執行器跳變故障的失效衛星軌跡跟蹤控制
2022-05-11 07:55:56路陽蔡彬喬道鵬付艷明張卯瑞
西北工業大學學報 2022年2期
路陽, 蔡彬, 喬道鵬, 付艷明, 張卯瑞
1.哈爾濱工業大學 控制理論與制導技術研究中心, 黑龍江 哈爾濱 150001;2.北京電子工程總體研究所, 北京 100854
在軌衛星在運行時,系統元部件不可避免地會出現故障情況,從而導致衛星失效。將在軌失效的衛星捕獲后進行修復或者燃料加注等操作,可以提升其工作效率,這對衛星產業的可持續發展具有重要意義[1-2]。與失效衛星進行交會對接是實現上述在軌操作的關鍵性技術,對該問題的研究已經成為一個熱點。目前,國內外學者對這一問題展開了一系列研究。文獻[3]利用參量Lyapunov方程,設計了交會過程中執行器受限情況下的控制器,其目的是改變系統的增益以改善系統的動態性能。文獻[4]針對衛星近距離段交會對接過程中的姿軌耦合控制問題,利用滑模自適應控制方法設計了一類六自由度姿軌一體化控制器。文獻[5]考慮衛星在攔截任務過程中,系統所面臨的參數不確定性和干擾情形,設計了使系統魯棒穩定的控制器。文獻[6]研究了防止碰撞約束下最小能量的連續推力交會對接。文獻[7]研究了近地軌道電磁衛星編隊飛行中的控制問題,提出了一種自適應控制律使得編隊可以保持和重構。文獻[8]考慮衛星沿橢圓軌道運行時的近距離交會軌跡安全問題。
當在軌運行衛星的執行部件發生故障時,可能會使得系統失穩,從而增加控制難度。本文以文獻[9]中衛星軌跡跟蹤控制的參數化方法為基礎,提出了跳變控制輸入的方法來解決這一問題。該方法基于Markov跳變系統,利用Markov跳變性質的輸入,對執行器發生故障的衛星進行軌道控制。有關Markov跳變系統方面的研究,文獻[10]研究了Takagi-Sugeno(T-S)模糊型跳變系統的保性能控制問題。文獻[11]研究了帶有乘性噪聲和具有Markov跳變參數的隨機離散周期系統的魯棒控制問題。文獻[12]研究了跳變系統的二次型穩定性問題,并且給出了其在RLC電子電路中的應用。文獻[13]對含有有限能量干擾的Markov跳變系統進行了研究,給出了此類跳變系統的模型跟蹤控制問題的一種有效解法。文獻[14]研究了系統含隨機擾動以及轉移概率未知但是有界情況下離散跳變系統的H∞控制問題,以LMI的形式求解了狀態反饋控制器。
Markov跳變系統具有隨機特性并且易于建模,當衛星執行器發生跳變故障時可以用Markov跳變理論進行建模。在衛星的相對軌道控制中加入具有Markov跳變性質的控制輸入,就可以在可控的情形下對衛星的相對軌道運動進行控制。
綜上所述,本文提出了執行器跳變故障的失效衛星軌跡跟蹤控制問題,并將所設計的控制器應用于衛星在軌交會任務中,給出了相應的仿真結果與分析。
1 問題描述
考慮在圓軌道運行的衛星,當其執行器發生跳變故障時,描述衛星近距離相對運動模型將變為如下形式

(1)
式中
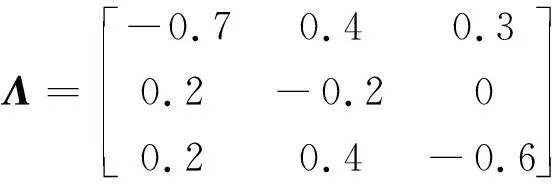
