煤礦沉陷水域水體深度多源數(shù)據(jù)融合反演
2022-04-20 11:20:06王明達徐良驥葉偉劉瀟鵬
遙感信息 2022年1期
關(guān)鍵詞:模型
王明達,徐良驥,2,葉偉,劉瀟鵬
(1.安徽理工大學(xué) 空間信息與測繪工程學(xué)院,安徽 淮南 232001;2.安徽理工大學(xué) 深部煤礦采動響應(yīng)與災(zāi)害防控國家重點實驗室,安徽 淮南 232001)
0 引言
由于煤礦的長期開采,導(dǎo)致我國東部高潛水位礦區(qū)逐年形成大量的沉陷“水域”,因為沉陷水域形狀不規(guī)則、分布較為獨立,并且隨著開采的進行,沉陷水域的范圍和深度也不斷發(fā)生變化,這些因素都給沉陷水域水資源的調(diào)查及其管理增加了一定的難度。如何準確、高效、低成本地獲取煤礦沉陷水域水體深度成為當前相關(guān)領(lǐng)域?qū)W者關(guān)注的重點之一[1-2]。沉陷區(qū)的地表下沉伴隨著礦井工作面開采持續(xù)進行,范圍也持續(xù)擴大,要求沉陷區(qū)水深測量具有周期性[3]。傳統(tǒng)沉陷水域水深測量是操作無人船完成的,因沉陷水域分布分散,大大提高了無人船水深測量的成本。遙感水深反演技術(shù)相比傳統(tǒng)的水深測量技術(shù)有著明顯的優(yōu)點,如周期短、探測范圍廣、不受地理與人為條件限制、成本低。
遙感水深反演技術(shù)是使用遙感影像反射率來估計水深的測量方法。自20世紀50年代起,國內(nèi)外的研究學(xué)者對水體水深反演一直保持著高度的研究熱度,反演方法可總結(jié)為三種:經(jīng)典模型、半理論半經(jīng)驗?zāi)P秃徒y(tǒng)計相關(guān)模型[4]。Lyzenga[5]根據(jù)電磁波在水體和大氣中傳播時輻射能量變化規(guī)律,建立并簡化了電磁波輻射傳輸模型,在淺海區(qū)域驗證了模型的可靠性。戚甲偉等[6]基于南海北島附近海域的WorldView-2高分辨率影像數(shù)據(jù)和實測數(shù)據(jù),構(gòu)建對數(shù)變換模型與雙波段線性回歸模型,對海底水深進行反演精度評估,并且研究了不同海底底質(zhì)對水深反演精度的影響。