城市軌道交通車輛與信號系統接口分析
2022-04-15 11:33:45馮光旭
交通科技與管理 2022年7期
馮光旭

摘要 信號系統作為控制車輛的重要構成,承載著保證駕駛過程中車輛安全以及提高運輸的效率的作用。研究城市軌道交通車輛與信號系統接口,促進城市軌道交通的運營優化。文章分析了當前信號系統與車輛接口上存在的問題,根據問題提出相關措施。對城市軌道交通車輛的信號系統接口分析,提供一些合理的建議。
關鍵詞 城市軌道交通;信號系統;接口
中圖分類號 U284 文獻標識碼 A 文章編號 2096-8949(2022)07-0011-03
0 引言
城市軌道交通是城市建設的重點,在城市的交通系統中承擔著重要的運輸責任。城市軌道交通的信號系統通常是由兩部分組成的,分別由列車運行的自動控制系統和車輛段信號系統組成。該文中重點研究的系統為自動控制系統的信號接口,為一些接口問題提出解決方案。
1 信號系統的全部組成以及實現的功能
列車運行的自動控制系統和車輛段信號系統共同組成了城市軌道的信號系統,兩個子系統彼此之間是相輔相成的,具體如圖1。
自動控制系統中包括自動防護列車和自動運行以及列車自動監控三個系統模塊,自動防護系統中包括聯鎖閉塞和超速防護;列車自動監控系統包括旅客向導、列車進路及間隔控制、運行信息處理、運行圖管理及電力車輛調整;列車自動模型系統包括定位停車、列車速度調整、自動折返;車輛段信號系統包括聯鎖、進路控制、維修管理、車輛調度[1]。列車自動防護系統的主要功能是對超速的時候進行防護,系統會對列車的允許運行速度和列車負載后實際的速度進行結合。讓其發揮最大的價值,并且一直在安全的情況下運行。當車輛的列車自動防護系統開啟后,一旦速度超過系統設定的數值,系統就會發出命令,讓列車自動制動。當列車自動防護系統檢測到列車的速度降到安全數值后,該模式就會自動緩解。列車自動防護系統還具備各種防護功能,例如,列車位置彼此的安全間隔、停車點以及速度的檢測;還有故障報警和在運行過程中速度的自我調節控制記錄司機的駕車操作等,以保證駕駛的全部行為安全。同時,還可以與列車自動運行系統和列車自動監控系統實行聯動與交換信息的功能。
列車自動運行系統的基礎概念為實現列車與車站位置定位自動停車的功能。列車自動運行系統的主要功能是監控列車和地面信息的驅動控制,包括對于列車的自動折返的過程。其中自動駕駛屬于列車自動運行系統的基本功能,可見其未來的潛力之深[2]。除此之外,列車自動運行系統還有著PTI系統支持和巡航等基礎服務功能。該系統能夠為乘客提供更加優質的乘車體驗以及乘車過程的精確度,在長途駕駛的過程中,避免出現工作人員駕駛疲勞的情況。
列車自動監控系統是一套集計算機科學拓撲學及數據通信于一身的綜合性系統模塊,通過所有模塊對于列車的運營和信號管理進行控制。列車自動監控系統詳細的功能是對于列車任何功能的絕對控制,以及在列車運行過程中所有行為的全程監督[3]。從而方便工作人員對車輛現狀的了解,對于車輛進行實時監控和管理。列車自動監控系統共分為兩個子模塊,分別是控制中心系統和集中控制站設備。列車自動監控系統的主要工作路徑為:從調度員工作站到調度長工作站對于列車進行檢測,經過FAS監測系統和SCAD監測系統進行數據檢測。最后再通過外接輸出設備將運行圖和時刻表進行輸出工作,與此同時值班員的控制臺也會收到信息。其中的功能有:在一定的區域內車輛的運行狀況的監控、在進路的過程中進行前路監控、對于列車之間的間隔情況進行實時反饋、對于出現的異常進行實時監控反饋以及自我優化調整、列車車次號碼的自動傳遞等。
