基于四相全橋的磁懸浮軸承開關器件開路故障容錯控制策略
2022-05-13 11:43:10孫宏博楊佶昌
電工技術學報 2022年9期
關鍵詞:故障
胡 烽 孫宏博 蔣 棟 楊佶昌
(強電磁工程與新技術國家重點實驗室(華中科技大學) 武漢 430074)
0 引言
相比于機械軸承,磁懸浮軸承具備無機械接觸、無磨損、無需潤滑等突出優點,因此在高速旋轉機械領域,如飛輪儲能、渦輪機機械、醫療設備、航空航天等領域被廣泛應用。在高速旋轉應用場合,可靠性無疑是最為關鍵的性能指標之一,而提高磁軸承系統可靠性的一種有效辦法是采用容錯控制技術[1-7]。
目前國內外學者針對磁懸浮軸承系統容錯控制主要集中在線圈容錯控制、傳感器容錯控制及功放容錯控制等幾個方面。而其中大多數的容錯策略采用的是冗余備份和控制器重構的方法,如1995年E. H. Maslen等學者針對線圈容錯控制在文獻[8]提出磁軸承偏置電流線性化理論,基于定子線圈的冗余,在某個或幾個線圈損壞的情況下,可以通過重構電流分配陣在定子內重新分配磁通量來實現線圈的容錯,但這是以犧牲磁軸的承載能力帶來的可靠性。在此理論基礎上,許多學者也進行了拓展與優化[9-12]。在傳感器容錯控制方面,除冗余備份的方法之外,自傳感技術由于在成本上極具優勢也被廣泛研究[13-15]。而針對功放容錯控制則研究的較少,但這并不意味功放容錯沒有應用價值。事實上,磁軸承電力電子功放中的電力電子器件是系統最易失效的部件之一。為了減少開關紋波,提高系統動態響應,開關器件工作頻率一般在10~100kHz之間,這要求開關器件頻繁地在不同狀態下進行切換,極易因過熱、過電壓、過電流等原因發生開路或短路故障,進而導致轉子在高速旋轉過程中跌落,產生巨大的沖擊和劇烈的振動。同時驅動的失效也會導致功率器件不能正常開關。有調查表明,工業應用中變頻器約38%的故障來自功率半導體開關器件的損壞[16]。
在此背景下,本文將容錯對象重點放在了功率放大器拓撲。首先簡單介紹了近年來涌現的各類新型功放拓撲,從器件成本、容錯能力等方面對它們進行了比較。四相四橋臂拓撲相較于其他拓撲在調制方式上未發生根本性改變,而且成本優勢明顯。但由于不具備容錯能力,可靠性低,所以本文將其拓展為四相全橋拓撲,并針對該拓撲提出了相應的容錯控制策略以提高其工作可靠性并更好地滿足市場需求。
1 功率放大器研究概況
主動磁懸浮軸承(Active Magnetic Bearings, AMB)系統是由電磁鐵(定子)、轉子、位移傳感器、控制器和功率放大器組成的閉環反饋系統。圖1所示為磁懸浮軸承控制系統框圖。

圖1 磁懸浮軸承控制系統框圖 Fig.1 Block diagram of AMB control system
磁懸浮軸承控制系統的基本工作原理為:當轉子實際位置與參考位置之間產生偏差時,位移傳感器檢測到偏移量并將其轉換成電信號發送給控制器,控制器根據誤差信號計算出參考電流指令,然后經功率放大器輸出實際流經電磁線圈的電流,進而產生期望的電磁力以維持轉子穩定懸浮在參考位置。功率放大器在這其中所扮演的角色至關重要,它需要快速地對控制器輸出的控制信號做出反應,其性能的穩定性直接影響著整個控制系統的性能。
目前磁軸承功率放大器拓撲結構多采用三相全橋拓撲結構,該結構可用來控制單自由度磁軸承,相比于傳統的H全橋拓撲,其減少了約25%的開關器件。為進一步降低器件成本,文獻[17]利用主動磁軸承線圈流經單極性電流的特點提出了三相半橋拓撲,它有兩種結構,如圖2c、圖2d所示,都是將中間橋臂作為公共橋臂去控制一對線圈,流經線圈的電流由偏置電流和控制電流組成。文獻[18]利用上述兩種三相半橋拓撲結構做容錯控制,基本思路為當b-t-b結構中的開關器件出現開路故障時,可切換至t-b-t結構使功率放大器繼續正常工作。但對于三相半橋拓撲而言,由于兩線圈的偏置電流都流經公共橋臂,存在電流應力過大的缺點,文獻[19]針對四自由度磁軸承系統提出了反向共橋臂拓撲,如圖2e所示,其將一半的線圈反向,使兩個方向的電流在公共橋臂中和,很好地解決公共橋臂電流應力過大的問題。而對同一平面兩軸磁軸承采用反向共橋臂結構時,反向橋臂電流之和對消,共橋臂電流近似為零,文獻[20]提出的四相四橋臂拓撲結構即是利用此思路進一步減少了開關器件數量,如圖2f所示,用四個橋臂即可控制兩對線圈實現雙自由度磁軸承的懸浮,做到了器件的最優化使用。但上述反向共橋臂拓撲與四相四橋臂拓撲采 用的均是單極性橋臂,任何一個開關器件發生開路故障都會導致相應的線圈電流不可控,因此它們均不具備容錯能力。而且由于四相四橋臂拓撲結構的 特性,線圈電流天然耦合,開關器件故障所帶來的影響將更為惡劣,所以本文在四相四橋臂拓撲的基礎上將其拓展為四相全橋拓撲(見圖2g)使其具備容錯能力。

