上不少國家都非常重視無人機在海洋監測中的應用, 早在2002年美國就將“捕食者”、“全球鷹”等大型無人機投入海洋應用科學研究中, 搭載光電吊艙、對海雷達的“全球鷹”無人機系統已成為美國國家航空航天局(National Aeronautics and Space Administration, NASA)對美國海岸線巡查的常規機型; 在歐洲改進型的“全球鷹”也頻繁出現在各國海域, 其應用相對成熟; 2019年希臘海岸警衛隊測試了美國通用原子能公司“海上守衛者”MQ-9無人機的海上監視能力, MQ-9搭載多模式海上搜索雷達和高清/全運動視頻光學和紅外傳感器, 海面搜索雷達系統可開展海上目標連續跟蹤, 并將自動識別系統(automatic identification system, AIS)發射器與雷達檢測相關聯, 其逆合成孔徑雷達(inverse synthetic aperture radar, ISAR)模式有助于識別和分類超出光學傳感器探測范圍的艦船, 高清/全運動視頻光學和紅外傳感器可對飛機周圍的大型和小型水面艦船進行360°的遠距離全天候實時檢測和識別; 2020年日本海上保安廳為了引進大型無人機作為海洋監測平臺進行了試驗, 試驗機型為“海上守衛者”(MQ-9B)無人機, 機身全長11.7 m, 翼展24.0 m, 續航時間最多35 h, 搭載光電吊艙和對海雷達, 通過衛星傳輸系統即可遠程操控無人機和實時回傳監測數據, 其作業半徑能覆蓋日本的專屬經濟區。與國外相比, 我國的無人機技術發展較為成熟, 尤其是輕小型無人機在各個領域都廣泛應用, 不少單位和學者利用無人機在海域使用動態監管[2-3]、海洋災害監視監測[4-8]、海島礁測繪[9-11]、突發事件(溢油、危化品)應急監測[12]等方面開展技術研究與應用示范。上述研究大多數采用的是小型無人機, 其抗風能力無法有效應對海洋復雜多變的氣象條件[13], 遠距離測控和大數據量信息傳輸制約大范圍實時動態監測的開展[14], 載荷量和飛機尺寸限制了多種類型傳感器協同工作的可能性。近年來, 隨著軍民融合發展戰略的持續推進, 以“彩虹”“翼龍”為代表的中空長航時大型無人機開始在民用領域嶄露頭角, 2015年中國航天科技集團公司十一院在山東省煙臺市沿海地區成功實施了“藍色海鷗”“彩虹-4”無人機海洋示范應用, 是我國首次大型中空長航時無人機系統海洋示范應用; 2020年中國氣象局采用騰盾科技公司的大型雙發長航時“雙尾蝎”無人機攜帶氣象雷達、激光測風雷達、光電偵察吊艙和溫濕壓探測器等多種氣象探測設備, 實施了臺風海上觀測作業, 達到預先設定目標。通過國內外無人機海洋監測平臺對比可以發現, 國外在大型無人機多載荷集成的海洋監測應用較為成熟, 而我國基于輕小型無人機的海洋監測研究較為普遍, 只有近幾年基于大型無人機的海洋監測平臺應用才有公開報道。
針對海洋監測應用需求, 本文依托“海洋高端裝備技術創新工程”專項, 以“彩虹-4型”(CH-4)無人機為平臺研究光電吊艙、合成孔徑雷達(synthetic aperture radar, SAR)、船舶自動識別系統等多任務載荷優化集成、遠距離無人機實時監管及載荷數據實時回傳、監測數據與位姿數據同步打包下傳等關鍵技術, 通過在海南三亞市東部海域開展飛行實驗, 探索海洋監測常規任務和應急任務應用模式, 驗證了平臺集成方法的可行性以及平臺功能性能指標, 可為我國開展中空長航時無人機海洋監測工程化應用提供新的解決方案。
1 平臺總體設計
