傾斜攝影測量技術在大比例尺地形圖測繪中的應用研究
2022-04-20 06:46:44贠亞杰
科學技術創新 2022年10期
贠亞杰
(三和數碼測繪地理信息技術有限公司,甘肅 天水 741000)
攝影測量技術主要用來生產數字正射影像圖(DOM)、數字高程模型(DEM)和數字線劃圖(DLG),其中DLG 的生產目前方法較多,主要可以分為全野外作業和內外業相結合作業[1]。全野外作業主要是指利用全站儀、GPS-RTK 等實地進行坐標測量,然后內業根據外業采集的坐標和手繪的草圖,按照實際情況進行地形圖的繪制;內外業相結合主要是指內業和外業搭配進行地形圖的生產,常見的有兩種:一是利用攝影測量的方式進行平面坐標的采集,利用GPS-RTK 進行高程點的采集,然后將兩套成果合在一起,得到最終的地形圖;二是利用攝影測量技術,在內業得到符合精度要求的地形圖,這種方式目前生產的地形圖精度參差不齊,很難滿足項目要求[2-4]。針對該方式生產的地形圖精度低的問題,本文提出采用傾斜攝影技術進行大比例尺地形圖的生產,并對成果精度進行檢測。結果表明,按照本文方案生產的地形圖精度可以滿足1:500 地形圖精度要求,可以作為大比例尺地形圖生產的一種方式進行有效推廣使用。
1 傾斜攝影技術
對于測繪工作而言,傾斜攝影技術主要包括傾斜攝影測量技術、傾斜攝影建模軟件和傾斜攝影建模技術三部分。
1.1 傾斜攝影測量技術
利用無人機搭載航攝儀,從空中對地面進行拍攝,獲取影像數據,用于測繪產品的制作被稱為攝影測量技術。攝影測量技術主要分為垂直攝影測量技術和傾斜攝影測量技術,垂直攝影測量是指航攝儀垂直于地面,從上方垂直獲取地面影像數據,由于無人機姿態較差,所以在獲取數據時,并不是真正的垂直,但是其夾角非常小,一般不超過3°;傾斜攝影測量是指航攝儀從多個角度對地面進行影像數據獲取,即在垂直攝影測量的基礎上,又增加了傾斜角度,而且通常傾斜角度在45°左右,這樣才可以獲取角度更全、有用信息更多的影像[5]。
1.2 傾斜攝影建模軟件
是指按照一定的算法,對航攝二維影像進行解算,通過一定的算法得到三維實景模型的軟件,目前這類軟件較多,常見的有美國本特利的ContextCapture(簡稱CC)、SkyLine 公司的PhotoMesh、上海瞰景科技的Smart3D、北京中測智繪的M3D、大疆公司的大疆智圖,根據實際作業可知,這些軟件在空三解算和建模時,從模型精細度、解算所耗時長等方面來說,各有利弊,在作業過程中,搭配使用,才能更好地發揮每個軟件的作用,提升作業效率。
1.3 傾斜攝影建模技術
傾斜攝影建模理論上來說,只要照片具有一定的重疊度,就可以進行建模,但是測繪是要講究坐標系和精度的,因此還需要引入POS 數據,POS 中記錄了相機在空中曝光時的位置和姿態,由于無人機的不穩定性,因此在實際作業中,對POS 數據進行了舍棄。傾斜攝影建模技術是指通過自動或半自動的技術,借助攝影測量算法,對航攝影像數據進行解算,得到具有三維的,能夠按照一定比例尺呈現實際現狀的技術。其主要分為航攝影像數據獲取、空中三角測量解算和可視化三維模型自動構建三部分,其整個作業流程如圖1 所示。