圖2 功率放大器拓撲結構 Fig.2 Topologies of power amplifier in AMB drive
上述各個拓撲應用于四自由度磁軸承系統的器件數以及容錯能力對比見表1。

表1 應用于四自由度磁軸承的各個拓撲器件成本及 容錯能力對比 Tab.1 Comparison of device cost and fault tolerance with different topologies for a four-axis magnetic bearing system
由表1可知四相全橋拓撲雖在器件成本上不是最優的,但結合容錯能力、成本等因素,在綜合性能上,四相全橋拓撲相比于四相四橋臂更具競爭力。
實際上,在四相四橋臂的開關管兩端并聯冗余開關管,并在發生開路故障后切換過去也可以實現容錯控制并且不需要電流反向。但是磁軸承中廣泛應用的全橋功率模塊可以直接應用于電流反向容錯而不需要并聯額外的分立器件,在故障情況下四相全橋模式下的備用器件比并聯冗余器件具有更可靠的容錯性能。本文主要針對的是采用電流反向的全橋容錯電路,對于并聯冗余開關管的方式不做進一步討論。
2 四相全橋工作特點

圖3 徑向雙自由度磁懸浮軸承線圈結構 Fig.3 The coil structure of two radial axis AMB
四相全橋磁軸承控制器可以控制磁軸承中兩軸四個繞組的電流。圖3展示了徑向雙自由度磁軸承的定子線圈分布,x、y兩個自由度分別由A1、C1和 A2、C2兩組線圈所控制。每組線圈電流之和ia1+ic1稱為共模電流,目的是給轉子提供偏置磁通,每組線圈電流之差ia1?ic1稱為差模電流,用于控制該方向上的電磁力。實際控制過程中可設定兩組共模電流ia1+ic1、ia2+ic2為定值,兩組差模電流ia1?ic1、ia2?ic2分別控制x、y方向的電磁力。
四相全橋變換器如圖4所示。圖4左半部分為AMB系統中功率放大器的主要組成部分,由四相全橋拓撲和直流電源組成。右半部分為磁軸承線圈的簡化模型,由于線圈內阻遠小于其阻抗值,為簡化分析,忽略線圈內阻且假定線圈電感值一致。

圖4 四相全橋變換器 Fig.4 Four-phase full-leg converter
由圖4可知,四相全橋拓撲相當于兩個四相四橋臂拓撲的組合。因為單個四相四橋臂就已經具備了控制雙自由度磁軸承的能力,所以當St1、St2、Sb3、Sb4開關管組成的四相四橋臂在正常工作時,St3、St4、Sb1、Sb2開關管組成的四相四橋臂可作為冗余備份。二者最大的差異在于控制的線圈電流是反向的,但這并不會影響磁軸承的正常工作。因此在分析四相全橋拓撲的工作原理時只需要分析其中一套四相四橋臂的工作原理即可。
圖4中,v0為中性點電壓;v1、v2、v3、v4為4個橋臂中點電壓;Vdc為直流母線電壓;ia1、ic1、ia2、ic2為各線圈的電流。
2.1 工作模態
假設開關管導通狀態為1,關斷為0,則圖4橙色開關管組成的四相四橋臂拓撲有16種開關狀態。當開關管St1、St2、Sb3、Sb4全開時,即狀態1111。此時中性點電壓v0為0.5Vdc,將圖4中虛線電流流經方向作為參考方向,則各線圈電壓有
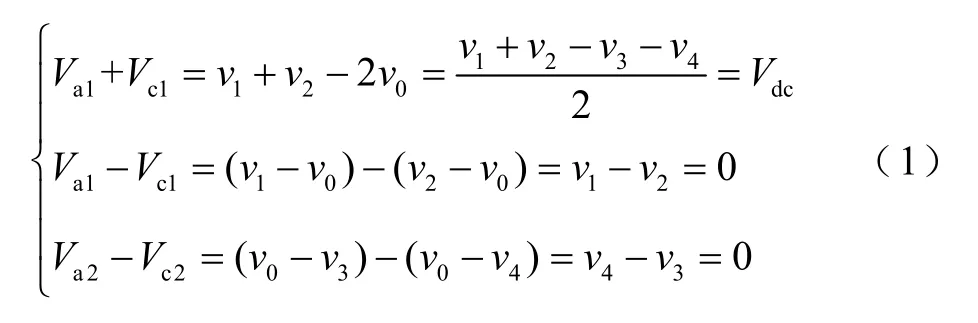
由此可見該模態下,共模電流迅速上升,差模電流處于續流狀態,適用于磁軸承偏置電流上升階段。
同理可分析出其余15種模態下共模電壓與差模電壓的標幺值。

