一種基于交通雷達的交通擁堵與交通事故判別方法
2022-04-15 11:33:45劉大學
交通科技與管理 2022年7期
劉大學


摘要 文章以交通雷達技術為研究背景,通過交通雷達的相關特征參數,結合相關交通擁堵判定決策算法,構建了城市道路交通擁堵和交通事故判定評價實驗系統。以實際道路雷達數據進行實驗,處理得到的平均車速、車流量與實際基本相符。經統計得到四級交通擁堵分布圖,顯示該文方法判別結果比模糊綜合判別法更準確。
關鍵詞 交通擁堵;交通事故;雷達;模糊綜合判別
中圖分類號 U491.3 文獻標識碼 A 文章編號 2096-8949(2022)07-0075-04
0 引言
隨著經濟快速發展,人們對出行質量的要求越來越高,城市交通建設隨之不斷進步,道路干線網絡不斷完善,機動車數量大幅攀升,過多車輛行駛導致交通擁堵,進而導致交通事故以及交通違章現象頻發[1]。城市交通干道上出現交通事故后,如不及時上報警訊并移動車輛,就會因事故車輛占道導致道路擁堵[2]。出現交通事故后,如沒有實施有效的處理,又會導致交通擁堵以事故發生地為圓心向外輻射,逐漸蔓延至周邊交叉路口,引發更加嚴重的擁堵,嚴重影響過路車輛的通行效率[3]。因而在城市道路交通運行中,需要對突發交通事故進行實時監測,從而提高交通事故處理的效率,縮短擁堵時間,對緩解因交通沖突造成的交通擁堵具有重大意義[4]。根據道路狀態信息,運用雷達系統恰當融入交通參數計算方法,構建融城市道路交通流參數檢測、交通狀況判定和交通事故判別為一體的完整系統,可以極大地緩解城市交通擁堵[5]。該文據此對交通擁堵與交通事故的判別方法進行了研究。
