改進(jìn)人工魚群法的機(jī)器人路徑規(guī)劃方法
2022-05-10 00:02:46陳茜茜張秀峰
計(jì)算機(jī)技術(shù)與發(fā)展 2022年4期
張 寧,陳茜茜,李 微,張秀峰*
(1.國(guó)家康復(fù)輔具研究中心,北京 100176;2.天津理工大學(xué) 電氣電子工程學(xué)院,天津 300384)
0 引 言
機(jī)器人是將電子技術(shù)、控制技術(shù)、機(jī)械技術(shù)以及通信技術(shù)等技術(shù)融合為一體的高科技學(xué)科[1],機(jī)器人的誕生節(jié)省人類大量財(cái)力、物力,提升社會(huì)生產(chǎn)效率,人類無(wú)法完成的高危任務(wù)通過(guò)機(jī)器人可順利完成。導(dǎo)航機(jī)器人是機(jī)器人領(lǐng)域的重要課題。依據(jù)機(jī)器人規(guī)劃目標(biāo)存在的差異,可將機(jī)器人路徑規(guī)劃分為全區(qū)域遍歷路徑規(guī)劃以及點(diǎn)對(duì)點(diǎn)路徑規(guī)劃兩部分[2-3]。可視圖法、柵格法等方法可應(yīng)用于環(huán)境已知情況下的路徑規(guī)劃,粒子群算法、遺傳算法等機(jī)器學(xué)習(xí)算法可應(yīng)用于未知環(huán)境以及僅明確部分環(huán)境情況下的路徑規(guī)劃。
目前針對(duì)機(jī)器人路徑規(guī)劃的研究較多,徐小強(qiáng)等人分別利用改進(jìn)人工勢(shì)場(chǎng)法以及螢火蟲算法實(shí)現(xiàn)機(jī)器人路徑規(guī)劃[4-5],但對(duì)于障礙物過(guò)多以及動(dòng)態(tài)環(huán)境下,規(guī)劃性能較差。人工魚群法是依據(jù)動(dòng)物行為而來(lái)的全局尋優(yōu)的重要方法,人工魚群法依據(jù)動(dòng)物的局部尋優(yōu)行為獲取群體的全局最優(yōu)值,該算法具有較高的全局收斂能力,可有效避免計(jì)算過(guò)程中陷入局部最優(yōu),自適應(yīng)搜索能力強(qiáng),無(wú)需設(shè)置目標(biāo)函數(shù)梯度值即可實(shí)現(xiàn)算法快速收斂[6]。針對(duì)機(jī)器人路徑規(guī)劃問(wèn)題對(duì)人工魚群法實(shí)施改進(jìn),為提升機(jī)器人路徑規(guī)劃性能,獲取最佳全局極值能力,改善傳統(tǒng)人工魚群法對(duì)啟發(fā)式函數(shù)起始點(diǎn)要求過(guò)于遲鈍的缺陷,利用自適應(yīng)擁擠度因子以及自適應(yīng)視覺(jué)范圍對(duì)人工魚群法實(shí)施改進(jìn),提升機(jī)器人路徑規(guī)劃有效性。通過(guò)實(shí)驗(yàn)驗(yàn)證采用改進(jìn)人工魚群法規(guī)劃?rùn)C(jī)器人路徑具有較高有效性。
1 改進(jìn)人工魚群法的機(jī)器人路徑規(guī)劃方法
1.1 建立環(huán)境模型與路徑表示