海洋監測平臺對無人機系統有較高的要求, 通常要滿足“飛得到”“看得見”“飛得好”等基本條件。“飛得到、飛得好”是前提, 即飛機的續航時間要滿足工作要求, 以遠海島礁測圖為例, 一般要求無人機作業半徑在1 000 km以上, 往返作業里程2 000 km以上, 續航時間要求不低于20 h, 同時在保證飛行安全的前提下, 盡可能獲取質量較好的監測數據成果。“看得見”是關鍵, 即在海洋監測過程中, 地面指揮中心能實時監控無人機飛行狀態, 載荷數據能實時回傳地面。基于上述技術要求和項目設計目標, 選用CH-4型中空長航時無人機, 搭載對海雷達、光電吊艙、船舶自動識別系統等任務載荷, 并通過遙控遙測鏈路實時接收地面指揮艙指令, 控制任務載荷開展海上目標識別、跟蹤, 海島礁測繪成圖等監測任務, 同時載荷數據又可通過遙控遙測鏈路實時回傳地面, 為指揮決策提供數據支撐。海洋監測平臺主要包括無人機、任務載荷集成模塊、遙控遙測鏈路模塊、任務規劃與數據處理模塊等, 總體設計框架圖如圖1所示。針對不同海洋監測任務需求, 系統需要根據任務規劃軟件設計相應航線, 引導無人機系統執行相關任務, 此時載荷設備可根據任務需求獲取不同類型數據。船舶自動識別系統輔助對海雷達開展目標搜索、跟蹤, 雷達方位坐標信息引導光電吊艙聯動, 對目標信息進行查證分析, 并將相關數據實時回傳地面; 在對海島、灘涂等固定目標進行常規監測時, 可利用光電吊艙、雷達分別獲取目標區域不同時序的正射影像、SAR成像圖等測繪成果數據, 為下一步開展目標區域動態變化監測提供基礎數據。
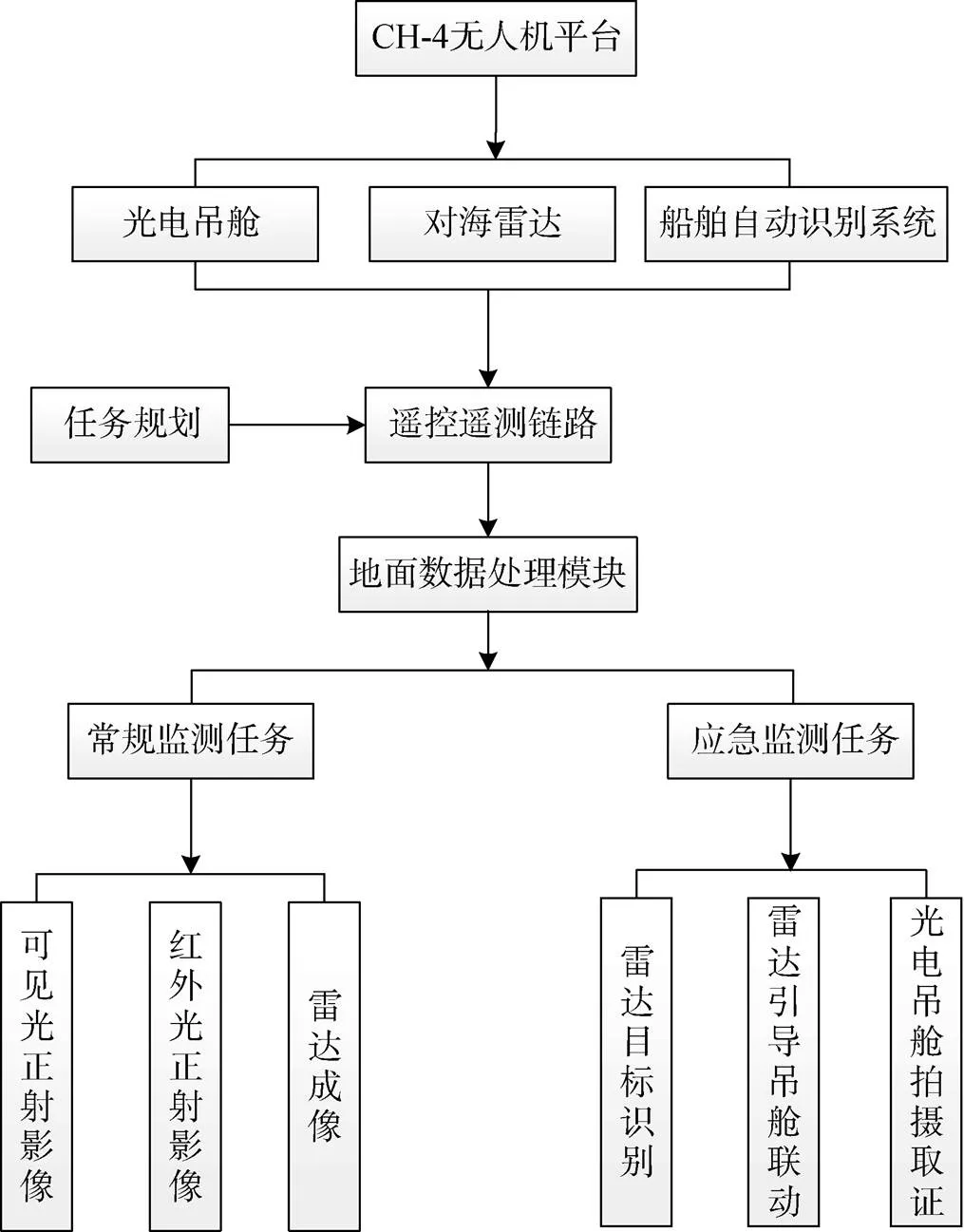
圖1 總體設計框架圖
2 平臺硬件設計與集成
2.1 無人機簡介
CH-4無人機是中國航天空氣動力技術研究院在“彩虹-3”無人機基礎上研發的一種中空長航時無人機, 目前在應急測繪[15]、航空物探[16]、海事監管[17]等領域, 以CH-4無人機為平臺進行的系統集成設計應用, 均取得了較好的效果。CH-4無人機機長8.5 m, 高3.4 m, 翼展18 m, 最大起飛質量1 330 kg, 載荷100 kg以下情況下可連續飛行30 h以上, 滿載345 kg情況下可飛行12 h, 具有裝載能力強、留空時間長、使用半徑大、可擴展性強等特點, 能夠滿足海洋監測無人機“飛得到”技術要求, 其主要性能指標如下表1所示。通過CH-4無人機性能指標可知, 與一般小型無人機相比, 其作業半徑更大, 在同等載荷條件下續航能力更強。除此之外, 可擴展性強也是CH-4無人機的一大優勢, 目前在已公開的民用項目中, 其已集成了光學面陣相機、高光譜/多光譜傳感器、SAR、傾斜相機、雷達高度計、光泵磁力儀等, 結果表明CH-4無人機可兼容不同載荷的硬件接口及數據傳輸協議。

表1 CH-4型中空長航時無人機飛行平臺主要性能指標表
2.2 多任務載荷集成設計
結合任務規劃需求, 本平臺主要搭載對海多功能雷達、光電吊艙、船舶AIS三種載荷。機載對海雷達由中國電子科技集團公司第三十八研究所所研制, 設備型號為JY-201(X), 質量70 kg, 具備海面廣域搜索監測、運動目標監測、條帶式合成孔徑成像等功能, 其主要性能指標見表2。
光電吊艙采用北京星網宇達科技股份有限公司的SCA350型設備, 包括兩軸陀螺穩定平臺、可見光攝像機、紅外熱像儀、圖像存儲模塊、圖像跟蹤器等部件, 主要用于目標查證、跟蹤以及區域快速成圖等, 其內部集成有FPGA芯片, 可實時對視頻圖像增強處理, 解決由于霧霾、光照不均等因素造成的圖像降質問題, 且增加了便于觀瞄的輔助功能, 便于后續的目標識別與跟蹤, 其主要參數見表3。
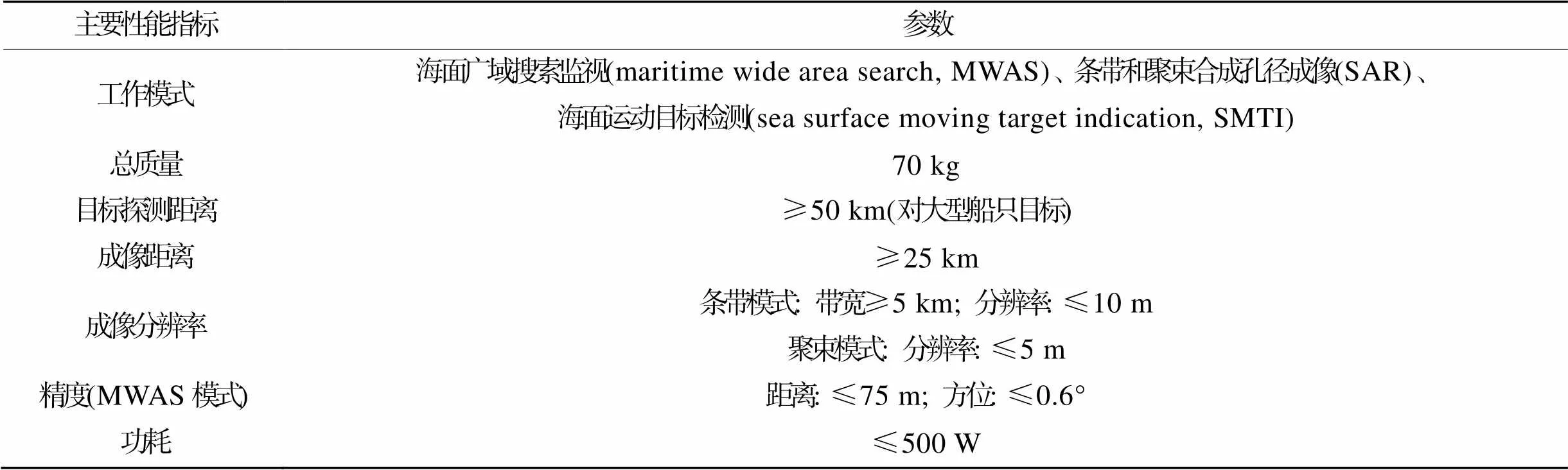
表2 JY-201(X)型對海雷達主要性能指標表
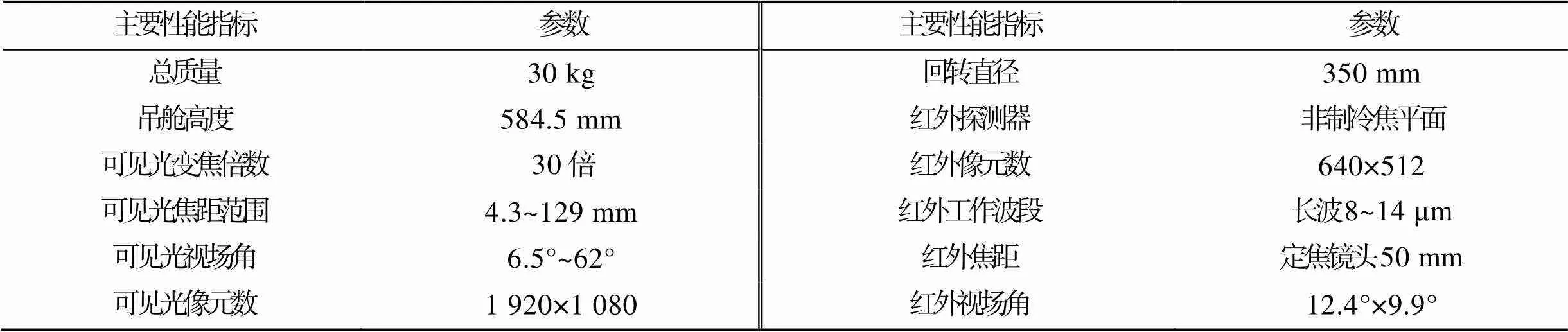
表3 SCA350-RB02型光電吊艙主要性能指標表
