雷達(dá)地面目標(biāo)識(shí)別技術(shù)現(xiàn)狀與展望
2022-05-18 22:52:05郭鵬程王晶晶楊龍順
航空兵器 2022年2期
郭鵬程 王晶晶 楊龍順


摘 要:????? 雷達(dá)地面目標(biāo)識(shí)別技術(shù)是空地導(dǎo)彈雷達(dá)導(dǎo)引頭智能化和信息化的重要技術(shù)支撐手段。近年來(lái),學(xué)者們對(duì)地面目標(biāo)識(shí)別技術(shù)做了大量研究,但是隨著現(xiàn)代化戰(zhàn)爭(zhēng)攻防對(duì)抗日益激烈,雷達(dá)地面目標(biāo)識(shí)別技術(shù)的應(yīng)用面臨著諸多問(wèn)題,成為長(zhǎng)期制約精確制導(dǎo)武器發(fā)展的瓶頸因素。為了更好地使相關(guān)雷達(dá)從業(yè)者了解該領(lǐng)域的研究現(xiàn)狀和未來(lái)的發(fā)展趨勢(shì),本文介紹了雷達(dá)目標(biāo)識(shí)別技術(shù)的概念,總結(jié)了面向裝備應(yīng)用雷達(dá)地面目標(biāo)識(shí)別存在的技術(shù)難點(diǎn),對(duì)國(guó)內(nèi)外研究現(xiàn)狀進(jìn)行了概括,最后對(duì)該技術(shù)的發(fā)展趨勢(shì)進(jìn)行了展望。
關(guān)鍵詞:???? 雷達(dá)地面目標(biāo)識(shí)別; 精確制導(dǎo); 噪聲穩(wěn)健; 雜波穩(wěn)健; 小樣本; 群目標(biāo); 空地導(dǎo)彈
中圖分類號(hào):???? TJ760; TN95
文獻(xiàn)標(biāo)識(shí)碼:??? A文章編號(hào):???? 1673-5048(2022)02-0001-12
DOI:10.12132/ISSN.1673-5048.2022.0012
1 雷達(dá)目標(biāo)識(shí)別技術(shù)介紹
現(xiàn)代化戰(zhàn)爭(zhēng)具有突發(fā)性、快速性、戰(zhàn)場(chǎng)環(huán)境復(fù)雜的特點(diǎn),對(duì)高技術(shù)型武器的信息化和智能化要求越來(lái)越高[1-3]。相比于激光、紅外等其他探測(cè)裝置,雷達(dá)不受環(huán)境狀況的約束,具有全天時(shí)、全天候和遠(yuǎn)距離探測(cè)目標(biāo)的能力,在導(dǎo)彈精確制導(dǎo)領(lǐng)域具有重要的應(yīng)用[4]。
雷達(dá)自動(dòng)目標(biāo)識(shí)別技術(shù)(Radar Automatic Target Recog-nition, RATR)是指利用雷達(dá)發(fā)射電磁波照射目標(biāo),對(duì)獲得的回波進(jìn)行分析以確定目標(biāo)的種類、型號(hào)屬性的技術(shù)[5-7]。典型的雷達(dá)目標(biāo)識(shí)別方法分為訓(xùn)練階段和工作階段,其工作流程如圖1所示。訓(xùn)練階段多在線下完成,主要包括數(shù)據(jù)獲取、預(yù)處理、特征提取和分類器訓(xùn)練步驟,其中,特征提取得到特征提取器的模型參數(shù),如在采用特征投影算法時(shí)的投影矩陣、在采用深度神經(jīng)網(wǎng)絡(luò)時(shí)的網(wǎng)絡(luò)參數(shù)等; 分類器訓(xùn)練步驟得到分類器模型參數(shù),如采用支持向量機(jī)(Support Vector Machine, SVM)分類器時(shí)的邊界向量參數(shù)等。工作階段在線上進(jìn)行,包括數(shù)據(jù)獲取、預(yù)處理、特征提取和分類決策步驟,最后輸出目標(biāo)的類別屬性。
按照對(duì)目標(biāo)區(qū)分的層次不同[5],RATR包括三個(gè)層次的含義: 目標(biāo)鑒別(Target Discrimination)、目標(biāo)分類(Target Classification)和目標(biāo)辨識(shí)(Target Identification),如圖2所示,這三個(gè)層次是逐層遞進(jìn)的。目標(biāo)鑒別即對(duì)檢測(cè)得到的多個(gè)目標(biāo)進(jìn)行真假目標(biāo)分辨,如待打擊目標(biāo)(如坦克、雷達(dá)車)和干擾(如角反射器)之間的區(qū)分,其所需處理的數(shù)據(jù)量較大,但計(jì)算復(fù)雜度較低。目標(biāo)分類即對(duì)目標(biāo)鑒別后得到的感興趣目標(biāo)進(jìn)行類別區(qū)分,如雷達(dá)車和坦克之間的區(qū)分,該階段所需處理的數(shù)據(jù)量小于目標(biāo)鑒別,但是計(jì)算復(fù)雜度較高。目標(biāo)辨識(shí)是在目標(biāo)分類的基礎(chǔ)上確認(rèn)同類目標(biāo)的具體型號(hào),該階段處理的數(shù)據(jù)量最少,但由于待區(qū)分目標(biāo)形狀接近,故識(shí)別模型最為復(fù)雜,計(jì)算復(fù)雜度最高。
RATR技術(shù)是導(dǎo)彈智能化、信息化的重要技術(shù)支撐手段,可有效提高我方戰(zhàn)斗力和戰(zhàn)場(chǎng)生存能力、減少作戰(zhàn)成本、提高作戰(zhàn)效率,因此,對(duì)RATR技術(shù)的研究具有重要的軍事應(yīng)用價(jià)值[9]。
2 彈載雷達(dá)地面目標(biāo)識(shí)別面臨的問(wèn)題
精確制導(dǎo)武器的核心部件是導(dǎo)引頭,導(dǎo)引頭通過(guò)感知復(fù)雜戰(zhàn)場(chǎng)環(huán)境,完成對(duì)感興趣目標(biāo)的探測(cè)、識(shí)別和跟蹤,最終引導(dǎo)導(dǎo)彈實(shí)現(xiàn)對(duì)目標(biāo)的精確打擊[10]。雷達(dá)導(dǎo)引頭,特別是毫米波雷達(dá)導(dǎo)引頭的工作頻率高,易在更小的體積和重量下實(shí)現(xiàn)更大帶寬,獲得更高的距離分辨率、速度分辨率和角分辨率,在空地導(dǎo)彈領(lǐng)域取得了廣泛應(yīng)用[4, 11]。隨著硬件水平和信號(hào)處理能力的不斷提升,空地導(dǎo)彈導(dǎo)引頭上搭載的雷達(dá)傳感器經(jīng)歷了從窄帶到寬帶、從單極化到多極化的發(fā)展歷程,從而使得雷達(dá)能夠收集到目標(biāo)更多的細(xì)節(jié)信息。與之相對(duì)應(yīng),學(xué)者們研究了基于單極化高分辨距離像(High Resolution Range Profile, HRRP)、單極化合成孔徑雷達(dá)(Synthetic Aperture Radar, SAR)圖像、多極化HRRP等的雷達(dá)地面目標(biāo)識(shí)別技術(shù),使得對(duì)地面目標(biāo)的識(shí)別能力逐步提升[12]。