1 交通雷達檢測系統原理
在電磁波傳播過程中,由于接觸到物體而產生反射回彈。電磁波的振幅和頻率會因接觸到物體不同而出現差異。且該差異情況還會隨物體的運動狀態發生變化。倘若物體處于相對靜止狀態,所回彈的電磁波振幅和頻率將會保持恒定;倘若物體處于相對運動狀態,就會導致電磁波出現壓縮反射現象,致使電磁波頻率增大。該電磁波頻率會隨著物體的運動而產生變化,離電磁波發源地距離越遠,頻率越低。因此可將交通雷達監測系統運用于交通違章和交通事故的判定。
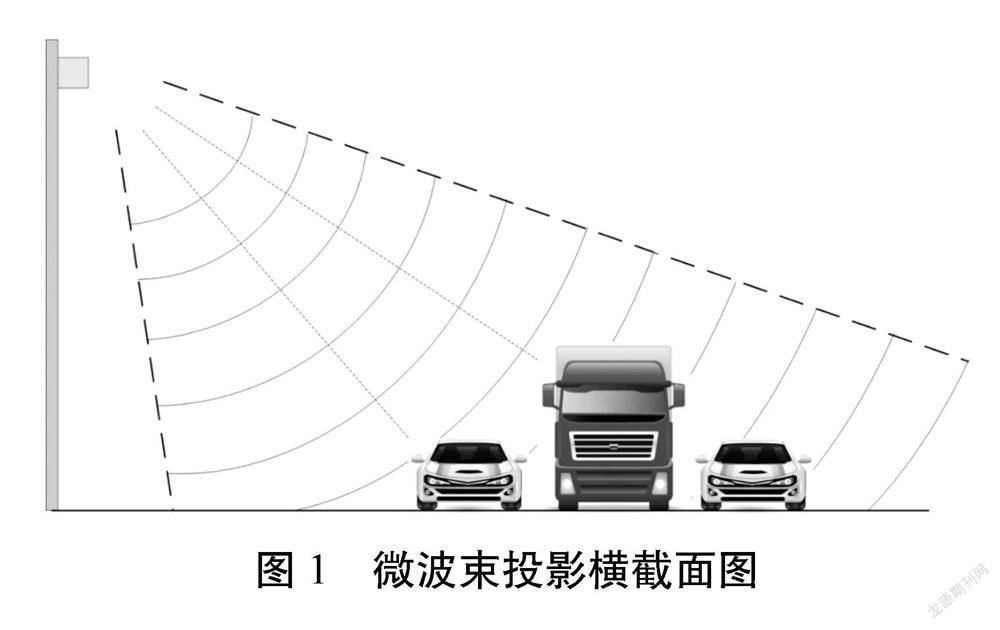
交通雷達采用陣列式結構,覆蓋城市道路交通干道進行檢測識別,并且對過往車輛的行駛狀態加以檢測,從而得到每臺車輛的行駛速度、車頭時速等參數。車輛在行駛過程中,與交通雷達之間的關系可以通過二者距離來呈現。二者距離與發射、反射電磁波的差值呈正相關,即距離越大差值越大。因而可以借此對車輛所處車道加以區分,使用濾波器進行識別。圖1所示為微波束投影橫截面圖。
2 基于交通雷達的交通擁堵與交通事故的判別
2.1 交通實時檢測
通過雷達與高清攝像頭關聯,一旦發生交通事故或車輛違章現象均可以通過對事發車輛進行拍照和交通雷達檢測,最大限度提高交通事故處理的效率[6]。即通過對過路車輛發射雷達電磁波,而后收集檢測由車輛反射回來的雷達電磁波頻率,繼而將電磁波信號轉化成雷達信號進行表達,按照實際車輛比例,將實際道路設施、道路渠化等與雷達匹配。