基于數字微鏡器件的高分辨率計算全息顯示
2022-04-27 06:21:50桑新柱仲崇力秦秀娟王葵如顏玢玢
液晶與顯示 2022年5期
李 會,桑新柱,仲崇力,秦秀娟,王葵如,顏玢玢
(北京郵電大學 信息光子學與光通信國家重點實驗室,北京100876)
1 引 言
全息顯示技術通過記錄和再現物體的波前來重建具有正確深度信息的三維圖像,可以克服其他三維顯示技術中輻輳-調焦不匹配、人眼視覺疲勞等不足,在教育、軍事、工業、醫療、娛樂等行業中應用廣泛[1]。隨著計算機軟硬件性能的提升和光電器件技術的發展,基于空間光調制器的計算全息顯示成為當前的研究熱點[2-3],可以存儲或顯示虛擬的目標物體,方便進行異地傳輸、遠程連接或實時動態顯示等。
空 間 光 調 制 器(Spatial Light Modulator,SLM)具備數字編碼與動態調控能力,可以替代光學材料來作為全息圖的承載媒介[4-8]。目前應用最為廣泛的空間光調制器分別為硅基液晶(Liquid Crystal on Silicon,LCOS-SLM)與數字微 反 射 鏡 器 件(Digital Micromirror Device,DMD)。硅基液晶SLM 的設計與加工主要是通過液晶排列層中液晶的旋向與入射光的偏振態實現相位或振幅調制。數字微反射鏡器件是由多個小型反射鏡面組成的高速光開關陣列,通過控制微鏡的翻轉頻率實現對入射光場的動態調控。由于空間光調制器都是像素化的調制器件,其調制動態范圍和精度有限,因此計算全息受到光電器件參數(例如器件像素大小和總體尺寸)和計算負荷等的影響[9],很難實現高分辨率、大尺寸的動態全息顯示。
巨大計算負荷與光電器件參數是高分辨率大尺寸計算全息顯示亟需解決的重要問題。高分辨率全息圖可通過投影曝光、激光直寫和電子束刻蝕等方法進行輸出組合拼接。全息圖分塊計算是解決大尺寸、高分辨率全息計算的主要方法[10-11]。清華大學曹良才團隊將全息圖分割為多個塊單元,利用每一塊全息圖中心點所對應視場角下的3D 數據計算該單元全息圖。該方法實現了尺寸為20 mm×20 mm、分辨率為20 000 pixel×20 000 pixel的全息圖,對應的計算時間為32.9 h。浙江師范大學將集成成像3D 顯示中的光場圖像渲染與全息編碼相結合[12-14],對高分辨率全息圖進行了計算,實現了尺寸為64 mm×64 mm、分辨率為200 000 pixel×200 000 pixel 的全息圖,對應的計算時間為37 min。基于頻域融合的高分辨率全息算法,實現了高分辨率的全視差像面全息(尺寸為30 mm×30 mm,分辨率為94 340 pixel×94 340 pixel)、彩色彩虹全息(尺寸為30 mm×30 mm,分辨率為94 340 pixel×94 340 pixel)和半周視彩色彩虹全息(尺寸為47 mm×47 mm,分辨率為84 000 pixel×84 000 pixel),所需要的計算時間分別為72 min、25 min 和4 h[14-16]。
為了能夠實現更加豐富的全息3D 顯示效果,除了上述高分辨率全息圖實現靜態三維顯示的方法外,還有高分辨率多視點動態全息計算方法[17],即當人眼的觀看位置變化時,可看到連續變化的3D 圖像。北京理工大學分析了三維圖像放大中畸變的原因,實現了動態全息投影中三維圖像的無畸變放大[18]。然而,目前常見的SLM只有2K 或4K 的像素數,視窗大小只有2 cm。多個研究團隊對大尺寸全息顯示進行的探索工作都是借助于透鏡或針孔陣列對顯示圖像進行的直接放大或全息面像素數的提升,沒有真正實現高分辨率物面像素的增加。
本文針對全息圖局部信息可完整再現物面信息的特性,提出了一種基于數字微鏡器件的高分辨率、大尺寸全息顯示方法。首先對目標圖像預處理,進行分辨率提升或利用計算機直接渲染出高分辨率物面。其次將高分辨率物面進行基于快速傅里葉變換的菲涅爾衍射并行計算,生成高分辨率全息圖。然后建立DMD 時間序列、子全息圖序列與高分辨率全息圖像空間序列的映射關系,從而進行計算圖像序列與對應全息顯示的動態融合。實驗證明,提出方法克服了光電器件的像素數目和總體尺寸的影響,利用快速傅里葉變換等并行計算方法大幅縮小了高分辨率計算全息顯示的計算時間。當加載不同時間序列的子全息圖時均可達到高分辨率重建,根據人眼的視覺暫留效應,可以觀察到清晰的高分辨率、大尺寸再現像。
2 原 理
2.1 基于菲涅爾衍射的全息圖分辨率提升
常用的DMD 顯示分辨率只能達到2K,為了實現更高分辨率的全息再現效果,本文提出了基于菲涅爾衍射的分辨率提升算法。如圖1 所示,物空間坐標系為(xo,yo,z),三維場景被分割為j個與全息面平行的二維圖像。第j個二維圖像Ij衍射傳播到距離為zj的全息面,其復振幅分布Uj(xh,yh,zj)為:

圖1 基于菲涅爾衍射的計算全息圖生成原理Fig.1 Principle of CGH generation based on Fresnel dif fraction
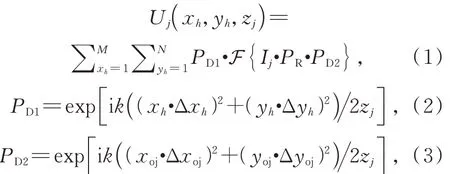
其中k為波數,PR為隨機相位,PD1與PD2均為二次相位因子。Δxh、Δyh分別為全息面在水平和垂直方向的像素間距,Δxoj、Δyoj分別為物面在水平和垂直方向的像素間距,M和N分別為全息面在水平和垂直方向的像素總數,F 為快速傅里葉變換運算。整個物體衍射到全息面的復振幅分布則為:

其中zj和zj-1的間距為Δd。
將分辨率為M×N的原始物面Ij經過R變換后得到分辨率為pM×qN的其中R變換為針對低分辨率物面信息的分辨率提升算法,可以直接使用計算機渲染生成高分辨率物面信息,或使用深度學習等方法得到不同需求分辨率的物面像素數。

2.2 基于時空復用方法的高分辨率再現像全息顯示
為了實現高分辨率全息顯示,設計了基于DMD 特征的時空復用方法。以8K 再現像為例,建立了DMD 時間序列、子全息圖序列與高分辨率全息圖像空間序列的映射關系。如圖2(a)所示,將8K 全息圖平面采用等分空間的方式進行S變換相移得到動態子全息圖序列,其中t為子全息圖序列對應幀數。根據全息圖的衍射特性,局部全息圖仍可以再現整幅再現像,任意時刻的子全息圖均可再現高分辨率目標圖像。如圖2(b)所示,再現過程中會出現隨機相位噪聲等問題,根據人眼的視覺暫留效應,當加載不同時間序列的子全息圖時均可達到高分辨率重建,因此動態融合后可以抑制隨機相位帶來的噪聲問題,達到更適合人眼觀看的清晰高分辨率、大尺寸再現效果。

圖2 基于時空復用技術的高分辨率8K 全息顯示原理Fig.2 Principle of high-resolution 8K holographic display based on space-time multiplexing technology
圖3 為提出方法的流程示意圖。首先對目標圖像R變換,進行分辨率提升或利用計算機直接渲染出高分辨率物面信息。其次將高分辨率物面進行基于快速傅里葉變換的菲涅爾衍射并行計算,生成高分辨率全息圖后進行S變換。然后建立DMD 時間序列、子全息圖序列與高分辨率全息圖像空間序列的映射關系,從而進行計算圖像序列與對應全息顯示的動態融合高分辨率再現。

圖3 方法流程示意圖Fig.3 Method flow diagram
當3D 圖像連續變化時,利用光線跟蹤技術可以實現交互式動態全息顯示[19]。圖4 為動態全息顯示的方法示意圖。不同時刻或不同角度的高分辨率物面進行實時衍射計算生成動態高分辨率全息圖像,將高分辨率全息圖像S變換后得到DMD 匹配時刻的子全息圖,從而實現高分辨率動態全息顯示。

圖4 高分辨率動態全息顯示方法Fig.4 High-resolution dynamic holographic display method
3 實 驗
根據提出方法對顯示效果進行了實驗設計,光路圖如圖5 所示。實驗中使用了分辨率為2K、像素間距為7.56 μm 的DMD,使用了3 個反射鏡、一個電子快門和一套擴束準直系統。照明光源被DMD 的驅動板直接控制,波長為630 nm。

圖5 實驗光路圖Fig.5 Experimental optical path diagram
實驗首先對靜態二維高分辨率全息顯示進行了驗證。如圖6 所示,通過計算機渲染生成了7 680 pixel×4 320 pixel 的高分辨率物面信息,利用菲涅爾衍射并行算法得到了7 680 pixel×4 320 pixel 的高分辨率全息圖像,S變換后得到了1 920 pixel×1 080 pixel 的子全息圖序列。使用像素數為1 920 pixel ×1 080 pixel 的DMD,距其1 000 mm 的位置成功再現了長度為82 mm 的高分辨率物體圖像。

圖6 靜態二維高分辨率全息顯示Fig.6 Static two-dimensional high-resolution holograph ic display
其次對靜態三維高分辨率全息顯示進行了驗證,如圖7 所示。通過光線跟蹤技術渲染生成了高分辨率物面強度信息和深度信息,利用和菲涅爾衍射并行算法得到了高分辨率全息圖像,S變換后得到了對應需求的子全息圖序列。使用像素數為1 920 pixel×1 080 pixel 的DMD,距其950~1 050 mm 的位置成功再現了三維高分辨率物體圖像。前中后3 層的聚焦信息明顯不同說明了實驗的有效性。

圖7 靜態三維高分辨率全息顯示Fig.7 Static three-dimensional high-resolution holographic display
最后對動態三維高分辨率全息顯示進行了數值實驗驗證,如圖8 所示。通過計算機渲染生成了不同角度的高分辨率物面強度信息和深度信息,基于光線跟蹤技術和菲涅爾衍射并行算法得到高分辨率全息圖像。利用USB 傳輸的三維顯示引擎配合DMD 的高刷新率可以實現子全息圖序列動態融合,從而實現抑制噪聲的動態三維高分辨率物體圖像。當使用DVI(Digital Video Interface)接口傳輸數據時,在引擎內部利用FPGA 的高速處理能力還可以實現實時交互式三維動態顯示[20]。

圖8 動態三維高分辨率全息顯示Fig. 8 Dynamic three-dimensional high-resolution holographic display
4 結 論
本文提出了一種基于數字微鏡器件的高分辨率計算全息顯示方法,突破了數字微鏡器件固有的像素數目及分辨率限制,實現了高分辨率、大尺寸全息顯示。該方法相對于已有的高分辨率全息再現方法,無須進行空間光調制器拼接,降低了系統復雜度,并且可以縮小物面采樣間距,提升了光電器件衍射計算時的空間帶寬,對于全息顯示技術的發展有一定的應用價值。