張磊[7]利用Landsat-8影像數(shù)據(jù)與無人船實測數(shù)據(jù),構(gòu)建12個反演因子的多波段模型,在檢驗組的反演中得到的總體平均絕對誤差在0.72 m左右。溫開祥等[8]利用Sentinel-2多光譜影像在經(jīng)典模型的基礎(chǔ)上對梅州水庫進行水深反演研究,運用三種深度學(xué)習(xí)算法對模型進行訓(xùn)練,與經(jīng)典模型反演精度進行對比,結(jié)果表明深度學(xué)習(xí)算法提高了水深反演的精度。遙感水體水深反演研究方向主要集中于淺海地區(qū)[9],但在礦區(qū)沉陷水域水體的水深反演研究成果不多。吳雙等[10]利用Landsat-5TM結(jié)合煤礦開采沉陷預(yù)計軟件對淮南礦區(qū)沉陷水域水體水深進行反演研究,構(gòu)建多元非線性正值模型,擬合優(yōu)度達到了0.97。本文以Sentinel-2影像數(shù)據(jù)結(jié)合SVM算法對經(jīng)典模型進行精度優(yōu)化,探討礦區(qū)沉陷區(qū)水體水深反演精度,以及不同水深區(qū)間的模型反演精度,為礦區(qū)沉陷水域水資源開發(fā)利用提供水深獲取方法的參考。
1 研究區(qū)概況
謝橋煤礦地處淮南礦區(qū),位于安徽省潁上縣謝橋鎮(zhèn),區(qū)域煤層厚且發(fā)育穩(wěn)定,受煤層開采、高潛水位影響,礦區(qū)地表形成大量的沉陷水域。選取其中一個面積較大的沉陷水域作為研究區(qū)。研究區(qū)位于謝橋礦西翼采區(qū),東西長約3 000 m,南北長約1 500 m,沉陷水域面積約4.5 km2,深度約0~12 m[11]。研究區(qū)域常年降雨量在1 040 mm以上[12],地下水充足,沉陷水域前身多為農(nóng)田、道路、村莊等。目前沉陷水域多用于開闊型湖面養(yǎng)魚,水草、漁網(wǎng)等較少,無潮汐現(xiàn)象。
2 反演方法與模型建立
2.1 多光譜反演水深的基本原理
多光譜反演沉陷區(qū)水域水深的目的是建立遙感影像像元輻射通量與水深之間的表達式。而可見光在水體中傳播時,一部分能量被水面吸收、反射、散射掉,另一部分能量被水底反射回大氣被傳感器接收。這種光具備水下地形信息,是遙感反演水深的主要數(shù)據(jù)源,可見光會因水體的吸收和反射而衰減。入射輻射通量表示如式(1)所示。
TZ=e-αz