機載AIS用于接收海面船舶動/靜態相關信息, 提高無人機的對海偵察能力, 由機載超短波天線、AIS接收機及高頻電纜組成, 其工作頻段為108~ 174 MHz, 偵收頻點為161.975 MHz和162.025 MHz。在作業過程中AIS接收天線接收AIS電磁信號, 由AIS接收機解析AIS報文, AIS將收到的報文傳給飛管模塊, 再由飛管模塊發送給鏈路的收發組合單元, 然后下傳到指揮艙。在地面指揮艙內的AIS海圖顯示軟件上可顯示船只的位置、航向、航速等信息, 同時也可以顯示無人機的位置、速度等信息, 更加直觀的顯示無人機與目標船只的位置關系, 并通過對比發現關閉或未安裝AIS系統的可疑船只。
在不增加載荷質量的前提下, 優化載荷設備選型及集成設計, 滿足平臺續航時間、作業半徑及飛行安全要求。
1) 安裝設計
在監測數據采集時, 需同步獲取載荷的位置和姿態信息, 為了減輕載荷質量, 本文并未集成高精度的定位定姿系統(position and orientation system, POS), 而是利用飛機自身的組合慣導系統為載荷提供位姿信息, 因此在載荷安裝時必須剛性固聯于飛機平臺上, 以保證位姿信息的有效性, 不能借助運動補償穩定平臺。光電吊艙安裝時要求視場范圍內不受安裝結構件和飛機腹部蓋板的遮擋, 將其安裝在機腹最前方的位置; 根據對海雷達側視的作業模式, 將其天線安裝在機腹中部右側位置, AIS天線朝下安裝, 雷達及AIS功能模塊安裝在機腹內部, 安裝結構如圖2所示。
2) 電氣設計
為了保證機上供電安全, 在電氣設計時由CH-4無人機提供一個總的供電轉接頭, 通過電源轉接線

圖2 多任務載荷集成實物圖
分出3路分別給光電吊艙、對海雷達、AIS供電。供電轉接頭具有短路保護功能, 可在任務載荷發生意外故障、出現短路時自動切斷無人機對載荷系統的供電, 最大限度保護無人機的安全飛行。CH-4無人機供電單元對載荷的最大輸出功率為644 W, 本平臺中光電吊艙功耗為18 W, AIS功耗為10 W, 對海雷達功耗180 W, 總功耗為208 W, 遠遠小于CH-4的最大輸出功率。
3) 電磁兼容性設計
載荷功能模塊工作時往往處于復雜的電磁干擾環境中, 因此必須進行電磁兼容性設計, 本文采用接地、屏蔽、優化電纜走線等方式降低電磁干擾, 保證載荷設備和無人機系統正常兼容工作。對海雷達功率較大對飛機電磁干擾也較大, 在其機腹內部模塊覆蓋錫箔紙, 屏蔽內部輻射; 衛星通信大功率發射設備安裝在機頭前方, 遠離其他信號接收設備, 同時盡可能保證電源線與信號線不交叉。實物圖如圖3所示。
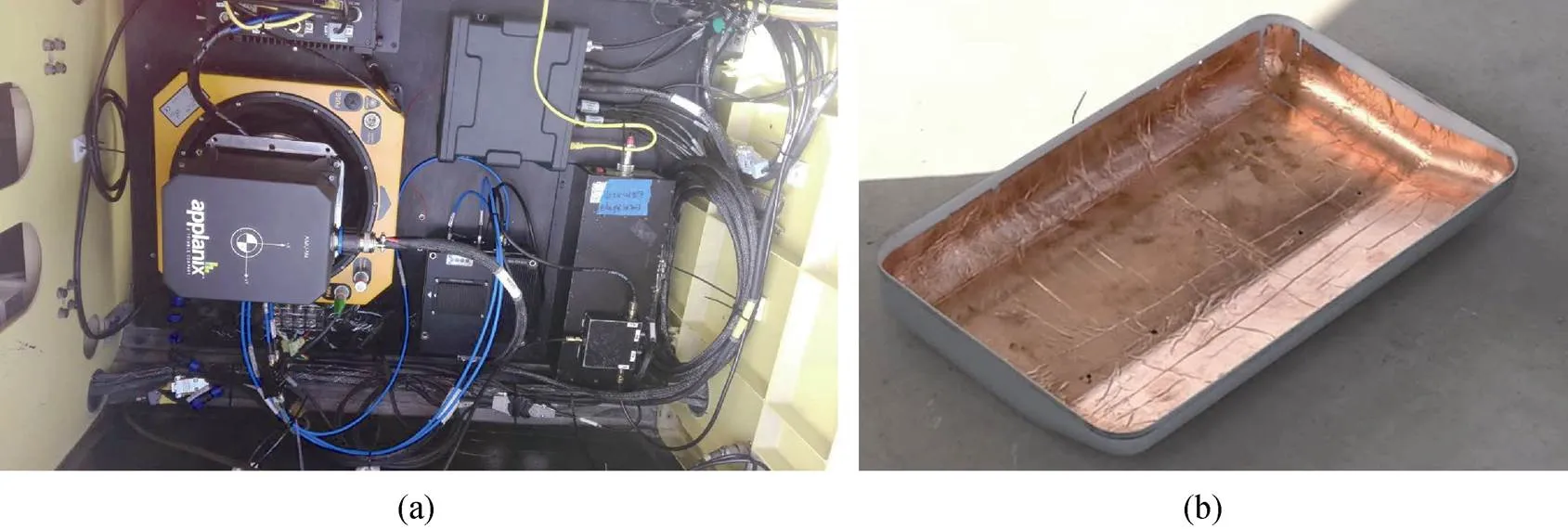
圖3 載荷電纜走線(a)、覆蓋有錫紙的內部載荷模塊安裝蓋(b)
2.3 遙控遙測鏈路設計
在海洋監測過程中, “看得見”是關鍵, 不僅要求地面指揮中心實時監控無人機飛行狀態, 還要能夠做到載荷數據的實時回傳。受限于載荷能力, 小型無人機通常只能搭載數傳電臺和圖傳電臺[18]實現無人機近距離的通信和數據傳輸, 而CH-4無人機可搭載衛星通信(以下簡稱衛通)設備實現遠距離通信。為了滿足載荷數據的實時大范圍傳輸需求, 本文設計了雙鏈路模式, 即同時搭載視距和衛通鏈路, 遙控遙測鏈路示意圖如下圖4所示。在通視條件下視距鏈路的最大測控距離為200 km, 是飛機與現場地面指揮艙的通信鏈路, 衛通鏈路可實現2 000 km以上的遠距離通信, 衛通地面接收站部署在海洋指揮中心, 可實現不同地點載荷數據的實時接收。

圖4 遙控遙測鏈路示意圖
衛通系統分為機載端和地面端, 其中機載端包括機載動中通天線、機載調制解調器、機載功放等; 地面端包括地面衛通天線、衛通業務調制解調器、數據處理終端、網絡交換機等, 其主要性能參數如表4所示, 實際安裝如圖5所示。為了將載荷數據打包下傳, 專門設計了數據采集板卡, 該板卡同時接入載荷設備接口和慣導接口, 利用慣導脈沖信號為載荷數據記錄時間標識, 從根本上消除無線傳輸延時帶來的誤差, 優化載荷數據與位姿信息的時間同步精度。