進行坐標覆蓋,從而對排隊長度、交通流量、占有率等交通參數進行檢測。但是由于交通雷達所采集到的電磁波信號需要經過處理,才可以轉化為車輛行駛的其他交通參數,所以針對某一時刻的車輛信息具有一定的滯后性。為了將雷達檢測結果和車輛運行時刻統一,通過公式(1)進行計算:
(1)
式中,——光感系統檢測到數字信號所消耗的時間(s);——數據處理消耗的時間(s);——數據傳輸消耗的時間(s)。
2.2 交通事故檢測
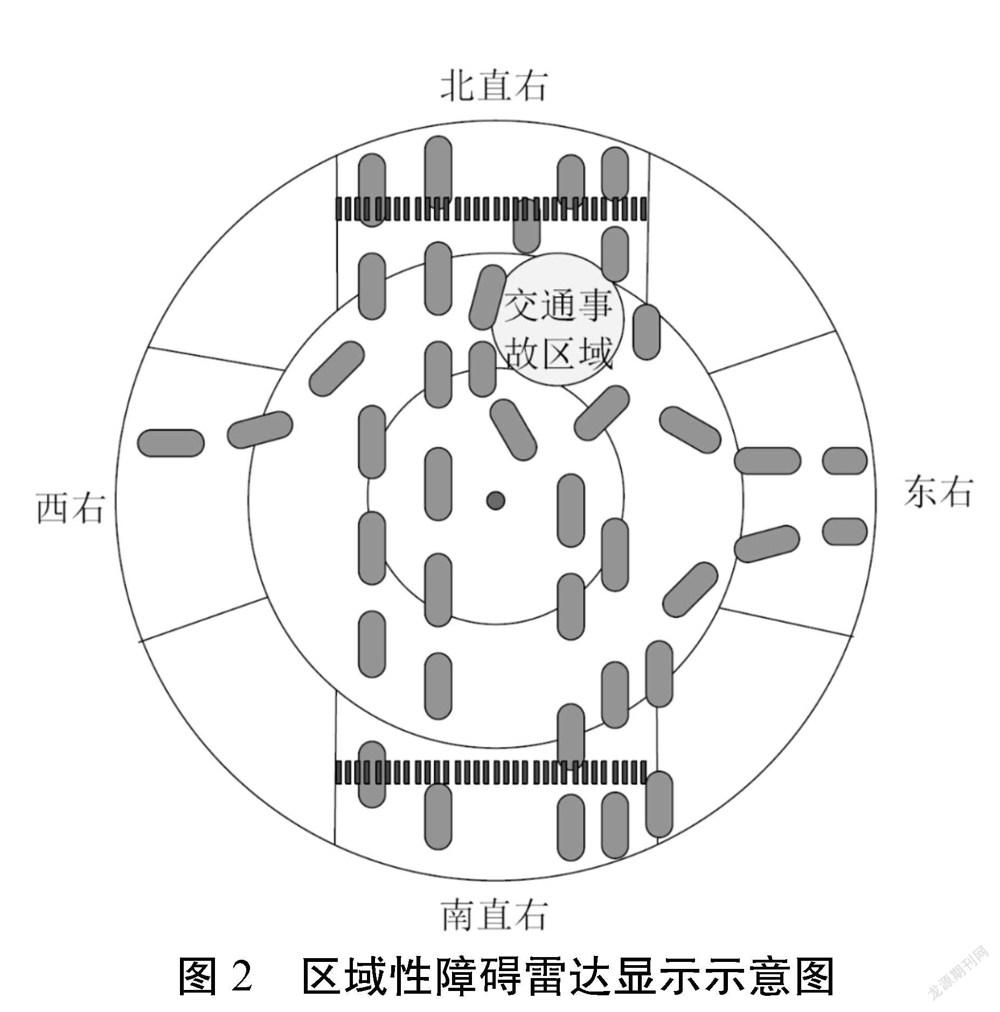
交通事的故復雜性、多源性使得交通沖突仿真具有極大的不確定性[7]。當兩個或兩個以上交通實體發生碰撞,雷達會將運行實體的軌跡檢測出,可識別是否發生交通事故。而后可以通過車輛的運行狀態和雷達所接收到的反射電磁波頻率來識別發生交通事故車輛為相對運動實體,在雷達上進行顯示。在發生事故時,會有車輛間碰撞接觸,也可進行識別。圖2為區域性障礙雷達顯示示意圖。
2.3 擁堵判定
在發生交通事故后,雷達通過檢測對區域性障礙位置進行確定,并對事故發生位置、占據車道情況進行精確判別。而后可以通過雷達反饋回的電磁波信號,通過擁堵方向、車輛時速、在車道停止線位置的不同、該城市交通干線車輛匯入率和擁堵方向的消散率之間的關系,來判斷該交通干道是否發生擁堵現象[8]。擁堵方向消散率的定義為:擁堵方向單位時間內通過事故發生地的車輛數,具體見公式(2)。
