基于圓形標定物的礦井下人員的定位方法
2022-04-19 09:19:44魏家瑩薛金虎
科學技術創新 2022年12期
關鍵詞:方法
魏家瑩 薛金虎
(中國礦業大學(北京)機電與信息工程學院,北京 100083)
煤炭是我國重要戰略資源,在我國一次能源消耗中占有重要地位[1]。礦井的精確定位方法是對煤礦智能化、自動化的重要支撐,因此研究煤礦井下精確定位技術與方法具有重要意義[2]。煤礦井下的定位存在著一整個完整系統,該系統由四部分組成:地面中心站、定位分站、天線和標識卡。實現定位必不可少的是測距方法,目前應用于井下的測距方法分為兩類,第一類是RSSI(Received Signal Strength Indicator,RSSI)的測距模式,通過人員身上攜帶的標識卡傳送到定位分站,獲得相應人員位置信息,定位系統誤差在10 米以上,該種測距模式是在Wi-Fi、RFID(RadioFrequencyIdentification,RFID)和ZigBee 三種無線技術下實施;第二類是基于傳輸到達時間(Time of Arrival,TOA)的測距模式,將時間與電磁波傳播速度相乘得到移動節點與相應基站間的距離,而定位精度在0.3 米,對于再提高定位精確難以進一步實現,該種測距模式是在UWB(UltraWideBand,UWB)技術下實施。