表4 衛星通信系統主要性能指標表

圖5 機載動中通天線安裝實物圖
2.4 載荷通信接口設計
在無人機對海監測過程中要求地面指揮艙能實時監控無人機的飛行狀況, 無人機能向地面指揮系統實時回傳載荷和飛行數據, 地面指揮系統也可根據需要向無人機發送指令來控制飛行和載荷作業。多任務載荷通信接口包括向光電吊艙、對海雷達、AIS等載荷設備發送控制指令的上行鏈路接口和接收三種載荷作業數據以及飛控信息的下行鏈路接口。上行鏈路通信采用一對一模式, 即視距和衛通鏈路地面指揮站各自只有一個端口能上傳指令, 為了安全起見, 還各自設計了一個備用端口。用于數據實時回傳的下行鏈路采用一對多模式, 即一個載荷數據可通過組播形式分發給多個地址接收, 這樣就可以滿足不同設備同時接收數據的需求。另外為了實現載荷數據與遙測數據的同步下傳, 在機載端需要對載荷數據和遙測數據同步打包下傳, 用自定義標識符加以區分, 在地面接收端通過解析每包數據的標識符分離載荷數據與遙測數據[19], 消除回傳數據時間不同步為后續數據處理帶來位置偏差, 機上載荷通信接口設計如圖6所示。
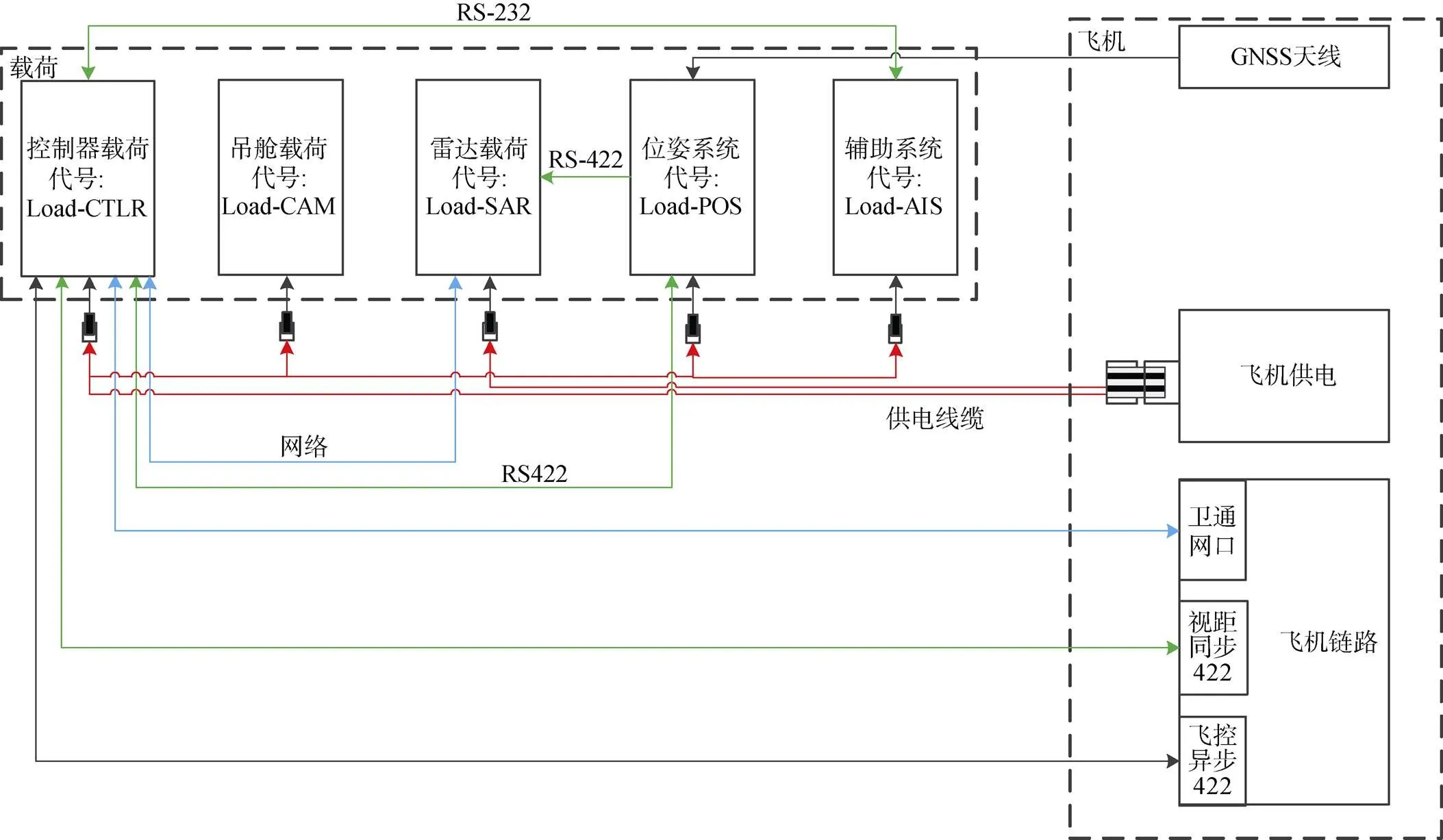
圖6 機上載荷通信接口設計圖
3 軟件模塊
地面指揮艙主要集成了無人機飛行監控、任務規劃與數據處理兩大軟件系統, 飛行監控系統主要用于無人機飛行控制及飛行狀態監管, 任務規劃與數據處理系統用于海洋監測任務規劃、載荷數據接收與處理、多源監測信息顯示、數據成果存儲管理等。
3.1 任務規劃
海洋監測任務一般分為常規監測任務和應急監測任務[20]。常規監測任務主要包括用海規劃、海岸線及沿海灘涂監測等。這類任務所需數據通常為正射影像、視頻數據等, 其任務規劃可采用航攝設計方案獲取滿足旁向重疊度要求[21]的可見光視頻數據, 最終提取關鍵幀拼接為整體影像。應急監測任務針對突發緊急事件, 需要快速作出響應。這類任務需要將現場畫面以視頻、圖像形式實時回傳指揮中心或利用雷達對目標進行搜索跟蹤, 其任務規劃沒有明確方案, 需要根據現場情況實時修改航線或根據監測目標航向實時修正自身航線。任務規劃是海洋監測平臺“飛得好”的前提, CH-4飛行控制軟件可以實時規劃飛行航線, 但其無法進行航空攝影測量的航線設計, 因此本文在此基礎上結合航線設計算法[22]二次開發實現基于數字高程模型的無人機航線自適應設計。
3.2 數據處理
通過光電吊艙載荷接口下傳的數據流中不僅包括可見光、紅外視頻碼流, 還包括同一時刻獲取的遙測數據, 軟件系統根據數據包幀頭的標識符區分可見光、紅外和遙測數據, 其中視頻流通過解碼模塊獲取每幀影像, 遙測數據根據飛控解析協議得到位置和姿態信息, 最后通過視頻流地理編碼[23]技術建立每幀影像與位姿數據的一一映射關系, 為視頻幀正射糾正及拼接處理提供地理參考。在拼接之前, 由于視頻冗余度較高, 需要對視頻進行抽幀處理, 提取滿足重疊度的視頻幀參與拼接, 這些視頻幀稱為關鍵幀, 關鍵幀的提取采用固定重疊度方法進行, 即每幀關鍵幀都滿足一定的重疊度要求, 相鄰視頻幀之間的航向重疊度可采用式(1)計算:
其中,為相鄰視頻幀中心點之間的地面距離, 可通過定位定姿信息中的坐標計算;為傳感器焦距;、w分別是視頻幀航向像素個數和像素物理尺寸;為視頻幀獲取時刻的相對航高。按照上述算法可獲取滿足重疊度要求的視頻關鍵幀, 下一步利用Photo-Scan軟件對其進行拼接處理, 獲取目標區域整幅影像。
對海雷達將鎖定目標的距離、方位、速度等信息實時回傳地面, 軟件系統利用雷達引導視頻聯動算法[24]自動計算出目標在雷達-視頻聯動模型中對應的光電吊艙方位角和俯仰角, 通過上傳鏈路發送控制指令, 引導光電吊艙鎖定目標, 實現目標的實時復核。利用對海雷達設備廠商提供的數據處理軟件實現條帶和聚束兩種模式下SAR成像處理, 包括單景單極化與全極化圖像的幾何校正以及多景圖像的校正、拼接、地理編碼等。任務規劃與數據處理系統的作業流程, 如圖7所示。