相比于反艦和防空等導(dǎo)彈應(yīng)用,空地導(dǎo)彈雷達(dá)導(dǎo)引頭面臨更加復(fù)雜的地面環(huán)境,如圖3所示,其主要感興趣目標(biāo)為裝甲車輛、防空單元、運(yùn)兵車、導(dǎo)彈發(fā)射車等。一方面,感興趣目標(biāo)可能處于草地、沙漠、丘陵、雪地、公路、農(nóng)田等不同場(chǎng)景中,如圖4所示,這些場(chǎng)景反射特性不同,地雜波統(tǒng)計(jì)特性不同,不同的地面背景對(duì)目標(biāo)回波產(chǎn)生不同程度的調(diào)制,導(dǎo)致目標(biāo)回波特性退化甚至發(fā)生變化。另一方面,地面場(chǎng)景中可能存在各種干擾,如敵方釋放的有意電磁干擾、敵方布置的無(wú)源干擾(如角反射器、箔條)、自然干擾(如房屋、高壓塔、樹(shù)木、土丘)等,這些假目標(biāo)對(duì)感興趣目標(biāo)的探測(cè)形成干擾。因此,雷達(dá)地面目標(biāo)識(shí)別需具備對(duì)干擾的拒判能力和對(duì)感興趣目標(biāo)的辨別能力[13]。
在空地導(dǎo)彈雷達(dá)制導(dǎo)應(yīng)用背景下,雷達(dá)地面目標(biāo)識(shí)別面臨的主要困難來(lái)源于以下幾個(gè)方面:
(1) 感興趣目標(biāo)“慢且小”,導(dǎo)致回波信雜噪比低。
不同于海面艦船目標(biāo)和空中飛機(jī)目標(biāo),地面車輛目標(biāo)的雷達(dá)散射截面積(Radar Cross Section, RCS)較小,運(yùn)動(dòng)速度慢甚至靜止,部分目標(biāo)還配置掩護(hù)網(wǎng),目標(biāo)的RCS進(jìn)一步減小,回波幅度相對(duì)較小。通常情況下,雷達(dá)目標(biāo)識(shí)別訓(xùn)練階段的數(shù)據(jù)是在較高的信雜噪比環(huán)境下獲取的,因此,所用的訓(xùn)練數(shù)據(jù)質(zhì)量好,信雜噪比高。然而在實(shí)際應(yīng)用中,導(dǎo)彈由遠(yuǎn)及近接近目標(biāo),帶來(lái)兩個(gè)問(wèn)題: a. 當(dāng)雷達(dá)距離目標(biāo)較遠(yuǎn)時(shí),目標(biāo)回波相對(duì)較弱,導(dǎo)致信噪比較低; b. 當(dāng)雷達(dá)距離目標(biāo)較近時(shí),波束入射余角較大,地面散射系數(shù)較大,導(dǎo)致地雜波較強(qiáng),信雜比較低。信雜噪比較低的測(cè)試數(shù)據(jù)與訓(xùn)練數(shù)據(jù)失配,如果不對(duì)噪聲和雜波進(jìn)行處理,識(shí)別準(zhǔn)確度將受到極大的影響。因此,低信雜噪比下的目標(biāo)識(shí)別是地面目標(biāo)識(shí)別所面臨的問(wèn)題之一。
(2) 提前可獲得的目標(biāo)信息少,導(dǎo)致小樣本識(shí)別問(wèn)題。雷達(dá)目標(biāo)回波可認(rèn)為是目標(biāo)上散射點(diǎn)的相干疊加,而目標(biāo)不同方位的散射特性差異較大,其回波形狀隨著雷達(dá)觀測(cè)視角的變化而變化,這便是其姿態(tài)敏感性。因此,在進(jìn)行目標(biāo)識(shí)別時(shí),為了得到好的識(shí)別效果,訓(xùn)練樣本應(yīng)包含目標(biāo)全方位的雷達(dá)回波,以實(shí)現(xiàn)對(duì)目標(biāo)散射特性完備的表征。然而,對(duì)于雷達(dá)導(dǎo)引頭來(lái)說(shuō),可獲得的訓(xùn)練樣本有限,原因主要有: a. 目標(biāo)的非合作性。感興趣目標(biāo)多是敵方非合作目標(biāo),保密級(jí)別較高,我方難以獲取感興趣目標(biāo)全姿態(tài)的回波,而雷達(dá)導(dǎo)引頭需在有限樣本下對(duì)感興趣目標(biāo)正確分類。b. 戰(zhàn)場(chǎng)環(huán)境復(fù)雜多變。雷達(dá)波束照射范圍內(nèi)可能出現(xiàn)的干擾復(fù)雜多樣,如不同形狀的溝坎、房屋,敵方布置的有意干擾等。在線下階段無(wú)法收集干擾的所有姿態(tài)回波樣本,甚至缺乏很多類型的干擾回波樣本,而空地雷達(dá)導(dǎo)引頭需要在干擾樣本有限的情況下對(duì)干擾進(jìn)行正確拒判。有限樣本將會(huì)導(dǎo)致訓(xùn)練得到的分類器產(chǎn)生過(guò)擬合,對(duì)測(cè)試樣本的識(shí)別性能差。因此,小樣本目標(biāo)識(shí)別是雷達(dá)地面目標(biāo)識(shí)別的主要問(wèn)題之一。
(3) 目標(biāo)集群化出現(xiàn)的概率高,導(dǎo)致波束內(nèi)群目標(biāo)識(shí)別問(wèn)題。
地面感興趣目標(biāo)特別是裝甲類車輛,通常集群化出現(xiàn),且相互距離近,如圖5所示,集群目標(biāo)中的若干目標(biāo)不可避免地同時(shí)出現(xiàn)在雷達(dá)導(dǎo)引頭波束內(nèi)。當(dāng)波束內(nèi)的各個(gè)目標(biāo)徑向距離相近甚至相同,其回波會(huì)出現(xiàn)部分或完全重合的現(xiàn)象。此時(shí),若將多個(gè)目標(biāo)當(dāng)成單一目標(biāo)處理,則由于目標(biāo)距離像相對(duì)于訓(xùn)練模板發(fā)生較大變動(dòng)而錯(cuò)判,從而導(dǎo)致識(shí)別的概率嚴(yán)重降低[14-15]。
3 雷達(dá)地面目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
3.1 噪聲/雜波穩(wěn)健的地面目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
3.1.1 噪聲穩(wěn)健的目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
由于低信噪比條件下的目標(biāo)識(shí)別問(wèn)題是地面目標(biāo)、空中目標(biāo)和海上目標(biāo)雷達(dá)自動(dòng)識(shí)別的通用問(wèn)題,針對(duì)空中目標(biāo)和海上目標(biāo)的噪聲穩(wěn)健的RATR方法同樣可應(yīng)用于地面目標(biāo)識(shí)別中,因此,這里概括低信噪比條件下的RATR方法時(shí)不區(qū)分應(yīng)用場(chǎng)景。
目前,學(xué)者們對(duì)低信噪比環(huán)境下的雷達(dá)目標(biāo)識(shí)別技術(shù)進(jìn)行了大量研究,主要有三種解決途徑: 第一種是提取噪聲穩(wěn)健的特征; 第二種是在識(shí)別前進(jìn)行預(yù)處理,去除或減弱噪聲分量; 第三種是在測(cè)試階段根據(jù)噪聲水平自適應(yīng)更新分類器參數(shù)。
(1) 噪聲穩(wěn)健特征
噪聲穩(wěn)健的特征一直是學(xué)者們研究的重點(diǎn)內(nèi)容。雙譜特征很早就被證實(shí)是一種對(duì)噪聲穩(wěn)健的特征。由于加性高斯白噪聲雙譜為0,故學(xué)者們提出很多與雙譜有關(guān)的特征,如對(duì)數(shù)雙譜[16]、徑向積分雙譜[17]、軸向積分雙譜[18]、圓周積分雙譜[19]、按照Fisher準(zhǔn)則選定的雙譜元素特征[20]等,均對(duì)噪聲具有穩(wěn)健性。然而在實(shí)際應(yīng)用中,由于雙譜特征計(jì)算量大的特點(diǎn),其應(yīng)用范圍受到限制。