(2)
式中,——擁堵方向車輛消散率;——第條擁堵進口道車輛經停車線處車頭時距(s);——第條擁堵進口道方向綠燈時間(s);——事故發生地擁堵方向岔路口信號周期(s)。
其中,消散率與進口道車輛經停車線處車頭時距成反比,與車道數、信號放行時間成正比。第條車道方向綠信比,因此,。
定義為擁堵方向單位時間匯入車輛數為擁堵方向匯入率,,其中,——交通擁堵上游交叉口信號周期(s);——匯入擁堵方向車道車輛數(veh)。
當出現交通擁堵點后,根據擁堵方向匯入率及消散率的關系可知:在時,也就是擁堵方向匯入率要比消散率小,表明擁堵點處排隊車輛會消散。當,也就是擁堵方向匯入率與消散率相等,擁堵地點排隊車輛數量將會保持恒定不變,但是擁堵現象并不會對外蔓延。當,即代表了擁堵方向匯入率小于消散率,擁堵排隊車輛不僅會越來越多,甚至會出現更加嚴重的趨勢,并向外蔓延。
3 基于雷達處理交通特征參數的選取
判斷交通道路是否出現擁堵現象,最重要的識別因素是交通特征參數,因而需要選取合適的特征參數進行識別和分類判定。使用最為廣泛的交通特征參數有車速、車流量、交通密度、占有率、車頭時速、排隊長度、車頭間距等。但由于經常出現車輛遮擋現象,難以對車頭間距、排隊長度和車頭時速等參數進行計算,而交通密度的計算方式又十分復雜。該文的研究中選取速度、車流量、路面占有率作為判定該路段是否擁堵的重要決策變量。
3.1 基于雷達處理交通特征參數的檢測方法
