TSTCBTC2.0信號系統特點及應用
2022-04-29 06:22:50劉義強
運輸經理世界 2022年18期
關鍵詞:系統
劉義強
(上海電氣泰雷茲交通自動化系統有限公司,上海 200000)
1 CBTC2.0 開發背景
地鐵在運營過程中,會因區域控制設備故障或者車地通信故障,導致大面積的列車需要降級為點式模式運營。系統在降級過程中,從故障識別,應急處置,到故障恢復,導致部分列車至少停在區間半小時,容易引起乘客恐慌。同時,在后續降級點式模式下運營間隔將大幅度增大,影響運營效率。CBTC2.0 則采用雙套CBTC 系統,不再用降級點式作為后備運營模式,當單套區域控制設備故障時,不再對運營產生任何影響,提高運營效率。
2 CBTC2.0 產品特點
2.1 最大程度地保證系統可用性
CBTC2.0 所有子系統均采用相互獨立的雙子系統,雙子系統獨立工作,不互相依賴,同時雙子系統又相互冗余,可以無縫切換,系統單套故障可由備用CBTC 系統繼續維護列車自動防護(Automatic Train Protection,簡稱ATP)模式/列車自動駕駛(Automatic Train Operation,簡稱ATO)模式,可以認為是以CBTC 作為CBTC 的后備。因此傳統的聯鎖點式后備不再需要,從而不再依賴軌旁信號機及計軸區段狀態,極大減少維護工作以及維護難度。
2.2 列控/聯鎖一體化,精簡點式后備,提高安全性
通過區域控制與聯鎖集成,突破了傳統聯鎖疊加列車自動防護系統中,聯鎖系統固有對系統性能的限制,減少中間接口,加快系統響應時間。同時,依舊契合中國聯鎖功能標準和要求,貼近城市軌道未來發展趨勢車車通信減設備的目標。
2.3 以車為本,以資源為中心,保持高自動化模式運行,支持全自動無人駕駛
設計在軌旁資源分配上關聯到列車,一車一進路,對于調度操作上會更加安全、靈活,以車為本的特點與車車通信系統的以車為中心的控制理念更加貼近。
2.4 高性能,雙向ATP/ATO 運營
CBTC 模式不依賴于聯鎖進路,信號機可以在任意地點任意方向運行,靈活換端,并提供全方位的列車ATP 防護。這個設計可以有效避免當列車前方發生不可控災難時,不會因為沒有反向的聯鎖進路導致列車無法反向安全運行,可以保證列車快速安全地運行至安全區域。
3 CBTC2.0 移動閉塞的原理
3.1 列車定位