(1)
式中:TZ是水深為z時的入射輻射通量;α為可見光衰減系數(shù)。考慮到可見光在水體中的反射影響,水體輻射量表達如式(2)所示。
LE=e-2kzLb+(1-e-2kz)LW
(2)
式中:LE為水體輻射量;Lb為底部反射的離水輻射量;LW為深水區(qū)輻射量;k為水體反射系數(shù)。將水體的輻射量歸一化為反射率,表達如式(3)所示。
RE=e-2kzRb+(1-e-2kz)RW
(3)
式中:RE為水體反射率;Rb為底部反射的離水反射率;RW為深水區(qū)反射率。水深表達如式(4)、式(5)所示。
RE=K1e-k2z
(4)
z=a0+a1ln(RE)
(5)
式中:z為水深;RE為水體的反射率;a0和a1為未知參數(shù),這些參數(shù)根據(jù)實測水深與反射率之間的關(guān)系求解。
當沉陷區(qū)水域清澈且水質(zhì)分布均勻時,可以使用式(4)、式(5)直接估算水深。但沉陷區(qū)水域的水底空間分布不均勻、水體中懸浮物較多,因此,本文使用多光譜反射率結(jié)合式(4)、式(5)來反演水深。
2.2 水深反演模型
1)單波段模型。基于水深反演的基本原理,單波段模型的水深反演如式(4)、式(5)所示。
2)多波段模型。多波段模型集成了不同波段對水體的反射率的影響,根據(jù)Polcyn等[13]的研究,多波段模型適用于水體底質(zhì)均勻、波段反射比一致、水深較淺水體的水深反演,表達如式(6)所示。
z=a0+a1ln(R1)+…+anln(Rn)
(6)
式中:z為水深;a0、a1、an為未知參數(shù);R1為波段1的反射率;Rn為波段n的反射率。
3)雙波段對數(shù)比值模型。雙波段對數(shù)比值模型是由Stumpf[14]提出,水體深度對較高衰減特性波段的影響遠遠大于較低衰減特性的波段。因此,雙波段對數(shù)比值模型對水體深度變化有很強的敏感性。
(7)
式中:Ri和Rj分別為i和j波段的反射率。
2.3 基于SVM改進的反演模型
SVM作為常用機器學(xué)習(xí)中的一類,主要用于數(shù)據(jù)分類與回歸等問題[15]。本文利用SVM回歸對數(shù)據(jù)具有的稀疏性,若樣本點與回歸模型足夠接近,即落入回歸模型的間隔邊界中,利用核函數(shù)將樣本空間變?yōu)榫€性可分空間,利用間隔邊界對樣本進行預(yù)測分析。沉陷區(qū)水域底質(zhì)變化大、水深高低起伏大,選擇擬合優(yōu)度最好的三種模型使用SVM對模型進行回歸分析。利用沉陷區(qū)參考水深值作為因變量,反射率為自變量進行預(yù)測分析。本文的水深反演技術(shù)路線如圖1所示。