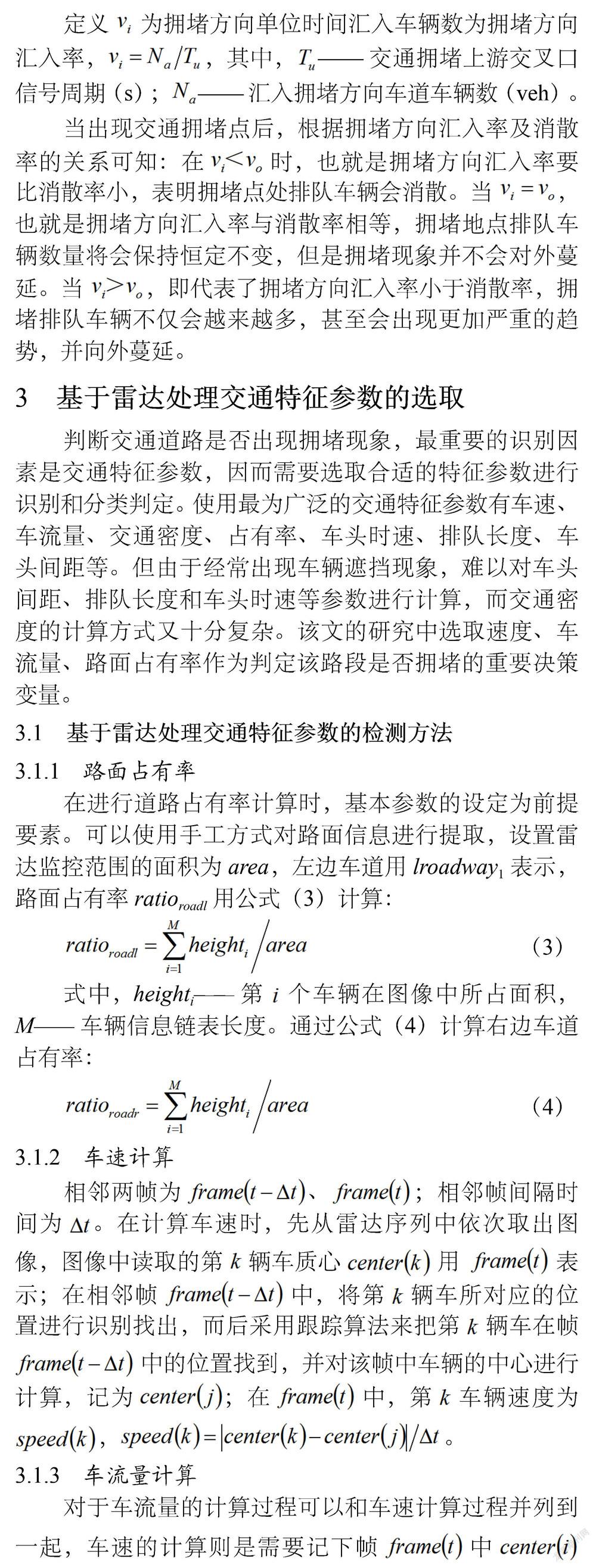
3.1.1 路面占有率
在進行道路占有率計算時,基本參數的設定為前提要素。可以使用手工方式對路面信息進行提取,設置雷達監控范圍的面積為area,左邊車道用lroadway1表示,路面占有率ratioroadl用公式(3)計算:
(3)
式中,heighti——第個車輛在圖像中所占面積,M——車輛信息鏈表長度。通過公式(4)計算右邊車道占有率:
(4)
3.1.2 車速計算
相鄰兩幀為、;相鄰幀間隔時間為。在計算車速時,先從雷達序列中依次取出圖像,圖像中讀取的第輛車質心用表示;在相鄰幀中,將第輛車所對應的位置進行識別找出,而后采用跟蹤算法來把第輛車在幀中的位置找到,并對該幀中車輛的中心進行計算,記為;在中,第車輛速度為,。
3.1.3 車流量計算
對于車流量的計算過程可以和車速計算過程并列到一起,車速的計算則是需要記下幀中的位置和幀中的位置,統計與間的車輛個數,可以得到車流量為。
3.2 特征參數與交通狀態的關系
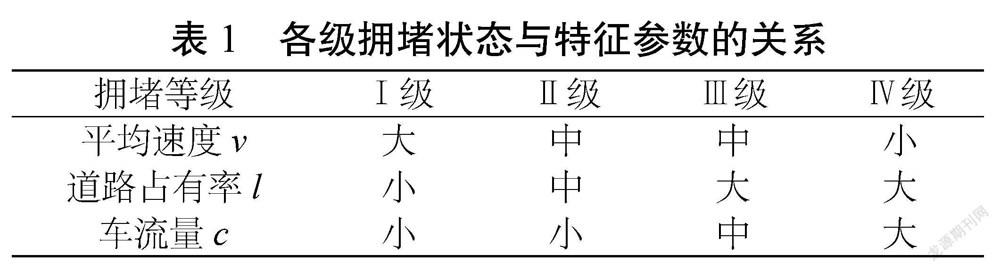
根據車輛的類型差異和不同交通道路的類型進行調整,從而得到表1中所展示的各級交通擁堵狀態與特征參數的關系。
3.3 模糊綜合評判方法
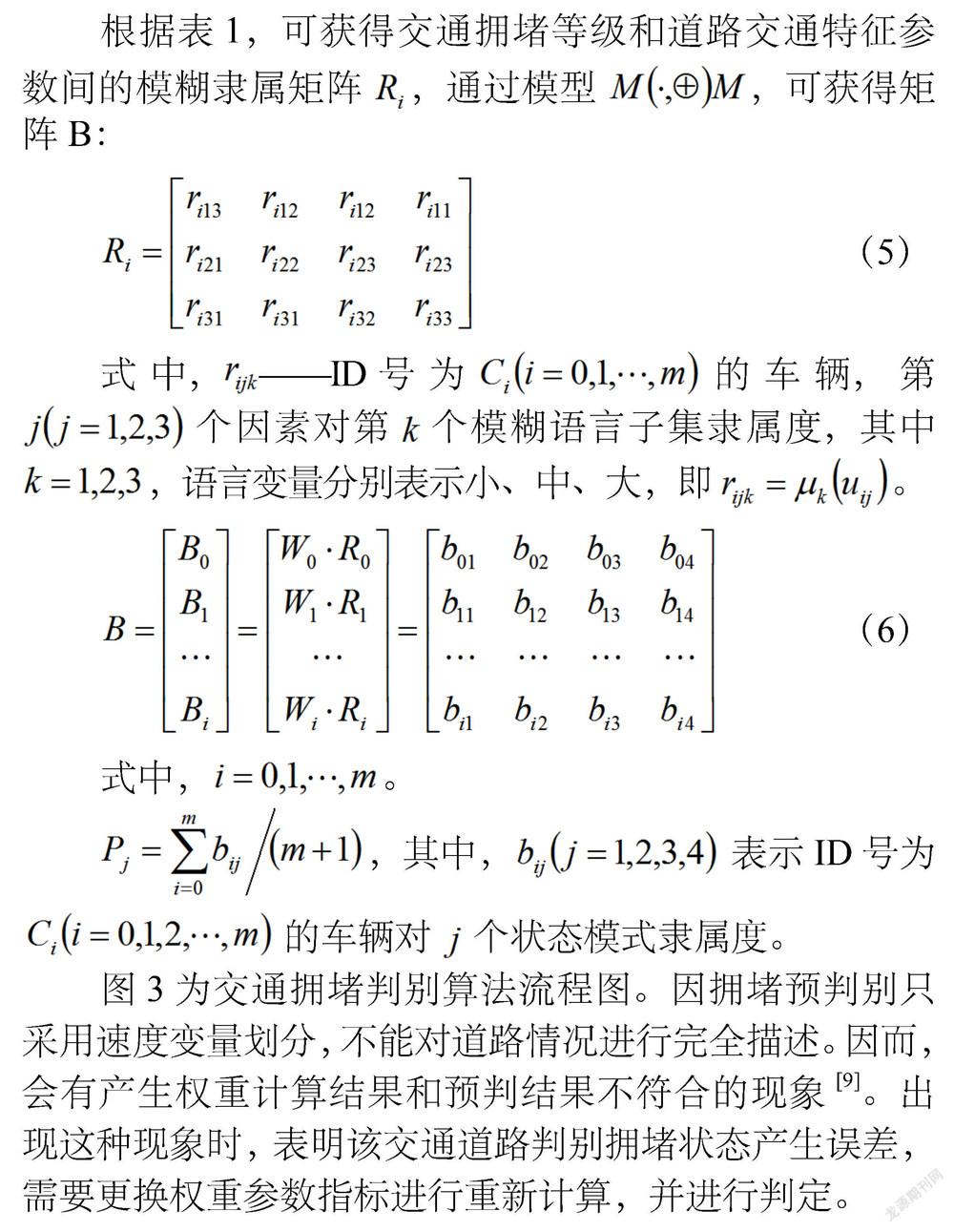
根據表1,可獲得交通擁堵等級和道路交通特征參數間的模糊隸屬矩陣,通過模型,可獲得矩陣B:
(5)