表2 工作模態 Tab.2 The modes of working
以Va1+Vc1、Va1?Vc1、Va2?Vc2方向建立三維坐標系,16個電壓矢量的空間位置如圖5所示。
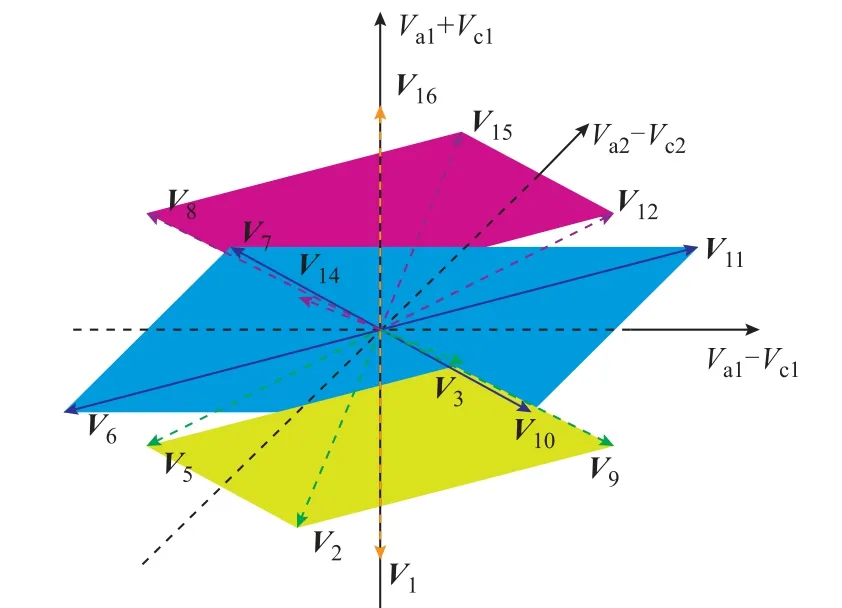
圖5 16個電壓矢量的空間位置 Fig.5 Spatial position of 16 voltage vectors
分析圖5可知,任意方向的共模電壓、差模電壓都可由上述16個電壓矢量合成得到,即四相四橋臂拓撲具備控制徑向雙自由度磁軸承穩定懸浮的能力[20]。
2.2 開路故障
在四相全橋功放的各個部件中,電力電子器件是最易發生故障的部件之一,而器件的開路故障又是常見的失效模式。電力電子器件封裝中鍵合線因為運行中的熱循環導致疲勞脫落是典型的開路故障模式,另外,器件的門極驅動失效也會帶來類似開路故障的效果。因此有必要對四相全橋拓撲中的開關器件出現開路故障后的現象進行分析,并據此提出相應的容錯控制策略來避免開路故障造成的嚴重后果。
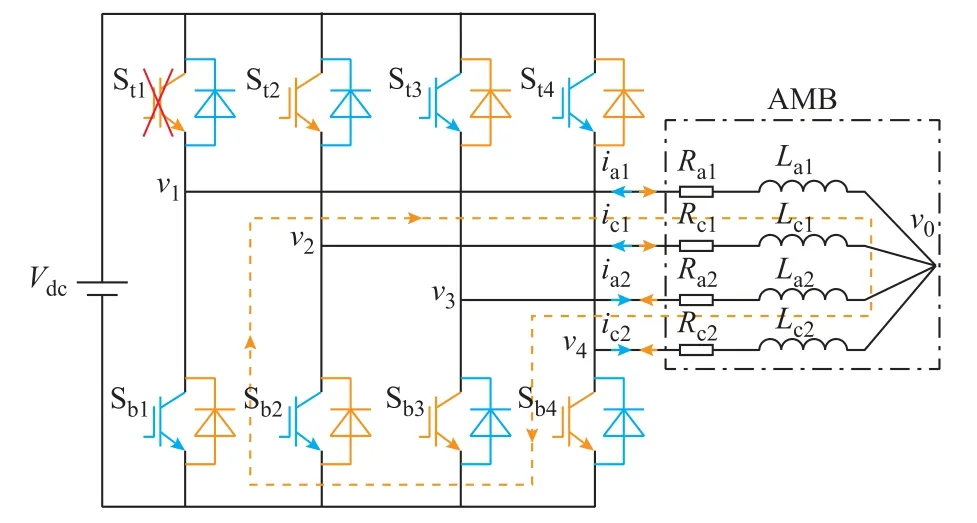
圖6 故障橋臂電流流通路徑 Fig.6 The current path of fault bridge
為了減小電流紋波,四相全橋拓撲采用的調制方式為相反載波調制[16-20],其特點是開關管St1、St2的驅動信號與開關管Sb3、Sb4的驅動信號相位相反,且占空比均在0.5附近波動,這使得磁軸承穩定懸浮時,四相全橋拓撲的大部分時間都處于V4(0011)、V13(1100)這兩種電壓矢量之間切換。由表2可知,這種調制方式使得共模電壓、差模電壓盡可能為0,可以顯著降低電流紋波。
由于位置環的響應速度遠小于電流環的響應速度,因此在St1發生開路故障后的極短時間內,轉子位置不會發生較大變化,各開關管的驅動信號占空比依然穩定在0.5附近。但此時由于St1的開關狀態一直為0,這就使得四相全橋拓撲穩態工作下的V13(0100)電壓矢量轉變為V5(0100)電壓矢量。由表2可知,在V5(0100)電壓矢量下,Va1+Vc1為-0.5Vdc,Va1?Vc1為?Vdc,Va2?Vc2為0,因此共模電流ia1+ic1與差模電流ia1?ic1均會在續流與下降這兩種狀態之間切換,且ia1?ic1下降速度更快,而差模電流ia2?ic2則會一直處于續流狀態。
差模電流ia1?ic1不可控的下降將造成x方向電磁力不受控,轉子向線圈C1方向跌落。此時因線圈電流ic1仍可控,其幅值必須下降來抵消轉子向自身方向跌落的趨勢。因此St2的驅動信號占空比會不斷下降直至為0,線圈電流ia2、ic2由于耦合的作用最終也會趨于0。
按照上述分析思路,同理可以得到其余開關管發生開路故障后的共模/差模電流變化趨勢,見表3。

