國能朔黃鐵路交直混編1.6萬噸列車平穩操縱分析
2022-04-29 06:22:34周鵬飛
運輸經理世界 2022年18期
關鍵詞:交流
周鵬飛
(國能朔黃鐵路機輛分公司,河北 肅寧 062300)
0 引言
為應對運量持續高位運行,提高重載組合列車編組靈活性,提高機車車輛周轉效率,朔黃鐵路公司先后對交、直流機車互聯互通性能進行了20 余項優化,并邀請專業機構進行了重載組合列車動力學性能試驗,實現了交流機車與直流機車互聯互通、C80 型車體萬噸列車與C64 或C70 型車體普通貨物列車混編,緩解神池南站“咽喉”區段接發車能力緊張的壓力。
1 交直混編1.6 萬噸列車開行現狀
1.1 列車編組方式
HXD1交流機車+108 輛C80 重 車+SS4B直流機車+66 輛C64 或C70 重車+可控列尾。總重16542t、輛數174 輛、計長198.0m。
1.2 線路運行條件
朔黃線西起山西省神池縣神池南站,與神朔鐵路相連,東至河北省滄州市黃驊港口貨場。正線總長近598km,主要特點是橋隧相連、海拔落差大、曲線半徑小,寧武西—原平南、南灣—小覺區段,是10~12‰的連續長大下坡道。最高海拔1543m(見圖1),連續下坡道近143km 含R500 曲線11 處,全線合計77 個隧道,238 座橋梁。
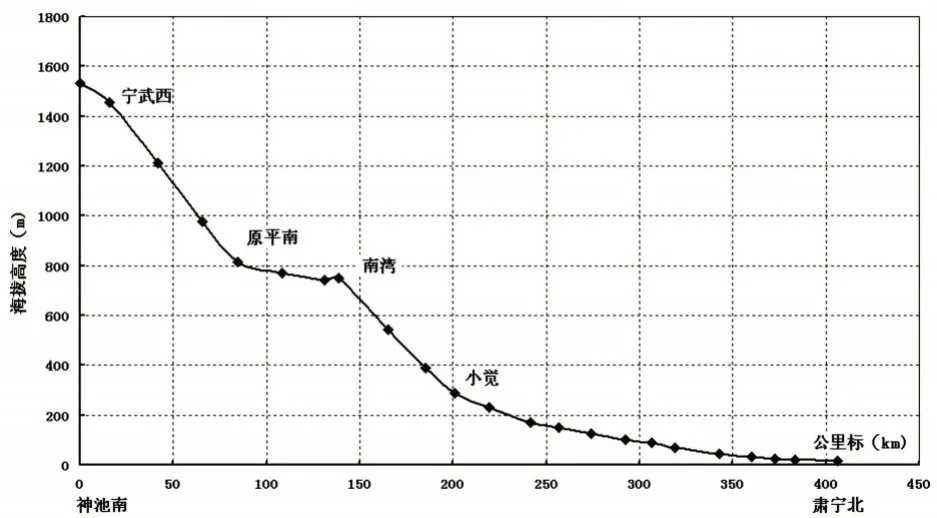
圖1 朔黃線海拔落差圖
1.3 交、直流機車設備梳理
1.3.1 基于LTE-R 4G 無線網絡平臺并搭載無線遠程重聯同步控制系統TEC-TROMS03。
1.3.2 交流機車搭載DK-2 型制動機,直流機車搭載DK-1 改型制動機。
1.3.3 交流機車搭載JD160 型電機,直流機車搭載ZD114-A 型電機。
2 交直混編1.6 萬噸列車操縱突出風險點
2.1 機車動力學評定標準
參照機車車輛運行安全性的現行有關標準,并借鑒以往重載列車試驗中對從控機車的動力學性能控制指標,確定機車運行安全性參數的限度值如下。
脫軌系數:≤0.90;
輪重減載率:≤0.65;
輪軸橫向力:≤1099kN(HXD1 型機車)、≤90kN(SS4型機車);
最大車鉤力:≤2250kN;
車鉤偏轉角:≤6。
2.2 交直流機車同步性的差異
在直流機車牽引風機和制動風機在未啟動的條件下,交流機車從0 位開始進行級位調整時,由于風機起動需要一定時間,使得直流機車級位調整存在6s延時,影響主從機車牽引、再生力發揮的一致性。
2.3 列車車鉤受力分析