矩陣中的ω是目標衛星的軌道角速度。d(t)∈L2[0,∞)是擾動信號,M(γ(t))是擾動矩陣。{γ(t),t≥0}表示與執行器故障模態相關的Markov隨機過程,該隨機過程在有限可數集S={1,2,…,N}中取值,S為故障可能出現的模態集合。故障模態的轉移概率Λ為
Pr{γ(t+h)=j|γ(t)=i}=

引入如下形式的矩陣來描述衛星執行器的故障情況
F(γ(t))=diag(fi1,fi2,fi3)
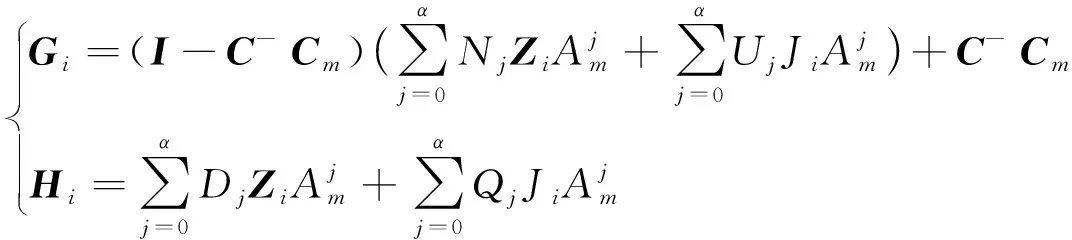
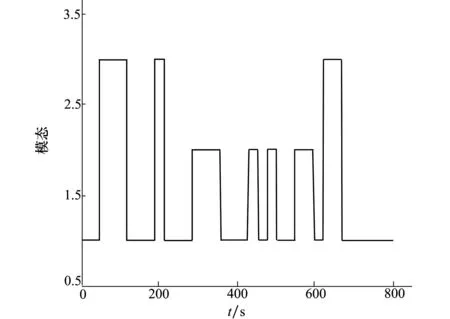
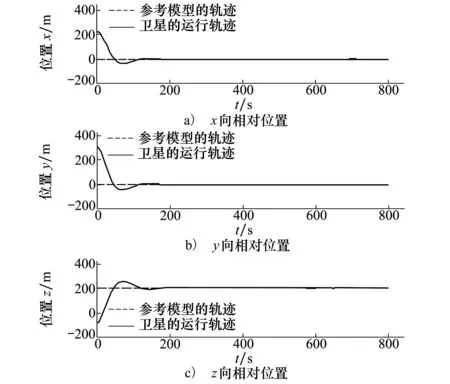
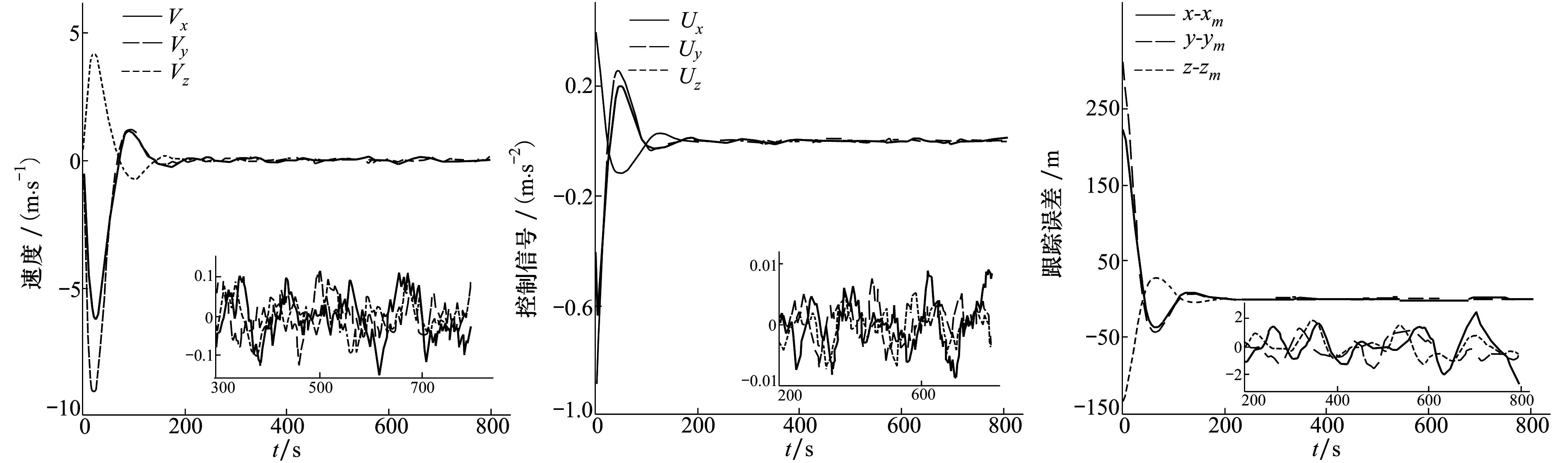
式中:0≤fil≤1,(l=1,2,3分別表示x,y,z方向);當執行器處于模態γ(t)=i時,定義fil=0表示l方向執行器完全失效;0 B(γ(t))=BF(γ(t)) 式中 考慮失效衛星系統(1),在狀態反饋控制的作用下,其閉環系統為 (2) 當其故障模態處于γ(t)=i時,為了書寫方便記 Ki是使得系統(2)隨機穩定的狀態反饋增益矩陣。 定義1考慮失效衛星系統(2),若對所有初始條件x(0)=x0和γ(0)=γ0∈S,有不等式 成立,則稱系統(2)是隨機穩定的。 定義2給定標量r>0,如果對任意非零干擾d∈L2[0,∞),衛星系統(2)是隨機穩定的且在零初始條件下,干擾d到輸出y的傳遞函數滿足 (3) 成立,則稱該系統是隨機穩定的并且滿足H∞性能指標r。 本文主要研究失效衛星近距離軌跡跟蹤控制問題,其要求是閉環系統隨機穩定且能夠實現對給定信號的跟蹤,因此,可將該問題歸為一個模型參考跟蹤控制問題。通常情況下,參考信號可由以下線性連續參考模型系統生成 (4) 式中:xm(t)∈R3×1和ym(t)∈R3×1分別是參考模型系統的狀態向量和輸出向量;R表示實空間;Am和Cm是給定的相應維數的系統矩陣。 面向失效衛星的相對軌道跟蹤控制問題: 給定失效衛星系統(1)和參考模型(4),設計反饋加前饋形式的控制器 u(t)=Kix(t)+Kmixm(t) (5) 式中,Km(γ(t)=i)=Kmi是前饋補償器的增益矩陣,使得 1) 衛星系統(2)是隨機穩定的; 2) 輸出向量y(t)在均方意義下跟蹤上參考模型的輸出ym(t),也就是對任意初值x(0),xm(0)和γ(0)使得如下不等式成立 文獻[9]給出了執行器正常情形下的控制器存在條件,本文將該條件推廣到了執行器發生跳變故障情形。以下是執行器發生跳變故障時的控制器存在條件。 推論1控制器有解的充要條件是:在失效衛星系統(2)是隨機穩定的前提下,存在矩陣Gi∈R6×3和Hi∈R3×3(i=1,2,…,N)滿足下面的矩陣方程組 (6) 則前饋補償增益矩陣可表示為 Kmi=Hi-KiGi (7) 由控制器的形式(5)可知,需設計狀態反饋控制律和前饋補償器。下面對狀態反饋控制律和前饋補償器分別進行設計。 