支持向量機在舶航程智能終端節能降耗中的應用
2022-04-29 20:25:58周勝
計算機應用文摘
2022年9期
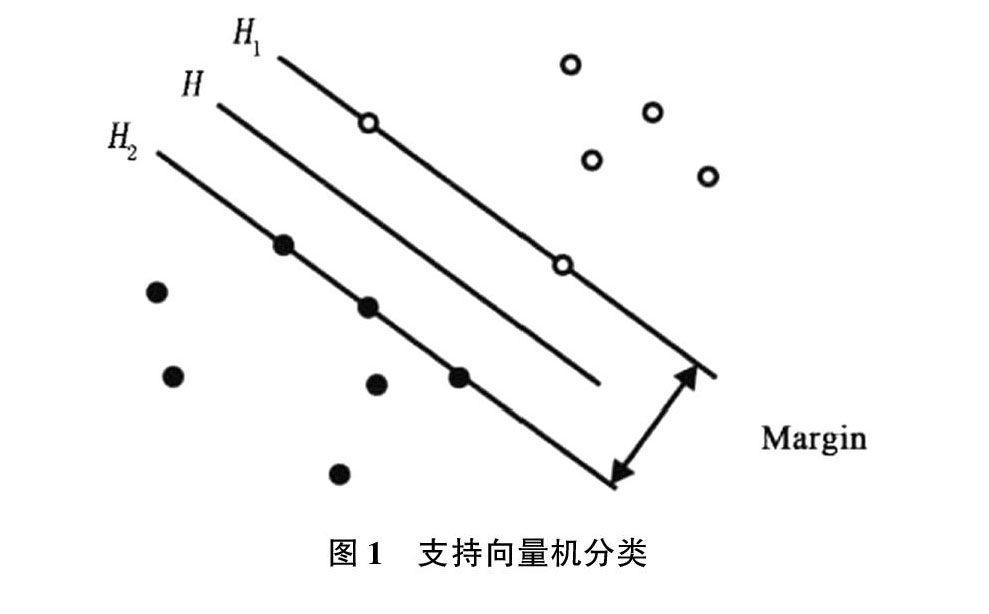
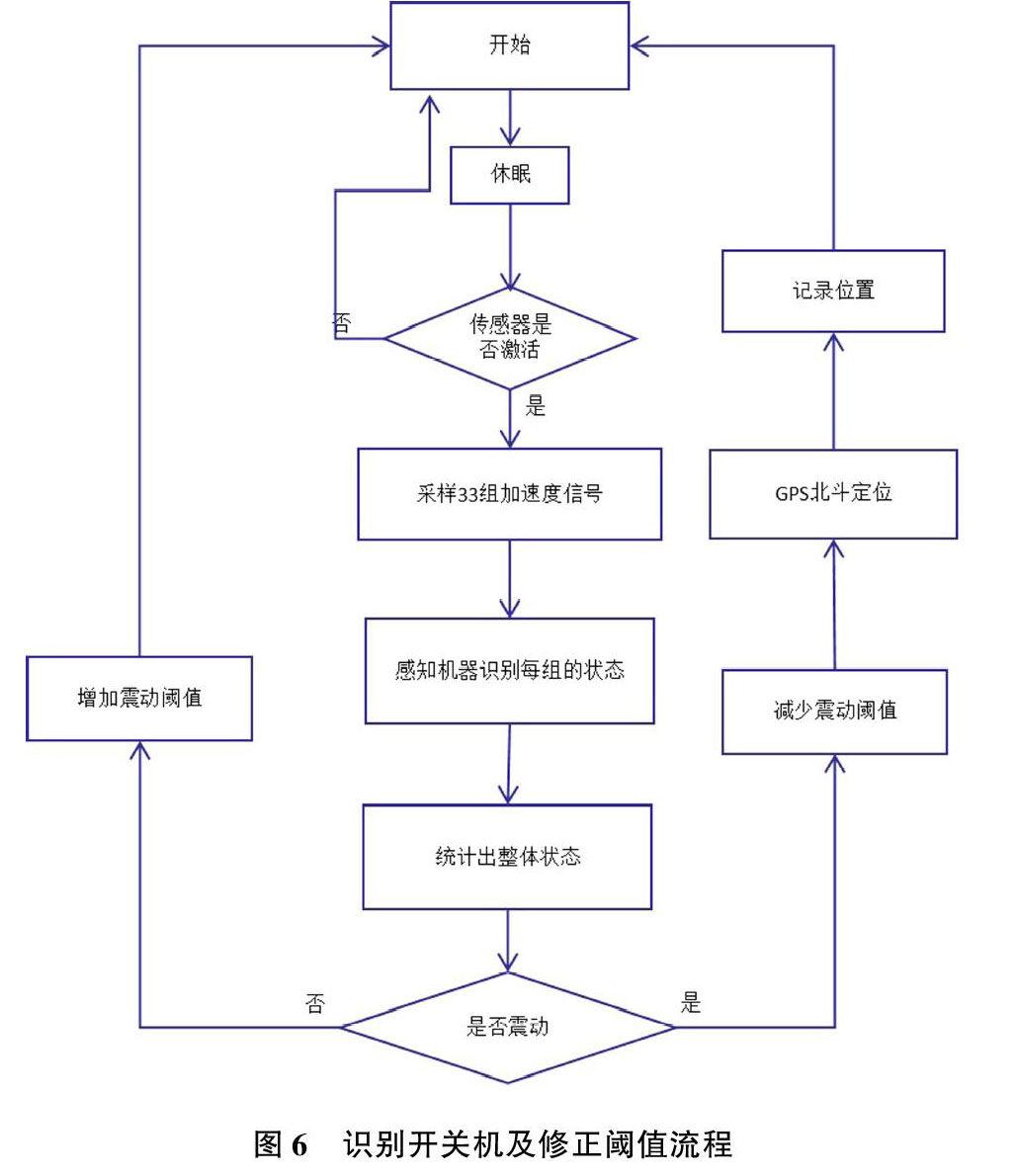
摘要三維傳感器有激活閾值參數達到該參數時可觸發采集加速度數據;船舶的運行狀態與三維加速度有密切聯系;支持向量機是一種監督分類方法學習三維加速度對應的船舶狀態再通過支持向量機學習參數識別船舶的運動狀態以及修正三維傳感器激活閾值可以達到記錄運動軌跡的目的減少不必要的、北斗定位實現系統的節能降耗及航程記錄。
關鍵詞三維加速度;支持向量機;震動識別;動量;隨機梯度
中圖法分類號:TP181文獻標識碼:A
Application of support vector machine in energy saving and consumptionreduction of ship voyage intelligent terminal
ZHOU Sheng
(Shanghai Universal Navigation Technology Co.,Ltd.,Shanghai 201702,China)
Abstract : The three-dimensional sensor has an activation threshold parameter. When this parameter isreached,it can trigger the acquisition of acceleration data,the operating state of the ship is closelyrelated to the three-dimensional acceleration,the support vector machine is a supervised