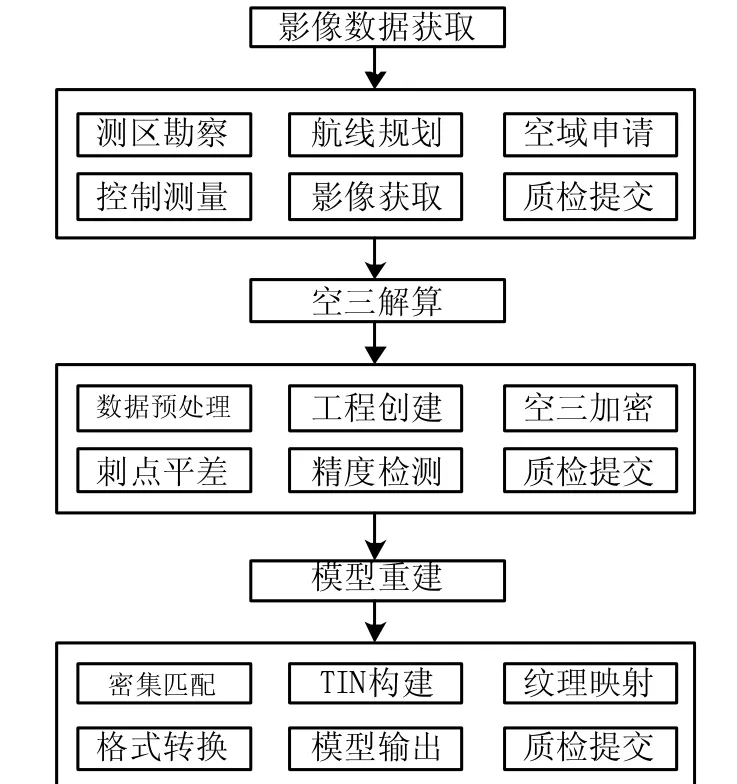
圖1 傾斜攝影建模流程
2 案例分析
本次案例來自于我院承接的城區大比例尺地形圖更新,要求在已有地形圖基礎上,對發生變化的區域進行全要素更新。已有地形圖是采用RTK 全野外作業獲取的,本次作業則采用傾斜攝影技術,目的是通過改變作業方式而提高作業效率,降低生產成本。
2.1 測區概括
項目位于主城區,發生變化的區域主要有住宅區和道路,住宅小區很難進去作業,道路上車輛多,嚴重影響地形圖的更新。測區范圍內地勢整體平坦,但最高建筑約100 米,存在較大的高差。
2.2 無人機選型
針對高差大這一特點,本次作業為了獲取分辨率盡可能相同的影像,采用旋翼機、長焦距、仿地飛行的作業方案。在選擇飛機時,根據不同飛機的特點,選用SH-60X 無人機進行作業,該飛機具有續航時間長,穩定性高的特點,最主要的是該飛控支持仿地飛行作業。為了減小影像的畸變,在相機選擇的時候,選擇下視鏡頭為35mm,側視鏡頭為50mm 的5 拼相機。
2.3 航線規劃
航線規劃質量的高低直接影響后續的航飛結果,在本次作業中,由于采用的是仿地飛行方案,因此進行了兩次航線規劃。首先按照常規飛行模式,以低重疊度的設計,采用固定高度的飛行方式獲取城區影像,然后利用Pix4D 軟件,快速獲取任務區的高精度DSM 數據,然后將其導入WPM 軟件,按照航向85%、旁向85%的重疊度、地面影像分辨率為0.03 米的要求進行仿地航線的規劃。
2.4 控制測量
本次作業未采用差分技術,因此得到的POS 精度較低,為了獲得高精度的地形圖成果,需要進行控制點的采集。首先將任務區范圍線導入圖新地球軟件,按照300米的間距,結合地形,合理均勻的布設大致點位,然后將其導出,并導入手機端的奧維地球中。外業控制點采集人員,根據奧維地球上的位置,規劃采集路線,快速進行控制點位的確定。由于是傾斜攝影,因此對點位的選取是有要求的,要盡可能選在四周空曠的地方,這樣可以減小點位的遮擋,提升控制點轉刺的個數。在點位選擇時,如果無明顯的特征點,則可以采用紅白油漆進行點位噴涂,然后進行坐標采集,如果有特征點,則可以直接采集在特征點上。在點位采集時,對實際點位進行了遠景和近景的拍照,這樣便于內業對點位進行快速準確判定。為了減少偶然誤差帶來的影響,在點位采集時,統一按照每個點位采集3 次,相互較差小于1cm 的要求進行,采集完成后,將成果打包提交到內業。
為了對后期成果精度進行檢測,在采集控制點的同時業采集了部分檢測點。檢測點主要位于整個成果精度薄弱區域。在采集檢測點時,采集了兩種類型的檢測點,即平面檢測點和高程檢測點,平面檢測點全部位于特征點上,共采集了23 個,高程檢測點除了23 個平面檢測點外,還在地形變化較大區域,采集了15 個高程檢測點,即最終為38 個高程檢測點。