選取多面模型表示法建立機(jī)器人行駛路徑的環(huán)境空間模型。設(shè)所建立的環(huán)境空間未考慮高度信息,機(jī)器人移動(dòng)范圍為二維有限空間,將機(jī)器人半徑的一半向外擴(kuò)展設(shè)置為障礙物邊界[7],保障障礙物與機(jī)器人間存在一定距離,將機(jī)器人視為移動(dòng)質(zhì)點(diǎn)。
在直角坐標(biāo)系XOY內(nèi)建立全局環(huán)境場(chǎng)景,利用圓或?qū)嵭亩噙呅伪硎菊系K物,用Z(xz,yz)與T(xt,yt)分別表示起始點(diǎn)以及目標(biāo)點(diǎn),利用x軸以及y軸設(shè)置為連接Z與T的直線以及垂直于x軸且經(jīng)過(guò)Z的直線,獲取新的環(huán)境坐標(biāo)系xoy。坐標(biāo)變換直角坐標(biāo)系XOY內(nèi)隨機(jī)點(diǎn)Q(X,Y)可得該點(diǎn)在坐標(biāo)系xoy內(nèi)的坐標(biāo)為:
(1)
(2)
式中,λ與(x,y)分別表示初始x軸與ZT間的夾角以及點(diǎn)Q在坐標(biāo)系xoy內(nèi)的坐標(biāo)。
n等分線段ZT,用{L1,L2,…,Ln-1}表示沿各等分點(diǎn)所獲取的與ZT垂線段垂直的柵欄線。隨機(jī)選取柵欄線中點(diǎn)設(shè)置為路徑節(jié)點(diǎn),可得y={ys,y1,y2,…,yn-1,yt}即不同路徑節(jié)點(diǎn)縱坐標(biāo)向量建立的環(huán)境空間路徑。
機(jī)器人路徑規(guī)劃結(jié)果由所建立目標(biāo)函數(shù)決定,選取機(jī)器人行駛路徑總長(zhǎng)度最短以及路徑安全度最高作為優(yōu)化目標(biāo)[8],將機(jī)器人行駛路徑依據(jù)障礙物碰撞情況分為不可行路徑以及可行路徑兩部分。利用懲罰函數(shù)法獲取目標(biāo)函數(shù)值極小的個(gè)體,利用施加懲罰項(xiàng)在評(píng)價(jià)不可行路徑時(shí)提升目標(biāo)函數(shù)值。設(shè)包含起始點(diǎn)以及目標(biāo)點(diǎn)的路徑節(jié)點(diǎn)數(shù)量為n,該路徑中包含路徑段數(shù)量為n-1,用Q={Q1,Q2,…,Qn}與Qi(i=1,2,…,n)分別表示路徑以及路徑節(jié)點(diǎn)。建立優(yōu)化目標(biāo)如下:
(1)路徑總長(zhǎng)度最短。
(3)
式中,|qiqi+1|與num分別表示路徑段qiqi+1長(zhǎng)度以及路徑Q內(nèi)相交于障礙物的路徑段數(shù)量;inf1表示路徑Q為不可行路徑時(shí)所需施加的懲罰項(xiàng)。
(2)路徑安全度。路徑安全度指機(jī)器人行駛過(guò)程中需躲避障礙物,避免碰撞障礙物,設(shè)置機(jī)器人路徑規(guī)劃路徑安全度目標(biāo)函數(shù)如下:
(4)
式中,g與μ分別表示路徑Q與全部障礙物的最短距離以及保障路徑安全度有界的合適正數(shù);num與inf2分別表示與障礙物相交的路徑Q內(nèi)路徑段數(shù)量以及路徑Q為不可行路徑時(shí)所需施加的正數(shù)懲罰項(xiàng)。