強(qiáng)散射中心幅度較大,同樣具有噪聲穩(wěn)健性,且其維度小,在運(yùn)算量、所需存儲(chǔ)空間和識(shí)別性能上均有明顯的優(yōu)勢(shì)。基于此,文獻(xiàn)[21]利用矩陣束法提取散射中心,定義了散射中心階數(shù)、相對(duì)位置和中心矩三個(gè)特征進(jìn)行識(shí)別,并利用外場(chǎng)實(shí)測(cè)數(shù)據(jù)驗(yàn)證了該方法的噪聲穩(wěn)健性。文獻(xiàn)[22]基于散射中心的稀疏分布特性,利用正交匹配追蹤(Orthogonal Matching Pursuit, OMP)算法提取了HRRP主散射中心幅度和位置信息作為特征,并利用Hausdorff距離實(shí)現(xiàn)散射中心集間的匹配,實(shí)測(cè)數(shù)據(jù)實(shí)驗(yàn)表明該算法的噪聲穩(wěn)健性優(yōu)于對(duì)比算法。然而,強(qiáng)散射中心的徑向位置屬性具有平移敏感性,在進(jìn)行提取時(shí)需進(jìn)行對(duì)齊處理。
深度神經(jīng)網(wǎng)絡(luò)能夠提取對(duì)目標(biāo)表征能力更強(qiáng)的特征,在近幾年里,學(xué)者們針對(duì)低信噪比下的雷達(dá)目標(biāo)識(shí)別問(wèn)題設(shè)計(jì)了若干適用的網(wǎng)絡(luò)模型。文獻(xiàn)[23]提出深度u型盲去噪網(wǎng)絡(luò)(Deep-u-Blind Denoising Network, DUBDNet)。文獻(xiàn)[24]提出梯度穩(wěn)定遞歸神經(jīng)網(wǎng)絡(luò)(Gradient Stabilized Recurrent Neural Network, GS-RNN)。文獻(xiàn)[25]基于卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks, CNN)結(jié)構(gòu)增強(qiáng)訓(xùn)練集、使用殘差塊并使用降噪自編碼增強(qiáng)網(wǎng)絡(luò)形成神經(jīng)網(wǎng)絡(luò)。文獻(xiàn)[26]針對(duì)全極化HRRP目標(biāo)識(shí)別提出聯(lián)合卷積長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)(Long Short-term Memory Networks, LSTM)和自注意力機(jī)制的網(wǎng)絡(luò)模型,均取得較好的噪聲穩(wěn)健性。在實(shí)際應(yīng)用中,神經(jīng)網(wǎng)絡(luò)的訓(xùn)練需要大量的訓(xùn)練樣本,否則容易出現(xiàn)過(guò)擬合問(wèn)題,這使得其應(yīng)用范圍受到限制。
另外,文獻(xiàn)[27-28]利用小波變換改善了噪聲環(huán)境下的識(shí)別性能。文獻(xiàn)[27]利用多貝西小波(Daubechies Wavelet)將原始HRRP分為多個(gè)子帶信號(hào),然后對(duì)每個(gè)子帶信號(hào)建立分類器,最后對(duì)多個(gè)子帶信號(hào)的分類器結(jié)果進(jìn)行融合得到目標(biāo)類別。文獻(xiàn)[28]通過(guò)實(shí)驗(yàn)發(fā)現(xiàn)大量的HRRP信號(hào)是不具備判別性的,而通過(guò)小波去噪預(yù)處理能夠有效去除非判別信息,從而顯著提高分類性能。
在全極化體制下,文獻(xiàn)[29]利用時(shí)間平均的方式對(duì)HRRP序列進(jìn)行H/α分解,并利用散射熵和極化角特征對(duì)目標(biāo)散射機(jī)制進(jìn)行分類,分析了雜波和噪聲對(duì)這兩個(gè)特征的影響以及分類性能。文獻(xiàn)[30]針對(duì)全極化HRRP目標(biāo)識(shí)別,利用Cameron分解投影方法提取目標(biāo)在三面角、二面角和1/4波長(zhǎng)器件這三個(gè)散射基上的投影,然后分別提出特征級(jí)融合簡(jiǎn)化核極限學(xué)習(xí)機(jī)(Reduced Kernel Extreme Learning Machine, RKELM)和決策級(jí)融合RKELM進(jìn)行融合分類,實(shí)驗(yàn)表明該方法在不同的訓(xùn)練樣本數(shù)下均獲得較高的噪聲穩(wěn)健性。
(2) 去除噪聲分量
利用噪聲和目標(biāo)信號(hào)特性的不同將噪聲和目標(biāo)回波進(jìn)行分離是解決低信噪比情況下目標(biāo)識(shí)別性能差的另一種方法。子空間投影特征利用一定的映射關(guān)系,將目標(biāo)回波或者其特征變換投影到信號(hào)子空間和噪聲子空間,然后去除噪聲子空間而只保留信號(hào)子空間達(dá)到去除噪聲的目的,典型的特征投影方法如主成分分析(Principal Components Analysis, PCA)[31]、線性判別分析(Linear Discriminant Analysis, LDA)[32]、奇異值分解(Singular Value Decomposition, SVD)[33]等,均在低信噪比條件下的雷達(dá)目標(biāo)識(shí)別中取得較好的效果。
對(duì)距離像進(jìn)行平均可將回波的信噪比提升N倍,能夠有效抑制回波中的散斑效應(yīng),抑制噪聲尖峰和幅度波動(dòng)特性的影響。基于此,文獻(xiàn)[5]分別使用平均距離像和散射點(diǎn)強(qiáng)度分布像進(jìn)行識(shí)別,發(fā)現(xiàn)兩種平均方法均具有噪聲穩(wěn)健性,而散射點(diǎn)強(qiáng)度分布像還有提高HRRP方位穩(wěn)定性的性能。文獻(xiàn)[34]構(gòu)建了堆棧聯(lián)合穩(wěn)健自編碼器,該模型利用平均距離像構(gòu)建穩(wěn)健約束,不僅使模型具有噪聲穩(wěn)健性,還松弛了HRRP的姿態(tài)敏感性。在實(shí)際應(yīng)用中,對(duì)距離像進(jìn)行平均的方法需要在不發(fā)生越距離單元走動(dòng)的角域內(nèi)收集多個(gè)HRRP樣本。
(3) 根據(jù)噪聲水平對(duì)分類器參數(shù)進(jìn)行調(diào)整
第三種改善低信噪比條件下目標(biāo)識(shí)別的方法是根據(jù)噪聲水平在測(cè)試階段對(duì)分類器的相應(yīng)參數(shù)進(jìn)行自適應(yīng)修正。典型方法的思路為: 以連續(xù)HRRP序列數(shù)據(jù)為基礎(chǔ),在訓(xùn)練階段根據(jù)HRRP各距離單元的分布特性進(jìn)行統(tǒng)計(jì)建模,常用的統(tǒng)計(jì)模型有自適應(yīng)高斯分類器(Adaptive Gaussian Classifier, AGC)[35]、Gamma Mixture模型[36-37]、Gamma-Gaussian Mixture模型[38]、因子分析(Factor Analysis, FA)模型[39-40]等,在識(shí)別階段首先估計(jì)測(cè)試樣本的噪聲水平,然后對(duì)相關(guān)模型參數(shù)進(jìn)行修正,最后使用Bayes分類器計(jì)算該樣本在各類別下的類后驗(yàn)概率大小確定其類別歸屬。這類方法需要大量的訓(xùn)練樣本估計(jì)模型參數(shù),且測(cè)試階段模型修正的計(jì)算量較大。