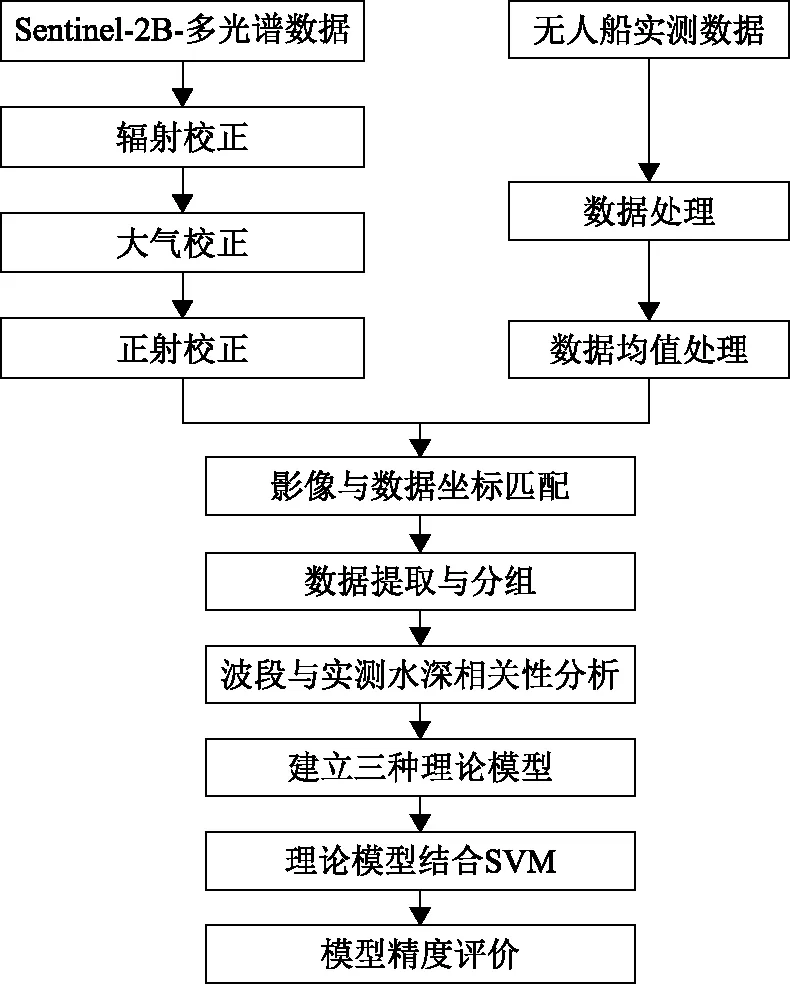
圖1 水深反演流程圖
3 數(shù)據(jù)獲取與處理
3.1 水深數(shù)據(jù)獲取
1)無人船測量原理。水深參考值取自于2018年8月智能無人船的實測數(shù)據(jù)。無人船測量系統(tǒng)的核心任務(wù)是進行水深測量和導(dǎo)航定位,實現(xiàn)這些任務(wù)所需要的儀器設(shè)備包括數(shù)字測深儀、姿態(tài)傳感器、GPS接收機、全角度攝像頭和距離傳感器等。智能無人船系統(tǒng)的導(dǎo)航定位主要采用GPS-RTK動態(tài)差分定位原理,在岸邊基準點架設(shè)GPS基準站接收GPS衛(wèi)星差分信號,并將差分數(shù)據(jù)發(fā)送給智能無人船安置的GPS接收機,實現(xiàn)實時定位和導(dǎo)航功能。水深測量由安置在船上的數(shù)字雙頻測深儀完成。
2)無人船測量方法。無人船測量水深首先需要將坐標系統(tǒng)進行4參數(shù)求算,在岸邊找到合適的點位架設(shè)基站。根據(jù)沉陷積水區(qū)湖面實際情況規(guī)劃無人船行駛路線,設(shè)置航行速度為6~7 km/h,保證無人船航行的穩(wěn)定性。實時查看無人船船控電腦的數(shù)據(jù),保證信號固定和航行姿態(tài)正常。利用HiMAX測深軟件對水深數(shù)據(jù)進行處理。
3.2 影像數(shù)據(jù)
Sentinel-2分為2A和2B兩顆衛(wèi)星,是高分辨率多光譜成像衛(wèi)星,用于陸地監(jiān)測,可提供植被、土壤、水資源、內(nèi)陸水路及海岸區(qū)域等圖像,還可用于緊急救援服務(wù)。Sentinel-2B衛(wèi)星于2017年3月7日發(fā)射,與2015年6月23日發(fā)射的Sentinel-2A為一組衛(wèi)星,衛(wèi)星攜帶高分辨率多光譜成像裝置,高度為786 km,共覆蓋13個波段,一景影像寬達290 km[16]。