選取權(quán)重系數(shù)法建立多目標(biāo)機(jī)器人路徑規(guī)劃的目標(biāo)函數(shù),將總目標(biāo)函數(shù)值分配權(quán)值至各目標(biāo)函數(shù)值[9],建立機(jī)器人路徑規(guī)劃總目標(biāo)函數(shù)表達(dá)式如下:
f(Q)=ω1·f1(Q)+ω2·f2(Q)
(5)
式中,ω1表示路徑長(zhǎng)度的權(quán)值系數(shù),ω2表示路徑安全度的權(quán)值系數(shù)。
可依據(jù)機(jī)器人行駛場(chǎng)景以及路徑規(guī)劃需求實(shí)時(shí)調(diào)整權(quán)值系數(shù)[10],獲取最優(yōu)機(jī)器人路徑規(guī)劃結(jié)果。利用改進(jìn)人工魚群法求解所建立總目標(biāo)函數(shù),規(guī)劃?rùn)C(jī)器人最佳行駛路徑。
1.2 人工魚群法
令向量X={x1,x2,…,xn}表示人工魚群法中個(gè)體狀態(tài),xi為待尋優(yōu)變量。Y=f(x)與di,j=‖Xi-Xj‖分別表示人工魚個(gè)體當(dāng)前位置的食物濃度以及不同個(gè)體間距;Y與Visual分別表示目標(biāo)函數(shù)值以及人工魚感知距離;step與δ(0<δ<1)分別為人工魚移動(dòng)步長(zhǎng)以及擁擠度因子。
人工魚群法主要包括以下操作:
(1)覓食操作。Xi表示人工魚個(gè)體此時(shí)狀態(tài),隨機(jī)選取狀態(tài)Xj于感知范圍內(nèi),采用人工魚群法求解極小值時(shí),當(dāng)Xi>Xj以及Xi≤Xj時(shí),分別向Xj方向前進(jìn)以及再次隨機(jī)選擇狀態(tài)Xj,重復(fù)判斷狀態(tài)Xj是否符合移動(dòng)條件,重復(fù)迭代仍不符合移動(dòng)條件時(shí),繼續(xù)向隨機(jī)方向移動(dòng)[11]。

(4)公告板。人工魚群內(nèi)最優(yōu)人工魚個(gè)體狀態(tài)利用公告板存儲(chǔ)。人工魚群法中人工魚個(gè)體完成尋優(yōu)操作后應(yīng)查看公告板所登記狀態(tài)與人工魚個(gè)體狀態(tài)[12],人工魚個(gè)體狀態(tài)優(yōu)于公告板狀態(tài)時(shí),更新公告板。
(5)操作選擇。依據(jù)機(jī)器人路徑規(guī)劃需求評(píng)價(jià)人工魚環(huán)境,依據(jù)人工魚個(gè)體環(huán)境選取相應(yīng)操作。機(jī)器人路徑規(guī)劃問(wèn)題是極小值求取問(wèn)題,需令人工魚進(jìn)行追尾操作,追尾操作無(wú)法進(jìn)步時(shí)需進(jìn)行覓食操作[13],覓食操作無(wú)法進(jìn)步時(shí)需執(zhí)行聚群操作,以上操作仍未獲取理想結(jié)果時(shí),令人工魚個(gè)體隨機(jī)選取操作。
1.3 改進(jìn)人工魚群法的機(jī)器人路徑規(guī)劃
利用自適應(yīng)擁擠度因子以及自適應(yīng)視覺(jué)范圍對(duì)人工魚群法實(shí)施改進(jìn)。