2.5 航空攝影作業
為了減少陰影遮擋,提升航攝成果質量,本次作業采集影像時,主要選取在上午十點到下午兩點這段時間內。首先對起飛和將落地進行選取,然后進行起飛前的檢查,主要檢查各部件的牢固性、相機是否正常曝光、內存卡是否可以正常讀寫和電池電量是否達到要求等。在完成一系列的檢查和試拍后,并確保周邊環境安全,進行無人機的起飛作業。在無人機作業過程中,需要通過地面站對無人機飛行狀態進行觀察,確保飛機正常作業,并且在可能發生危險時,可通過手控的方式對飛機的飛行狀況進行控制。作業過程中,無人機嚴格按照已有航線進行航飛作業,共獲取影像數13585 張。通過人機交互的方式對航攝影像成果進行查看,影像質量良好,未出現曝光嚴重、陰影遮擋嚴重等現象,成果可用。對POS 數據進行查看,POS 成果和影像數對應完整,未出現丟POS 值的情況,POS 成果可用。
2.6 實景三維建模
2.6.1 數據預處理
數據預處理主要是為工程創建做準備,預處理主要是更改影像名、對影像進行勻光勻色、整理POS 數據等。由于5 鏡頭數據,一般每個鏡頭獲取的對應影像名字是相同的,這樣不便于進行后期處理,因此需要對影像進行重命名。本次使用拖把更名器對影像進行重命名,重命名后的影像命名都是唯一的。為了提升后期建模成果的質量,這里對影像進行勻光勻色處理。首先選擇一張地物信息豐富,具有代表性的影像,加載到PhotoShop 軟件中,通過對影像亮度、對比度、色調、飽和度等屬性的調節,得到高質量的調色后的影像,并對處理過程進行“動作”記錄,然后按照同樣的方式,對所有影像進行批處理,得到高質量的原始影像。傾斜相機在作業過程中,其POS 數據是通過下視鏡頭的相機來記錄的,前面對5鏡頭影像均進行了更名,因此這里需要對POS 數據進行更名,利用查找替換的方式,快速完成POS 數據的更名,至此,工程創建之前的工作就完成了。
2.6.2 工程創建
工程創建主要是指影像數據、POS 數據和相機參數的導入,本次作業采用CC 軟件。首先新建工程,設置工程名和任務存放路徑,然后通過文件夾的方式,一次性加載所有影像數據和POS 數據,然后將相機報告中的相機焦距,輸入到對應相機的位置上,這樣可以保證后續數據能夠順利解算成功。在工程創建的過程中,不允許使用特殊符號和中文符號,這樣可能會使得后期數據解算出現問題。
2.6.3 空三解算
空三數據的解算,是攝影測量中最關鍵的一步,因為其結果直接影響到后續的成果。首先提交空三任務,然后在主機和輔機上設置引擎作業路徑,最后開啟每臺電腦上的引擎,通過集群作業的方式提高數據解算效率。在數據解算完成后,對其成果進行查看,POS 和實際航飛軌跡符合,匹配出的結果未分層、未彎曲,成果質量整體良好。設置控制點坐標系統,導入控制點,結合實地照片,對控制點進行轉刺,通過目視的方法,對于位于影像邊緣的點位不進行轉刺,待所有的點轉刺完成后,提交平差任務,進行平差調整解算。平差完成后,查看平差報告,所有點位精度均滿足測繪精度要求,成果可用。