式中,——ID號為的車輛,第個因素對第個模糊語言子集隸屬度,其中,語言變量分別表示小、中、大,即。
(6)
式中,。
,其中,表示ID號為的車輛對個狀態模式隸屬度。
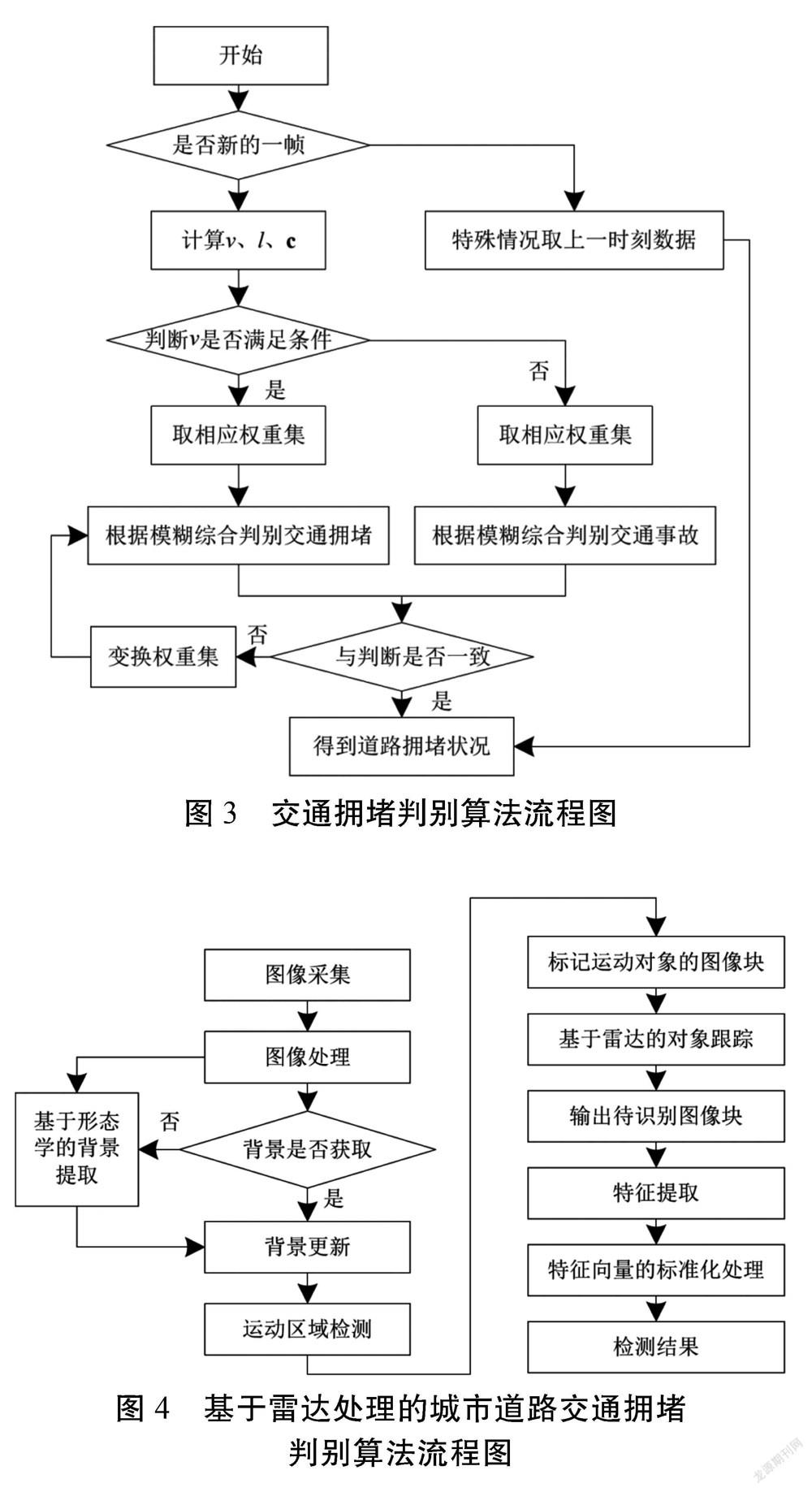
圖3為交通擁堵判別算法流程圖。因擁堵預判別只采用速度變量劃分,不能對道路情況進行完全描述。因而,會有產生權重計算結果和預判結果不符合的現象[9]。出現這種現象時,表明該交通道路判別擁堵狀態產生誤差,需要更換權重參數指標進行重新計算,并進行判定。
3.4 實驗算法流程
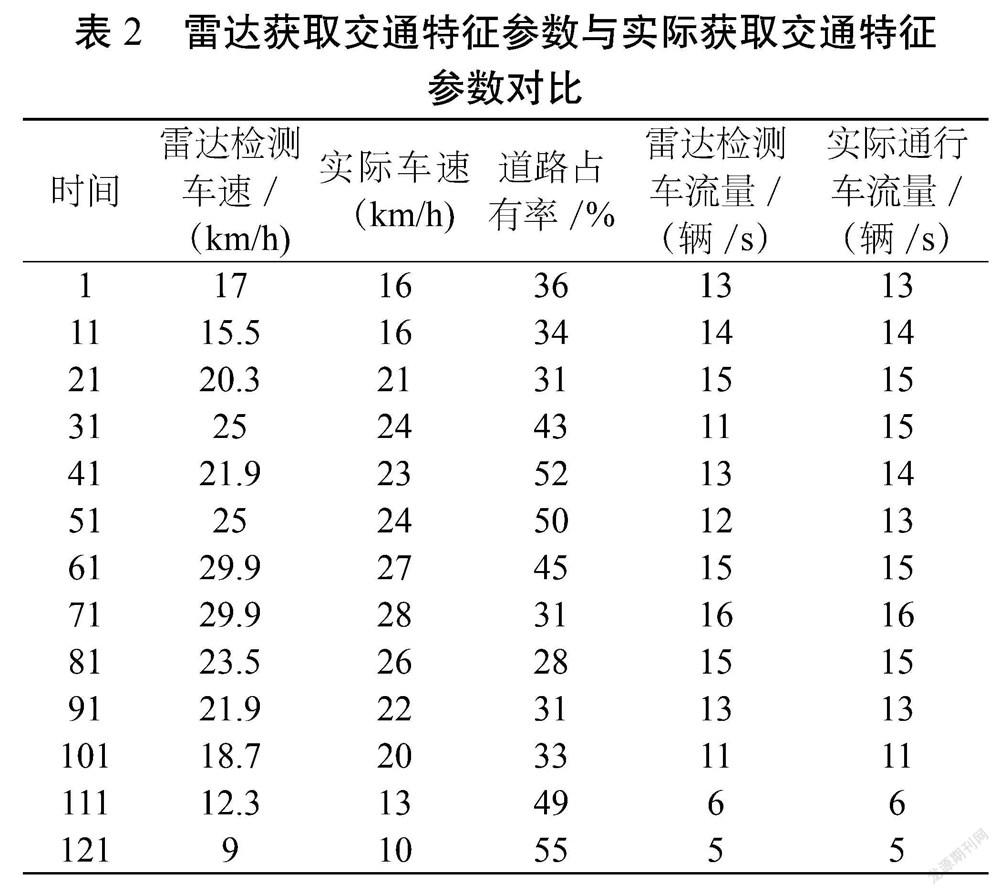
該文利用杭州市某道路旁的雷達數據進行實驗,其中計算機配置CPU為i3,內存為4 GB,處理器主頻為1.9×
2 GHz。圖4為基于雷達處理的城市道路交通擁堵判別算法流程圖。
表2為雷達獲取交通特征參數與實際獲取交通特征參數對比。而后再根據數據進行人工統計計算,最終得到實際車流量、車速數據。因道路占有率為不易實際計算的量,因此未進行數據對比。
由表2可知,雷達處理得到的平均車速基本符合實際的平均車速,道路在31 s、41 s、51 s中比較通暢,道路占有率突然增大。通過觀察,發現雷達中有體積較大車輛出現,在路況較暢通時,占有率升高,不同于111 s、121 s因為路況,由于該時段路段出現車輛體積較大,出現車輛完全遮擋的現象,導致出現車流量降低的錯誤判斷。實際獲取車流量和雷達檢測獲取車流量基本相同。