2 信號系統與車輛之間關系和相關接口
在列車的運行過程中,接口能夠為車輛帶來實時監測的信息,幫助工作人員及時處理故障,減少故障排查花費的時間[4]。不但降低了車輛運行成本,還減少了在人力成本上不必要的浪費。車載信號與車輛系統擁有的接口,大致可以分為三種類型,分別是車輛電路為車載控制器提供的電源、車輛電路在車載控制器端的信號輸入、車載控制器給車輛電路的輸出命令。在地鐵的設計中地鐵列車一共存在七種模式,其中的OFF模式是為了VOBC和控制中心的通信狀態下準備的關閉模式;一旦啟動了這種模式,VOBC會開始執行緊急制動的命令。AUTO模式則與之相反,駕駛員只需要在車輛啟動時開啟就可以。PM模式則是一種自動駕駛模式,在VOBC的檢測下為汽車提供無人駕駛且全程對命令進行檢測。ATP反向模式,重點監測列車與站臺的距離,當列車離站臺過近的時候就會對列車進行退回的操作,讓列車重新保持與站臺的安全距離[5]。PM模式是一個檢測程序,當列車在人工駕駛的過程中會對于司機的命令進行全程監測。CUT-OUT模式下,VOBC模式就會徹底失靈。列車將不會自動發出任何命令,全程由駕駛員對列車進行把控。一旦VOBC模式出現故障,無法保證乘客的安全。CUT-OUT模式就會成為救命稻草一般的存在。在列車的運行的過程中,VOBC模式就會全程開啟對于各個模式的檢測,出現了任何一個模式的不回應,VOBC就會陷入故障模式發出警報。在列車自動防護系統加成的模式下,列車自身就可以實現控制列車的時速和完成智能折返作業。在列車自動監控系統開啟的狀態下,列車可以自由實現反復智能折返。在折返的過程中,信號系統車載設備牽引力、智能指令、針對路況的列車速度要求以及制動控制的裝置;這幾類功能模塊都會根據實際情況及時做出相應調整。信號系統車載設備會為列車的兩個車門設定專屬的釋放信號,分別是左門釋放和右門釋放。當出現了釋放的命令以后,車門只會接收到開門的命令,對于關門的指令會做出不執行的決定。在此功能的加持下,可以保證乘客的安全,避免意外事件。與此同時,信號系統車載設備也會給車輛提供緊急的制動信號。在緊急情況的道路上,如果出現失電的情況后可以自動發出緊急制動命令,讓車以最安全的狀態逐漸降速為零。
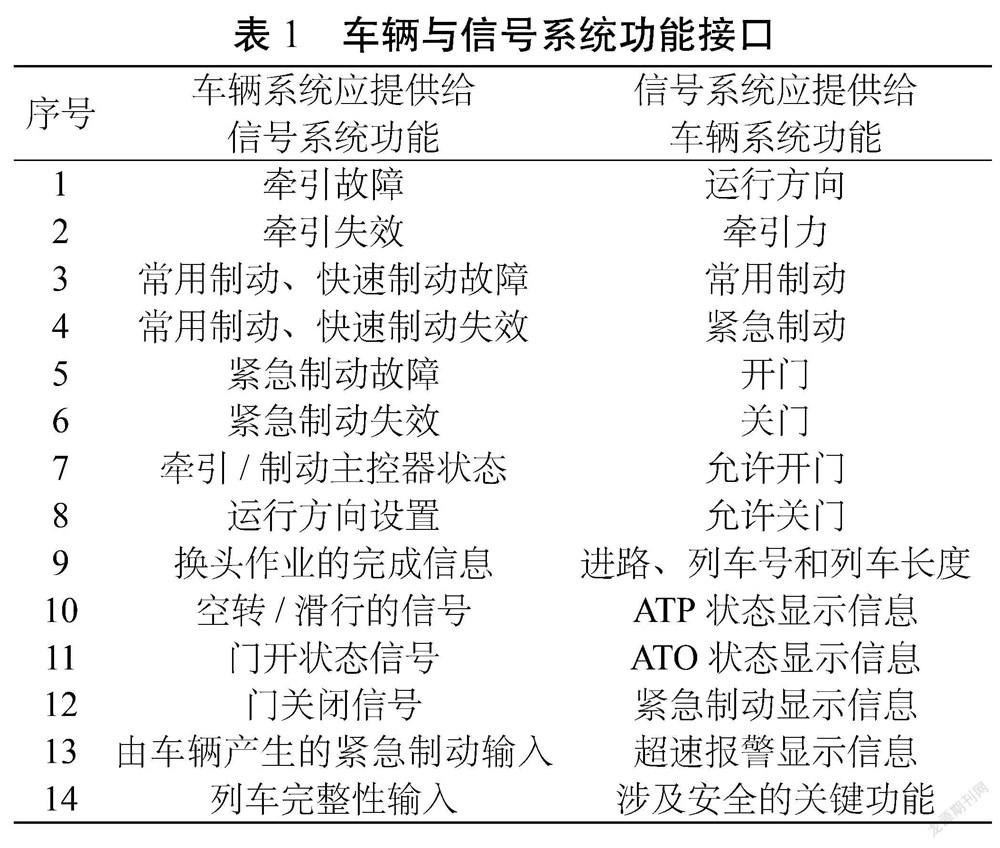
車輛系統能夠提供的信號系統功能有:列車的完整輸入、車輛產生的緊急制動輸入、門關閉的信號、門打開的信號、空轉和滑行的信號、自動完成換頭作業、運行方向的改變、牽引和制動主控制狀態、緊急制動失效、緊急制動故障、常用功能制動和快速制動失效、常用功能制動和快速制動的故障、牽引失敗以及牽引故障。信號系統應該提供給車輛系統的功能:涉及安全性的關鍵功能、超速報警顯示信息、緊急制動顯示信息、列車自動運行系統的狀態信息顯示、列車自動防護系統的狀態信息顯示、允許開門命令、允許關門命令、開門、關門、緊急制動、常用制動、牽引力的實時改變以及運行方向的改變,具體如表1。
3 信號系統與車輛之間相關接口的參數
車輛自身要為信號系統提供的接口信息以及相關參數有以下要求:
(1)列車自身的電氣系統的頻率參數以及靈敏度水平的測試參數。
(2)與信號設備靠近的接地點。
(3)列車在行駛過程中用到的線和用到的電纜相關數值。
(4)列車自身帶的管理通信系統的相關協議和彼此相應的時間。
(5)信號設備中要用到的DC 110 V的電源斷路器的參數與特點。
(6)執行命令的反應時間,例如接收到門控命令到門做出執行命令的時長。
(7)列車執行惰性命令的反應時長。