2.6.4 模型生產
本次生產模型主要用于后期的地形圖采集,因此在生產模型時,不需要全部生產,只需生產任務線范圍內的即可。首先設置框架系統和空三系統一致,導入建模范圍線,然后瓦片切塊方式選擇平面規則格網,瓦片大小以所有集群電腦內存最小的為標準,本次集群電腦中,內存最小的為24G,因此只需設置瓦片大小為12G左右即可,這樣一來,瓦片大小為80m*80m。為了盡可能保留建構筑物結構,在平面簡化的時候,選擇簡化方式單位為“米”,簡化數值為“0”,這樣就可以保留更多的結構,提高后續采集的精度。實景三維模型格式很多,目前主流的測圖軟件均支持OSGB 格式的模型,因此輸出的模型格式選擇OSGB。待集群輸出模型完成后,對模型的質量進行查看,主要查看模型是否完整,輸出的坐標系是否正確等,通過查看,本次模型成果質量優良,可用性強且精細度良好[6-7]。
2.6.5 地形圖生產
本次地形圖成果要求為2017 圖式,但是已有軟件圖式為2007,為了得到符合要求的成果,后期需要進行地形圖圖式的轉換。首先利用EPS 軟件進行地形圖的采集,在采集的過程中,盡可能采集點位準確,對于規則的四邊形房屋,可以選用五點房命令進行快速繪制,對于無法準確采集的地方,在地形圖上標注明確,外業在進行調繪時會進行補測。采集完成后,利用CASS10 軟件,將2007 圖式轉為2017 圖式,并對轉換不合適的地方進行查看,得到最終符合要求的地形圖。
3 精度統計與分析
成果精度的檢測與評定,是測繪作業中至關重要的一個環節。首先利用采集的平面檢測點,對地形圖成果平面精度進行檢測,檢測結果見表1。
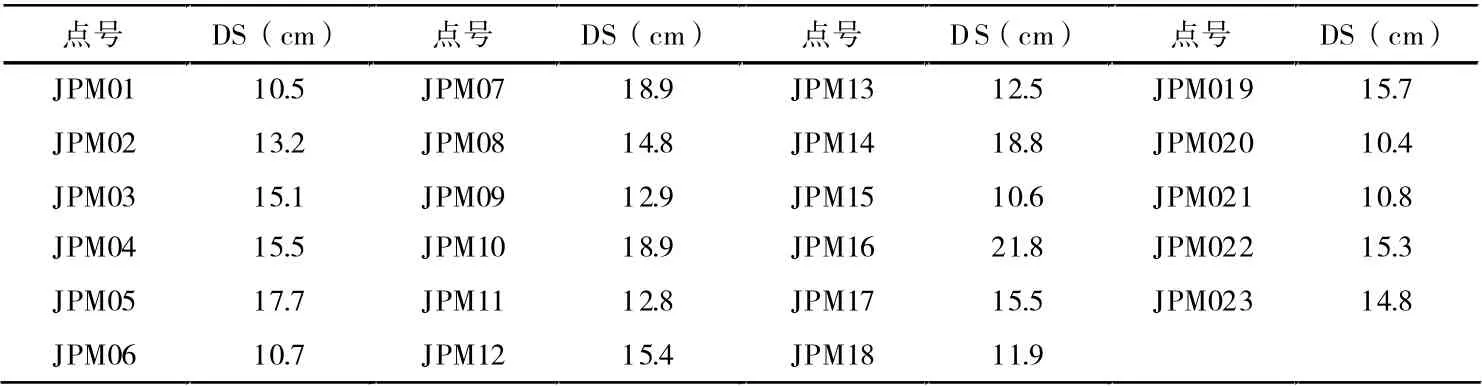
表1 平面精度檢測表
通過表1 可知,本次23 個檢測點中,平面較差最大為21.8cm,小于規范要求;按照同精度中誤差[8]公式計算可得23 個檢測點的平面位置中誤差為0.105 米,可以滿足大比例尺地形圖測繪精度要求。
同理,對38 個高程點精度進行檢測,檢測結果見圖2。
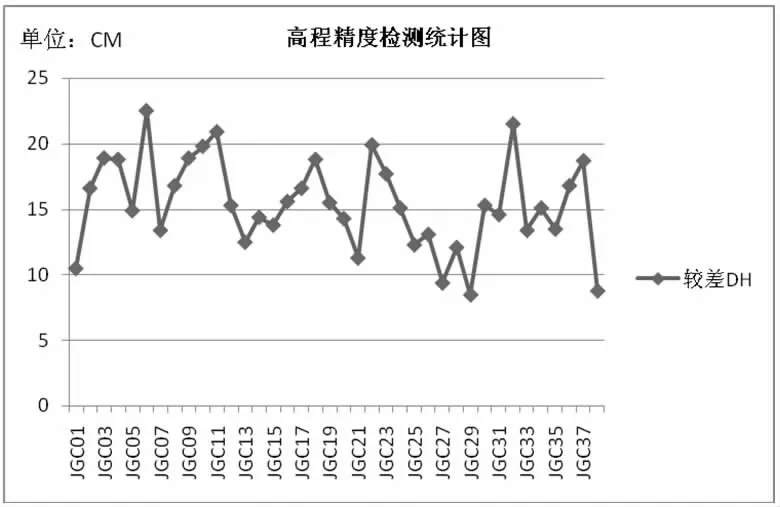
圖2 高程精度檢測統計圖
通過圖2 可知,本次38 個高程檢測點中,較差最大未超過25cm,多數誤差均介于10-20cm 之內,采用算數平均值代替中誤差的方法,本次算數平均值為15.4cm,成果精度良好,能夠滿足本次項目要求。
結束語
城區地形圖測繪,是一項非常重要的測繪內容,為了提高作業效率,降低生產成本,在垂直攝影測量無法滿足項目需求的情況下,本文提出的傾斜攝影作業方案,可以高質量的完成城區1:500 地形圖的生產需求,可以為城區大比例尺地形圖測繪生產帶來參考。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30