表3 不同開關管開路故障后的共模/差模電流變化趨勢 Tab.3 The trend of common mode/differential mode current after open-circuit fault of different switches
分析表3可知,任何一個開關管發生開路故障,共模電流ia1?ic1都呈下降趨勢,且下降速度一致,而差模電流ia1?ic1、ia2?ic2變化趨勢卻因故障開關管的不同有很大差異。因此可以通過設定共模電流的下限閾值作為開路故障的判斷條件,通過觀察差模電流變化趨勢判斷故障開關管位置以方便檢修。
3 四相全橋容錯控制策略
針對四相四橋臂變換器的開路故障隱患,本節利用四相全橋拓撲的冗余器件實現開關器件開路故障下容錯控制,四相全橋容錯控制系統框圖如圖7所示。

圖7 四相全橋容錯控制系統框圖 Fig.7 The control system block diagram for four-phase full-leg topology
3.1 兩種控制模式
四相全橋拓撲的兩種工作模式如圖8所示,四相全橋的開關器件配置相當于兩套四相四橋臂拓撲的組合。當開關管St1、St2、Sb3、Sb4被驅動時,開關管Sb1、Sb2、St3、St4被封鎖,此時線圈電流ia1、ic1從橋臂流向中性點,線圈電流ia2、ic2從中性點流向橋臂,該種工作模式稱為正常模式,如圖8a所示。當開關管Sb1、Sb2、St3、St4被驅動時,開關管St1、St2、Sb3、Sb4被封鎖,此時組成的拓撲結構相當于反向的四相四橋臂,ia1、ic1從中性點流向橋臂,ia2、ic2從橋臂流向中性點,該種工作模式稱為冗余模式,如圖8b所示。

圖8 四相全橋拓撲的兩種工作模式 Fig.8 Two working modes of four-phase full-leg topology
本文容錯控制策略的基本思路為:當處在工作模式下的開關管發生開路故障時,將切換至冗余模式,控制流經線圈的電流反向以保證磁軸承不失穩,而能夠成功切換且轉子位移不發生較大波動主要有以下三方面的原因:①磁軸承受到的電磁力大小與電流的二次方成正比,與流經線圈的電流方向無關[1];②實際應用于磁軸承功率放大器的開關元件多采用IGBT模塊或智能功率模塊(Intelligent Power Module, IPM),這些模塊中的IGBT都有獨立的分塊,且均帶有并聯的續流二極管,單個開關元件故障時并不會影響其他元件;③磁軸承在開關管發生斷路故障時,其機械運動的跌落時間相比開關周期而言是十分緩慢的。
3.2 開路故障判斷條件及檢測時間
當磁軸承穩定懸浮時,控制同一自由度的一對線圈電流之和始終為2ibias。

因此可根據控制同一平面(兩個自由度)的四個線圈電流之和來判斷開關元件的故障形式,分別選取電流之和的上限閾值iuth和下限閾值ilth。由2.2節的分析可知,當電流之和下降到小于ilth即可認為開關元件發生開路故障,此時切換至冗余模式,磁軸承仍可正常工作。
當電流之和超過iuth可認為開關元件發生短路故障,此時若將工作模式切換至冗余模式,由于故障開關管仍會直通,線圈電流同樣不可控,所以對磁軸承的穩定控制并無實際效果,此時只有從硬件層面上快速封鎖開關管才能減少二次故障的危害。事實上,文獻[21-22]表明,將高速熔斷器應用在開關管中,開關管短路故障可轉變為開路故障,此時仍可利用開路故障診斷方法加以處理,所以本文僅從開關管開路故障的角度提出相應的容錯控制策略。
由上述分析可知,共模電流ia1+ic1的下降速度與下限閾值ilth的取值決定了開路故障的檢測時間。

根據式(3),共模電流的變化速率與共模電壓Va1+Vc1成正比,與線圈電感L成反比。線圈電感雖隨轉子位置有微弱變化,但可忽略不計,因此共模電流的變化速率只受共模電壓的影響。
由2.2節分析可知,在St1發生開路故障極短的一段時間內,St2驅動信號t2g的占空比可近似為0.5,所以在一個開關周期內,V4(0011)、V5(0100)兩個電壓矢量的作用時間各占一半,共模電壓在0與-0.5Vdc之間變化,于是四線圈電流之和下降至下限閾值的時間為