4 交通擁堵判別算法實驗結果分析
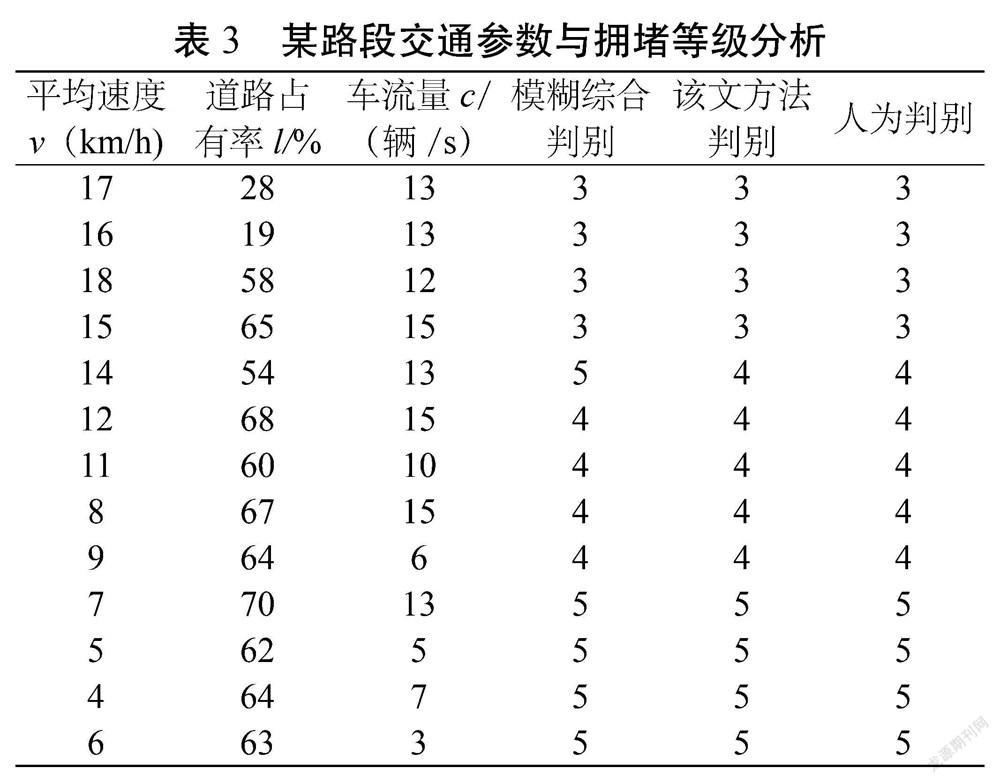
該文采用杭州市某路段雷達數據進行實驗驗證。由表3可知,在同一時段中,該路段開始交通擁堵狀態為一般,隨著時間的增長,就出現了十分擁堵的現象,雖然擁堵情況出現了緩解,但是依舊判定為Ⅲ級擁堵狀態,須提醒車輛繞道行駛。
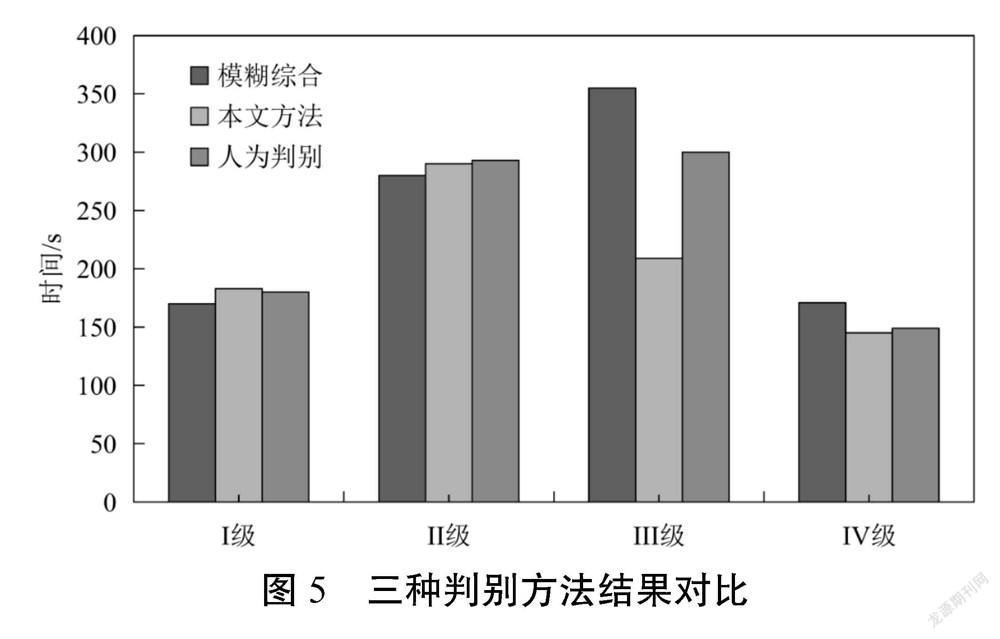
如圖5所示,將實驗數據和觀測數據進行對比,通過該文方法判別、模糊綜合判別、人為判別進行統計,得到四級交通擁堵分布數據。人為判別和該文方法數據更為接近,判別結果要比模糊綜合判別結果準確。
5 結論
該文基于交通雷達進行交通擁堵與交通事故判別方法研究,得出如下結論:
(1)將電磁波信號轉化成雷達信號進行表達,按照實際車輛比例,將實際道路設施、道路渠化等與雷達匹配。選取速度、車流量、路面占有率作為判定該交通路段是否出現擁堵現象的重要決策變量。
(2)該文構建了基于交通雷達的城市道路交通擁堵現象判定評價實驗系統,以杭州市某一主線道路所收集到的雷達數據進行實驗,雷達處理得到的平均車速基本符合實際平均車速,實際獲取車流量和雷達檢測獲取車流量基本相同。
(3)通過該文方法判別、模糊綜合判別、人為判別進行統計,得到四級交通擁堵分布數據,人為判別和該文方法數據更為接近,判別結果比模糊綜合判別結果準確。
參考文獻