煤礦井下工作環境昏暗,照明環境普遍不好,以黑白灰為主要顏色,而圓形安全標定物顏色鮮明的同時在井下也是必不可少。因此,本文提出了一種基于圓形標定物的礦井下人員的定位方法,通過識別相機采集到的圖像中的圓形標定物,在已知圓形標定物直徑的情況下測量移動人員與圓形標定物的距離,此方法對于攜帶攝像機的移動設備和人員都能夠做到距離的精準判斷。
1 橢圓檢測方法
圖像預處理:
RGB 顏色空間不能做到亮度與色度的完全分離,它是個線性空間,其亮度的變化會引起色度的變化。YUV色彩空間是不同于RGB 色彩空間的另外一種顏色空間,其基本特征是將亮度信號和色度信號分離表示。而本文采用的是YUV 顏色空間中的YCrCb 顏色空間,其中Y表示亮度信號,Cr(U)和Cb(V)是兩個彩色分量,表示色度信號,Cr、Cb 分別反映了RGB 輸入信號紅色和藍色部分與RGB 信號亮度值之間的差異。RGB 和YCrCb 色彩模型之間的轉化公式:

RGB 轉換為YCrCb 顏色空間是YCrCb 使用RGB 信息產生一個灰度圖像Y,將提取出的R、G、B 顏色變成Cr、Cb 來描述顏色,把三個信號組合回來產生一個新的全彩色圖像。
對RGB 圖像轉換為YCrCb 顏色空間的全彩色圖像,根據顏色特征進行閾值處理得到灰度圖,灰度圖像將圓形標定物與背景區域進行分割,再進行自適應閾值得到圖1(b)中的二值圖像,二值圖像為后續的圓形標定物的檢測識別起到關鍵作用。
