電站鍋爐巡檢無人機圖像增強及智能識別技術
2022-05-06 09:02:42張堅群
儀器儀表用戶 2022年5期
張堅群
(浙江浙能樂清發(fā)電有限責任公司,浙江 溫州 325609)
0 引言
目前,燃煤發(fā)電依舊是國內的主要電力來源,2021年燃煤電站發(fā)電量占全國總發(fā)電量約70%。在燃煤電站,鍋爐是最主要的設備之一,是化石燃料轉化為熱能的場所。煤等化石燃料在鍋爐爐膛內燃燒,產生熱能,然后將熱能轉化為電能,所以鍋爐的穩(wěn)定運行至關重要。但是由于爐膛內燃燒溫度特別高,煙氣流速非常快,鍋爐水冷壁等受熱面經常出現(xiàn)大面積結焦和爆管事故,嚴重威脅到鍋爐的安全運行。
加強鍋爐的檢修是保證鍋爐安全運行的有效手段,目前主要有兩種檢修方式:一類是事故后的停爐檢修,一類是日常定期檢修。鍋爐爐膛四周布滿了金屬水冷壁,是一個內部沒有光源封閉的矩形空間,布滿了灰塵和煤焦,且富含CO等有毒氣體,環(huán)境非常惡劣,非常不利于檢修[1-3]。目前無論是日常檢修還是緊急事故檢修,都需要在鍋爐爐膛完全冷卻后(環(huán)境溫度),在爐膛內搭建人工腳手架,檢修工人進入爐膛后,采用人工巡視對爐膛進行全面巡檢。這種傳統(tǒng)的人工鍋爐檢修方式,耗時耗力,消耗大量人力物力,經濟效益較低,同時檢修風險也比較高。
利用智能化設備提高檢修效率,降低檢修成本以及提高檢修安全性,是建設智慧電廠的重要內容。隨著無人機技術的進步和發(fā)展,被廣泛應用于電力巡檢等領域。無人機作為一個技術平臺和工具,正被應用于各個領域[4,5]。在國外,德國Quenzel Jan等人開發(fā)了用于工業(yè)煙囪巡檢的無人機導航系統(tǒng)[6],無人機采用多旋翼無人機,配備3D激光掃描儀以及立體聲相機等多個傳感器,多傳感器之間相互融合工作。瑞士Michael Burr 和Janosch Nikolic 等人設計并開發(fā)了基于視覺火電廠鍋爐爐膛檢測的無人機,能夠用于大型鍋爐爐膛的檢測[7]。國內對無人機在封閉空間的導航問題進行了大量研究,北京航空航天大學吳琦等人研究了封閉空間無衛(wèi)星導航信號條件下小型無人機的導航問題[8]。燕山大學王夢石和華南理工大學姚土采用超帶寬定位技術,(UWB)研究了無人機室內導航問題[9,10]。
本文在某600MW超臨界機組爐膛內,采用UBW定位技術,進行了無人機爐膛巡視檢修測試,結果表明利用無人機可以完成鍋爐爐膛事故和日常巡檢。通過無人機攜帶高清攝像機對爐膛進行全爐膛掃描,掃描圖像可以實時傳輸至爐外,也可以用于計算機智能分析。測試結果表明,由于爐膛內光線昏暗,且多灰塵,所攝取的視頻圖像不能夠直接用于人工巡檢和智能巡檢。本文研究了鍋爐爐膛無人機視頻預處理和智能識別技術,將無人機獲得的視頻經過光學校正、去噪、圖像復原等預處理措施,然后用于人工巡檢和智能巡檢,取得較好的效果。
1 燃煤電站鍋爐無人機巡視技術
燃煤電站鍋爐巡檢無人機飛控解決方案如圖1,無人機采用四旋翼機翼無人機。主要包括了主控單元、無線通信模塊、操控器、傳感器、執(zhí)行機構,以及三維路徑規(guī)劃和定位系統(tǒng)。主控單元是控制系統(tǒng)的核心模塊,主要將采集到的飛行數(shù)據(jù)和控制指令,由高級控制算法實時計算后輸出到執(zhí)行機構,控制飛機的飛行姿態(tài)和路徑。各種傳感器用于采集飛機的姿態(tài)、速度和高度等數(shù)據(jù),執(zhí)行機構控制四旋翼機翼的轉速和方向。無線通信模塊是人工操控和自動飛行的通訊接口模塊,無線通信模塊由爐外端和爐內端構成,兩端通過有線連接。爐外端通過無線連接著操控器和三維定位服務器,爐內端負責在爐內與無人機飛控通訊、數(shù)據(jù)交互以及視頻信號采集等。操控器用于人工控制飛行,三維定位服務器以鍋爐爐膛為對象,開發(fā)一個三維模型,將無人機飛行軌跡在三維模型上實時展示。在人工飛行模式下,由于無法目測無人機的飛行軌跡,參照實時三維模型上的飛行軌跡,可以解決爐外盲飛的問題。在自動飛行模式下,在三維模型上人工規(guī)劃飛行路徑,無人機將按照既定的軌跡自主飛行。同時三維定位服務器實時接收無人機的視頻數(shù)據(jù),將爐內的實時視頻數(shù)據(jù)傳輸至服務器保存和處理。