列車在長大下坡道停車后重新起動前,由于中部機車前后的車輛緩解較快,第45 位附近的車輛緩解較慢,緩解后的車輛受重力作用下滑,與未緩解的車輛產生擠壓現象,形成了很大的壓鉤力,最大壓鉤力的位置在第23 位和45 位貨車(見圖2),最大值分別為1213kN 和1149kN(見表1)。

表1 下坡道起動各斷面最大車鉤力
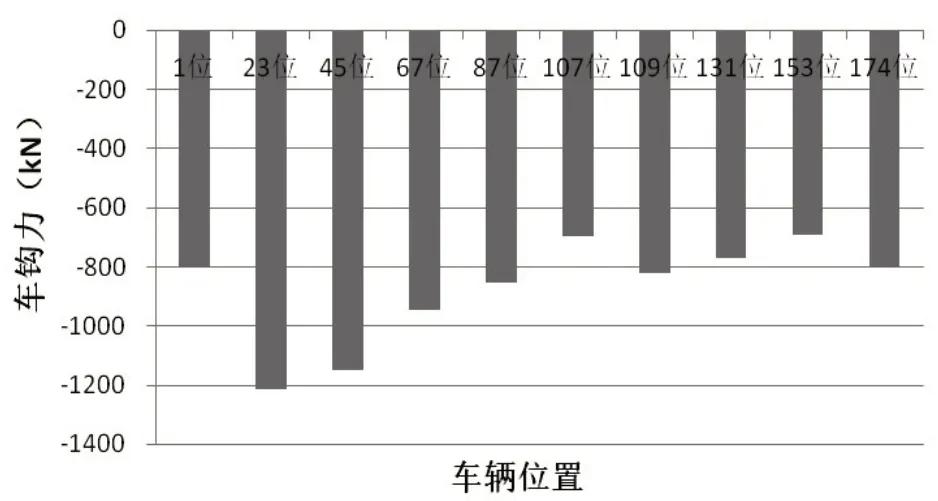
圖2 下坡道起動各斷面最大車鉤力
2.4 小曲線半徑對列車受力的影響
列車在線路最小曲線半徑R400m 施加450kN 的再生力,各個車輛車鉤均產生不斷程度的壓鉤力。其中,第1 位及第109 位車輛壓鉤力均在500kN 以上。列車在小曲線半徑及道岔側向運行時,車鉤偏轉角最大5.1,接近≤6的安全值(見表2)。
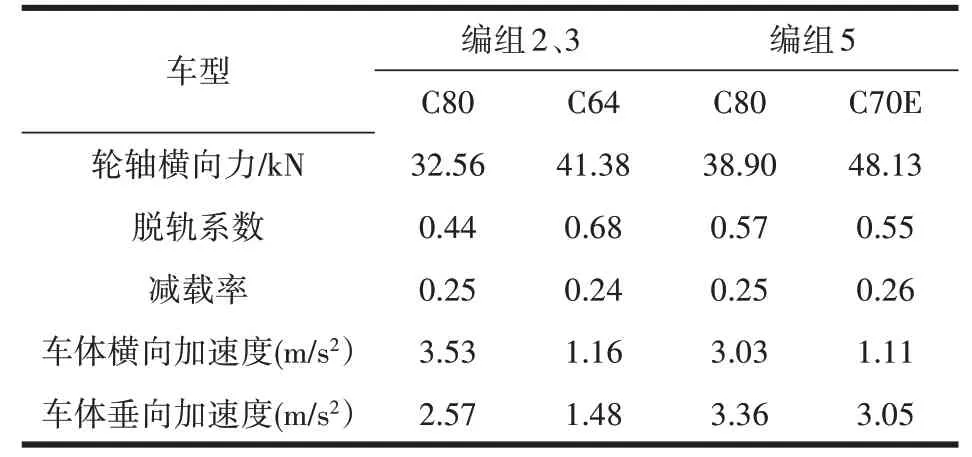
表2 列車輪軸橫向力及輪重減載率與脫軌系數關系表
2.5 可控列尾裝置對列車受力的影響
列車尾部掛可控列尾,長大下坡道循環制動緩解時會產生600~800kN 車鉤力。制動時會產生明顯的拉鉤力,最大值在中部機車前后,出現在主控機車減壓減23min 左右。當制動緩解后,從控機車壓鉤力逐漸增大,大約30min 后達到峰值。
2.6 非長大下坡道如何提升列車運行品質分析
列車在平直坡道上發生緊急制動,中部機車車鉤受力均在1000kN 以上,高于≤1000kN 的建議性評定指標,存在較大的安全隱患。實施常用制動減壓緩解過程中有明顯的拉鉤力,應避開凸形坡道(4‰上坡道轉4‰下坡道),提升1.6 萬噸列車運行品質。
2.7 斷鉤、分離易造成事故擴大
列車運行中后半列發生斷鉤、分離,機車能響應緊急制動;但即使在通訊正常時,從控機車起緊急后,制動作用僅通過列車管傳遞,而不通過無線同步裝置傳遞,傳遞速度較慢。
3 混編列車突出風險應對措施
3.1 轉變傳統操縱觀念
倡導以空氣制動為主、動力制動為輔、實現超長波浪循環制動,最大程度減少空氣制動的頻次,減少列車縱向力發生頻次,保證混編列車運行安全。
3.2 推行模式化操縱理念
以小曲線半徑、線路變坡點、過分相操縱為切入點,積極探索最優操縱方案,遵循精細化操縱原則,固化每把閘制動緩解地點,設定再生力發揮限值,進行語音在線預警,最大程度避免違章操縱,將列車車鉤受力降至最低。
3.3 避免列車惰力運行
全列車鉤處于自由狀態或在起伏坡道上運行時,在壓縮和拉伸兩者狀態間相互轉換,惰力運行引起的沖動也較為突出,應盡量避免。