式(4)中的參數在仿真與實驗中是一致的,見表4,因此開路故障檢測時間。ilth取值18A是平衡開路故障誤判斷與故障檢測時間所得到的結果,如果增大ilth,故障檢測時間固然會減小,但這也增大了開路故障誤判斷的風險。
需要著重說明的是,開路故障后t2g的占空比取決于該時刻轉子x軸方向的位置誤差,在轉子穩定懸浮時,位置誤差幾乎為0,因此驅動信號t2g的占空比近似為0.5。而在實際實驗過程中,由于轉子的質心與旋轉中心不重合,導致位移信號中會存在較大的轉速頻率紋波,造成驅動信號t2g的占空比在0.5附近波動,故障檢測時間也會隨之發生改變。t2g占空比越高,說明V5(0100)電壓矢量作用的時間越長,共模電流ia1+ic1在一個開關周期內下降的時間越長,故障檢測時間相應地也就變短了。
3.3 容錯控制策略
利用四相全橋拓撲的正常/冗余模式以及開關元件的故障檢測來實現磁軸承開關元件的容錯控制,其結構框圖如圖7所示。
其基本工作原理為:位置環計算出參考電流信號(ixref,iyref)作為電流環的輸入信號,經過差分控制得到各線圈的參考電流,然后與實際電流相減后輸入PI電流控制器。由于四相全橋拓撲在冗余模式下線圈電流的方向與正常模式下相反,所以冗余模式下各線圈的參考電流需反向后再與實際電流相減。PI電流控制器會產生兩組PWM驅動信號,故障檢測模塊將在轉子穩定懸浮后實時檢測線圈電流之和來判斷是否需將正常模式切換至冗余模式。
3.4 仿真驗證
利用Matlab/Simulink搭建徑向四自由度磁軸承容錯控制系統,對2.2節開路故障后共模、差模電流下降/上升趨勢及3.3節的容錯切換進行仿真驗證。仿真參數采用實驗平臺參數,見表4。
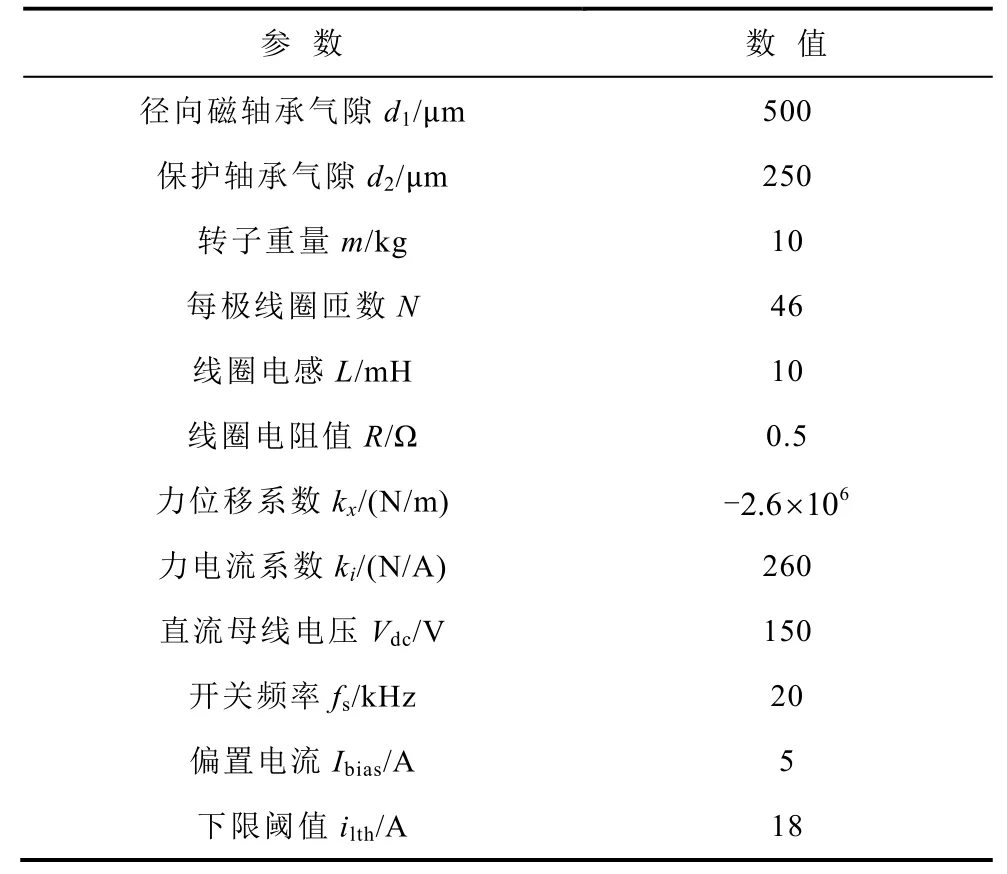
表4 實驗平臺參數 Tab.4 The parameters of test platform
3.4.1 開路故障仿真
St1開路故障驅動信號與共模、差模電流如圖9所示。在100ms時刻將第一橋臂上開關管St1驅動信號gt1置為0來模擬開路故障。可以看到在開路故障后的一小段時間內共模電流ia1+ic1與差模電流ia1?ic1不斷下降,且下降的時間與驅動信號gt2的占空比密切相關,當驅動信號gt2為高電平時,ia1+ic1與ia1?ic1同時下降,且ia1?ic1下降速度是ia1+ic1下降速度的兩倍,當驅動信號gt2為低電平時,ia1+ic1與ia1?ic1均處于續流狀態。隨后驅動信號gt2占空比慢慢趨于0,差模電流會緩慢上升趨于0,但共模電流會一直下降直至為0。反觀差模電流ia2?ic2,在開路故障發生后的一小段時間內一直處于續流狀態。假設四個線圈之和的下限閾值為18A,可以看到共模電流ia1+ic1下降至9A的時間約為270μs,因此故障檢測時間也約為270μs。