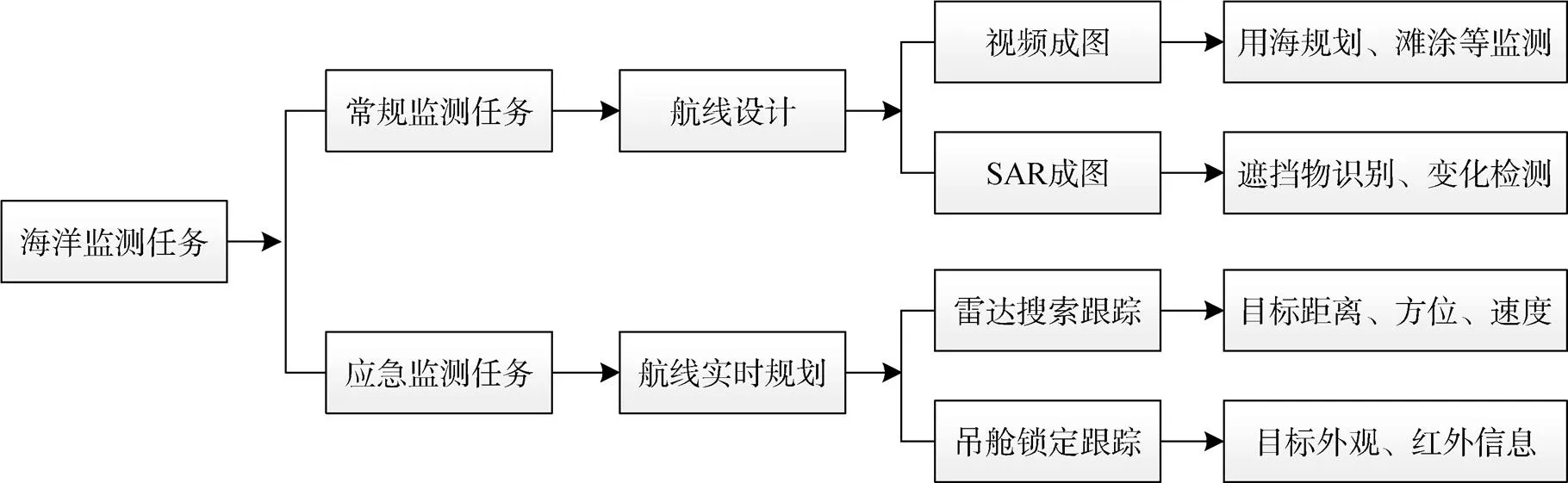
圖7 任務規劃與數據處理流程
4 試驗驗證
4.1 地面測試
載荷集成之后, 需要開展地面聯調測試, 主要測試電磁兼容性、載荷工作狀態、鏈路通信情況等, 首先進行地面通電測試, 各項指標通過后再開展地面著車測試。地面通電測試是由外接電源對飛機進行供電, 測試載荷全狀態工作條件下是否會相互干擾、鏈路通信是否正常, 本平臺進行了48 h不間斷供電測試, 期間未發生載荷故障, 數據傳輸正常無間斷。之后又進行了地面著車測試, 測試發動機抖動對載荷設備的影響以及載荷供電穩定性, 經過長達12 h的著車測試驗證了載荷集成的可靠性, 滿足飛行測試要求。
4.2 飛行測試
4.2.1 試驗區概況
為了驗證該平臺作業半徑、續航能力以及載荷作業性能指標等, 本文開展了飛行試驗, 試驗區位于海南省三亞市東部海域, 東起分界洲島海域, 西至蜈支洲島海域, 東西長107 km, 南北寬70 km, 測區包括分界洲島、蜈支洲島等海島, 海岸線灘涂、人工建筑設施等。
4.2.2 航線設計
常規監測任務包括分界洲島可見光/紅外視頻成圖、條帶模式下的海岸帶SAR成圖。光電吊艙可見光為變焦鏡頭, 焦距范圍為4.3~129 mm, 設計地面分辨率為0.5 m, 旁向重疊度為35%, 根據攝影比例尺公式反算焦距為11.5 mm, 因此在飛行作業中需要將可見光焦距鎖定為11.5 mm。紅外鏡頭為定焦鏡頭, 焦距為30 mm, 成像單元物理尺寸為18 μm, 設計地面分辨率為0.5 m, 旁向重疊度35%, 按照航攝比例尺式(2)計算航高為820 m, 共敷設11條航線。

式中,為焦距,為成像單元物理尺寸,為地面分辨率,為設計航高。
由于對海雷達天線與垂直方向的夾角為85°~ 88°, 為了滿足水平探測距離為50 km的要求, 根據三角函數計算飛行航高在2 620~4 374 m, 而作業區域的空域管控為3 500 m以下, 因此在SAR條帶成像模式, 本文設計定高3 000 m飛行, 采用右側式作業方式。具體航線設計如圖8所示。

圖8 常規監測任務光電吊艙航線設計
應急監測任務模擬飛機從某機場起飛到目標海域開展船只搜索、識別、查證與跟蹤等, 其航線設計為從機場到目標海域為固定航線, 到達目標海域后進行大半徑繞飛, 操控對海雷達搜索目標船只, 鎖定跟蹤。應急監測實際飛行航跡如圖9所示。藍色軌跡為指揮艙在飛行前規劃的輔助飛行航線, 紅色為實際作業飛行航跡, 包括紅色矩形框的繞飛航跡和長條狀折返航跡。

圖9 應急監測實時規劃航跡結果
4.2.3 試驗結果
視距指揮艙部署在三亞市某機場, 距離試驗區最遠距離190 km, 衛通便攜式地面站部署在青島海洋實驗室, 距離試驗區2 300 km, 在整個試驗過程中, 地面接收站與飛機之間通訊正常, 無中斷, 光電吊艙獲取的視頻數據實時回傳地面。任務規劃航時約4.5 h, 為了驗證平臺續航能力, 在完成任務規劃航線繼續在試驗區繞飛, 總載荷質量為137 kg, 理論續航25 h, 實際飛行22 h后安全降落。通過試驗結果可知, 該海洋監測平臺的作業半徑、續航能力、通信距離均滿足設計指標要求, 平臺實際飛行及數據回傳地面指揮艙如圖10所示。圖10a為CH-4無人機起飛和降落時的畫面, 圖10b為指揮艙內載荷監控席位實時畫面, 其中最上方屏幕為AIS實時畫面, 中間屏幕為光電吊艙紅外模式目標鎖定跟蹤實時畫面。
針對常規監測任務獲取的分界洲島可見光、紅外視頻數據及其對應的遙測數據, 開展遙測數據解析、紅外視頻增強、視頻關鍵幀提取、視頻地理編碼、關鍵幀拼接等處理, 得到分界洲島可見光及紅外