通過(guò)柵格法將所建立環(huán)境空間實(shí)施離散化,用(xi,yi)與h分別表示人工魚i的當(dāng)前位置以及評(píng)價(jià)函數(shù),(xg,yg)表示待求解目標(biāo)點(diǎn)位置,可得評(píng)價(jià)函數(shù)h如下:
(6)


采用人工魚群法規(guī)劃?rùn)C(jī)器人路徑時(shí),利用覓食、追尾、聚群操作用于尋優(yōu)以及收斂[14],默認(rèn)人工魚群進(jìn)行覓食操作,用nra表示跳轉(zhuǎn)因子,人工魚群通過(guò)nra次覓食操作后轉(zhuǎn)化為追尾操作以及聚群操作。
1.3.1 自適應(yīng)擁擠度因子以及自適應(yīng)視覺(jué)范圍
人工魚群法的視覺(jué)范圍過(guò)大以及過(guò)小時(shí),分別有利于全局尋優(yōu)以及局部尋優(yōu)。將視覺(jué)范圍設(shè)置為先大后小,提升人工魚群法的計(jì)算效率。利用擁擠度因子求解最小值問(wèn)題,設(shè)置擁擠度因子較小[15],令人工魚個(gè)體較分散;計(jì)算后期時(shí),設(shè)置較大的擁擠度因子,聚集人工魚至最優(yōu)點(diǎn),完成擁擠度因子以及視覺(jué)范圍自適應(yīng),可得公式如下:

(7)
式中,V(k)與μ(k)分別表示視覺(jué)范圍及其自適應(yīng)調(diào)整因子;δ(k)與β(k)分別表示擁擠度因子及其自適應(yīng)調(diào)整因子。用j表示調(diào)整次數(shù),可得視覺(jué)范圍以及擁擠度因子自適應(yīng)調(diào)整公式如下:
(8)
(9)
利用以上公式實(shí)現(xiàn)覓食操作視覺(jué)范圍的自適應(yīng)調(diào)整,令視覺(jué)范圍在追尾操作以及聚群操作中維持不變。
1.3.2 改進(jìn)人工魚群法
利用改進(jìn)人工魚群法實(shí)現(xiàn)機(jī)器人路徑規(guī)劃具體流程如下:
(1)參數(shù)初始化。用V與N表示視覺(jué)范圍以及魚群規(guī)模,M與T表示算法迭代次數(shù)以及操作選擇嘗試次數(shù),s=0與δ(0)分別表示人工魚個(gè)體移動(dòng)步數(shù)以及擁擠度因子初值,lengbest=∞與n=0分別表示最優(yōu)路徑長(zhǎng)度以及次數(shù)計(jì)數(shù),nra與pathk分別表示跳轉(zhuǎn)因子以及路徑規(guī)劃表,pathbest表示所需獲取的機(jī)器人最優(yōu)行駛路徑。
(2)將路徑起點(diǎn)gbegin添加至路徑規(guī)劃表pathk內(nèi)。
(3)人工魚個(gè)體k滿足s=nra時(shí),形成隨機(jī)數(shù)ra=rand(2);ra=0與ra=1時(shí),分別執(zhí)行群聚操作以及追尾操作;s≠nra時(shí),令該人工魚個(gè)體實(shí)施覓食操作。
(4)設(shè)置k=k+1,當(dāng)k=N時(shí),令人工魚群內(nèi)全部人工魚個(gè)體前進(jìn)。設(shè)置s=s+1,觀察目標(biāo)點(diǎn)gend處是否存在人工魚,觀察結(jié)果為存在時(shí),設(shè)置k=0,將此時(shí)路徑長(zhǎng)度lengk輸出。輸出路徑長(zhǎng)度小于最佳路徑長(zhǎng)度時(shí),此時(shí)所輸出路徑更新為最佳路徑,此時(shí)pathk輸出為pathbest,進(jìn)行步驟(5);否則轉(zhuǎn)回至步驟(3)。