定理1在衛星系統(2)當中,如果存在一組依賴于故障模態i的矩陣Wi和對稱正定矩陣Xi,i=1,2,…,N,滿足如下線性不等式成立 (8) 式中: (9) 證明當系統(2)的干擾不為零時,為了得到衛星的H∞性能指標,定義變量Ξ (10) 選取依賴于故障模態i的Lyapunov函數Vi=xTPix,在零初始條件下,由Vi|t=0=0可得 成立。其中 (11) 進一步,考慮到衛星控制中存在輸入上限的約束,為保證系統正常工作,定義約束條件 ‖u(t)‖2≤umax (12) 式中,umax是系統的最大控制輸入,表示衛星的執行器能夠提供的最大加速度。基于輸入受限的失效衛星H∞狀態反饋控制律由以下定理給出。 定理2衛星系統(2)是H∞隨機穩定的并且同時滿足(12)式的充分條件是存在一組依賴于故障模態i的對稱正定矩陣Xi和一組矩陣Wi,滿足如下LMI條件 (13) (14) (15) 式中,ρ為給定的正數。此時,相應的狀態反饋控制律的增益矩陣可表示為 (16) 證明關于(15)式和控制器(16)式的證明,定理1已給出證明,這里不再贅述。參照文獻[15]中的相關定理直接給出另外2組LMI條件(13)式和(14)式的證明。 對每一個模態i定義一個Lyapunov函數Vi(x(t))=xT(t)Pix(t),考慮輸入約束條件(12),假設初始條件滿足xT(0)Pix(0)≤ρ,ρ為一個給定正值。則對于t>0有 xT(t)Pix(t)≤xT(0)Pix(0)≤ρ (17) (18) 聯合(17)和(18)式,由Schur補引理可以得到 (19) 同樣根據Schur補引理,初始條件xT(0)Pix(0)≤ρ可以寫為 (20) 在對干擾抑制過程中,總希望有最好的抑制效果,所以在狀態反饋控制律的設計過程中,需要在滿足定理2中LMI條件的情況下,盡量找到干擾抑制界r的最小值。關于r的求解由以下推論給出。 推論2衛星系統(2)是隨機穩定的并且對干擾抑制界r的求解,可轉化為如下優化問題: minr (21) 此時狀態反饋控制器的增益矩陣可表示為(16)式的形式。 前饋補償器的作用是滿足對給定信號的跟蹤。文獻[16]通過對非齊次廣義Sylvester矩陣方程組的求解,獲得了前饋補償器的參數化表達形式。這部分參照文獻[16]當中對前饋補償器的求解方法,類似地可以得到矩陣Gi和Hi(i=1,2,…,N)的一組參數化通解表達式為 (22) 式中,矩陣Zi∈R3×3是任意參數矩陣,代表參數化通解的自由度。具體求解過程以及(22)式中相關矩陣的定義可以參考文獻[16],限于文章篇幅,不再贅述。 本文針對失效衛星所求解的模型參考跟蹤控制核心問題就是設計控制器u(t)使其能保證系統是魯棒H∞隨機穩定的,并且能夠滿足對給定指令的跟蹤。接下來給出失效衛星控制器求解的詳細算法: 第1步 選取參考模型的參數矩陣Am,Cm以及干擾矩陣Mi; 第2步 求解狀態反饋控制律。利用線性矩陣不等式(21),解出最小的干擾抑制界r,以及矩陣Xi和Wi; 第4步 求解前饋補償器,利用(22)式求解矩陣Gi和Hi; 第5步 由(7)式計算前饋補償器增益矩陣Kmi=Hi-KiGi。 本文考慮目標衛星運行在地球同步軌道,其軌道參數:軌道周期T=86 164 s,軌道角速度ω=7.292 1×10-5rad/s,半徑R=4.224 1×107m。