圖10 CH-4無人機實際飛行作業圖(a)及實時回傳軟件界面(b)
視頻拼接全圖, 如圖11所示。由處理結果可以看出, 分界洲島全貌可見光和紅外視頻影像獲取清晰, 由于沒有在地面布設控制點, 選擇借助國家地理信息公共服務平臺天地圖衛星遙感影像數據評估成果精度。首先將拼接成果疊加在三維地理信息平臺中, 以天地圖衛星遙感影像地圖為基準, 均勻選取同名地物點進行平面距離量測, 分析其中誤差, 統計數據如表5所示。
在無控制條件下可見光拼接影像, 如下圖11所示, 其相對坐標中誤差為15.35 m, 紅外拼接影像相對中誤差為21.09 m。

圖11 分界洲島可見光(a)、紅外(b)視頻拼接效果
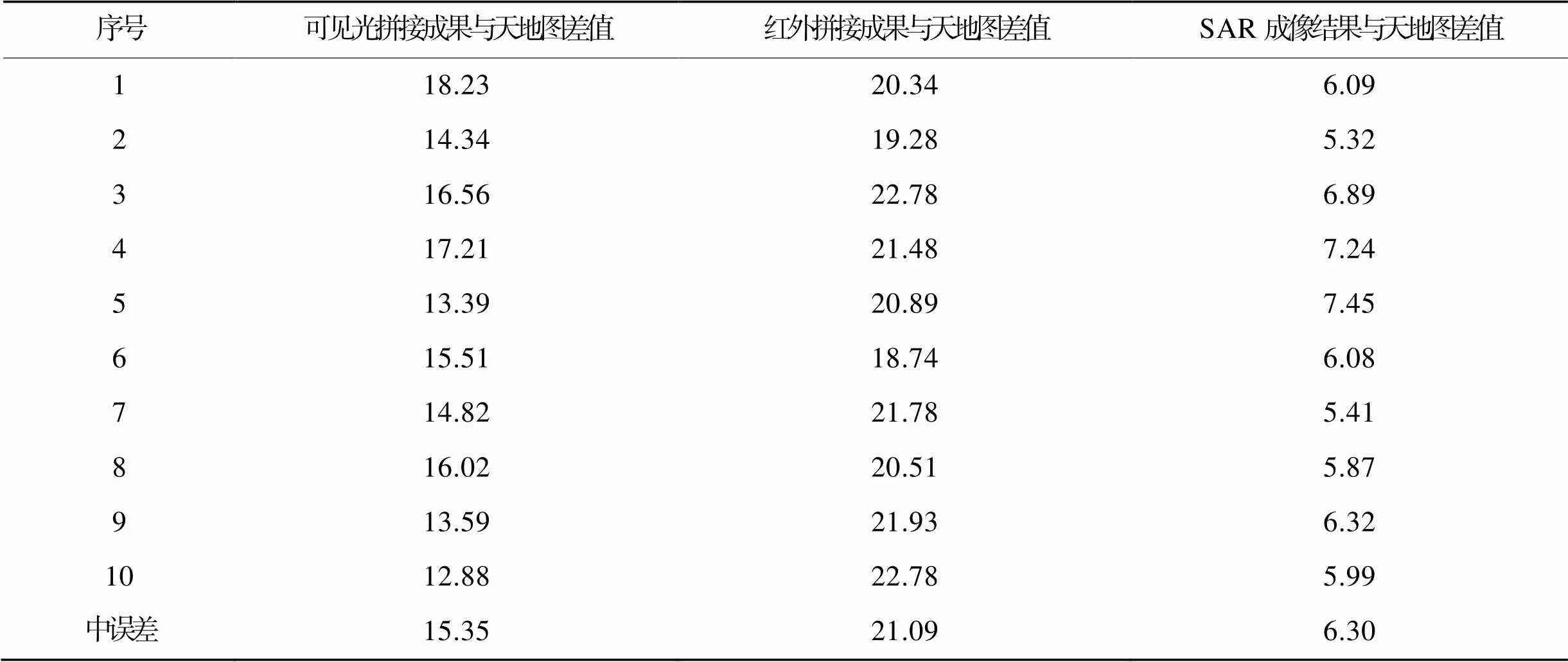
表5 試驗成果數據精度統計表(單位: m)
對海雷達條帶成像模式對海岸線目標區域進行探測, 獲取SAR數據, 經過輻射校正、地理編碼、幾何糾正、拼接等處理得到目標區域SAR成像結果, 部分成果及局部放大圖如下圖12所示, SAR成像清晰無噪點, 條帶寬度滿足設計指標要求, 坐標相對中誤差為6.30 m。

圖12 對海雷達條帶模式下成像結果
通過試驗結果可知, 常規監測任務獲取的分界洲島可見光及紅外視頻、沿海灘涂SAR成像數據質量合格, 且在無控制點條件下拼接結果坐標相對中誤差較小, 能夠用于下一步的海洋監測分析, 滿足“飛得好”技術要求。
在應急監測任務中, 開啟雷達對海跟蹤監視模式對目標區域進行探測, 獲取船只的距離、方位、速度、航向等信息, 飛機朝目標船只方向飛行, 對海雷達跟蹤目標并將獲取信息實時回傳地面。軟件系統實時計算目標在雷達-視頻聯動模型中對應的光電吊艙方位角和俯仰角, 進而引導光電吊艙鎖定目標船只, 拍攝取證, 監測結果如圖13所示, 從圖中可以看出對海雷達(圖13a)能夠同時跟蹤多個船只目標, 并顯示其方位、距離、航速等信息; 雷達-視頻聯動模式下, 光電吊艙可輕松鎖定目標船只(圖13b、圖13c), 便于拍攝取證; AIS可顯示目標船只與飛機位置關系, 輔助搜索跟蹤。
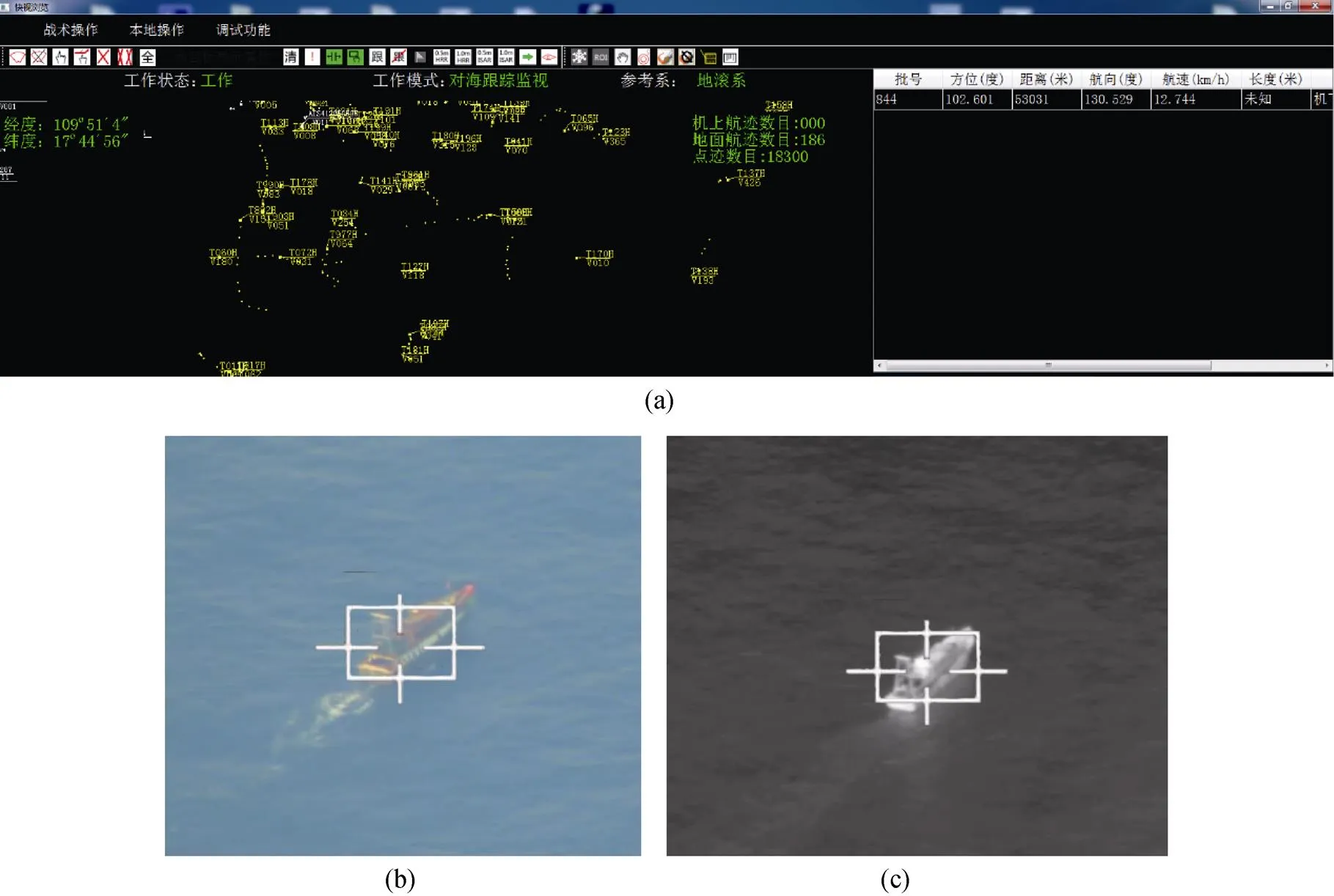
圖13 對海雷達條帶模式下成像結果
5 結論
圍繞海洋監測應用需求, 利用設計集成的海洋監測平臺開展多個監測任務試驗, 驗證了該平臺是解決海洋監測長航時、大范圍作業的有效技術裝備。
1) 針對海洋監測長航時指標要求, 優化載荷設備選型, 實現了多任務載荷的優化集成, 平臺續航時間大于22 h, 作業半徑為2 000 km, 從就近機場起飛, 能覆蓋中國大部分遠海島礁及海域。
2) 為了提高海洋監測過程無人機通信距離, 設計了視距與衛通雙鏈路模式, 根據作業距離自動切換鏈路, 實現了無人機遠距離全航程的是實時監管以及載荷數據的實時回傳。針對常規監測任務數據處理需求, 設計了載荷數據與位姿信息的同步打包下傳板卡, 實現了載荷數據的無控地理編碼處理。
3) 針對常規監測任務獲取了分界洲島可見光和紅外視頻數據, 并進行了地理編碼、拼接處理, 驗證了成圖精度, 在應急監測任務中對海雷達獲取了目標船只的距離、方位、速度、航向等信息, 雷達-視頻聯動模式下, 光電吊艙鎖定了目標船只, 用于拍攝取證。
在下一步研究工作中, 將繼續開展高光譜、激光雷達等多任務載荷協同監測研究, 為開展海洋環境污染監測應用做好技術準備, 同時還需進一步挖掘監測數據成果應用價值, 充分發揮CH-4無人機優勢,強化海洋立體監測體系。
[1] 云行.“十三五”規劃之海洋篇[J].衛星應用, 2016(6): 24-25.
[2] 王飛, 陳一鶴, 趙建華, 等.海域無人機全景監視監測技術及其應用[J].海洋開發與管理, 2019, 36(10): 65-68.