研究區(qū)域的遙感影像數(shù)據(jù)選用與水深測量相近時期2018年10月12日的Sentinel-2 Level-1c遙感影像數(shù)據(jù),該景影像的水體邊界清晰,研究區(qū)域上空無云,云量0.07%。為獲得真實的地物反射率,運用歐空局針對Sentinel-2數(shù)據(jù)的預(yù)處理專門開發(fā)的Sen2Corc插件,對影像進行輻射定標、大氣校正、正射校正,使用歸一化水體指數(shù)(normalized difference water index,NDWI),設(shè)置閾值,對沉陷區(qū)水域進行提取。
3.3 數(shù)據(jù)匹配處理
本文使用的參考水深數(shù)據(jù)為沉陷水域?qū)崪y水深數(shù)據(jù),無需進行潮汐改正。為實現(xiàn)水深數(shù)據(jù)與Sentinel-2影像像元的輻射亮度值一一對應(yīng),將無人船測得的共1 846個水深點,使用ArcGIS將水深數(shù)據(jù)與影像數(shù)據(jù)統(tǒng)一到UTM、WGS-84投影坐標系中,根據(jù)設(shè)置好的基準點進行地理配準。因無人船連續(xù)自動采集數(shù)據(jù)的間隔距離設(shè)置為5 m,使用影像數(shù)據(jù)的空間分辨率為10 m,所以在一幅影像像元分布著一個或多個水深采集點。為了提高反演精度,去除一個像元中小于等于一個實測值的點。選取一個像元中的實測值均值作為像元區(qū)域的水深值。為了更好地對實測數(shù)據(jù)與遙感數(shù)據(jù)進行匹配和統(tǒng)計分析,最終處理后的水深數(shù)據(jù)分為530個作為訓(xùn)練組、65個作為檢驗組。檢驗組用于檢驗?zāi)P驼`差不參與建模。
3.4 反演因子的選擇
理論上可見光穿透清澈的水體時,在可見光的波段范圍中,不同波長在水體中的衰減程度不同,波長越長衰減越快。有研究表明,藍波段的穿透深度最大,約為30 m,綠色波段約為15 m,紅波段約為5 m,近紅外波段的約為0.5 m。沉陷區(qū)水體成分復(fù)雜、渾濁度高,影響可見光在水體中的穿透性。根據(jù)無人船測得數(shù)據(jù)表明,沉陷區(qū)水體最大水深為10.02 m,沉陷水域水深反演模型的建立符合理論。波段選用Sentinel-2中空間分辨率為10 m的B2、B3、B4、B8波段與無人船水深實測值進行相關(guān)性分析,結(jié)果見表1,四個波段均通過了顯著性檢驗。