列車的定位分為一級定位和二級定位。一級定位是通過安裝在軌旁的定位信標以及車載控制單元(Vehicle Control Unit,簡稱VCU)測速測距系統來實現的。通過連續的通過兩個定位信標來確定列車位置以及運行方向且時時更新列車位置,通過區間分布的校準信標不斷校準、更新列車的輪徑。二級定位則是通過安裝在軌旁的計軸檢測點來實現的,是實現固定閉塞的基礎,對于CBTC2.0 系統只有當列車失去通信時,才采用二級定位來判斷列車位置。
對于靜止或者運行的通信列車來說,雖然車身長度固定,但實時的位置是通過列車速度傳感器以及軌旁布置的定位信標計算得到的,必然存在較小的誤差。同時列車存在潛在的倒溜以及預期的列車到達的位置。所以在計算列車移動授權時需要計算列車的包絡,以整個包絡作為列車目前的位置如圖1 所示。
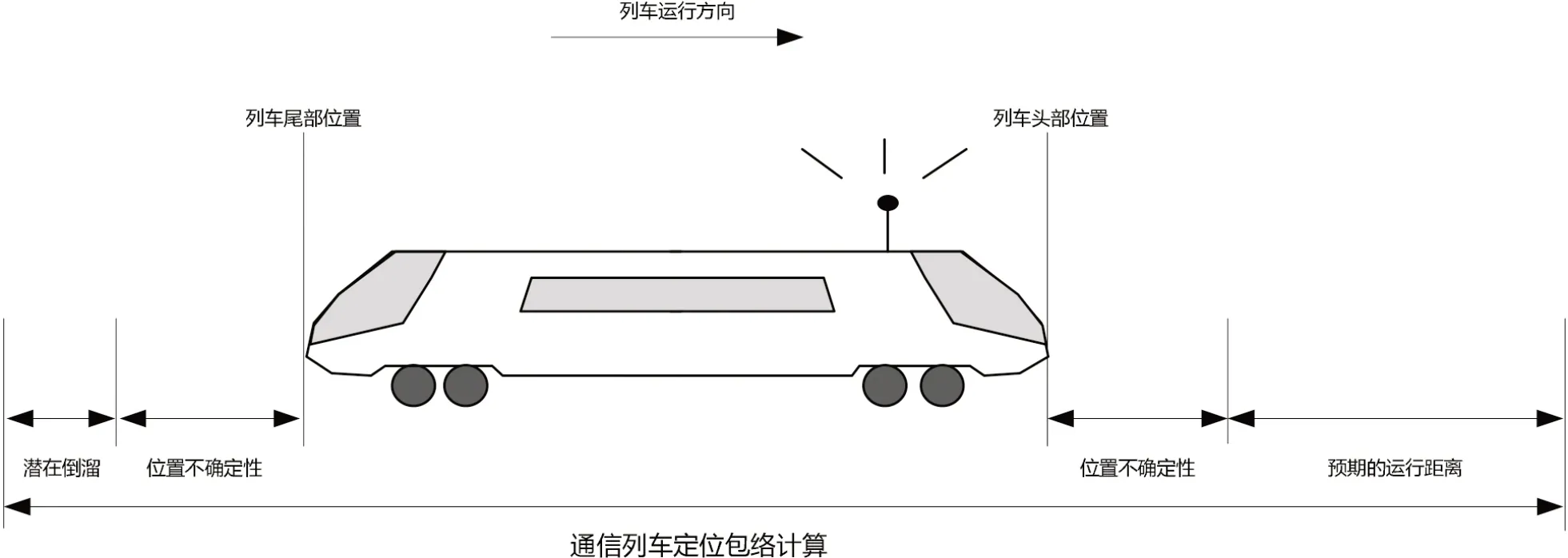
圖1 列車定位包絡計算
對于靜止或者運行的非通信列車來說,列車在斷通信后60s,系統就會定義列車為非通信障礙物(Non Communication Obstacle,簡稱NCO)。與通信列車包絡相比,如果非通信列車包絡相鄰的區段是非空閑狀態時,由于無法判斷非通信列車是否在運動,所以非通信的車包絡會延伸到相鄰非空閑區段,在計算移動授權時系統會將整個包絡作為非通信車的位置。
3.2 進路排列
CBTC2.0 進路排列的方式是以車為本,列車自動監督系統(Automatic Train Supervision,簡稱ATS)把進路請求發給軌旁移動授權單元(Movement Control Unit,簡稱MCU)。進路的請求主要包括:路徑ID、方向、列車ID、進路起點以及目的地。MCU 會確認進路請求的有效性并提供移動授權。對于通信列車授權進路會基于列車位置逐段解鎖,而對于非通信列車授權進路則基于區段占用/出清解鎖。對于日常運營中分配了班次或運行線的列車,列車到達目的地或者進路觸發位置,ATS 將發出新的進路請求給MCU。
3.3 移動授權
CBTC2.0 支持通信列車、裝備故障列車及非裝備列車混合運營。受控列車具備連續的列車自動防護ATP/ATO,遵循移動閉塞原則行車。非受控車具備點式列車自動防護(Intermittent ATP, 簡稱IATP),根據軌旁信號機顯示遵循固定閉塞原則行車。
對于移動閉塞來說,允許列車以ATP/ATO 模式進入的區域即為列車的移動授權(Limited Movement Authorization,簡稱LMA),LMA 終端將根據當前運行方向前方的第一個障礙物進行定義,障礙物的類型可以是通信/非通信的列車,其他列車的LMA,占用的軌道區段或沒在要求位置上的道岔。