WANG Fei, CHEN Yihe, ZHAO Jianhua, et al.Panoramic surveillance and monitoring technology of unmanned aerial vehicle in sea area and its application[J].Ocean Development and Management, 2019, 36(10): 65-68.
[3] 雷伊娉, 李學恒, 雷靜, 等.基于無人機平臺的海域監管關鍵技術及其應用[J].海洋開發與管理, 2019, 36(12): 77-80.
LEI Yiping, LI Xueheng, LEI Jing, et al.The key tech-nologies of sea area supervision based on UAV platform and its application[J].Ocean Development and Management, 2019, 36(12): 77-80.
[4] 張永年.無人機低空遙感海洋監測應用探討[J].測繪與空間地理信息, 2013, 36(8): 143-145.
ZHANG Yongnian.Discussion on application of uav low-altituderemote sensing marine monitoring[J].Geo-matics & Spatial Info rmation Technology, 2013, 36(8): 143-145.
[5] 張元敏.無人機航測技術在入海排污口排查中的應用[J].測繪通報, 2020(1): 146-149, 153.
ZHANG Yuanmin.Application of UAV aerial survey technology in sewage outlet investigation[J].Bulletin of Surveying and Mapping, 2020(1): 146-149, 153.
[6] 高興國, 田梓文, 麻德明, 等.無人機LiDAR系統在砂質海岸監測中的應用[J].海洋環境科學, 2020, 39(3): 468-472.
GAO Xingguo, TIAN Zhiwen, MA Deming, et al.Application of UAV LiDAR system in sandy coast monitoring[J].Marine Environmental Science, 2020, 39(3): 468-472.
[7] SHI Z H, YU L, CAO D S, et al.Airborne ultraviolet imaging system for oil slick surveillance: oil-seawater contrast, imaging concept, signal-to-noise ratio, optical design, and optomechanical model[J].Applied Optics, 2015, 54(25): 7648-7655.
[8] NUNZIATA F, GAMBARDELLA A, MIGLIACCIO M.On the degree of polarization for SAR sea oil slick observation[J].ISPRS Journal of Photogrammetry & Remote Sensing, 2013, 78(4): 41-49.
[9] 劉森波, 周興華, 林旭波, 等.無人機航攝系統在海岸帶大比例尺測圖中的應用[J].測繪通報, 2017(9): 156-158.
