基于CBLA的無刷電機超前角控制系統研究
2022-05-17 07:56:28陳丁玲倪俊芳孫家圓
科技創新與應用 2022年13期
陳丁玲,倪俊芳,孫家圓
(蘇州大學 機電工程學院,江蘇 蘇州 215021)
BLDCM(Brushless Direct Current Motor)是以電子換向器取代了機械換向的直流無刷電機。其通常采用方波控制,通過切換U,V,W三相繞組中任意兩相通電來改變磁通量的方向,并運用三相全橋電路來改變電流的方向以及相電壓的大小,使電機旋轉[1-2]。該方波控制的方法,存在電機換相不平穩,轉矩波動較大,且相電流對于相電壓存在滯后而導致電機效率較低的問題。
國內研究者劉建林等[3],在基于方波控制前提下,研究了通過對傳感器進行在線矯正策略來確定最優超前角,改善了電機效率低的問題。施曉青、蔡駿等[4-5],研究了以相電流為反饋對換相誤差進行閉環校正,以及利用母線電壓做調速控制,減小了電機轉速不平穩的問題。國外Upama Das,Do-Hyeon Park等[6-7],分析了基于經典閉環控制下電機轉速和扭矩響應的變化,通過對霍爾錯位效應進行補償,減小了轉矩脈動。但是由于控制方式的限制,電機在持續帶載的狀態下,換相誤差的增大會導致電機輸出功率減小,調速范圍小的缺點。因此本文基于CBLA(Conduction band and lead angle),即每相導通帶和超前角控制,將采用PID和速度閉環控制,建立CBLA超前角控制系統,并進行Matlab仿真,同時將基于方波控制開發CBLA控制軟件,對該控制系統進行研究。
1 CBLA超前角控制原理
CBLA超前角控制核心是控制三相全橋電路的驅動方式,改變兩相繞組導通的方波控制方式,通過兩相和三相繞組交替導通控制,改變CB和LA的大小。
以極對數為2的無刷電機為例。方波控制中,每60°周期內進行U、V、W三相繞組兩兩換相,經六步換相使電機旋轉一圈,且每相導通帶為120°。CBLA超前角控制中,前(60°-LA)周期內導通兩相繞組,剩余LA周期內超前導通第三相繞組,此時三相繞組導通,每相導通帶為CB,同樣遵循六步換相原則。超前角LA和每相導通帶CB的關系可以表示:

其中,CB(°)為導通相帶,LA(°)為超前角度,p為轉子磁極對數。
以CBLA=135°/15°控制為例,當檢測到Hall abc為101時,在前45°周期內導通UH、WL兩相。剩余15°周期內(黑色區域),V相提前15°導通,MOSFET開通UH、WL、VH,三相繞組導通。如圖1所示。

圖1 CBLA超前角控制原理圖
以此類推,在每個60°周期內,有45°周期導通兩相繞組,15°周期導通三相,每相導通時長均為135°。
2 Matlab/Simulink建模與仿真
CBLA超前角控制系統的Matlab/Simulink仿真采用速度閉環PID控制[8],對三相全橋電路采用CBLA超前角控制,CBLA的計算是通過電機的轉速反饋來預估超前角的大小實現動態控制。
基于方波控制推導無刷直流電機的傳遞函數[9-10]。由BLDCM三相電壓平衡方程

式中:Ua、Ub、Uc為定子各相繞組電壓(V);Ia、Ib、Ic為定子各相繞組電流(A);Ea、Eb、Ec為定子各相繞組反電動勢(V);L為每相繞組的自感(H);M為每兩相繞組之間的互感(H);R為每相繞組的電阻(Ω)。
當功率管開通時,線電壓近似等于逆變橋直流側電壓,不考慮暫態過程,則A、B兩相穩態導通,兩相的反電動勢大小相等,方向相反,于是由線電壓方程可得:

其中,Ud是直流母線電壓,ra是繞組線電阻,ra=2R,La等效線電感,La=2(L-M),ke是反電動勢系數。
將電流用角速度表示:

其中,KT為電機轉矩系數,TL為負載轉矩,J為轉子轉動慣量,Bv為黏滯摩擦系數,Ω為電機角速度。
電壓和負載共同輸入下的速度響應:

基于六步換相,改變三相全橋電路的驅動方式,開發CBLA超前角控制軟件,如圖2所示。

圖2 CBLA軟件控制框圖
由速度響應傳遞函數、PID控制和CBLA超前角控制軟件構建基于CBLA的Matlab/Simulink仿真模型,如圖3所示。
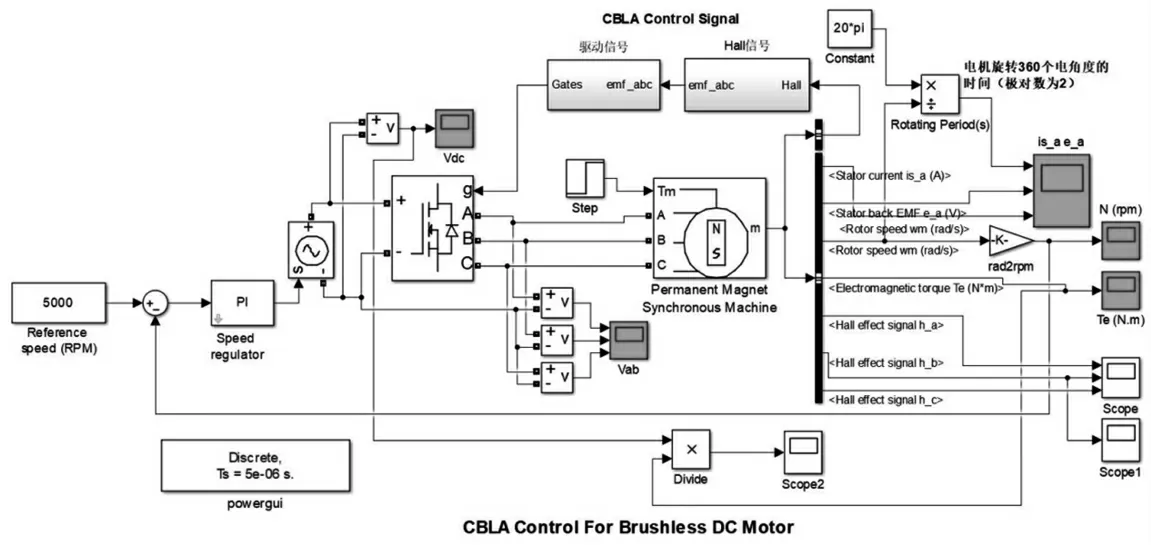
圖3 基于CBLA的Matlab/Simulink超前角控制系統仿真模型
仿真結果:給定電機轉速5 000 rpm,并在0.1 s處給3 N·m的負載。方波控制下,該電機最大轉速只能達到3 400 rpm,且帶載情況下速度只能維持在3 100 rpm。CBLA超前角控制,可以使電機的轉速達到預定的5 000 rpm,并在帶載狀態下,轉速能穩定在4 000 rpm,對比方波控制轉速提升了接近900 rpm。如圖4所示。

圖4 方波控制和CBLA控制下轉速仿真圖
3 對比實驗
對CBLA超前角控制系統在無刷直流電機轉速和輸出功率上的提升做驗證。利用降速法,模擬電機的持續帶載狀態,并對比方波控制和不同CBLA大小對轉速,扭矩以及輸出功率的影響。
實驗平臺搭建:2對極無刷直流電動工具圓鋸,直流電源,電子模塊,測功機和實驗臺架等,如圖5所示。

圖5 實驗平臺
實驗中共選取了方波控制以及3個不同CBLA來對比無刷直流電機的轉速、扭矩和輸出功率,實驗數據如圖6所示。
由圖6可得,電機最大輸出功率時刻時的轉速和扭矩大小,見表1。

表1 實驗對比結果參數表

圖6 不同CBLA下轉速、扭矩、輸出功率對比圖
結果表明,相較于方波控制,CBLA超前角控制在轉速和輸出功率上均有較大的提升,且CBLA=135°/15°時,轉速和功率提升最大,轉速提升約12.5%,輸出功率提升約10.5%。
4 結束語
本文基于無刷電機方波控制理論,研究了基于CBLA超前角控制系統,并進行Matlab仿真和結合電動工具圓鋸的實測對該控制系統進行驗證。該控制系統對比方波控制,速度最大提升了12.5%,輸出功率最高提升了10.5%。電機的帶載能力有較大地提升,滿足了實際應用要求。