圖9 St1開路故障現象 Fig.9 The phenomenon of St1 open-circuit fault
圖10展示了第二橋臂上開關管St2開路故障后共模、差模電流變化趨勢,與St1開路故障后的現象相比,共模電流ia1+ic1與差模電流ia1?ic1變化趨勢基本無差別,但差模電流ia1?ic1是呈上升趨勢的。上述現象與2.2節的理論分析表現一致。
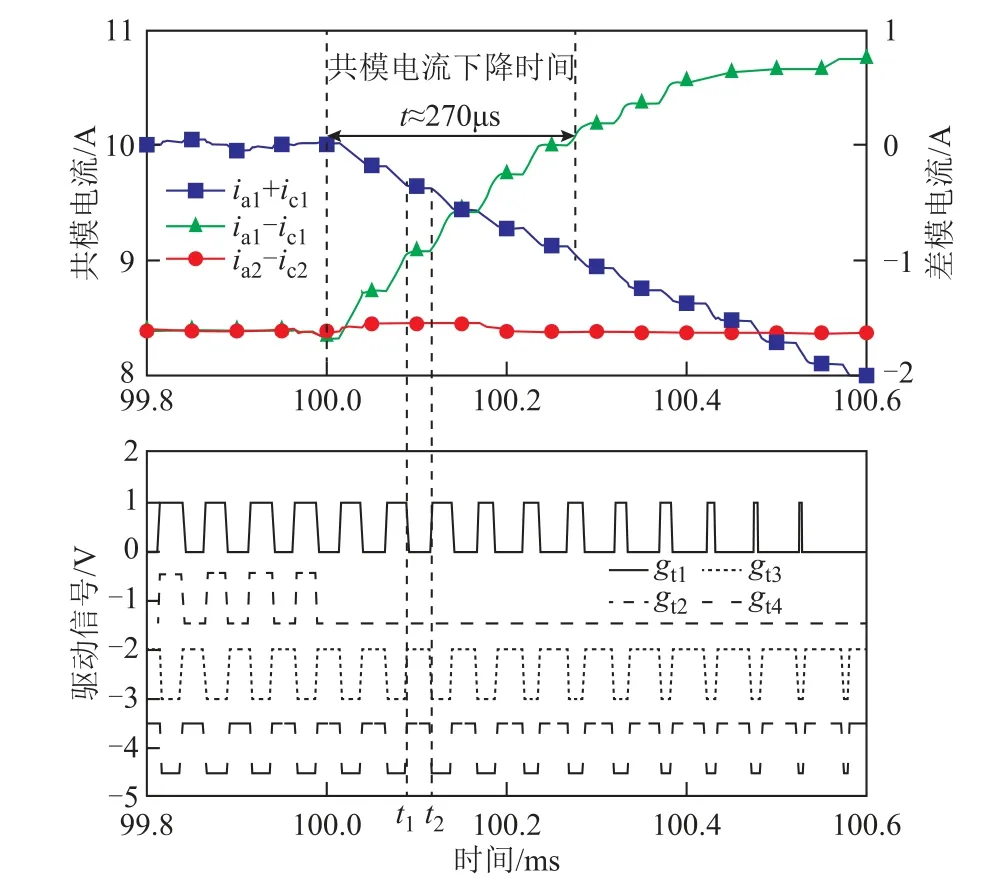
圖10 St2開路故障時電流及驅動信號波形 Fig.10 The phenomenon of St2 open-circuit fault
上述仿真結果表明,通過共模電流的下限閾值判斷是否有開路故障發生以及觀察差模電流變化趨勢判斷故障開關管位置這一策略是可行的。
3.4.2 容錯切換仿真
兩種模式切換過程如圖11所示。如圖11a所示,在0.1s時刻將第一橋臂上開關管St1驅動信號gt1置為0來模擬開路故障,共模電流ia1+ic1迅速下降。但由于加入了故障檢測模塊,其在t2時刻檢測到開路故障,此時四相全橋拓撲迅速從正常模式切換至冗余模式,開關管St1、St2、Sb3、Sb4被封鎖,Sb1、Sb2、St3、St4開始工作,共模電流繼續減小直至反向。圖11b顯示了切換過程中轉子位移的變化,可以看到整個暫態過程持續時間不超過40ms,轉子位置波動在150μm以內。暫態過程的轉子位置波動范圍與磁軸承的剛度以及轉子質量相關,因此實驗結果可能會因參數的變化與仿真有所差別。