(5)設(shè)置n=n+1,當(dāng)?shù)螖?shù)滿足所設(shè)置次數(shù)時(shí),終止改進(jìn)人工魚群法計(jì)算,否則轉(zhuǎn)回至步驟(2)。
2 實(shí)例分析
為驗(yàn)證所研究方法對(duì)于機(jī)器人路徑規(guī)劃的有效性,建立大小為100 m×100 m的二維環(huán)境,設(shè)置不同場(chǎng)景環(huán)境地圖共八幅作為測(cè)試環(huán)境地圖,八幅環(huán)境地圖起始點(diǎn)坐標(biāo)以及柵欄線數(shù)量如表1所示。

表1 機(jī)器人場(chǎng)景地圖設(shè)置
統(tǒng)計(jì)采用文中方法對(duì)地圖1實(shí)施機(jī)器人路徑規(guī)劃的進(jìn)化曲線,為直觀驗(yàn)證文中方法的規(guī)劃性能,選取人工勢(shì)場(chǎng)方法(參考文獻(xiàn)[4])以及螢火蟲方法(參考文獻(xiàn)[5])作為對(duì)比方法,進(jìn)化曲線對(duì)比結(jié)果如圖1所示。

圖1 進(jìn)化曲線對(duì)比
從圖1可以看出,采用文中方法規(guī)劃?rùn)C(jī)器人路徑,僅需150次左右即可實(shí)現(xiàn)穩(wěn)定收斂;采用螢火蟲方法規(guī)劃?rùn)C(jī)器人路徑,需300次左右才可實(shí)現(xiàn)穩(wěn)定收斂;采用人工勢(shì)場(chǎng)方法規(guī)劃?rùn)C(jī)器人路徑,需350次左右才可實(shí)現(xiàn)穩(wěn)定收斂。文中方法收斂速度明顯高于另兩種方法,說(shuō)明文中方法可快速獲取全局最優(yōu)解,規(guī)劃路徑所需消耗時(shí)間低于另兩種方法。
采用三種方法對(duì)地圖1實(shí)施機(jī)器人路徑規(guī)劃的規(guī)劃結(jié)果如圖2所示。

圖2 地圖1路徑規(guī)劃結(jié)果對(duì)比
從圖2可以看出,采用三種方法均可基于地圖1的環(huán)境地圖實(shí)現(xiàn)機(jī)器人行駛路徑有效規(guī)劃。
為進(jìn)一步驗(yàn)證文中方法對(duì)機(jī)器人路徑的規(guī)劃性能,統(tǒng)計(jì)采用三種方法對(duì)8幅地圖實(shí)施機(jī)器人路徑規(guī)劃,重復(fù)10次迭代的最長(zhǎng)路徑、最短路徑以及平均路徑,對(duì)比結(jié)果如表2所示。

表2 機(jī)器人路徑長(zhǎng)度規(guī)劃結(jié)果