表1 各波段與組合波段的相關(guān)性分析結(jié)果
從表1可以看出,可見光中B3和B4波段與無人船實測值相關(guān)性較高。利用Sentinel-2中的四個波段對應(yīng)的水體反射率作為自變量,相應(yīng)坐標的無人船水深實測水深為因變量,構(gòu)建的反演模型如表2所示。
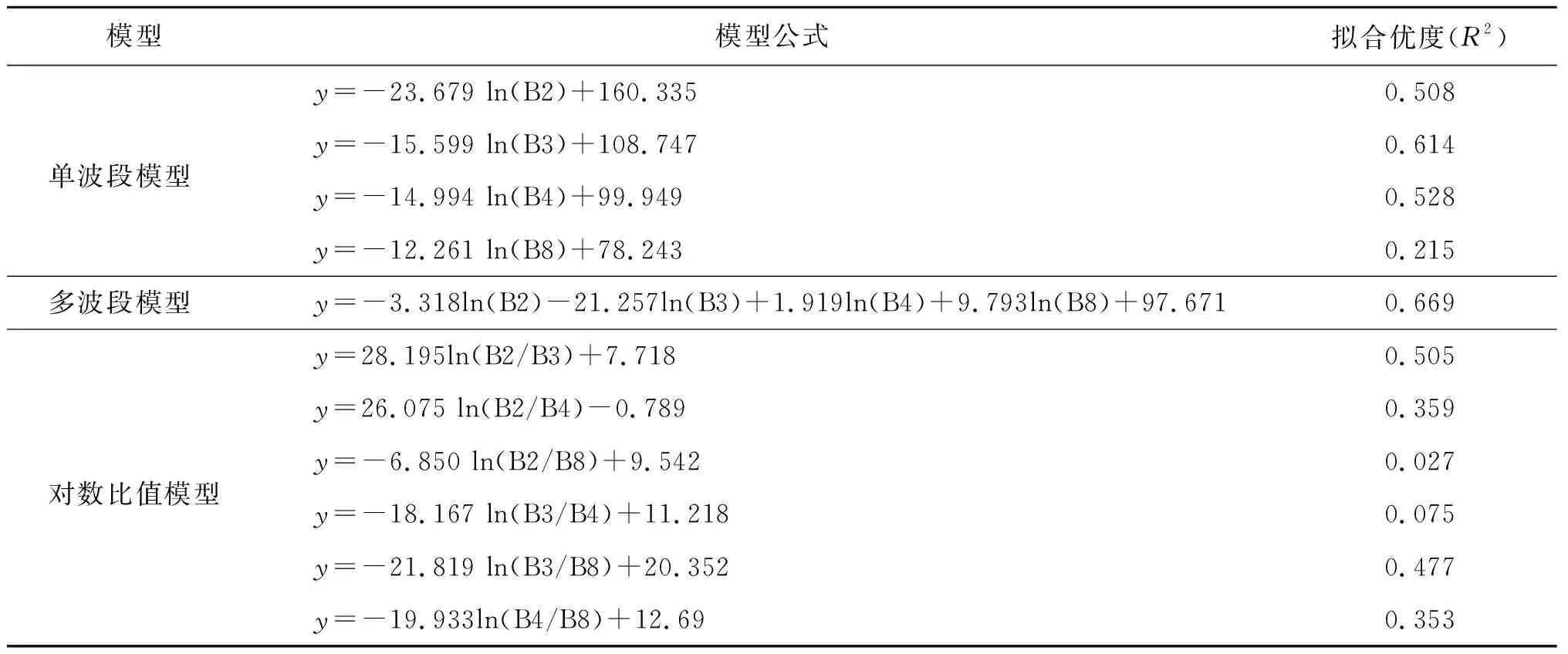
表2 經(jīng)典模型線性模型
從表2可以看出,單波段模型中利用綠色波段的反演模型擬合優(yōu)度最高,為0.614,紅色波段次之,擬合優(yōu)度為0.528。多波段模型的擬合優(yōu)度是全部反演模型中最高的,為0.669。雙波段對數(shù)比值模型中擬合優(yōu)度最高的為藍色波段比綠色波段,擬合優(yōu)度為0.505,綠色波段比全色波段的擬合優(yōu)度次之,為0.477。其他對數(shù)比值模型擬合優(yōu)度不高,說明沉陷區(qū)水體在藍色與綠色波段有更強的特殊性,水產(chǎn)養(yǎng)殖、水草茂密和水下地形復(fù)雜可能為擬合優(yōu)度不佳的主要原因。
4 結(jié)果與討論
在沉陷水域的Sentinel-2衛(wèi)星影像中,利用65個檢驗組數(shù)據(jù)分別對選取出來的單波段模型、多波段模型、對數(shù)比值模型進行精度評價。繪制如圖2所示的模型反演值與實測值一一對應(yīng)的關(guān)系圖。可以看出,經(jīng)典模型0~3 m與6~9 m的離散程度較高,3~6 m區(qū)間擬合效果較好。
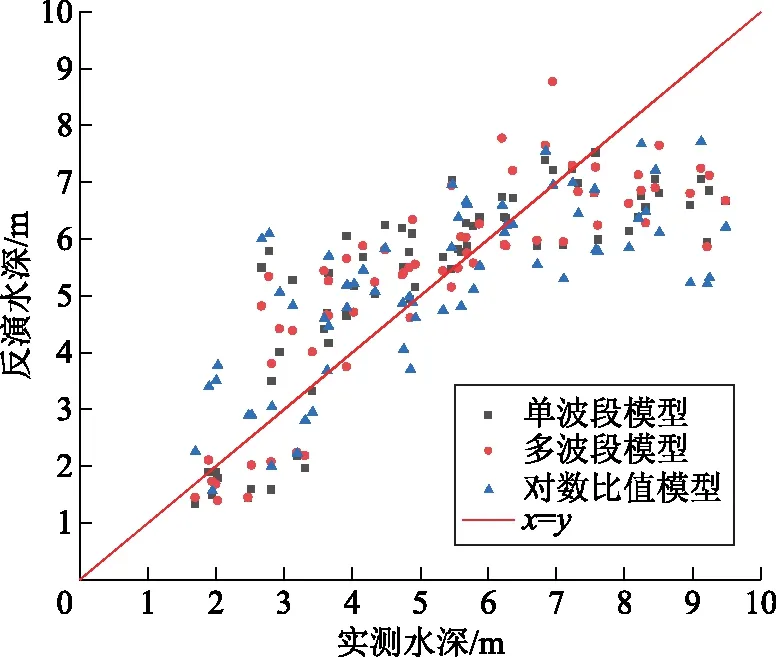
圖2 經(jīng)典模型
為了進一步優(yōu)化水深反演結(jié)果,利用SVM算法對經(jīng)典模型中各自對應(yīng)的最高擬合優(yōu)度的模型進行優(yōu)化。在模型構(gòu)建過程中,將波段輻射亮度值進行對數(shù)處理,保持與經(jīng)典模型相同的自變量。