圖11 兩種模式切換過程 Fig.11 The switching process between two modes
4 實驗驗證
為了進一步驗證四相全橋拓撲容錯的可行性,制作了一套應用在徑向四自由度磁軸承的四相全橋容錯控制器,實驗平臺和容錯控制器如圖12所示。
圖12a是徑向四自由度磁軸承實驗平臺,具體參數見表4。圖12b是容錯控制器,由功率板和控制板所組成。功率板上的兩個四相全橋拓撲分別控制對應的兩個徑向磁軸承。控制板上的主控芯片采用的是TMS320F28377,位置傳感器輸出信號經電平轉換電路輸入主控芯片,線圈電流采用霍爾電流傳感器進行采樣。
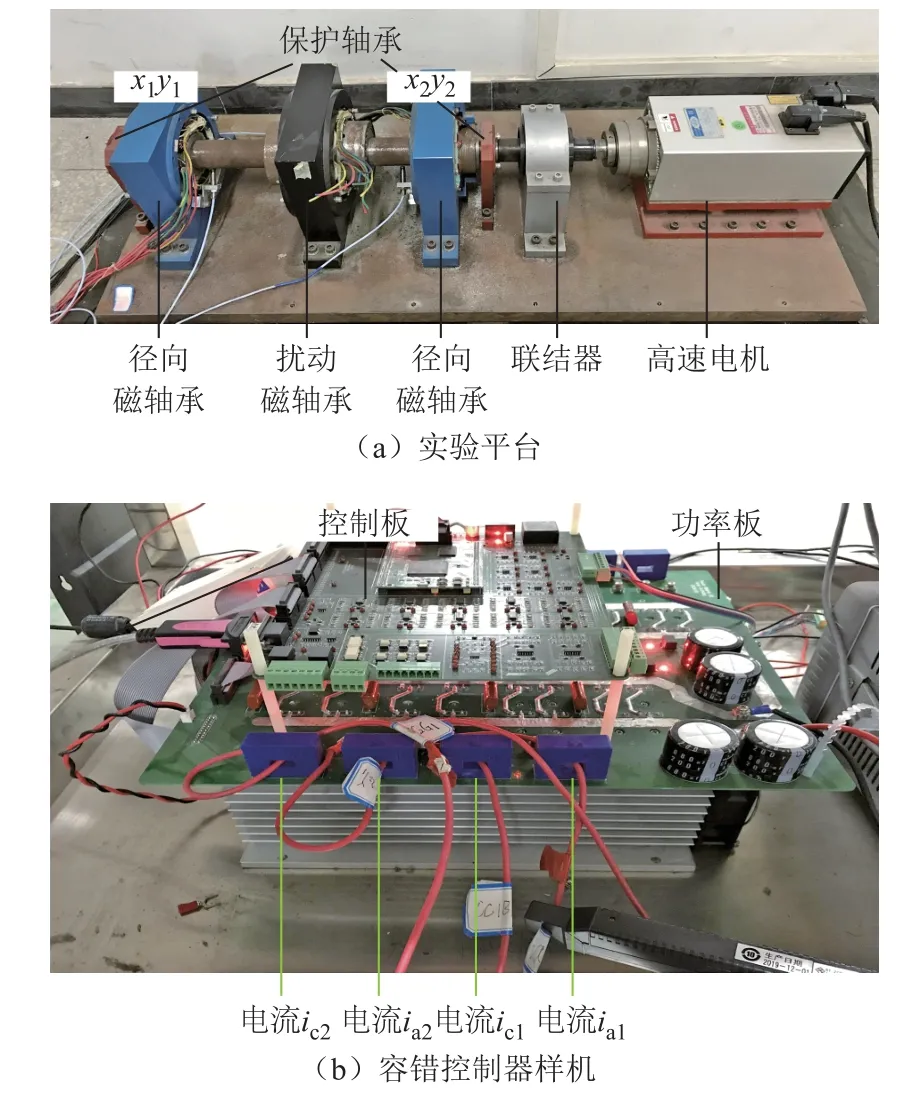
圖12 徑向四自由度磁軸承實驗平臺與容錯控制器 Fig.12 Four-axis AMB test rig and fault-tolerant controller for four-phase full-leg converter
4.1 四相四橋臂開關管開路故障
首先在該平臺上驗證四相四橋臂開關管發生開路故障后的現象,選用四相全橋拓撲的正常模式作為本實驗所需的四相四橋臂。四相四橋臂動態跌落實驗結果如圖13所示。在t1時刻將第一橋臂上開關管驅動信號 t1g置0模擬開路故障,由于四相四橋臂不存在冗余模式,所以在發生開路故障后,轉子迅速跌落至保護軸承。