接下來考慮失效衛星的執行器發生跳變故障情形,假定執行器出現以下3種故障模態:①f11=f12=f13=1,表示衛星所有執行器工作正常;②f22=0.85,f21=f23=1,表示衛星在y方向上執行器部分失效,其他方向執行器正常工作;③f33=0.85,f31=f32=1,表示衛星在z方向上執行器部分失效,其他方向執行器正常工作。則跳變輸入矩陣Bi可以表示為 轉移概率矩陣為 將失效衛星系統中存在的擾動d模擬為白噪聲干擾,干擾矩陣取為 接下來選取衛星系統的初始狀態值為x(0)=[225 312 -143 0 0 0]T。假定衛星的執行器能提供的最大加速度為umax=3 m/s2。參考模型選取Am=03×3,Cm=I3×3。設置仿真時間800 s,仿真結果如下所示。 圖1是衛星系統的執行器隨著時間發生跳變故障的3種情形,衛星的執行器隨著時間的變化,在3個模態之間進行切換,執行器出現故障的情形具有一定隨機性。 圖1 執行器的故障模態 圖2 衛星相對距離 圖2和圖3為跟蹤衛星和目標衛星的相對位置和相對速度曲線。由圖2和圖3可知,跟蹤衛星和目標衛星相對距離和相對速度在大約前200 s內均大幅度減小。由于初始時刻兩衛星間的位置存在偏差,因此衛星在前200 s內以較大的速度進行軌道機動,以消除偏差,隨后以約0.1 m/s的速度進行微調,兩衛星間相對位置也進一步減小。 圖4為衛星所施加的控制信號,由于初始時刻兩星相對位置存在較大偏差,因此前200 s內執行機構施加的控制信號較大,隨后衛星約以0.01 m/s2的控制信號繼續向目標低速緩慢接近。圖4說明失效衛星系統(1)和控制器(5)所組成的閉環控制系統是隨機穩定的。 圖5為位置跟蹤誤差,由圖可知,衛星系統存在白噪聲干擾情形下,穩態跟蹤誤差大約為2 m。這驗證了本文所設計的模型參考跟蹤控制器的有效性。即本文所設計的控制器能夠使得失效衛星完成對給定指令的跟蹤。 圖3 衛星相對速度 圖4 控制信號 圖5 跟蹤誤差 本文討論執行器故障情形的失效衛星軌跡跟蹤控制問題。建立了含有跳變參數的衛星相對運動數學模型,采用跳變系統隨機穩定性的充要條件與模型參考跟蹤控制思想給出了在隨機切換控制下的模型參考跟蹤控制器的存在條件,并利用LMI方法和矩陣方程理論提出了失效衛星控制器的設計算法。所設計的控制器中包含自由參數矩陣,可以通過該參數矩陣對控制器進行進一步優化。數值仿真結果表明在失效衛星系統存在白噪聲干擾時,所設計的控制器能夠快速、準確地完成對給定指令的跟蹤。
2 主要結果
2.1 模型參考跟蹤控制器的存在條件
2.2 魯棒H∞狀態反饋控制律設計




2.3 前饋補償器的設計
2.4 控制器求解算法
3 仿真校驗
4 結 論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
汽車維修與保養(2015年6期)2015-04-17 03:31:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
汽車維護與修理(2015年2期)2015-02-28 12:15:39