采用SVM算法訓(xùn)練好的單波段模型、多波段模型、對數(shù)比值模型分別對檢驗組進行預(yù)測,繪制如圖3所示的SVM反演模型反演值與實測值一一對應(yīng)的關(guān)系圖。從圖3可以看出,SVM模型反演相對于經(jīng)典模型三種模型的擬合效果都有所提升。反演水深值與實測水深值的離散程度降低,特別是SVM多波段模型在3~6 m區(qū)間擬合效果有所提升。
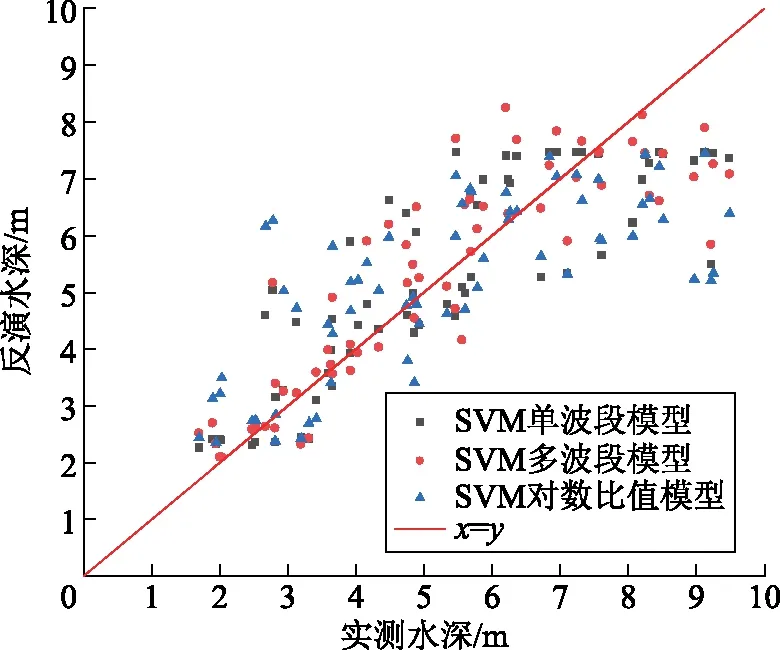
圖3 SVM模型
利用檢驗組實測數(shù)據(jù)對六種模型進行誤差分析,如表3所示,在六種模型中,最優(yōu)的模型出現(xiàn)在SVM多波段模型中,均方根誤差為1.07 m,平均絕對誤差為0.77 m,擬合優(yōu)度為0.759。SVM單波段模型次之,兩種對數(shù)比值模型的精度最差,精度最高的SVM多波段模型相對于精度最差的對數(shù)比值模型均方根誤差提升了0.46 m,平均絕對誤差和擬合優(yōu)度提升的幅度較大,分別為0.4 m、0.242,但是對數(shù)比值模型與經(jīng)典模型的誤差相差不大。
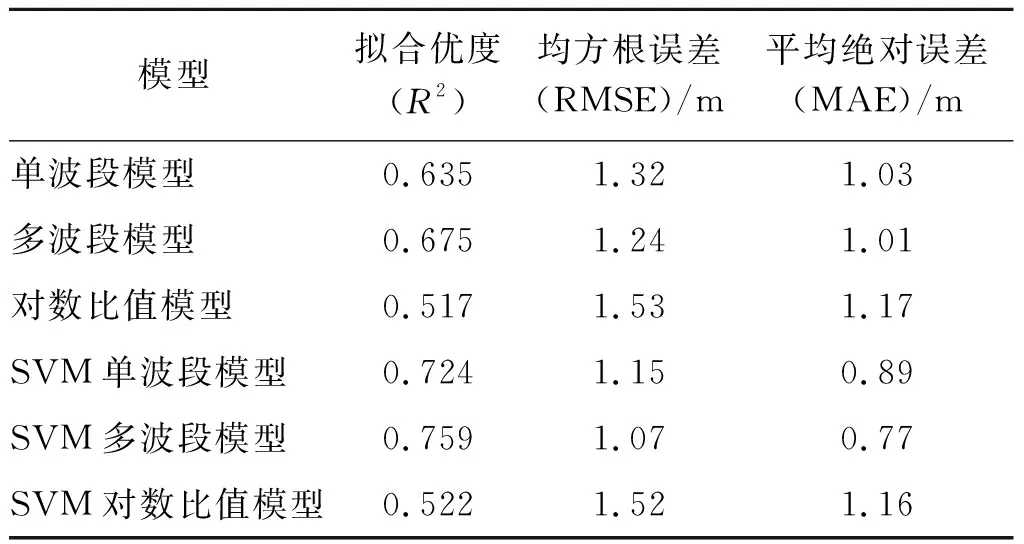
表3 模型的誤差分析
將沉陷區(qū)水域水深分為0~3 m、3~6 m、6~9 m、9~12 m四個深度區(qū)間,如圖4所示,將相應(yīng)區(qū)間的經(jīng)典模型與SVM模型檢驗組反演的RMSE對比分析。可以看出,在四個水深區(qū)間,SVM多波段模型的RMSE最低,為0.798 m,SVM單波段模型的RMSE次之,為0.928 m。在0~3 m深度區(qū)間,相對于3~6 m、6~9 m區(qū)間的RMSE較高,原因是0~3 m區(qū)間屬于沉陷水域近水岸地區(qū),水底底質(zhì)多為水草和人工養(yǎng)殖區(qū),水質(zhì)較差,反演效果不佳。
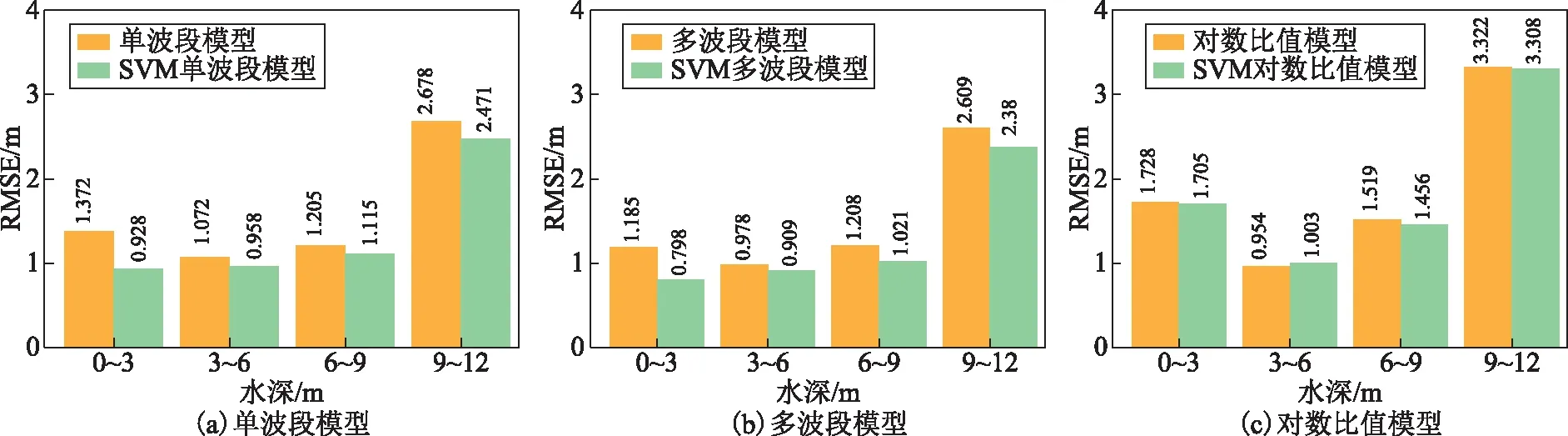
圖4 不同波段模型與不同范圍水深的RMSE對比
然而9~12 m區(qū)間模型精度最差,原因可能是沉陷區(qū)水體中含有建筑物構(gòu)筑物,在無人船測量水深時,測出的水深不足以代表整個10 m×10 m的平均水深。SVM模型在各個深度區(qū)段精度提高不等,0~3 m區(qū)間的單波段模型與多波段模型精度提高較為明顯。3~6 m、6~9 m區(qū)間精度提升不大,原因是該水深段經(jīng)典模型的反演精度較為理想,因此SVM對模型的精度影響較小。