圖13 四相四橋臂動態跌落實驗結果 Fig.13 Dynamic drop test results of four-phase full-leg
4.2 四相全橋靜態切換
在四相全橋拓撲的基礎上驗證磁軸承靜態懸浮時容錯切換。靜態容錯切換實驗結果如圖14所示。在t1時刻將第一橋臂上開關管驅動信號t1g置0模擬開路故障,共模電流ia1+ic1開始下降。大約400μs后,t2時刻故障檢測模塊檢測到開路故障的發生,四相全橋拓撲立即從正常模式切換至冗余模式,線圈電流繼續下降直至反向。整個切換暫態過程小于0.25s,轉子位移偏移量最大值不超過150μm。
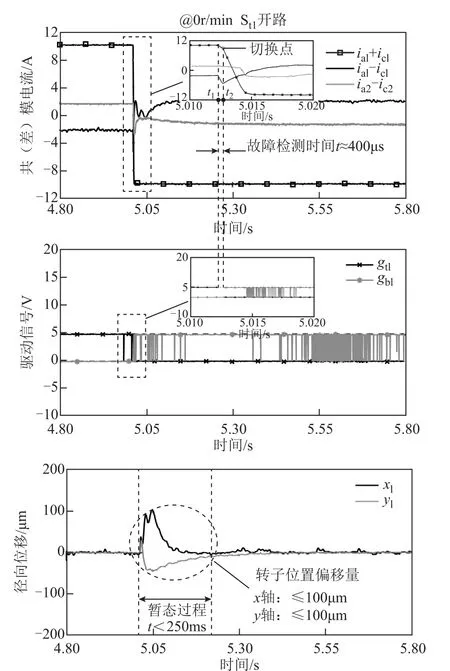
圖14 靜態容錯切換實驗結果 Fig.14 The experimental results of static switching process
4.3 四相全橋動態切換
在檢驗了磁軸承在懸浮的基礎上,由電機帶動磁軸承旋轉至不同轉速時的容錯性能,不同轉速下容錯切換的性能對比見表5。圖15為轉速達到3 000r/min時的容錯切換實驗結果。

表5 不同轉速下容錯切換的性能對比 Tab.5 Comparison of performance of fault-tolerant switching at different speeds

圖15 動態容錯切換實驗結果 Fig.15 The experimental results of dynamic switching process
分析表5可知,不同轉速下四相全橋拓撲的容錯性能差異很小,尤其是暫態過程中轉子位移波動范圍,不同轉速下差別很小,而故障檢測時間取決于開路故障時刻轉子的位置誤差,所以不同轉速下略微有所變化。
由圖15可知,在t1時刻將第一橋臂上開關管驅動信號gt1置0模擬開路故障,線圈電流ia1、ic1、ia2、ic2開始下降。大約350μs后,t2時刻故障檢測模塊檢測到開路故障的發生,四相全橋拓撲立即從正常模式切換至冗余模式,線圈電流繼續下降直至反向。整個切換過程小于250ms,轉子位移偏移量最大值不超過150μm,位移/電流波形出現的諧波成分主要是由旋轉過程中轉子偏心造成的。
4.4 故障定位
在磁軸承懸浮且轉速為1 800r/min的基礎上驗證不同開關管發生開路故障后差模電流變化趨勢的差異。
圖16與圖17分別展示了開關管St1、St2開路故障后的共模/差模電流的變化趨勢,可見在t1~t2時刻,二者的共模電流ia1+ic1與差模電流ia2?ic2是變化趨勢是相同的,而二者的差模電流ia1?ic1一個呈下降趨勢,另一個呈上升趨勢,因此可以通過差模電流的變化趨勢來判斷故障開關管的位置。

圖16 St1開路故障共模/差模電流變化趨勢 Fig.16 The trend of common mode/differential mode current after St1 open-circuit fault

圖17 St2開路故障共模/差模電流變化趨勢 Fig.17 The trend of common mode/differential mode current after St2 open-circuit fault
但需要強調的是,本文中所論述的故障定位對容錯方式并無影響,只是方便事后檢修,所以不需要實時檢測,可靠性要求也較低。
5 結論
磁懸浮軸承系統中,功率放大器的電力電子器件失效將導致懸浮失效和嚴重的后果。在此背景下,本文首先將四相四橋臂拓撲拓展為四相全橋拓撲。四相全橋拓撲可以分為兩個工作模式,這兩個模式產生完全相反的電流。但是因為主動式磁軸承基于磁阻力,該力的產生與電流方向無關,四相全橋的兩種工作模式對磁軸承的作用力和控制效果相同,因此可被用來作容錯控制。然后在電流差分控制基礎上給出了判斷開關器件開路故障的條件,并進行了故障檢測時間的理論計算。最后提出了相應的容錯控制策略使磁軸承以較小的位移波動為代價來達到兩種工作模式平滑切換這一目的。實驗結果也證明了該容錯控制策略在四相全橋拓撲上的可行性。尤其是,在轉子懸浮同時旋轉的過程中,該方法實現檢測和容錯切換過程不影響系統正常工作,是一種可實時的實現在線容錯的方法。
需另外說明的是,本文針對的雖然是開關管開路故障所實施的容錯控制策略,但同樣適用于門極驅動芯片損壞、驅動信號丟失等故障情況。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39