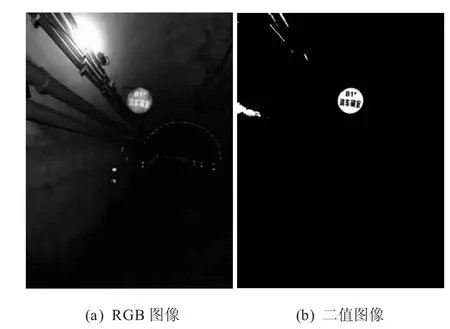
圖1 二值圖像
2 最小二乘法的橢圓擬合算法
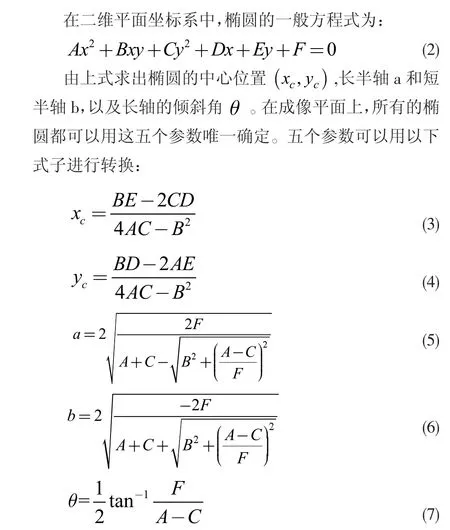
2.1 橢圓的表示方法
2.2 最小二乘法的橢圓擬合算法
最小二乘法[1]即假設樣本測量點產生的隨機誤差為正態分布,由最大似然估計法推出的一個最優估計解的方法[2],該方法的基本約束條件是測量的誤差平方和最小。因為誤差的大小能夠直接反映出擬合精度高低,因此這種方法是常用的擬合方法之一。最小二乘法的主要任務是尋找一組參數,從而使數據點與橢圓之間的距離最小化的一種度量。其中距離的度量常用的是代數距離和幾個距離。
將橢圓的一般方程式(2)用兩個向量相乘的形式表示,如式(8)所示:
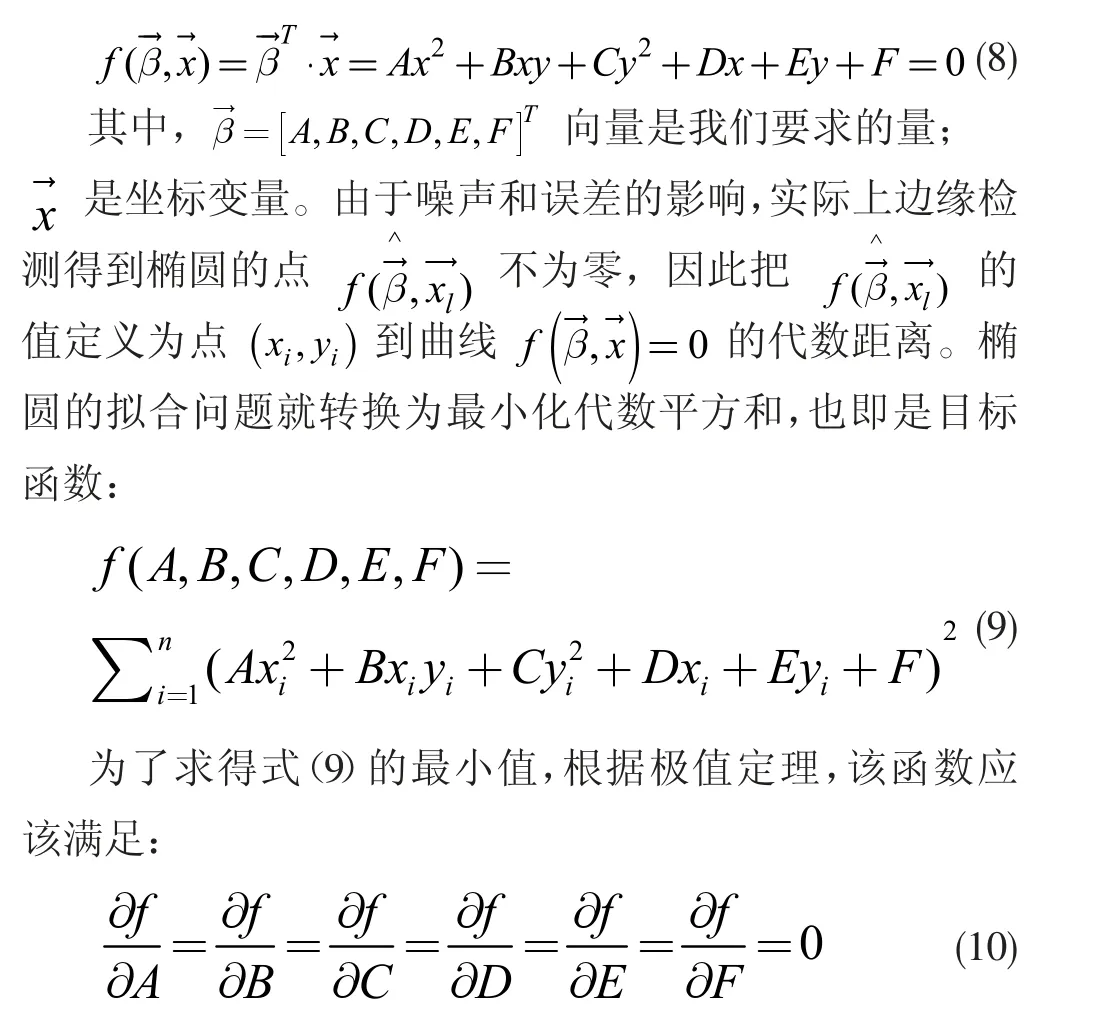
由此解得參數A、B、C、D、E、F 的值,確定橢圓參數完成橢圓檢測。
3 單目測距系統原理
3.1 橢圓長軸是圓的直徑
在投影中,任何一條與投影平面相垂直的直線,都被稱為投影平面的垂線。垂直線可以分為三種:垂直于H平面的線叫做垂線、垂直于V 平面的線叫做正垂線、垂直于W 平面的線叫做側垂線。投影面按照投影方向分三類:H 面是水平投影,V 面是正立投影,W 面是側立投影。具體如圖2 表示:
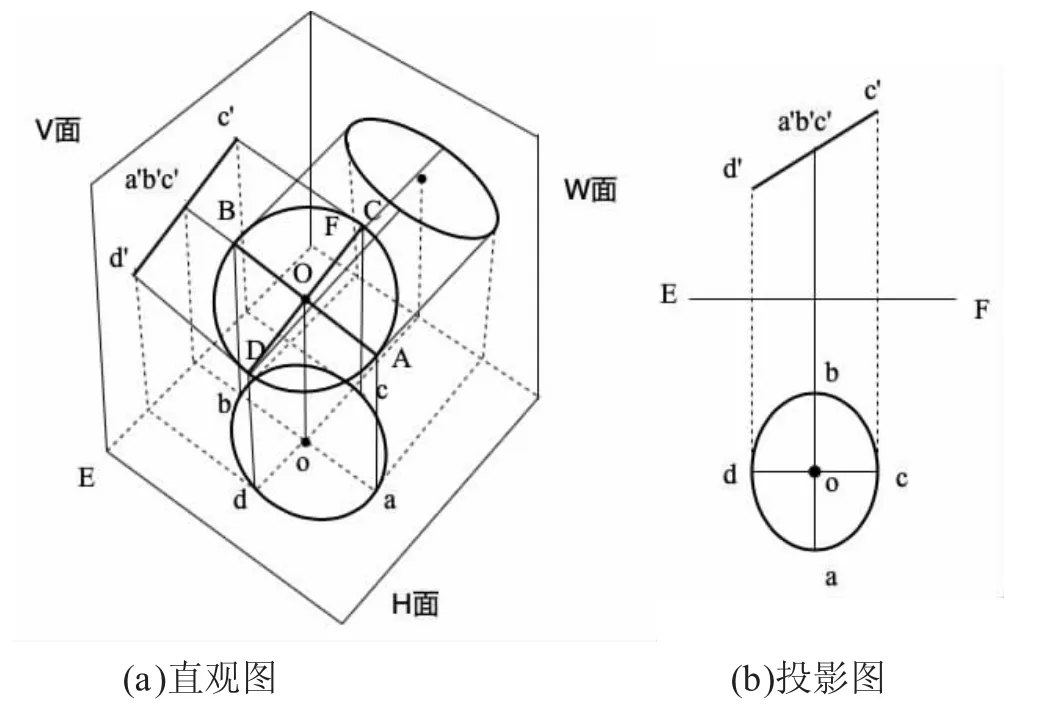
圖2 圓的正投影
圖2(a)是一個圓分別向三個面進行投影的圖,其中V面是正立投影面,H 面是水平投影面,W 面是側立投影。從圖中可以清楚的看出,一個傾斜圓再向不同平面進行投影發生的變化,也能夠驗證上述的正投影特性。圓具有旋轉不變性,圓因由無數條對稱軸,無論何種變化角度都會存在與圓的直徑相等的一條線段。圖中的圓的直徑AB 就等于在H 面投影的橢圓的長軸ab,同時,在H面投影上的短軸cd 就是c'd'的投影長度,根據直徑投影定理可知,橢圓的長軸ab 與短軸cd 是相互垂直的。在H面上的投影為橢圓的規律,同樣適用于W 面上,在W 面上也存在一個橢圓,橢圓的長軸是圓的直徑,短軸與其相互垂直。在V 面上的投影,上述也提到過c'd'就是圓的直徑,c'd'投影就是橢圓短軸cd。攝像機在拍攝圓形標定物時會產生俯仰角,但是由于圓形在任何角度拍攝都有一條長軸與圓形直徑相同,所以攝像機根據檢測到的橢圓長軸也就是一條直線進行單目測距能夠得到精準定位。
3.2 攝像機標定
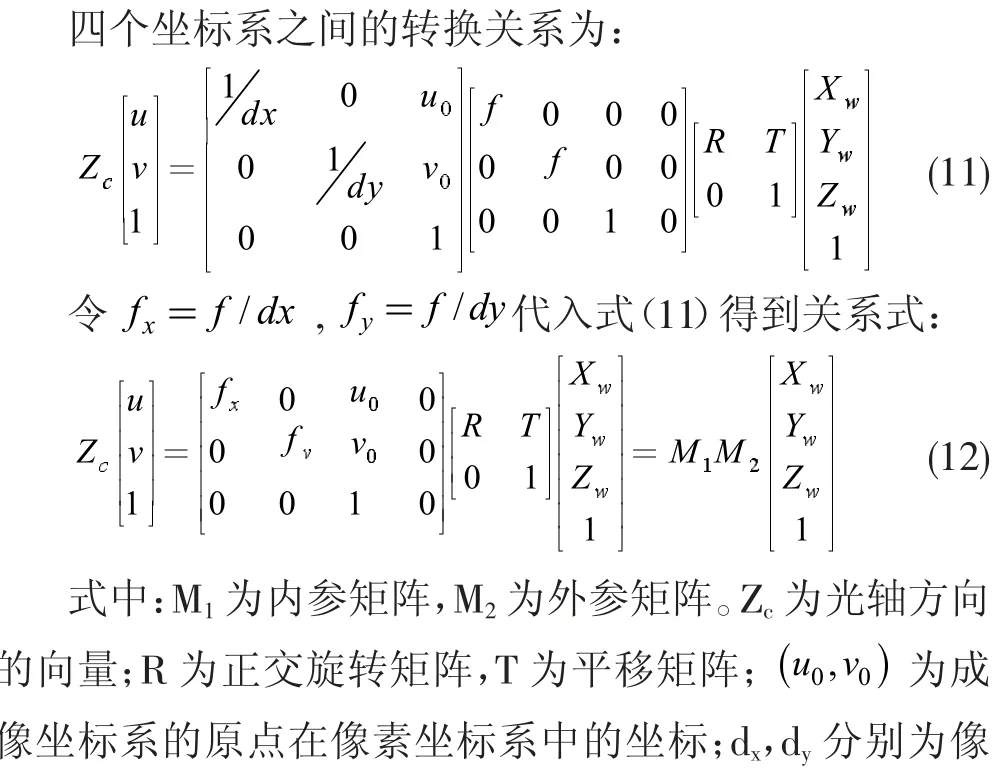