3.4 規范列車起停操縱
充分考慮機車特性差異,細化牽引、再生力使用標準,確保全列車車鉤充分拉伸或壓縮后逐步增大,兼顧運行速度及列車平穩,最大程度維持車鉤受力狀態。
3.5 嚴格制動機使用標準
以《機車操縱規程》第二十八條為基礎,督促機車乘務員養成良好的制動機使用習慣,嚴格卡控未排風結束追加減壓或連續追加減壓等問題的發生,避免充風不足制動的產生。
3.6 提升兩非處置能力
利用模擬駕駛培訓,再現乘務員線上運行可能發生的非正常情況,通過兩非訓練不斷固化乘務員非正常情況下的應急反應,避免操縱不當導致事態擴大。
3.7 規范列尾裝置摘掛
細化列尾裝置摘掛標準,完善作業流程圖,制定防脫落冗余設施,確保列尾主機、風管可靠固定,避免發生封堵、風管、主機脫落列車緊急制動傳遞較慢,引發列車顛覆性事故。
4 交直混編1.6 萬噸列車操縱原則
4.1 站內起車
交流機車牽引力初步加載50~200kN(直流機車0~400A)不小于10s,起動過程中預防性撒砂,防止空轉,全列起動后平穩加速,進入岔區適當減小牽引力,避免空轉。
4.2 上坡起車
停車前增大機車制動缸壓力,充分壓縮車鉤,停車后追加至100kPa,為起車做好準備。起車時,交流機車先給牽引力至400kN(直流機車600A),再緩解列車,逐步發揮機車最大牽引力,執行坡道起車操縱辦法,確保一次起動成功。
4.3 下坡起車
停車前,適當壓縮車鉤,動車前,交流機車先緩解大閘,動車后待速度上漲至5km/h,逐步增大再生力至目標值,并逐步將機車制動缸壓力緩解至零,根據漲速情況,合理調整再生力,確保再制動充風時間。直流機車先緩解小閘,施加電制動,待勵磁電流上升后,再緩解大閘,逐步增大電制電流至目標值。
4.4 平原區段操縱
列車運行在起伏坡道時,盡量采取低手柄通過變坡點,應根據線路縱斷面情況使整列車鉤保持穩定狀態,減少列車縱向沖動。
4.5 長大上坡道操縱
4.5.1 采用“先闖后爬,闖爬結合”的操縱辦法。坡道前達速運行并充分發揮機車最大牽引力,爬坡時應施行預防撒砂,防止空轉損失牽引力造成坡停。
4.5.2 停車為起車做準備,停車減壓速度不得低于10km/h。
4.6 長大下坡道操縱
4.6.1 長大下坡道以“空電聯合、長波浪制動”為基本操縱原則。采用空電聯合制動,在滿足列車管充風時間的前提下,最大限度地減少空氣制動頻次和動力制動力,以減小列車縱向力,滿足循環制動和按圖行車要求,確保列車安全、正點。
4.6.2 循環制動區段操縱要求:
(1)減壓前,交流機車再生力不得低于100kN(直流機車電制電流不低于300A)。
(2)減壓后,待速度穩定,適當調節動力制動,延長列車制動距離,實現長波浪制動,減少空氣制動頻次。
(3)緩解前,穩定動力制動10s 以上,壓縮車鉤。
(4)緩解后,動力制動保持25s 以上,再緩慢調整至目標值。
(5)在保證安全的前提下,提高制動初速;滿足列車充風要求的前提下,提高緩解速度。
(6)循環制動過程中,合理利用再生制動力調整列車緩解地點,減少追加減壓頻次,以降低列車縱向受力。
(7)神池南—原平南、南灣—西柏坡區段,循環制動交流機車緩解再生力保持200~400kN(直流機車400~700A)。
4.7 通過分相區操縱
4.7.1 平原區段過分相,根據分相位置提前斷電,交直模式優先采用手柄小零位過分相,直直模式采用手柄回零過分相。
4.7.2 上坡道過分相,交直模式根據分相位置將牽引力緩慢降至200kN 以內,帶級位過分相,待從控機車越過分相正常投入后,再逐步給至目標值(遇特殊情況過分相后牽引力可給至300kN);直直模式手柄回零過分相,主車過分相后電流不超400A,待從控機車越過分相正常投入后,再逐步給至目標值(遇特殊情況過分相后牽引力可給至600A)。
4.7.3 下坡道使用帶閘過分相(遇車體制動力強,可采用惰力過分相)時,交直模式優先使用手柄小零位過分相,因控速困難,需要使用再生制動時,以不超過200kN 為宜;直直模式手柄回零過分相。
4.8 長大下坡道區段過限速操縱
4.8.1 限速45~60km/h 的長大下坡道區段,采取停車緩風措施通過慢行。
4.8.2 限速區段內停車后可不追加減壓,密切監視列車動態。
4.9 停車操縱
4.9.1 站內停車時,合理控制速度,適時投入空氣制動,避免追加減壓或大減壓量停車,列車靠標停妥后追加減壓至100kPa 以上。
4.9.2 區間停車(慢行、側線除外),立即追加至100kPa 以上。
5 結語
交直混編1.6 萬噸列車操縱不同于交交編組2 萬噸列車和直直編組萬噸列車,不僅要克服重載列車縱向力、下滑力等帶來的操縱困難,還要面對不同機型不同特性差異帶來的挑戰。2020年7月至今,機輛分公司對1.6 萬列車制動力判斷及制動周期進行充分摸索,結合動靜態試驗數據從小曲線半徑、分相位置、變坡點操縱等方面進行逐步優化,形成了一套模式化操縱提示,保障了1.6 萬噸列車的平穩開行。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58