另一種思路是采用稀疏表示對(duì)信號(hào)進(jìn)行重構(gòu),從而去除噪聲分量。稀疏表示分類器在訓(xùn)練階段利用訓(xùn)練樣本構(gòu)建完備的字典,然后在分類階段尋找測(cè)試樣本在字典上的稀疏線性組合。文獻(xiàn)[41]提出一種能夠根據(jù)測(cè)試樣本環(huán)境噪聲自動(dòng)選擇稀疏分解系數(shù)的K-SVD算法,提高了噪聲背景下的目標(biāo)識(shí)別性能。文獻(xiàn)[42]在文獻(xiàn)[41]的基礎(chǔ)上,進(jìn)一步提出魯棒的字典學(xué)習(xí)算法,該方法克服了稀疏表示的不確定性,并對(duì)相鄰HRRP之間的幅度變化具有穩(wěn)健性。文獻(xiàn)[43]提出相干簡(jiǎn)化分段K-SVD,能夠在字典中原子數(shù)較少的情況下得到更高的識(shí)別概率,并提高實(shí)時(shí)性。文獻(xiàn)[44]聯(lián)合稀疏和低秩表示,同時(shí)對(duì)HRRP的局部特性和全局特性進(jìn)行描述,并對(duì)去噪聲字典進(jìn)行優(yōu)化,提高了低信噪比(Signal-to-Noise Ratio, SNR)條件下的識(shí)別性能。文獻(xiàn)[45]提出一種基于增強(qiáng)型稀疏自編碼器的HRRP去噪與重構(gòu)方法,能夠有效對(duì)信號(hào)進(jìn)行重構(gòu)并抑制噪聲,在低信噪比條件下識(shí)別效果較好。
3.1.2 雜波穩(wěn)健的目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
雜波影響下的雷達(dá)目標(biāo)識(shí)別通常比單純的噪聲背景下更加困難。通常雜波的強(qiáng)度與目標(biāo)信號(hào)強(qiáng)度相差不大,并且雜波譜與目標(biāo)非常相似,一般難以通過(guò)上述去噪手段去除,且其統(tǒng)計(jì)分布通常隨目標(biāo)所處背景而變化。目前,有關(guān)雜波穩(wěn)健的雷達(dá)目標(biāo)識(shí)別技術(shù)研究較少,研究思路主要為將雜波和目標(biāo)散射單元區(qū)分,然后對(duì)目標(biāo)散射單元進(jìn)行識(shí)別。文獻(xiàn)[46]利用目標(biāo)子空間和雜波子空間在時(shí)域和頻域特性的差異,將目標(biāo)所占支撐區(qū)截取,然后提取目標(biāo)特征進(jìn)行識(shí)別。文獻(xiàn)[47]提出一種基于兩次異常檢測(cè)的雷達(dá)地面目標(biāo)識(shí)別方法,該方法依據(jù)在方位像-徑向距離平面上雜波和目標(biāo)分布的不同,認(rèn)為雜波呈現(xiàn)單點(diǎn)和多點(diǎn)聚集狀,如圖6所示,將雜波散射單元視為異常點(diǎn),利用兩次異常檢測(cè)的方法區(qū)分雜波和目標(biāo)散射單元,最后利用實(shí)測(cè)地面車輛數(shù)據(jù)驗(yàn)證了其雜波穩(wěn)健性。文獻(xiàn)[48]提出點(diǎn)控玻爾茲曼機(jī)(Point-Wise Gated Boltzmann Machine, PGBM),該模型引入了選擇因子變量,能夠自動(dòng)選取回波中目標(biāo)的區(qū)域,從而只對(duì)目標(biāo)區(qū)域提取特征,實(shí)驗(yàn)驗(yàn)證PGBM提升了噪聲和雜波背景數(shù)據(jù)的識(shí)別性能。文獻(xiàn)[49]受PGBM啟發(fā),基于自動(dòng)編碼器框架,提出逐點(diǎn)鑒別自編碼器(Point-Wise Discriminative Autoencoder, PDAE),該模型引入了監(jiān)督信息的約束,使得目標(biāo)區(qū)域和雜波區(qū)域的區(qū)分更加精確。
3.2 小樣本目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
3.2.1 數(shù)據(jù)增廣
對(duì)訓(xùn)練樣本進(jìn)行數(shù)據(jù)增廣可以幫助識(shí)別系統(tǒng)更全面地建模規(guī)律,從而提高模型的識(shí)別能力、泛化能力和魯棒性。數(shù)據(jù)增廣方法可大致分為兩類。
第一類利用雷達(dá)回波產(chǎn)生原理仿真目標(biāo)回波,如文獻(xiàn)[13]提出一種基于混合模型的雷達(dá)非合作目標(biāo)HRRP仿真方法,該方法首先利用散射點(diǎn)模型模擬目標(biāo)的結(jié)構(gòu),然后利用高頻時(shí)域電磁散射計(jì)算方法和HRRP統(tǒng)計(jì)特性得到每個(gè)散射點(diǎn)的散射強(qiáng)度,最后對(duì)目標(biāo)各個(gè)姿態(tài)的HRRP進(jìn)行仿真。該方法具有較高的實(shí)時(shí)處理能力,但受人為主觀因素影響較強(qiáng)。文獻(xiàn)[50]利用電磁仿真軟件FEKO仿真目標(biāo)各個(gè)姿態(tài)的雷達(dá)回波,然而在實(shí)際應(yīng)用中目標(biāo)的精確3D模型無(wú)法獲知,且當(dāng)入射電磁波頻率較高時(shí)計(jì)算效率較低。
第二種類利用現(xiàn)有訓(xùn)練數(shù)據(jù)產(chǎn)生新的訓(xùn)練數(shù)據(jù),如添加白噪聲[51]、平移、翻轉(zhuǎn)、旋轉(zhuǎn)、Gamma對(duì)比度變化、log對(duì)比度變化[52]等操作,但是這種方式僅擴(kuò)充了樣本數(shù)據(jù)量,并沒(méi)有增加新的目標(biāo)信息,故性能提升有限。
隨著生成對(duì)抗網(wǎng)絡(luò)(Generative Adversarial Nets, GANs)的發(fā)展,其強(qiáng)大的樣本生成能力在解決小樣本雷達(dá)目標(biāo)識(shí)別上得到了應(yīng)用,基本結(jié)構(gòu)如圖7所示。GANs由生成器和判別器組成,生成器在輸入為隨機(jī)數(shù)據(jù)的情
況下,力求生成與真實(shí)數(shù)據(jù)分布相同的數(shù)據(jù),而判別器力求將真實(shí)數(shù)據(jù)和鑒別數(shù)據(jù)正確分類,通過(guò)生成器和判決器之間的對(duì)抗,最終使得生成器生成與真實(shí)數(shù)據(jù)分布一致的偽造數(shù)據(jù)。