移動授權的實現的過程如圖2 所示。首先,ATS為列車請求到車站的進路并發送進路給軌旁的移動授權單元MCU。其次,MCU 鎖閉進路中的道岔,并預留列車到車站的進路或到最近的障礙物的進路。最后,MCU 計算移動授權LMA、開放信號機,并發送給列車。
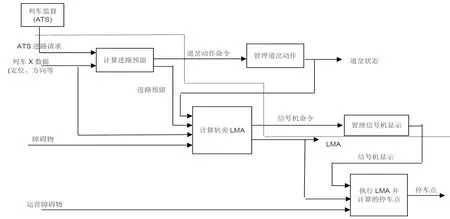
圖2 移動授權過程圖例
4 CBTC2.0 移動授權的應用場景
4.1 應用場景1:LMA 的基本場景
給停放在站臺A 的列車1 排列一條ATS 進路到站臺B,軌旁MCU 通過控制軌旁設備控制單元(Equipment Control Unit,簡稱ECU)輸出信號命令將列車前方的信號機的綠燈繼電器驅起,使信號機顯示綠色允許信號。列車壓過綠燈信號機后,MCU 再通過ECU 將信號機變為禁止信號,當列車車尾離開信號機超過50m 后,如果后續列車再有信號請求,則MCU 會根據ATS 請求以及軌旁資源重新開放信號機信號。當列車繼續前進至ATS 進路終端后,ATS 進路請求、MCU 預留的保護進路以及LMA 會自動解鎖移除(見圖3、圖4)。
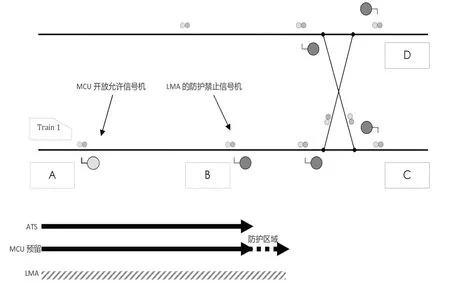
圖3 進路排列移動授權及信號開放

圖4 列車到達目標位置移動授權移除
4.2 應用場景2:LMA 越過道岔的場景
給停放在站臺B 的列車1 排列一條ATS 進路到站臺C,軌旁MCU 判斷ATS 進路請求,通過ECU 開放列車前方的信號機。當列車繼續向前運行至觸發區段后,MCU 首先判斷前方道岔的位置是否是在進路需求的位置,道岔資源是否被其他進路占用或有故障,當道岔可以滿足進路需求位置,MCU 會通過ECU控制道岔電路將道岔扳動到需求位置,并聯鎖鎖閉道岔,同時通過ECU 開放道岔前的防護信號機。當列車運行至目的地站臺C 后,ATS 進路、MCU 保護進路及LMA 釋放并移除(見圖5)。
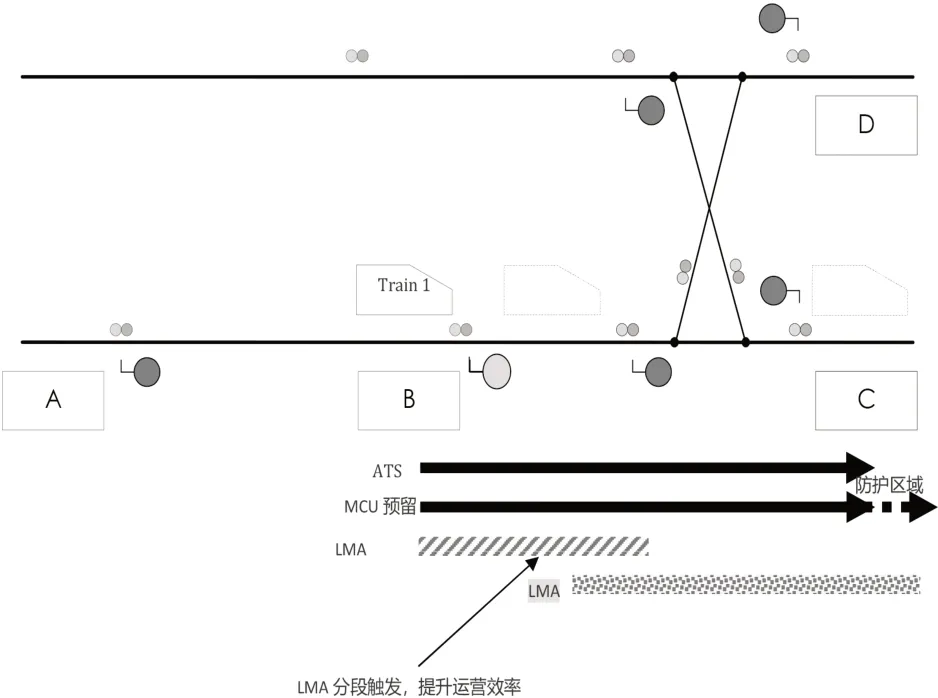
圖5 越道岔移動授權分部延伸
4.3 應用場景3:雙向LMA 的場景
先給停放在站臺D 的列車2 排列一條ATS 進路到站臺B,再給列車1 排列到站臺B。列車2 的LMA 優先到達站臺B,列車1 的LMA 受限于列車2 的LMA 會到達不了站臺B。列車2 最終會停靠在站臺B,并移除ATS 進路以及LMA。列車1 會根據LMA 貼近站臺B,并在LMA 到達的最遠點停車,直到滿足LMA 延伸到站臺B 之后,列車1 會重新獲取目標距離以及推薦速度(見圖6)。