(8)列車一旦接收到ATC信號的執行命令并且執行命令啟動牽引的反應時長。
(9)當列車的任何一個單元出現故障以后,其緊急制動力的最快反應時長與常用的制動率。
(10)列車的牽引特性。
(11)列車在運行過程中常用的制動以及緊急制動的特點,還有速度變化的指標。
4 信號系統在安裝車輛過程面對的問題
在進行列車安裝的過程中,經常會出現很多車輛與信號接口的安裝問題。該文列舉出來一些重點問題進行探討,通過分析尋找到解決方案。
4.1 接口的安裝問題
在地鐵安裝成功后還未運營時,讓其在規定的路線上,進行千百次的模擬測試實驗,不斷完成重復的工作,以確認地鐵下方支架的承受能力,推斷出支架的狀態以及使用的大概年限。在安裝雷達的過程中,也要注意將雷達的工作面安裝到輪對的反方向,避免廢水沾污雷達表面,影響雷達正常運轉。
4.2 車輛與信號接口安裝問題
在車輛最初的設計階段,要把車輛的詳細駕駛功能以及信號系統的設計方案告知司機。地鐵在駕駛的過程中司機控制器通常有選擇模式與開關的選項。駕駛模式有非常多的選擇,例如自動運行、限速運行和自動駕駛等駕駛模式。限速運行模式下,車輛會根據司機控制器設定的模式而對車輛進行限速處理。在向前與向后過程中限速運行模式的限制速度為25 km/h。
在列車的自動運行模式下,列車的折返方式分成四種。分別是列車的自動防護監督模式、人工折返的模式、非限制人工折返模式,以及無人自動的折返模式,最難設計的是無人自動折返的模式。在這種模式下,信號系統應該將折返時序的設計方案提供給專業人員,并且對該方案進行說明。明確指出在不同的時序程序中列車會自動執行什么命令。而專業人員也應該對內容進行進一步的擴充理解。車載信號系統進行緊急制動命令后,要進行的操作過程如下:
(1)將列車通過駕駛員人工駕駛的模式下駛入終點站,進入折返的正確路徑。
(2)將駕駛室存在的兩個開關均進行斷聯的操作。
(3)駕駛員在激活無人折返駕駛模式的操作至少保持5 s。
(4)無人折返駕駛模式能夠快速得到所有門關閉的信息反饋。
針對上文情況進行細致的分析:在無人折返的情況下,系統會自動斷開高斷,就需要等待10 s后才可以重新發動牽引命令。針對這樣的情況,有兩個方案可以解決:前者為對于車輛進行修改,在按鈕觸發的過程中不斷開高斷,讓高斷一直運行。后者為信號系統上的改變,在信號系統的延遲牽引上進行改進。其延遲性可能會影響到折返的具體時間,在120 s內完全無法進行無人駕駛折返模式的開啟工作。可能會造成一定安全隱患,對緊急情況是非常大的考驗。
5 總結
城市軌道交通車輛與信號系統之間相輔相成,面對設定過程的各個階段以及接口關系環節,要做到詳細了解,對后續工作的開展進度以及工作效率都有非常強大的幫助。在日常工作中,人員需要日常檢查與定期維護,不斷學習科學技術,充分熟悉城市軌道交通車輛的設備、系統、線路等構造,提高管理維護效果。
參考文獻
[1]何玉琴, 張潛. 城市軌道交通與信號主要接口問題分析[J]. 城市軌道交通研究, 2016(8): 33-35.
[2]馬妍. 城市軌道交通無人駕駛系統中信號與車輛接口分析[J]. 城市軌道交通研究, 2018(6): 56-57.
[3]肖杰. 城市軌道交通車輛與信號系統接口研究[J]. 信息系統工程, 2018(10): 221-222.
[4]黃雷. 軌道交通信號系統與車輛接口的幾個常見問題探討[J]. 城市軌道交通研究, 2017(6): 234-235.
[5]劉毅. 城市軌道交通信號系統對外接口關鍵技術分析與實現[J]. 華東科技(學術版), 2018(6):89-91.