LIU Senbo, ZHOU Xinghua, LIN Xuebo, et al.Application of UAV aerial camera system in large-scale surveying and mapping of coastal zone[J].Bulletin of Sur-veying and Mapping, 2017(9): 156-158.
[10] 畢凱, 丁曉波.輕小型無人機遠海島礁航測關鍵技術研究[J].海洋技術學報, 2020, 39(6): 8-16.
BI Kai, DING Xiaobo.Research on the key technology of aerial photogrammetry for islands or reefs far from the mainland based on light and small UAV[J].Journal of Ocean Technology, 2020, 39(6): 8-16.
[11] 張凱, 張好運, 盧旭升, 等.無人機海島礁航空攝影測量技術應用[J].測繪通報, 2018(9): 87-90.
ZHANG Kai, ZHANG Haoyun, LU Xusheng, et al.App-lication of unmanned aerial vehicle aerial photogrammetry in island[J].Bulletin of Surveying and Mapping, 2018(9): 87-90.
[12] 任廣波, 過杰, 馬毅, 等.海面溢油無人機高光譜遙感檢測與厚度估算方法[J].海洋學報, 2019, 41(5): 146-158.
REN Guangbo, GUO Jie, MA Yi, et al.Oil spill detection and slick thickness measurement via UAV Hyperspectral Imaging[J].Haiyang Xuebao, 2019, 41(5): 146-158.
[13] 楊曉彤, 郭燦文, 邢喆, 等.無人機海洋測繪應用進展與展望[J].海洋信息, 2019, 34(3): 12-17.
YANG Xiaotong, GUO Canwen, XING Zhe, et al.Progresses and perspectives of marine surveying and mapping based on UAV[J].Marine Information, 2019, 34(3): 12-17.
[14] 黃天進.無人機海洋測繪應用進展與展望[J].船舶物資與市場, 2020(7): 8-9.
HUANG Tianjin.Progresses and perspectives of marine surveying and mapping based on UAV[J].Marine Equipment/Materials & Marketing, 2020(7): 8-9.
[15] 周興霞, 黃青倫, 武昊.四川中航時固定翼無人機航空應急測繪系統總體技術設計與集成驗證[J].測繪, 2019, 42(13): 105-108.
ZHOU Xingxia, HUANG Qinglun, WU Hao.The ove-rall design and integrated verification of sichuan medium-duration fixed-wing UAS for emergency surveying and mapping[J].Surveying and Mapping, 2019, 42(13): 105-108.
[16] 鞠星, 韓松, 郭華, 等.彩虹4無人機在航空物探領域的安全應用[J].中國礦業, 2020, 29(S2): 159-162.
JU Xing, HAN Song, GUO Hua, et al.The safe application of CH-4 unmaneed aerial vehicle in aero geophysics[J].China Mining Magazine, 2020, 29(S2): 159-162.
[17] 閆東, 周乃恩.彩虹無人機系列應用及展望[J].軟件, 2018, 39(9): 117-122.
YAN Dong, ZHOU Naien.The applications and prospects of CH UAV Systems[J].Computer Engineering & Software, 2018, 39(9): 117-122.
[18] 張繼賢, 劉飛, 王堅.輕小型無人機測繪遙感系統研究進展[J].遙感學報, 2021, 25(3): 708-724.
ZHANG Jixian, LIU Fei, WANG Jian.Review of the light-weighted and small UAV system for aerial photography and remote sensing[J].National Remote Sensing Bulletin, 2021, 25(3): 708-724.
[19] 孫玉超, 曾紀勝, 田松, 等.面向海岸線修測的無人機照片視頻獲取及管理研究[J].海洋技術學報, 2020, 39(5): 13-18.
SUN Yuchao, ZENG Jisheng, TIAN Song, et al.Research on the acquisition and management of uav photos and videos for coastline survey[J].Journal of Ocean Technology, 2020, 39(5): 13-18.
[20] 趙雪, 王厚軍, 劉惠.海域無人機監視監測業務流程設計[J].海洋開發與管理, 2018, 35(3): 24-27.
ZHAO Xue, WANG Houjun, LIU Hui.Desigen of surveillance and monitoring business process for sea area unmanned air vehicle[J].Ocean Development and Ma-nagement, 2018, 35(3): 24-27.
[21] 張劍清, 潘勵, 王樹根.攝影測量學[M].武漢: 武漢大學出版社, 2009.
ZHANG Jianqing, PAN Li, WANG Shugen.Photogrammetry[M].Wuhan: Wuhan University Press, 2009.
[22] 柳忠偉, 程新文, 李英成, 等.利用DEM的自適應航線設計方法[J].測繪科學, 2014, 39(12): 143-147.
LIU Zhongwei, CHENG Xinwen, LI Yingcheng, et al.Adaptive strips design method based on DEM data[J].Science of Surveying and Mapping, 2014, 39(12): 143- 147.
[23] 孫新博.無人機視頻地理編碼系統設計與實現[D].北京: 中國測繪科學研究院, 2017.
SUN Xinbo.Design and Implementation of UAV video geographic coding system[D].Beijing: Chinese Aca-demy of Surveying and Mapping, 2017.
[24] 屈立成, 高芬芬, 柏超, 等.雷達引導的視頻聯動監控模型及算法[J].計算機應用, 2018, 38(12): 3625- 3630.
QU Licheng, GAO Fenfen, BAI Chao, et al.Radar- guided video linkage surveillance model and algori-thm[J].Journal of Computer Applications, 2018, 38(12): 3625-3630.
Design and verification of a marine monitoring system plat-form based on CH-4 UAV
ZHU Zhen-yu, ZHOU Nai-en, HE Shao-shuai
(Pilot National Laboratory for Science and Technology, Shandong University, Qingdao 266235, China)
medium altitude long endurance; unmanned aerial vehicle (UAV); marine monitoring platform; multi-task payload; integrated design
Based on the CH-4 medium-altitude long-endurance UAV, we designed the load installation, electrical interface, and electromagnetic compatibility, and realized the optimized integration of multitask loads such as a photoelectric pod, sea radar, and AIS.We formed a complete set of marine monitoring platform software and hardware systems through the research on key technologies such as developing long-distance UAV communication, the real-time synchronous return of load data with attitude information, and data processing.Finally, long-term ground tests and long-distance flight tests were conducted in the eastern waters of Sanya, Hainan, and conventional and emergency marine monitoring application modes were investigated based on the application scenario and urgency of the job to validate the platform’s design indicators.The platform endurance exceeded 22 h, the operating communication distance exceeded 2300 km, and the imaging accuracies of visible light, infrared, and SAR imaging under uncontrolled conditions were 15.35, 21.09, and 6.30 m, respectively.To summarize, the platform can meet the technical requirements of marine monitoring while also being useful in practice.
Aug.12, 2021
[Marine S&T Fund of Shandong Province for Pilot National Laboratory for Marine Science and Technology(Qingdao), No.2018SDKJ0203]
P715.7
A
1000-3096(2022)03-0122-13
10.11759/hykx20210812001
2021-08-12;
2021-10-28
山東省支持青島海洋科學與技術試點國家實驗室重大科技專項(2018SDKJ0203)
朱振宇(1985—), 男, 浙江臺州人, 碩士, 高級工程師, 主要從事無人機系統總體設計、無人機海洋監測應用研究, 電話: 15311815927, E-mail: ch_zhuzhenyu@163.com
(本文編輯: 叢培秀)