文獻(xiàn)[53]利用GANs生成覆蓋全部角度的SAR圖像。文獻(xiàn)[54]對(duì)比了DualGAN和SimGAN(Simulated GAN)的樣本生成質(zhì)量,發(fā)現(xiàn)DualGAN容易產(chǎn)生偽像,其性能劣于SimGAN。文獻(xiàn)[55]聯(lián)合循環(huán)生成對(duì)抗網(wǎng)絡(luò)(Cycle-Consistent Adversarial Networks, CycleGAN)和孿生網(wǎng)絡(luò)組成SPGAN(Similarity Preserving Generative Adversarial Network),合成SAR圖像數(shù)據(jù),提高了識(shí)別性能。文獻(xiàn)[56]利用含多重鑒別器的MGAN(Mixture GANs)對(duì)訓(xùn)練數(shù)據(jù)增強(qiáng),提高了識(shí)別性能。文獻(xiàn)[57]仿真了在不同程度的知識(shí)缺失下,分別利用輔助分類器GAN(Auxi-liary Classifier GAN, ACGAN)和多模態(tài)無(wú)監(jiān)督圖像轉(zhuǎn)換模型(Multimodal Unsupervised Image-to-Image Translation, MUNIT)進(jìn)行HRRP數(shù)據(jù)增強(qiáng),發(fā)現(xiàn)MUNIT的性能優(yōu)于ACGAN,并得出結(jié)論: 在知識(shí)缺失程度較輕時(shí)進(jìn)行數(shù)據(jù)增強(qiáng)可提高目標(biāo)識(shí)別性能,而當(dāng)知識(shí)缺失程度嚴(yán)重時(shí),可學(xué)習(xí)的信息過(guò)少導(dǎo)致所學(xué)數(shù)據(jù)偏差較大,反而降低了目標(biāo)識(shí)別性能。文獻(xiàn)[58]提出一種角度旋轉(zhuǎn)生成網(wǎng)絡(luò)(Angular Rotation Generative Network, ARGN),在SAR圖像方位維回波不完備的情況下生成特定角度下的SAR圖像,改善目標(biāo)識(shí)別性能。該網(wǎng)絡(luò)利用遷移學(xué)習(xí)的思想,前提是源數(shù)據(jù)與目標(biāo)數(shù)據(jù)之間方位角的信息是共享的。首先,在源域?qū)W習(xí)一個(gè)潛在的特征空間,使得同一目標(biāo)在不同角度下的圖像特征可以相互映射; 然后,將該映射關(guān)系遷移到目標(biāo)任務(wù)中,由現(xiàn)有的目標(biāo)回波數(shù)據(jù)生成特定方位角下的目標(biāo)數(shù)據(jù); 最后,利用特征提取網(wǎng)絡(luò)得到目標(biāo)特征,輸入到SVM分類器中進(jìn)行分類。
總體來(lái)說(shuō),生成對(duì)抗網(wǎng)絡(luò)的出現(xiàn)為小樣本目標(biāo)識(shí)別的性能改善提供了思路,但正如文獻(xiàn)[57]所述,當(dāng)知識(shí)缺失程度嚴(yán)重時(shí),其反而對(duì)目標(biāo)識(shí)別性能產(chǎn)生負(fù)面影響。
3.2.2 模型優(yōu)化
模型優(yōu)化的思路大致可分為增加先驗(yàn)知識(shí)和降低分類模型的復(fù)雜度兩類。學(xué)者們有時(shí)只利用其中一種思路處理小樣本目標(biāo)識(shí)別問(wèn)題,有時(shí)也將兩種思路結(jié)合起來(lái)進(jìn)行處理。目前,解決小樣本目標(biāo)識(shí)別問(wèn)題的方法主要有以下幾種:
(1) 多任務(wù)學(xué)習(xí)(Multitask Learning)
多任務(wù)學(xué)習(xí)是指多個(gè)學(xué)習(xí)任務(wù)同時(shí)學(xué)習(xí),在學(xué)習(xí)過(guò)程中,通過(guò)共享模型結(jié)構(gòu)、參數(shù)等資源,提高模型的學(xué)習(xí)精度和泛化能力。目前,已經(jīng)發(fā)展了因子分析、稀疏表示、深度自編碼等模型的多任務(wù)學(xué)習(xí)模型緩解樣本有限時(shí)的目標(biāo)識(shí)別性能。文獻(xiàn)[39]和[59]分別提出多任務(wù)因子分析、多任務(wù)復(fù)數(shù)因子分析模型,在多類目標(biāo)幀概率密度函數(shù)的學(xué)習(xí)中,利用子任務(wù)之間的相關(guān)性共享參數(shù),減少了對(duì)訓(xùn)練樣本數(shù)的要求。文獻(xiàn)[41]利用字典學(xué)習(xí)共享樣本之間的內(nèi)在關(guān)聯(lián)信息,降低了識(shí)別方法對(duì)訓(xùn)練樣本數(shù)的需求。文獻(xiàn)[42]進(jìn)一步提出魯棒的字典學(xué)習(xí),該方法克服了稀疏表示的不確定性,并對(duì)相鄰HRRP 之間的幅度變化具有穩(wěn)健性。文獻(xiàn)[60]利用判別深度自編碼模型(DDAEs)對(duì)樣本進(jìn)行全局訓(xùn)練,提高了小樣本下的目標(biāo)識(shí)別性能。在實(shí)際應(yīng)用中,多任務(wù)學(xué)習(xí)方法仍需要每個(gè)方位幀包含幾十個(gè)樣本,對(duì)樣本數(shù)量的要求改善有限。
(2)? 遷移學(xué)習(xí)(Transfer Learning)
當(dāng)目標(biāo)任務(wù)訓(xùn)練數(shù)據(jù)缺乏時(shí),遷移學(xué)習(xí)將與目標(biāo)任務(wù)不同但相關(guān)的源任務(wù)上獲得的知識(shí)應(yīng)用到目標(biāo)任務(wù)上,源任務(wù)一般具有大量訓(xùn)練模型所需的資源以保證其學(xué)習(xí)到的知識(shí)有效。根據(jù)遷移內(nèi)容的不同,遷移學(xué)習(xí)可分為樣本遷移、特征遷移、模型遷移和關(guān)系遷移[61],其中,模型遷移在雷達(dá)目標(biāo)識(shí)別中應(yīng)用最為廣泛,其工作流程如圖8所示。首先,在源任務(wù)上,網(wǎng)絡(luò)利用源任務(wù)數(shù)據(jù)預(yù)訓(xùn)練好模型; 然后,將部分網(wǎng)絡(luò)結(jié)構(gòu)遷移到目標(biāo)網(wǎng)絡(luò)中,凍結(jié)網(wǎng)絡(luò)結(jié)構(gòu)和參數(shù); 最后,利用目標(biāo)任務(wù)數(shù)據(jù)微調(diào)目標(biāo)任務(wù)網(wǎng)絡(luò)的其他參數(shù),完成目標(biāo)網(wǎng)絡(luò)的模型訓(xùn)練。目標(biāo)任務(wù)通過(guò)將在源任務(wù)模型中預(yù)訓(xùn)練的網(wǎng)絡(luò)模型和權(quán)重作為先驗(yàn)知識(shí),即使只有少量的數(shù)據(jù),也可能取得好的性能。