[1]陳昊, 陸建. 基于VISSIM仿真的高速公路事故交通影響[J]. 長安大學學報(自然科學版), 2015(S1): 226-229.
[2]王進展, 曲大義, 曹俊業, 等. 基于多普勒雷達交通實時監控的交通沖突判別技術研究[J]. 科學技術與工程, 2016(32): 308-313.
[3]Zhang F, Knoll A. Vehicle detection based on probability hypothesis density filter[J]. Sensors, 2016(4): 510-523.
[4]張宙元, 余穩, 孫蕓, 等. 應用于交通信息檢測雷達的陣列天線設計[J]. 現代雷達, 2011(4): 67-70+75.
[5]史殿習, 丁濤杰, 丁博, 等. 一種基于非參數回歸的交通速度預測方法[J]. 計算機科學, 2016(2): 224-229.
[6]楊思琪. 高速公路交通擁堵狀況預測模型的研究與應用[D]. 廣州: 華南理工大學, 2017.
[7]孔棟, 王曉原, 劉亞奇, 等. 基于車載32線激光雷達點云的車輛目標識別算法[J]. 科學技術與工程, 2018(5): 81-85.
[8]左家駿, 楊瑞娟, 李曉柏, 等. QAM-OFDM雷達通信一體化信號雷達性能研究[J]. 現代雷達, 2020(8): 1-5.
[9]陳丹, 胡明華, 張洪海, 等. 基于貝葉斯估計的短時空域扇區交通流量預測[J]. 西南交通大學學報, 2016(4): 807-815.