基于FPGA 的大型柔性太陽翼展開控制系統實現
2022-05-10 10:26:26姚惟琳張金娜
電子設計工程 2022年9期
關鍵詞:信號
鄭 悅,姚惟琳,侯 超,張 磊,張金娜
(上海宇航系統工程研究所,上海 201109)
隨著我國航天器對功率的需求越來越大,傳統的剛性、半剛性太陽翼很難在保證足夠大展開面積的同時滿足收攏包絡要求,根據空間站飛行器的需求,提出了具有展收功能的柔性太陽電池翼,其具有重量輕、比功率高的特點[1],空間站太陽電池翼與載人航天一期、二期相比,在展開方式上由原來的無源展開變為驅動器控制的有源展開,在柔性太陽電池翼有源展開過程中,伸展機構是實現柔性太陽電池翼展開的核心機構,伸展機構的展開與收攏過程復雜、內外部負載擾動比較大,屬于高擾動機構,控制系統需要平穩的速度,同時考慮到控制系統的小型化及集成化,因此該文設計了基于單片反熔絲型FPGA 實現PID 速度和電流雙閉環控制系統[2-5],削弱擾動對于系統穩定性的影響,并采用無刷直流電機作為驅動部件[6-9],考慮到長期在軌、多次的收展要求,采用旋轉變壓器進行換相和控制。
1 控制系統總體結構
系統結構框圖如圖1 所示,主要包括通信處理模塊、雙閉環PID 控制模塊、電流采集模塊及旋變速度計算模塊。該系統的工作方式如下:

圖1 系統結構框圖
1)通過串口RS422 發送總線控制指令,經過FPGA 內部的通信處理模塊,完成數據鏈路層、服務層及應用層的解析,將控制參數輸出給雙閉環PID控制模塊。
2)電機轉動過程中,電流采集模塊完成AD574芯片的控制及繞組電流的采集,測速模塊完成旋變AD2S80 位置數據的采集同時完成當前電機轉動速度的計算。
3)電機的啟動采用階梯波形,轉速逐級上升,制動方式采用直接停轉,當收到停轉指令或到位開關后立即停轉。
2 主要功能模塊的實現
2.1 通信處理模塊
通信接口芯片采用26C31、26C32 接口芯片,通信數據傳輸的接口形式為異步RS422[10-11],主要包括串口數據鏈路收發功能及服務層拆組幀功能,串口數據鏈路層根據串行通信的異步RS422 標準及每個字節的傳輸格式,完成字節的緩存。對接收到的服務層幀數據的合法性進行判斷,并實現拆幀功能,解析得到相應的控制指令,同時將遙測反饋的數據進行組幀,并將組幀的數據輸入到數據鏈路收發模塊,按字節傳輸格式進行發送。
2.2 電流采集模塊
該模塊完成直流有刷電機母線電流的采集,芯片采用AD574,選用手冊“STAND-ALONE”模式中的“低脈沖”形式,實現在一個電流閉環周期內完成4次ad 采樣求平均處理后,將12 位數據輸出給閉環控制模塊,閉環控制周期為208.333 μs,因此完成一次ad 采樣的時間不能超過52 μs,保證AD574 輸出數據的可靠性,采樣時刻設置大于51.33 μs,采樣時序控制如圖2 所示。

圖2 電流采樣控制時序
將4 次采樣的數據求和,為防止溢出,設置求和寄存器(r_s_ad_da)為14 位,同時為了提高電流采集精度,將上一電流閉環周期的低2 位數據與該次求和寄存器中的低2 位數據相加,若發生進位,則對高12 位數據加1,否則不加,并將該次低2 位求和值保存至下一次校準使用,最終輸出校準后的12 位電流數據(r_ad_da)到端口。
2.3 旋變速度計算模塊
該模塊完成電機轉子的位置采集,同時根據相鄰兩次采集的旋變數據進行當前電機轉速的計算,并根據旋變角度值,輸出對應的模擬霍爾信號到PWM 信號產生模塊。位置采集芯片選擇AD2S80,設置為16 位模式,每1 LSB 為0.005 5°。首先根據芯片手冊,在busy 信號下降沿后,完成16 位旋變數據的鎖存。
FPGA 計算速度模塊采用定時查找角度的方式來求解速度[12],計算頻率設置為4.8 kHz,伸展機構轉速計算如式(1)所示:

其中,f=4.8 kHz。
FPGA 采集的數字量與角度θ之間的關系如式(2)所示:

其中,X為經AD2S80 轉化后,FPGA 采集到的數字量。

其中,|Xi-Xi-1|為兩次旋變采集數字量之差。
因此,旋變采集模塊調用一次乘法器模塊,并將得到的結果進行右移8 位操作,完成除法運算,即可得到當前電機的轉動速度。
為了提高計算的速度值的可靠性,同時對計算獲得的速度進行16 個數滑動窗取平均值,并增加去除野值速度的功能,剔除異常轉速。對于伸展機構轉速為零的判斷,規定在-2~2 rpm 區間內都認為伸展機構轉速為零。
該旋變為5 極對數,每個極對數對應72°,每個極對數內劃分為6 個象限,每個象限對應12°,每12°為一個角度區間,共30 個角度區間。設置查找表,將360°劃分為30 個角度區間,分別對應模擬Hall 信號的A、B、C 信號的Hall 編碼。根據采集的旋變值,通過查找表確定其Hall 編碼,輸出給無刷電機PWM生成模塊。查找表如表1 所示。

表1 模擬Hall信號與角度對應表
2.4 雙閉環PID控制模塊
2.4.1 PID調節器原理
PID 調節器是應用最廣泛、技術最成熟的一種控制方法,是一種線性控制器,根據給定值r(t)與實際輸出值y(t)構成控制偏差,如式(4)所示:

將偏差進行比例、積分、微分運算,通過一定規律的線性組合構成控制量u(t),對被控量進行控制[13-15],如式(5)所示:

用FPGA 實現PID 控制算法必須用數值逼近方法,當采樣周期相當短時,用求和代替積分,對PID算法進行離散化處理,同時該文根據電機的動態響應情況以及FPGA 的邏輯資源有限,速度環采用只有P 與I 功能的PI 調節算法,電流環采用只有P 功能的調節算法,來完成速度、電流雙閉環功能,將上述公式離散化,歸并處理得:

此處利用乘法分配率,提前把誤差與KC相乘,然后累加所得積,即由原來的變成。這樣帶來的好處是FPGA 算法控制簡單,同一個Err分別乘以KP與KI,然后再進行計算。
2.4.2 PID調節器的實現
該文閉環控制模塊采用速度和電流雙閉環的結構,其中速度環為外環,電流環為內環,速度調節器采用PID 控制算法實現,增強抗干擾能力,根據給定速度和反饋的速度做出反應,提高調速精度,電流調節器也采用PID 算法實現,快速跟蹤給定電流,對擾動引起的干擾進行實時快速響應。基于式(6),閉環控制實現結構圖如圖3 所示。
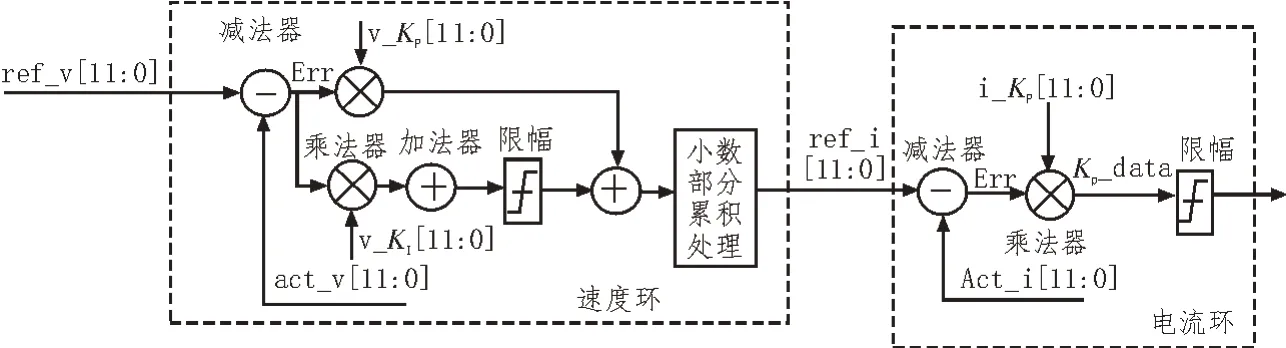
圖3 閉環控制實現結構圖
首先在PID 計算前,先將通信處理模塊的給定速度值與旋變采集模塊反饋的速度值進行鎖存處理,保證每個控制周期內參數的一致性,然后將給定速度值與反饋速度值作偏差,經過速度v_KP系數調節,將速度偏差進行放大或縮小,同時速度偏差經過v_KI系數進行微調節并累加,得到積分結果,將積分后結果進行限幅處理,為了消除靜態誤差,采取小數部分累加處理,即每次計算的結果分為整數部分與小數部分,但只輸出整數部分,為了不丟失小數部分,將每次計算得到的小數部分累積,當某次累積和達到進位后,進行進位并減掉進位部分,繼續累積,整數部分在原有整數部分基礎上加1,最終將比例與積分的和經過限幅后輸出給電流環模塊,將其作為電流環的參考電流。電流環比例調節的實現與速度環比例調節的實現一致,根據控制周期信號,先將參考電流值與反饋電流值進行鎖存,再進行偏差計算及比例i_KI系數的調節,最后經過限幅輸出相應的控制信號給PWM 信號產生模塊。
2.5 PWM信號產生模塊
無刷直流電機驅動芯片采用IR2110+MOSFET構成三相橋式電路[16],FPGA 輸出電機驅動PWM 斬波信號,經過IR2110 功率放大后作用到MOSFET,最終產生電機繞組電流,每相繞組分別對應一片IR2110 芯片,三相橋式電路如圖4 所示。
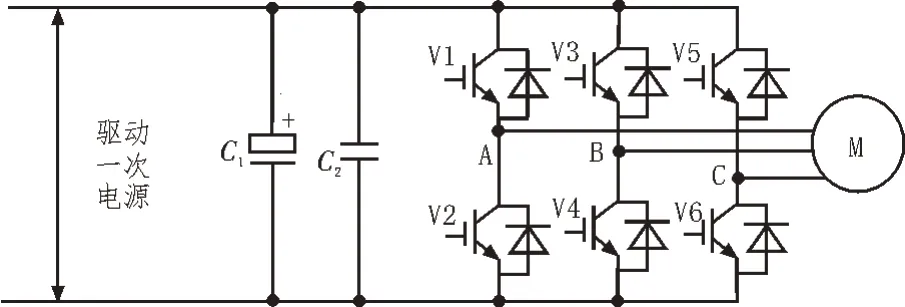
圖4 三相橋式電路
控制方案上采用兩相導通六狀態控制方式,同一時刻由兩繞組導通,每相導通角為120°電角度,每隔60°電角度有一相繞組改變開關狀態,因此在一個電周期內共存在6 個導通狀態。根據電流環計算模塊輸出的結果以及旋變采集模塊輸出的模擬三相霍爾信號,按照兩相導通六狀態運行的可逆換相邏輯真值,最終輸出六路PWM 控制信號,上橋臂為PWM時,對應下橋臂采用反向PWM,將上、下橋臂PWM信號的死區時間設置為1~5 μs,保證H 橋電路不會發生短路的情況,兩相導通六狀態換相邏輯真值表如表2 所示。

表2 兩相導通六狀態換相邏輯真值表
3 測試驗證情況
3.1 仿真驗證
該設計選用Actel 公司的7.2 萬門反熔絲FPGA芯片,工作時鐘為24 MHz,仿真軟件為Modelsim。利用VHDL 語言模擬位置及電流檢測模塊,通過速度計算模塊、電流采集模塊、雙閉環控制模塊,最終生成PWM 信號,利用Modelism 進行仿真得到不同模塊的仿真波形如圖5 所示,從圖中可以看出,根據輸入的旋變數據,完成了速度計算及模擬三路霍爾信號的產生,將經過控制算法后的PWM 驅動信號最終輸出給驅動電路。

圖5 仿真結果
3.2 試驗結果
仿真測試后,將目標碼燒錄到驅動器內,連接伸展機構模擬器進行測試,控制系統工作正常,在帶載情況下的速度、電流波形曲線如圖6 所示,從圖中可以看出,機構轉動速度曲線平穩,穩定性優于5%,電流波形平滑,滿足指標要求。

圖6 上位機實測波形曲線
4 結束語
該文以單片反熔絲型FPGA 為處理器,實現了PID 控制算法的速度與電流雙閉環控制,通過工程樣機驗證了該控制方案能夠有效地消弱柔性太陽翼展開過程中擾動對于速度穩定性的影響,使伸展機構運動過程中速度、電流平穩,同時也適應了飛行器產品小型化的需求,為后續相關宇航型號產品的研制提供參考。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