文獻(xiàn)[62]將無(wú)標(biāo)簽的SAR場(chǎng)景數(shù)據(jù)訓(xùn)練好的網(wǎng)絡(luò)模型遷移到SAR人造目標(biāo)識(shí)別任務(wù)上,取得了好的識(shí)別效果。文獻(xiàn)[63]在模擬數(shù)據(jù)集上預(yù)訓(xùn)練網(wǎng)絡(luò)模型,然后將其遷移到目標(biāo)數(shù)據(jù)集上,其識(shí)別性能優(yōu)于只利用目標(biāo)數(shù)據(jù)集進(jìn)行訓(xùn)練的性能。文獻(xiàn)[64]利用自動(dòng)識(shí)別系統(tǒng)(Automatic Identification System, AIS)收集到的有標(biāo)簽艦船數(shù)據(jù)作為源數(shù)據(jù)訓(xùn)練初始的SVM分類器,然后在目標(biāo)數(shù)據(jù)集上進(jìn)一步更新SVM參數(shù)。實(shí)驗(yàn)證明,在訓(xùn)練樣本不足的情況下,通過(guò)AIS數(shù)據(jù)知識(shí)的傳遞,SVM分類器性能得到明顯提升。文獻(xiàn)[65]針對(duì)SAR目標(biāo)識(shí)別中樣本量少、存儲(chǔ)量大和計(jì)算時(shí)間長(zhǎng)的問(wèn)題,首先利用ImageNet數(shù)據(jù)集訓(xùn)練卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks, CNN),然后遷移到MSTAR數(shù)據(jù)集并進(jìn)行網(wǎng)絡(luò)參數(shù)微調(diào),最后采用濾波器剪枝方法得到一個(gè)緊湊的網(wǎng)絡(luò)。該方法將網(wǎng)絡(luò)速度提升了3.6倍,網(wǎng)絡(luò)參數(shù)壓縮了3.7倍,但識(shí)別率只降低了1.42%。文獻(xiàn)[66]針對(duì)SAR目標(biāo)識(shí)別中遷移學(xué)習(xí)的三個(gè)問(wèn)題展開(kāi)探討: a. 哪些網(wǎng)絡(luò)和源任務(wù)更適合遷移到SAR圖像目標(biāo)識(shí)別中; b. 哪些特征層在SAR目標(biāo)識(shí)別中遷移更具有普適性; c. 如何有效地遷移到SAR目標(biāo)識(shí)別。該文得出以下幾個(gè)結(jié)論: a. 網(wǎng)絡(luò)的可遷移性由網(wǎng)絡(luò)的泛化能力和源任務(wù)與目標(biāo)任務(wù)之間的距離決定,具有無(wú)標(biāo)簽的大量SAR圖像數(shù)據(jù)比光學(xué)圖像數(shù)據(jù)更適合遷移到SAR目標(biāo)識(shí)別任務(wù)中; b. 深度網(wǎng)絡(luò)提取的特征可分為通用特征和特定特征,特定特征與任務(wù)密切相關(guān),而通用特征可遷移到其他相似的任務(wù)上; c. 所提出得基于多核最大均值差異(Multikernel Maximum Mean Discrepancy, MK-MMD)的域自適應(yīng)方法,增加了遷移網(wǎng)絡(luò)提取的特征在目標(biāo)域的適應(yīng)性。文獻(xiàn)[67]將基于屬性散射中心模型的電磁散射機(jī)理遷移到復(fù)數(shù)卷積神經(jīng)網(wǎng)絡(luò)中,對(duì)第一個(gè)卷積層進(jìn)行調(diào)制,提高了目標(biāo)識(shí)別性能。文獻(xiàn)[68]將地面目標(biāo)的HRRP數(shù)據(jù)作為源數(shù)據(jù),將飛機(jī)目標(biāo)作為目標(biāo)數(shù)據(jù),在利用遷移學(xué)習(xí)的基礎(chǔ)上,通過(guò)引入深度域自適應(yīng)網(wǎng)絡(luò)考慮了源數(shù)據(jù)的類內(nèi)一致性,提高了飛機(jī)目標(biāo)的識(shí)別性能,并松弛了HRRP的姿態(tài)敏感性。
(3) 度量學(xué)習(xí)(Metric Learning)
度量學(xué)習(xí)旨在學(xué)習(xí)一個(gè)恰當(dāng)?shù)木嚯x度量函數(shù),以有效描述樣本之間的相似性。好的度量方式能夠使得同類樣本之間的距離較小,而異類樣本之間的距離較大。孿生網(wǎng)絡(luò)(Siamese Neural Networks)和原型網(wǎng)絡(luò)(Prototypical Network)是兩種常用于解決小樣本雷達(dá)目標(biāo)識(shí)別問(wèn)題的模型。孿生網(wǎng)絡(luò)的結(jié)構(gòu)如圖9所示,由一對(duì)參數(shù)共享的雙胞胎網(wǎng)絡(luò)組成,分別接收不同的輸入樣本并在末端匯入能量函數(shù),以計(jì)算輸出特征的相似度。
原型網(wǎng)絡(luò)假設(shè)在特征空間中每類樣本均存在一個(gè)原型表示,各類樣本特征均在原型向量周圍。在訓(xùn)練階段,學(xué)習(xí)樣本的非線性映射,并將特征空間中該類特征的平均值作為原型向量; 在分類階段,尋找與待分類樣本的映射特征距離最近的原型向量類別作為其類別屬性。
度量學(xué)習(xí)在小樣本雷達(dá)目標(biāo)識(shí)別中得到了應(yīng)用。文獻(xiàn)[69]利用孿生網(wǎng)絡(luò)對(duì)不完備訓(xùn)練樣本集下的SAR目標(biāo)圖像進(jìn)行識(shí)別,證明了其識(shí)別性能優(yōu)于對(duì)比算法。文獻(xiàn)[70]設(shè)計(jì)了改進(jìn)的孿生網(wǎng)絡(luò),同時(shí)具有分類器和相似鑒別器,該模型不僅提高了分類精度,還降低了GPU內(nèi)存消耗,提高了分類速度。文獻(xiàn)[71]聯(lián)合CNN和度量學(xué)習(xí),首先對(duì)CNN網(wǎng)絡(luò)進(jìn)行訓(xùn)練,然后將其特征提取網(wǎng)絡(luò)嵌入到原型網(wǎng)絡(luò)中,提高了小樣本情況下地面目標(biāo)識(shí)別性能。文獻(xiàn)[72]提出混合孿生網(wǎng)絡(luò),首先對(duì)SAR圖像進(jìn)行預(yù)處理,得到3個(gè)通道的SAR圖像數(shù)據(jù),然后利用三元組損失函數(shù)對(duì)混合孿生網(wǎng)絡(luò)進(jìn)行訓(xùn)練,最后將三路輸出特征進(jìn)行融合,在少樣本情況下取得了優(yōu)于對(duì)比算法的識(shí)別性能。
(4)? 元學(xué)習(xí)(Meta Learning)
不同于遷移學(xué)習(xí)提高模型在數(shù)據(jù)上的泛化能力,元學(xué)習(xí)旨在提高模型在多任務(wù)上的泛化能力。元學(xué)習(xí)的核心思想是“學(xué)會(huì)如何學(xué)習(xí)”,其模型通過(guò)學(xué)習(xí)多個(gè)任務(wù)的識(shí)別過(guò)程積累經(jīng)驗(yàn),從而在全新的目標(biāo)任務(wù)上只需要少量樣本便可實(shí)現(xiàn)快速學(xué)習(xí),即元學(xué)習(xí)培養(yǎng)模型的自主學(xué)習(xí)能力。