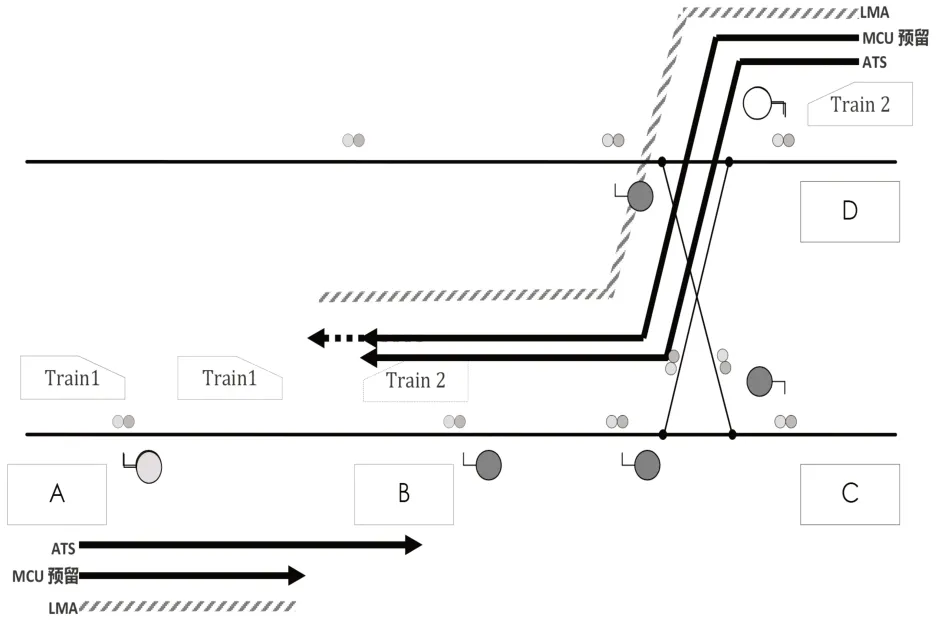
圖6 雙向移動授權延伸機制
4.4 應用場景4:兩列車追蹤LMA
先給停放在站臺B 的列車1 排列到站臺D,再給停放在站臺A 的列車2 排列到站臺C 的進路。列車1的進路在檢查完道岔條件后,MCU 預留以及LMA 會直接延伸到目的地站臺D,對于列車2,由于列車1 一開始在B 站臺,所以列車2 的LMA 受限于列車1 的位置,列車2 的MCU 預留會延伸到列車1 的尾部,隨著列車1 移動,移動中的列車2 的LMA 以及MCU 預留會不斷延伸,同時,由于一開始列車1 的ATS 進路把道岔轉到了反位,當列車1 到達站臺D 進路解鎖后,道岔聯鎖鎖閉解鎖,此時列車2 的MCU 預留在不斷延伸過程中,會控制軌旁ECU 輸出命令,將道岔轉到定位,使列車2 的LMA 以及MCU 預留最終到達目的地站臺C(見圖7)。
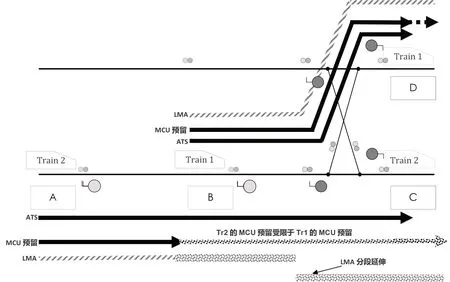
圖7 追蹤移動授權延伸機制
4.5 應用場景5:跨邊界的LMA
給列車1 排列站臺A 到站臺B 的進路,MCU1 建立LMA 到邊界,一旦LMA 到達邊界,MCU1 將請求LMA 延伸,MCU1 通過軌旁的ATP 骨干網將數據傳輸 給MCU2,MCU2 計 算列 車1 的MCU 預留以及LMA。 一旦列車即將接近邊界時,列車VCU 與MCU2 建立連接后,MCU2 將本控區內的MCU 預留以及LMA 發送給列車1 的VCU,VCU 將連接兩個LMA(見圖8)。
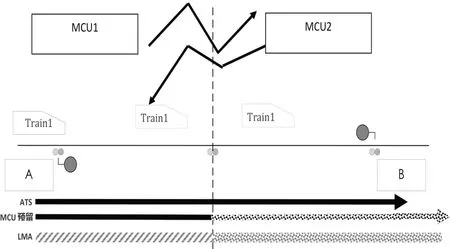
圖8 跨邊界移動授權交接機制
5 結語
TSTCBTC2.0 在可靠的雙冗余設計情況下,首次采用聯鎖/列控一體化設計理念,將更多的功能及計算集成到MCU 中,減少傳統聯鎖在列車運行中的參與,以車為中心的設計理念,安全的列車定位計算以及獨特的移動授權機制,在一定程度上不再依靠古板的聯鎖表保證列車運行安全,未來在5G、列車定位、環境感知、人工智能等大數據平臺基礎的加持下,能夠實現無聯鎖且可靠高效的運營。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32