classificationmethod.The vector machine learns the parameters,identifies the motion state of the ship andcorrects the activation threshold of the three-dimensional sensor,which can achieve the purpose ofrecording the motion trajectory,reduce unnecessary GPS and Beidou positioning,and realize theenergy saving and voyage recording of the system.
Key words: three-dimensional acceleration,support vector machine,vibration identification,momentum,random gradient
1? 引言
相關部門對漁船進行柴油補貼的重要依據是航行里程。通常而言,在漁船上安裝船舶航程智能終端,可以記錄漁船位置,并在 GPRS 網絡覆蓋范圍內實時地傳輸相關信息。舶航程智能終端強制要求能可靠運行3 年以上,其一般都是內部供電,目的是不影響船舶的現有供電線路以及便于安裝。因此,設備的穩定、節能以及準確記錄航行里程非常重要。
舶航程智能終端在記錄航行里程時,傳統做法都是固定時間間隔,以記錄船舶經緯度位置,在定位過程中需要通過北斗及 GPS 雙模定位,會消耗大量的能量,如不對能耗進行優化,設備很難滿足使用期限這一重要指標。為了節能降耗,往往把定時間隔加大,造成位置軌跡連續性差,不利于航程統計,進而影響柴油補貼發放。
本文通過研究船舶運行震動與三維加速度的關系,通過支持向量機識別船舶的運動狀態以及修正三維傳感器激活閾值,做到既能節能降耗又能實現精細的軌跡記錄。……
登錄APP查看全文