從表2可以看出,采用文中方法對(duì)8幅地圖實(shí)施機(jī)器人路徑規(guī)劃,規(guī)劃結(jié)果的最長(zhǎng)路徑、最短路徑與平均路徑均明顯低于另兩種方法,說(shuō)明文中方法規(guī)劃?rùn)C(jī)器人行駛路徑時(shí),可有效獲取機(jī)器人行駛的最短路徑,可滿足路徑總長(zhǎng)度最短的目標(biāo)。相比于人工勢(shì)場(chǎng)方法以及螢火蟲方法,文中方法所規(guī)劃路徑明顯優(yōu)于另兩種方法,可有效獲取機(jī)器人最優(yōu)行駛路徑,驗(yàn)證了文中方法的收斂精度較高。采用文中方法規(guī)劃?rùn)C(jī)器人行駛路徑時(shí),可有效解決復(fù)雜路徑規(guī)劃問(wèn)題,驗(yàn)證了文中方法的機(jī)器人路徑規(guī)劃的有效性。
統(tǒng)計(jì)采用三種方法對(duì)8幅地圖實(shí)施機(jī)器人路徑規(guī)劃,所獲取規(guī)劃路徑的安全度,對(duì)比結(jié)果如圖3所示。
從圖3可以看出,采用文中方法規(guī)劃?rùn)C(jī)器人行駛路徑,規(guī)劃不同地圖的路徑安全度均明顯高于另兩種方法。采用文中方法規(guī)劃?rùn)C(jī)器人行駛路徑可滿足路徑安全度最高的目標(biāo)。文中方法可有效解決多目標(biāo)優(yōu)化問(wèn)題,路徑規(guī)劃性能較高,同時(shí)滿足路徑總長(zhǎng)度最短以及路徑安全度最高的規(guī)劃目標(biāo)。
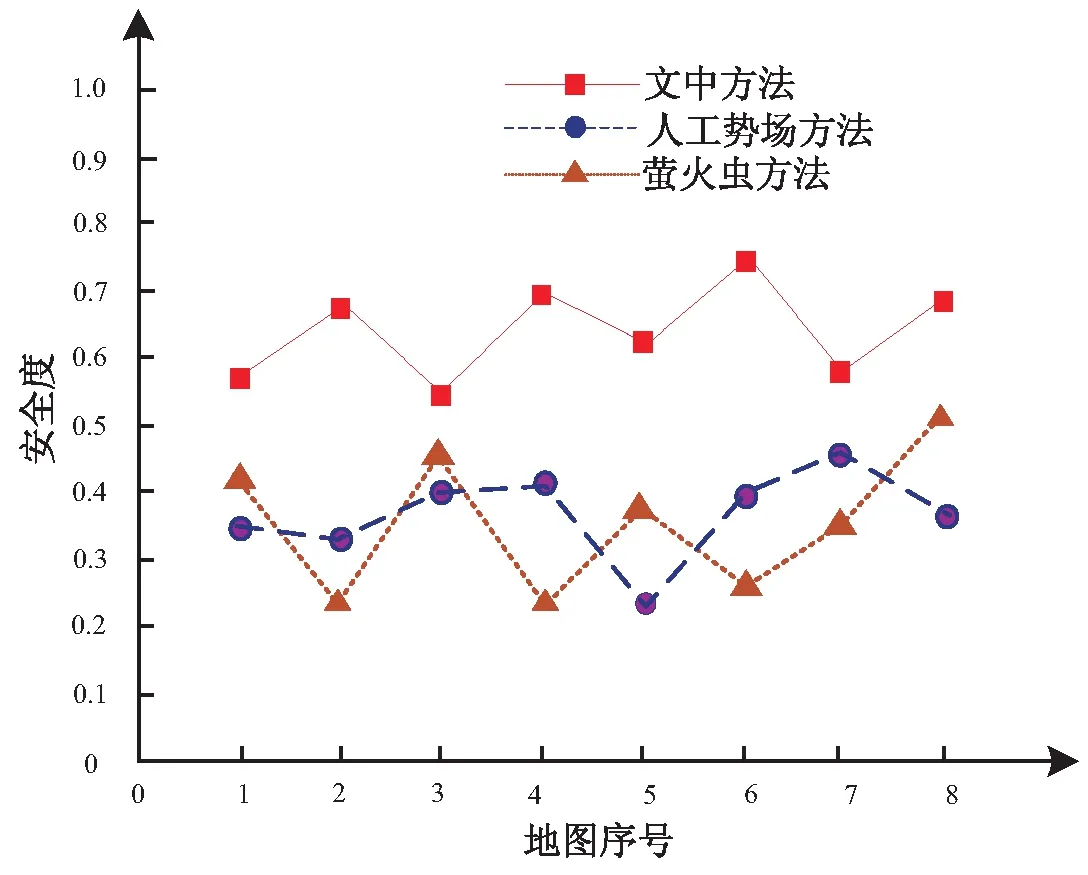
圖3 路徑規(guī)劃安全度對(duì)比
統(tǒng)計(jì)采用文中方法規(guī)劃?rùn)C(jī)器人行駛路徑的規(guī)劃時(shí)間,統(tǒng)計(jì)結(jié)果如表3所示。

表3 不同地圖規(guī)劃時(shí)間對(duì)比
從表3可以看出,采用文中方法規(guī)劃?rùn)C(jī)器人行駛路徑的規(guī)劃時(shí)間明顯低于另兩種方法,采用文中方法規(guī)劃8幅地圖中機(jī)器人行駛路徑的規(guī)劃時(shí)間均低于400 ms,說(shuō)明文中方法不僅可以有效規(guī)劃?rùn)C(jī)器人行駛路徑,且規(guī)劃時(shí)間短,可滿足機(jī)器人路徑規(guī)劃實(shí)時(shí)性需求。文中方法在地圖存在障礙物情況時(shí)仍具有較高的規(guī)劃性能,可獲取滿足優(yōu)化目標(biāo)的最優(yōu)路徑,驗(yàn)證了文中方法具有較高的路徑規(guī)劃有效性以及可行性。
3 結(jié)束語(yǔ)
通過(guò)改進(jìn)人工魚群法實(shí)現(xiàn)機(jī)器人路徑規(guī)劃,利用自適應(yīng)視覺(jué)范圍以及擁擠度因子,提升改進(jìn)人工魚群法的全局搜索能力。將人工魚群法中的魚群歷史最優(yōu)位置利用公示牌記錄,避免由于人工魚群法中魚群游動(dòng)造成最優(yōu)點(diǎn)有所改變,無(wú)法穩(wěn)定問(wèn)題。通過(guò)實(shí)驗(yàn)驗(yàn)證該方法可在較少迭代次數(shù)快速獲取機(jī)器人全局最優(yōu)路徑。改進(jìn)人工魚群法可提升機(jī)器人路徑規(guī)劃實(shí)時(shí)性,為機(jī)器人路徑規(guī)劃提供科學(xué)、合理的理論依據(jù)。
猜你喜歡
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56