攝像機的針孔模型[3]將現實空間的三維場景投影到CCD 攝像機的二維平面上,這個過程涉及了四個坐標系的轉換,包括世界坐標系OwXwYwZw、相機坐標系OcXcYcZc、成像坐標系Oxy 和像素坐標系O0uv。根據小孔成像原理,成像坐標系應該在相機坐標系另一邊,為了方便理解投影至同側,如圖3 所示。圖中,空間中任一點P 在世界坐標系中的坐標為(Xw,Yw,Zw);空間中P 點映射到像素坐標系中的坐標為(u,v)。
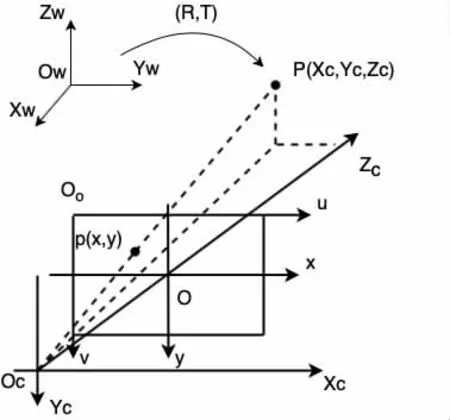
圖3 坐標系變換關系

3.3 單目測距方法
單目測距[4]方法依靠于小孔成像模型,在實際應用中,根據圓的投影特性可知橢圓的長軸就等于圓形的直徑,將橢圓長軸作為待測目標物,根據小孔成像原理可得到如圖4 所示:
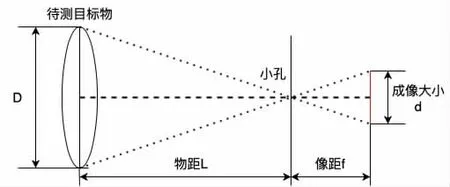
圖4 單目測距方法

圓形標定物在成像上的直徑d 可由相機標定后的內參矩陣M1和公式(13)得出,從而求出當前攝像機與圓形標定物之間的距離L。
4 實驗結果與分析
實驗中開發工具為PyCharm+OpenCV4,程序語言為python。本文采用的圖像均在國家能源集團寧夏煤業有限責任公司雙馬煤礦井下現場采取。