元學(xué)習(xí)的學(xué)習(xí)過(guò)程分為元訓(xùn)練階段和元測(cè)試階段。數(shù)據(jù)集分為源任務(wù)數(shù)據(jù)集和目標(biāo)任務(wù)數(shù)據(jù)集,通常源任務(wù)數(shù)據(jù)集用于元訓(xùn)練階段,目標(biāo)任務(wù)數(shù)據(jù)集用于元測(cè)試階段。假設(shè)目標(biāo)任務(wù)為對(duì)C類目標(biāo)進(jìn)行分類,每個(gè)類別中包含K個(gè)有標(biāo)簽樣本,則該學(xué)習(xí)問(wèn)題稱為C-way K-shot; 源任務(wù)數(shù)據(jù)集包含R類目標(biāo),每類P個(gè)樣本。在元訓(xùn)練階段,首先,從源任務(wù)數(shù)據(jù)集中隨機(jī)抽取C類目標(biāo),每類K個(gè)樣本組成一個(gè)元任務(wù)數(shù)據(jù)集; 然后,從元任務(wù)數(shù)據(jù)集中每類的K個(gè)樣本中隨機(jī)抽取S個(gè)樣本作為采樣集,剩下的每類K-S個(gè)樣本作為查詢集Q; 接著,模型學(xué)習(xí)采樣集樣本后,對(duì)查詢集樣本進(jìn)行預(yù)測(cè),通過(guò)查詢集樣本的損失函數(shù)實(shí)現(xiàn)模型的訓(xùn)練。模型通過(guò)對(duì)源任務(wù)數(shù)據(jù)集的多次隨機(jī)采樣構(gòu)建多個(gè)元任務(wù)進(jìn)行學(xué)習(xí)訓(xùn)練,得到預(yù)訓(xùn)練后的網(wǎng)絡(luò)模型。在元測(cè)試階段,源任務(wù)數(shù)據(jù)集同樣分為支撐集和測(cè)試集,已訓(xùn)練完成的網(wǎng)絡(luò)首先在支撐集上完成學(xué)習(xí),然后對(duì)測(cè)試集進(jìn)行識(shí)別。
目前,元學(xué)習(xí)主要有三類方法: 基于度量的元學(xué)習(xí)、基于模型的元學(xué)習(xí)和基于優(yōu)化的元學(xué)習(xí)。基于度量的元學(xué)習(xí)網(wǎng)絡(luò)希望模型學(xué)會(huì)比較,并根據(jù)相似性對(duì)樣本進(jìn)行分類,其網(wǎng)絡(luò)結(jié)構(gòu)如圖10所示。模型對(duì)查詢集/測(cè)試集進(jìn)行映射,并在映射空間比較特征向量和各類采樣集/支撐集特征向量的相似性,最后進(jìn)行分類。基于模型的元學(xué)習(xí)旨在生成一個(gè)能夠設(shè)計(jì)模型的模型,網(wǎng)絡(luò)模型靈活,可學(xué)習(xí)空間大。基于優(yōu)化的元學(xué)習(xí)旨在學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)的優(yōu)化方式,此類方法不依賴于模型,但在訓(xùn)練過(guò)程中超參數(shù)搜索較為復(fù)雜。
元學(xué)習(xí)在解決小樣本雷達(dá)目標(biāo)識(shí)別問(wèn)題取得了成功應(yīng)用。針對(duì)基于HRRP的目標(biāo)識(shí)別方面,文獻(xiàn)[73]針對(duì)多極化HRRP小樣本目標(biāo)識(shí)別,采用了基于LSTM的元學(xué)習(xí)模型,并將HH極化方式下的回波作為元訓(xùn)練任務(wù)數(shù)據(jù)集,將HV極化方式下的回波作為元測(cè)試任務(wù)數(shù)據(jù)集,實(shí)驗(yàn)證明,該文采用的方法優(yōu)于現(xiàn)有方法。文獻(xiàn)[74]針對(duì)方位不完備下的HRRP識(shí)別問(wèn)題,提出基于域感知能力的元神經(jīng)網(wǎng)絡(luò)(Domain-Aware Meta Network, DOAMN),其由域感知模塊和基于模型的元神經(jīng)網(wǎng)絡(luò)模塊兩部分組成,域感知模塊區(qū)分測(cè)試樣本是否為訓(xùn)練樣本已知的方位,若是,則將其送入庫(kù)內(nèi)樣本分類; 若不是,則將其送入元網(wǎng)絡(luò),利用元學(xué)習(xí)進(jìn)行識(shí)別。
針對(duì)SAR小樣本目標(biāo)識(shí)別問(wèn)題,文獻(xiàn)[75]提出一種概率元學(xué)習(xí)模型解決SAR目標(biāo)識(shí)別中的小樣本問(wèn)題。該模型首先利用仿真數(shù)據(jù)學(xué)習(xí)模型的全局參數(shù),然后利用實(shí)測(cè)數(shù)據(jù)組成新的任務(wù),并利用攤銷推理建立特定任務(wù)參數(shù)的后驗(yàn)概率模型,最后構(gòu)建預(yù)測(cè)分布模型得到樣本的類別置信度。該文利用實(shí)測(cè)數(shù)據(jù)驗(yàn)證了概率元學(xué)習(xí)模型在解決小樣本問(wèn)題上的優(yōu)越性。文獻(xiàn)[76]提出屬性導(dǎo)向多尺度原型網(wǎng)絡(luò)(Attribute-Guided Multi-Scale Prototypical Network, AG-MsPN),解決SAR目標(biāo)識(shí)別中的小樣本問(wèn)題。該方法考慮到SAR圖像的復(fù)數(shù)特性,首先,利用子帶分解得到更完整的目標(biāo)描述; 然后,考慮到不同卷積層輸出特征的互補(bǔ)性,提出一種多尺度原型網(wǎng)絡(luò),提高了特征可分性,緩解了SAR目標(biāo)圖像的類內(nèi)多樣性和類間相似性高的問(wèn)題; 最后,為了緩解源域數(shù)據(jù)較少時(shí)域性能差的問(wèn)題,設(shè)計(jì)了SAR目標(biāo)的先驗(yàn)二值屬性,并在多尺度原型網(wǎng)絡(luò)中添加了額外的屬性分類模塊,將圖像映射到屬性空間進(jìn)行分類。該文利用MSTAR數(shù)據(jù)證明了所提AG-MsPN在3-way 5-shot,10-shot和20-shot情況下均優(yōu)于對(duì)比算法,可顯著提高小樣本下的目標(biāo)識(shí)別性能。文獻(xiàn)[77]提出適用于小樣本SAR目標(biāo)識(shí)別的卷積-雙向長(zhǎng)短時(shí)原型網(wǎng)絡(luò)(Conv-Bi LSTM Prototypical Network, CBLPN)。該網(wǎng)絡(luò)分為兩個(gè)階段: 第一階段為嵌入網(wǎng)絡(luò)訓(xùn)練,將SAR圖像從原始空間映射到可分性更高的嵌入空間; 第二階段利用歐幾里德距離對(duì)嵌入空間樣本特征進(jìn)行分類。文獻(xiàn)[78]針對(duì)實(shí)際應(yīng)用中的不同情況,結(jié)合遷移學(xué)習(xí)和元學(xué)習(xí)提出一套綜合解決方案: 當(dāng)源任務(wù)信息量缺乏或源任務(wù)與目標(biāo)任務(wù)之間的差異較大時(shí),利用遷移學(xué)習(xí)進(jìn)行識(shí)別; 相反,采用元學(xué)習(xí)進(jìn)行識(shí)別。該方案能夠最大程度地發(fā)揮不同模型的優(yōu)勢(shì),從而提高小樣本目標(biāo)識(shí)別的性能和效率。文獻(xiàn)[79]基于元學(xué)習(xí)框架,在學(xué)習(xí)到多個(gè)相關(guān)任務(wù)的泛化性能后,引入遷移學(xué)習(xí),對(duì)目標(biāo)任務(wù)網(wǎng)絡(luò)進(jìn)行微調(diào),提高了小樣本下的識(shí)別性能。該文還得出以下對(duì)工程實(shí)踐具有一定的指導(dǎo)意義的結(jié)論: a. 當(dāng)源任務(wù)數(shù)據(jù)集與目標(biāo)任務(wù)數(shù)據(jù)集之間的類別相關(guān)度較大時(shí),元學(xué)習(xí)更優(yōu); 而當(dāng)類別相關(guān)度較小時(shí),遷移學(xué)習(xí)更優(yōu); b. 元學(xué)習(xí)適應(yīng)于目標(biāo)任務(wù)數(shù)據(jù)集包含的樣本數(shù)極少的情況,而當(dāng)目標(biāo)樣本數(shù)增多時(shí),遷移學(xué)習(xí)性能更佳; c. 當(dāng)源任務(wù)數(shù)據(jù)集中包含足夠多的目標(biāo)類別時(shí),元學(xué)習(xí)才能達(dá)到好的泛化性能。