圖1 燃煤電站鍋爐巡檢無人機飛控解決方案Fig.1 Flight control solution of UAV for boiler inspection in coal-fired power station
圖2為600MW超臨界鍋爐爐膛無人機巡檢視頻信號處理方案,主要包括了多傳感器視頻采集和信號傳輸,視頻數(shù)據(jù)預處理,基于立體視覺的三維重建、超聲波三維定位以及故障智能識別等。本文主要介紹視頻預處理和基于神經網絡的故障識別技術。
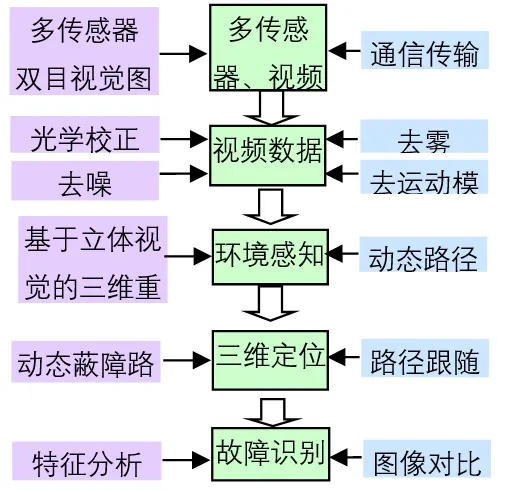
圖2 600MW超臨界鍋爐爐膛無人機視頻信號處理方案Fig.2 Video signal processing scheme of UAV in 600 MW supercritical boiler furnace
2 爐膛巡檢無人機視頻圖像增強技術
2.1 鍋爐受熱面視頻光學校正
電站鍋爐爐膛環(huán)境惡劣,黑暗無光源。照明是爐內無人機飛行的主要困難之一,加裝外部電源需周期長且能耗高,受限于無人機續(xù)航和電池容量,無人機自帶照明照度有限。本文所研制的無人機采用自帶照明技術,但受限于鍋爐昏暗和多灰環(huán)境,視頻圖像亮度信息明顯不足。無人機所拍攝的動態(tài)視頻對于亮度有一定的需求,否則視頻信號會失真,導致鍋爐受熱面的檢查結果誤差較大,使得巡檢結果不客觀、不理想且不準確。為了解決這一難題,采用基于伽馬校正方法對視頻進行補光處理,調整視頻亮度圖像,同時能夠保持視頻亮度等細節(jié)信息,防止在估計亮度圖像的過程中丟失亮度信息。通過該方法有效解決了電站鍋爐爐內光源缺乏的問題,改善視頻圖像對比度下降以及亮度不均衡的缺陷,有效解決了無人機鍋爐內部巡視視頻質量不佳的問題,具體校正方法如下:
為了達到亮度一致的目的,需要使屏幕色彩響應函數(shù)滿足:

根據(jù)等式(1),得到優(yōu)化的約束條件:

Hd′ (x,y)計算影響對比度尋優(yōu),為了能夠在約束條件限制下獲得亮度響應曲面,提出了一種基于貪心方法的動態(tài)優(yōu)化算法。
貪心方法的基本原理是:優(yōu)化問題是尋找問題的可行解,所謂可行解是滿足一定約束條件的解。優(yōu)化問題一般存在一個目標函數(shù),此目標函數(shù)能夠綜合評價優(yōu)化問題,優(yōu)化問題轉化為獲得目標函數(shù)的可行解。它把優(yōu)化問題求解過程分成若干個子過程,使得每一個子過程的目標函數(shù)極大(或極小),判斷是否是可行解,如果是則繼續(xù)進行下一階段的求解,否則尋找目標函數(shù)次優(yōu)解作為可行解。
為了目標亮度問題尋優(yōu),計算響應曲面函數(shù)Hd′ (x,y),給出目標函數(shù):

測量得到的亮度響應曲面Hd(x,y)和目標亮度響應曲面Hd′ (x,y) 的均方差,通過貪心方法求使目標函數(shù)最大的可行解。
此算法也是一種濾波算法,算法的輸出是一階連續(xù)的,所以亮度統(tǒng)一的結果也是變化平滑的。圖3是運用該算法得到的對比圖。

圖3 無人機巡檢的圖像光學校正Fig.3 Image optical correction of UAV patrol inspection
2.2 爐膛受熱面的無人機圖像去噪
電站鍋爐爐膛多灰,無人機的飛行氣流使得空氣中的灰塵濃度升高,給無人機的視頻采集帶來困難,影響了視頻的清晰度。灰塵的大量存在,使得采集的視頻序列增加了嚴重的噪聲,這些噪聲的存在使得視頻質量嚴重下降,影響對鍋爐受熱面的檢測質量。因此,視頻圖像序列去噪聲是本文研究的另一項重點內容。
維納(Wiener)濾波器是一種自適應濾波器,為了適應信號噪聲未知的或隨時間變換的統(tǒng)計特性,利用潛意識可以獲得的濾波器參數(shù)等結果,自動調節(jié)現(xiàn)時刻的濾波器參數(shù)。具體的,自適應濾波器根據(jù)圖像的局部方差調整濾波器的輸出,目標是使恢復圖像g(x,y)與原始圖像f(x,y)的均方差最小。
維納(Wiener)濾波器首先估計出像素的局部矩陣均值和方差:
對每一個像素利用Wiener濾波器估計出其像素值:

式(5)中,v2為噪聲的方差。
綜上所述,維納濾波去噪方法以濾波器的輸出根據(jù)圖像局部方差來調整。相對于線性濾波器,維納濾波器選擇性更好,圖像的邊緣和高頻細節(jié)等信息可以得到更好地保留和加強。在濾波處理過程中,當圖像局部方差偏大時,濾波平滑效果較弱,反之濾波平滑效果較強。本文研究表明,通過本維納濾波去噪算法,有效提高算法計算速度和魯棒性,具有較好的去噪效果。
圖4是通過使用維納濾波器去噪算法進行處理的對比圖像。
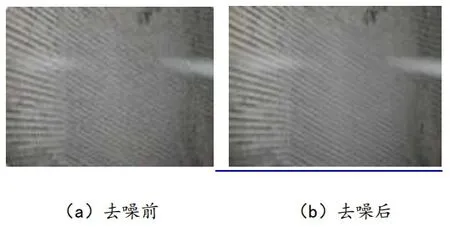
圖4 無人機巡檢的圖像去噪Fig.4 Image denoising of UAV patrol inspection
2.3 無人機運動模糊圖像復原
攝像機在獲取景物時,如果在相機的曝光時間內景物與相機之間有相對運動,則得到的圖像往往會比較模糊,這類退化圖像被稱為運動模糊圖像。一般有兩種途徑可以減少由于模糊而引起的圖像退化。一種是減少相機的曝光時間,這樣可以在一幀圖像的積分時間內減少運動模糊距離,也就減小了一個像素點的能量在多個像素點上的平均。但曝光時間不能無限地減小,曝光時間太短會導致每個像素上積累的能量太少,則獲得圖像的亮度太低而使圖像質量嚴重下降。另一種途徑是建立圖像運動模糊的數(shù)學模型,利用圖像處理技術將退化圖像進行復原,達到消除圖像運動模糊的目的。這種方法與具體的硬件設備無關,具有普遍性,因而受到了廣泛的關注。
運動模糊圖像的恢復是圖像復原的主要分支之一,由于大多數(shù)圖象恢復問題都不具有唯一解,或者說恢復具有病態(tài)特征。為了克服這一問題,通常需要在恢復過程中對運算施加某種約束。
設對圖施加某一線性運算Q,求在約束條件:

利用拉格朗日乘數(shù)法,構造輔助函數(shù):

實際飛行結果表明,在4個方向中均出現(xiàn)運動模糊,其中前向運動模糊是最主要的。研究表明,飛行姿態(tài)變化對模糊尺度具有一定的影響,與前向運動模糊還是主要的,兩者相差一個數(shù)量級,因此飛行姿態(tài)變化對模糊的影響可忽略不計。前向運動模糊的補償一般有電子式、光學式和機械式等補償方法,利用這些補償方法能有效消除無人機相對運動視頻質量的影響,有效恢復圖像質量。除了前向運動模糊,大氣湍流、機翼隨機旋轉和振動等造成的運動模糊,對視頻質量也有一定的影響。對于該運動模糊,通過式(6)的運動補償算法,對圖像復原算法進行改進,開發(fā)了實時性和魯棒性都較強的去模糊算法。通過無人機在爐膛內實際應用表明,采用該去模糊算法效果良好。圖5是通過使用該去模糊圖像復原算法處理的對比圖像。
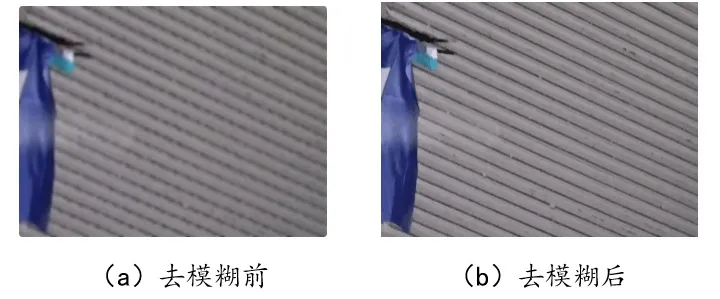
圖5 無人機巡檢的圖像去模糊Fig.5 Image deblurring of UAV patrol inspection
3 受熱面故障缺陷智能識別檢測
深度信念神經網絡被廣泛用于智能巡檢等領域,為了確保神經網絡能夠按照最大概率生成訓練數(shù)據(jù),需要對神經網絡進行訓練,目標是通過學習算法獲得一組最優(yōu)的權值。深度信念網絡屬于神經網絡范疇,但其包含了多隱層網絡模型。多隱層網絡模型權值訓練具有一定的難度,由于隱層太多,若直接使用梯度下降法,容易使網絡陷入局部最小。同時,隨著網絡隱層數(shù)目的增加,網絡梯度幅度急劇減小,深度也相應增加,造成神經網絡權重調節(jié)非常緩慢。在網絡訓練過程中,初始權值是決定網絡訓練質量的一個主要因素,對訓練結果和學習算法魯棒性影響較大。本文采用Hinton提出的一種非監(jiān)督的貪心逐層訓練算法對深度信念神經網絡的權值進行預處理,可以得到一組相對比較最優(yōu)的權值,解決了相關的深層網絡結構優(yōu)化難題。