本文是基于圓形標定物的礦井下人員的定位方法,首先采集到的圖像轉換到YUV 顏色空間通過閾值分割轉換為0 和255 的灰度圖像對圓形標定物進行提取,再將預處理后的灰度圖進行圖像分割和輪廓識別,采用最小二乘橢圓擬合方法將圖像中的圓形標定物進行擬合,最后根據相機的小孔成像對橢圓中的長軸進行距離測量。將此方法應用到礦井下進行人員定位,此圓形標定物檢測的效果圖如圖5 所示,并對圓形標定物5m、10m、15m 和20m 的距離進行測距得到表1 的結果。
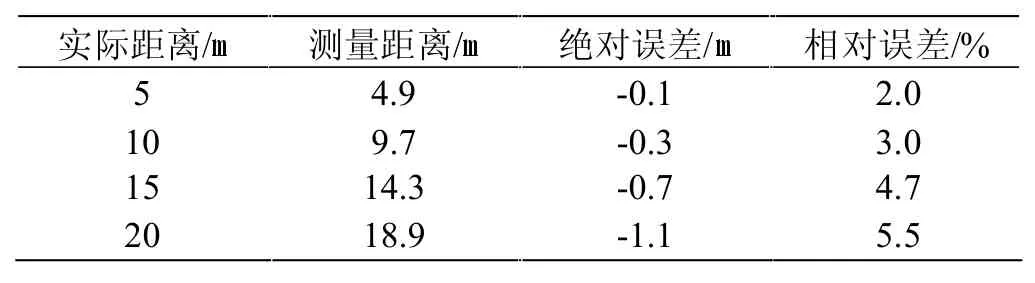
表1 井下人員方向確定
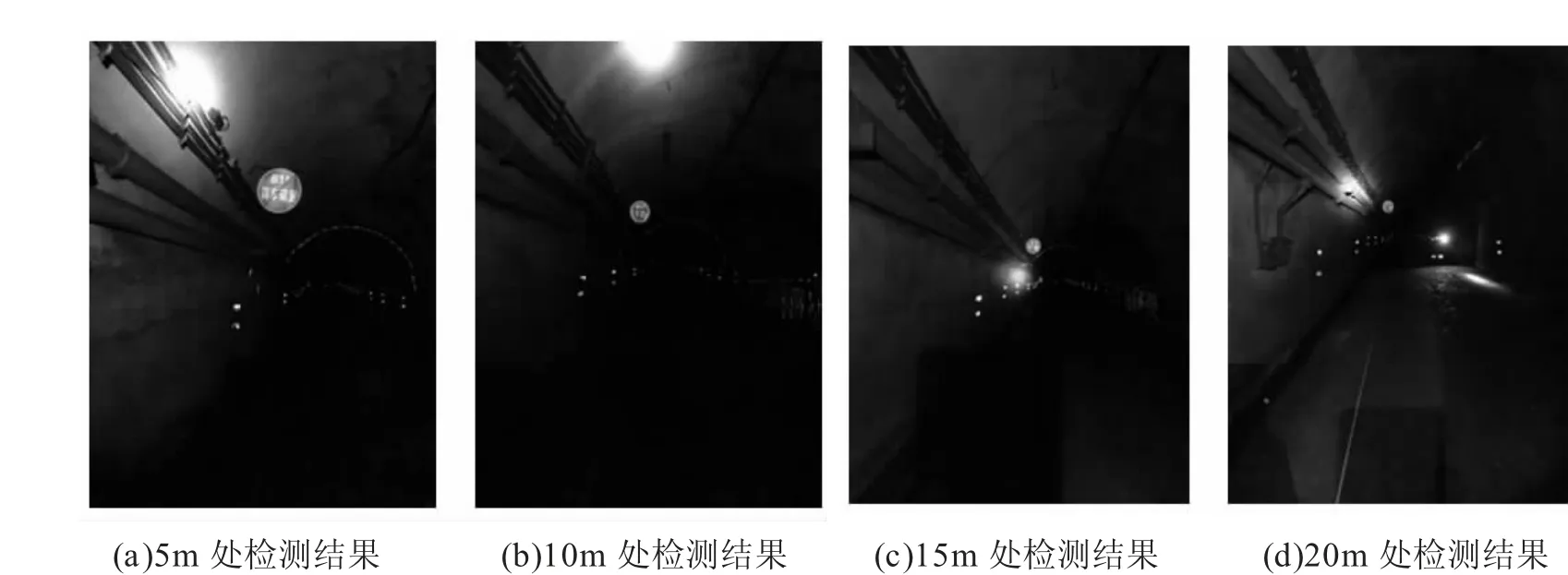
圖5 圓形標定物檢測結果
5 結論
根據礦井下環境特點和圓形標定物的顏色特征,將采集到的圖片轉換到YUV 顏色空間,相比較其他顏色空間更適應于本文的場景。接著采用最小二乘法的橢圓擬合算法能準確檢測出圓形標定物。根據圓的正投影特性可知圓形的直徑就是橢圓的長軸,圓具有旋轉不變性,視角的變化不會引起圓的直徑的變化。在相機成像后始終有一條橢圓的長軸與圓的直徑成比例,所以根據檢測到的橢圓長軸也就是一條直線進行單目測距能夠得到精準定位。井下應用結果表明,根據已知圓形標定物的直徑采用單目測距有較高的準確性,不會受角度和方向的影響,但是在對圖像預處理和橢圓檢測上都還有所提升。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56