結(jié)果表明,經(jīng)典模型結(jié)合SVM算法反演模型在沉陷區(qū)的水深反演中有更高的精度,可以作為測量沉陷區(qū)水深的一種新型方法,能夠為礦區(qū)沉陷區(qū)的水深變化以及生態(tài)環(huán)境評價提供參考。
5 結(jié)束語
本文根據(jù)Sentinel-2遙感影像數(shù)據(jù)和無人船實測水深數(shù)據(jù),利用單波段模型、多波段模型、對數(shù)比值模型構(gòu)建出各個波段的經(jīng)典模型,對礦區(qū)沉陷水域水深進行反演,篩選得到三種經(jīng)典模型中對應(yīng)擬合優(yōu)度最大的模型,得到結(jié)論如下。
綜合Sentinel-2的四個波段建立三種經(jīng)典模型,多波段模型的擬合優(yōu)度最大(0.669),對數(shù)比值模型的擬合優(yōu)度最小(0.505)。SVM算法結(jié)合經(jīng)典模型在檢驗組的均方根誤差RMSE中,多波段模型的精度最大(1.07 m)優(yōu)于經(jīng)典模型,在0~12 m深度范圍內(nèi),反演精度最高的為SVM多波段模型,RMES分別為0.798、0.909、1.021、2.380 m。本文的所有模型中,SVM多波段模型反演沉陷水體的水深值與實測值偏差較小,反演精度達到一定要求,可以為礦區(qū)沉陷區(qū)水資源利用提供方法參考。
本研究仍存在不足之處,在沉陷區(qū)水體水深方面,由于水體底質(zhì)過去是房屋、農(nóng)田、道路,相鄰水深實測值的變化較大,在與遙感影像輻射亮度值進行一一對應(yīng)時,受限于遙感影像的空間分辨率,在一定程度上影響反演的精度。在后續(xù)的工作中,在保證數(shù)據(jù)精度的條件下,使用更高空間分辨率的多光譜影像數(shù)據(jù)與實測無人船數(shù)據(jù)進行反演研究。對算法模型進行優(yōu)化,減少異常值對模型的干擾,提高多光譜遙感反演精度將是未來工作的方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19