式(8)中:aj是RBM2層第j個神經元的基;W就是RBM網絡的鏈接權值。
對于被訓練的每一個樣本s,將其賦值給可見層進行訓練RBM,充分訓練RBM1后,固定RBM1權值,使用式(8)得到RBM2的輸入向量,然后訓練RBM2。以此類推,完成整個神經網絡的權值預處理。
采用式(8)預訓練完后,將輸出層神經元的激勵函數(shù)設置為sigmoid函數(shù),獲得了深度信念網絡的較優(yōu)權值。訓練結束后,訓練樣本的輸入和輸出可以作為神經網絡初始輸入和輸出,其中權值大小的調節(jié)需要根據(jù)神經網絡的輸出和訓練樣本中對應輸出之間的差值反向調節(jié),采用梯度下降法對預訓練權值進行調節(jié),最終得到比較優(yōu)的權值。從輸出層和各個隱層之間的權值逐步調節(jié)開始,相應權值全部滿足精度后,整個網絡的結構和權值全部確定。測試樣本的100組數(shù)據(jù)進行測試,擬合的效果如圖6,模型輸出和期望值偏差如圖7。
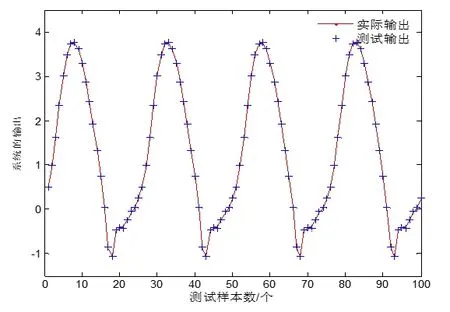
圖6 模型測試輸出和實際輸出Fig.6 Model test output and actual output
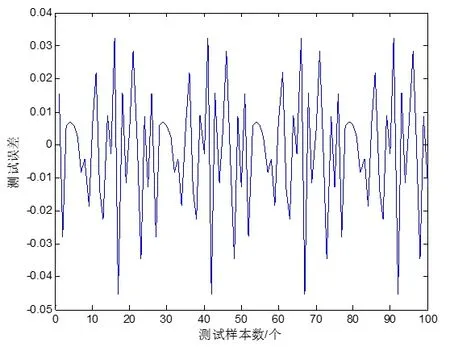
圖7 模型測試輸出和實際輸出誤差Fig.7 Actual error between model test output and actual output
在實際應用過程中,利用該深度信念神經網絡算法,對爐膛內結焦狀況進行智能識別,成功的發(fā)現(xiàn)了燃燒器的結焦情況,如圖8所示。
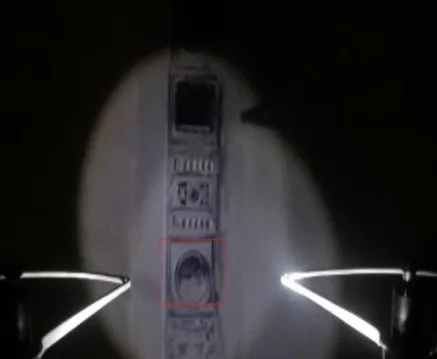
圖8 智能檢測燃燒器結焦識別Fig.8 Intelligent detection and burner coking identification
4 結論
由于鍋爐爐膛無光源,含有大量的煤灰。利用無人機所獲取的受熱面視頻圖像,不能直接用于人工檢測和智能診斷。論文研究了鍋爐受熱面無人機視頻光學校正、信號去噪以及去模糊技術。將所獲取的受熱面視頻圖像經過預處理后,采用基于神經網絡的智能檢測技術,對例如爐膛結焦等受熱面故障進行智能分析,取得了較好的效果。
本文研究結果表明,利用無人機開展爐膛巡視和檢修是可行的,可以節(jié)約大量檢修成本,提高檢修效率,降低檢修風險,為燃煤電站的智能化和智慧化技術發(fā)展提供了思路。