在元學(xué)習(xí)中,源任務(wù)數(shù)據(jù)集需包含足夠的元任務(wù),且包含多類樣本。當(dāng)源域任務(wù)缺乏時(shí),元學(xué)習(xí)易產(chǎn)生過(guò)擬合問(wèn)題。基于此,文獻(xiàn)[80]關(guān)注于源域中少任務(wù)時(shí)的元學(xué)習(xí)問(wèn)題,提出MSAR模型。該模型首先利用源域訓(xùn)練數(shù)據(jù)訓(xùn)練4CONV網(wǎng)絡(luò),獲得先驗(yàn)知識(shí),然后采用3種遷移學(xué)習(xí)方法將此網(wǎng)絡(luò)遷移到元學(xué)習(xí)模型中,并采用困難任務(wù)挖掘機(jī)制使得模型更加關(guān)注困難任務(wù),提高模型訓(xùn)練的有效性。
(5) 在線學(xué)習(xí)(Online Learning)
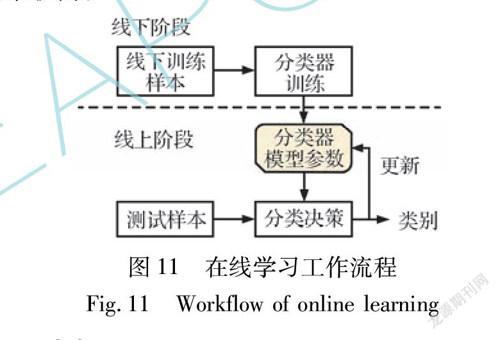
在線學(xué)習(xí)利用分類器在工作過(guò)程中收集到的樣本在線更新分類器模型,使得分類器能夠?qū)崟r(shí)學(xué)習(xí)新樣本中蘊(yùn)含的有用信息,從而促進(jìn)將來(lái)的學(xué)習(xí)和分類過(guò)程,在線學(xué)習(xí)的工作流程如圖11所示。在線下階段,收集的訓(xùn)練樣本被用來(lái)對(duì)分類器進(jìn)行訓(xùn)練,得到初始分類器模型參數(shù); 在線上階段,測(cè)試樣本首先經(jīng)過(guò)當(dāng)前的分類器模型預(yù)測(cè)標(biāo)簽,然后將其作為新的訓(xùn)練樣本對(duì)分類器的模型參數(shù)進(jìn)行更新。由于在線學(xué)習(xí)方法需要在線對(duì)分類器進(jìn)行更新,故在實(shí)際應(yīng)用中,其實(shí)時(shí)性較差,對(duì)硬件水平的要求較高。
Yver[81]提出四種在線學(xué)習(xí)方法,包括在線自訓(xùn)練(self-training)標(biāo)簽傳播(Label Propagation, LP)算法,自訓(xùn)練LASVM,LP和LASVM的結(jié)合,在線直推式支持向量機(jī)算法。自訓(xùn)練方法首先利用線下樣本訓(xùn)練教師分類器,然后利用教師分類器生成無(wú)標(biāo)簽樣本的偽標(biāo)簽,最后利用這些具有偽標(biāo)簽的樣本更新分類器。這種更新方法無(wú)法降低由有限樣本造成的偏差。LASVM方法在更新過(guò)程中得到分類器模型的近似解,其只能采用逐個(gè)更新的模式,而無(wú)法逐塊更新,因此,在實(shí)際應(yīng)用中計(jì)算耗時(shí)。文獻(xiàn)[82]提出一種基于SAR圖像的CNN更新方法。該方法利用線下樣本訓(xùn)練CNN,然后利用SVM得到線上樣本的偽標(biāo)簽,并用來(lái)更新網(wǎng)絡(luò)參數(shù)。這種更新方法在MSTAR數(shù)據(jù)集上表現(xiàn)出令人滿意的識(shí)別性能,然而,其必須存儲(chǔ)所有的線上樣本,對(duì)系統(tǒng)的存儲(chǔ)資源造成負(fù)擔(dān)。文獻(xiàn)[83]采用在線學(xué)習(xí)的方法,在線下階段,由簡(jiǎn)化核極限學(xué)習(xí)機(jī)RKELM算法利用線下得到的樣本訓(xùn)練單隱層前饋神經(jīng)網(wǎng)絡(luò)的初始網(wǎng)絡(luò)參數(shù); 在線上分類階段,迭代地進(jìn)行偽標(biāo)簽標(biāo)記和網(wǎng)絡(luò)參數(shù)更新兩個(gè)步驟: 一旦收集到一定數(shù)量的測(cè)試樣本便利用輔助分類器標(biāo)記偽標(biāo)簽,然后將偽標(biāo)簽置信度較高的測(cè)試樣本當(dāng)作額外的訓(xùn)練樣本,利用在線序列RKELM算法對(duì)網(wǎng)絡(luò)進(jìn)行更新。實(shí)驗(yàn)證明,隨著識(shí)別階段更新過(guò)程的進(jìn)行,目標(biāo)識(shí)別性能逐漸提升,如圖12所示,其識(shí)別率最高可提升6%。
(6) 干擾拒判
在實(shí)際應(yīng)用中,干擾樣本無(wú)法完備收集,為了剔除干擾的影響并正確識(shí)別感興趣目標(biāo),學(xué)者們主要發(fā)展了兩種解決思路: 第一種采用單類分類器進(jìn)行識(shí)別; 第二種采用開(kāi)集識(shí)別方法。
在單類分類器方面,文獻(xiàn)[84]針對(duì)地面目標(biāo)HRRP的庫(kù)外目標(biāo)鑒別問(wèn)題,提出一種基于訓(xùn)練特征空間分布的雷達(dá)地面目標(biāo)鑒別器。該文考慮到HRRP不同姿態(tài)下特征空間非均勻聚合的特點(diǎn),對(duì)訓(xùn)練樣本特征空間進(jìn)行區(qū)域劃分,然后對(duì)每個(gè)區(qū)域進(jìn)行支持向量域描述。實(shí)驗(yàn)證明,該方法可提高對(duì)地面感興趣目標(biāo)的鑒別性能和對(duì)干擾的拒判性能。文獻(xiàn)[85]針對(duì)單類分類器一類支持向量機(jī)(One-Class Support Vector Machine, OC-SVM)和支持向量域描述(Support Vector Data Description, SVDD)的高斯核參數(shù)優(yōu)化問(wèn)題,定義了樣本的信息熵,且令信息熵大的樣本靠近分類界面,信息熵小的樣本遠(yuǎn)離分類界面,通過(guò)最大化邊界樣本的信息熵同時(shí)最小化內(nèi)部樣本的信息熵學(xué)習(xí)最優(yōu)的高斯核函數(shù)。文獻(xiàn)[50]分析了地面感興趣目標(biāo)和典型地面干擾在雙圓極化和不同帶寬下的電磁散射差異,提取了其在不同極化體制下的差異性特征,并利用SVDD分類器進(jìn)行干擾拒判,取得較好的效果,并得出以下結(jié)論: 雷達(dá)帶寬較大時(shí),目標(biāo)回波蘊(yùn)含的細(xì)節(jié)信息越多,識(shí)別性能越高。
在開(kāi)集識(shí)別方面,文獻(xiàn)[86]分別研究了有先驗(yàn)知識(shí)下的開(kāi)集HRRP識(shí)別和無(wú)先驗(yàn)知識(shí)的開(kāi)集HRRP目標(biāo)識(shí)別。有先驗(yàn)知識(shí)下的開(kāi)集HRRP識(shí)別思路為: 假設(shè)輸入的n個(gè)樣本屬于同一目標(biāo),則在進(jìn)行識(shí)別時(shí),若n個(gè)樣本大部分被分為同一目標(biāo),則認(rèn)為這些樣本為該類目標(biāo); 若該n個(gè)距離像中大部分樣本被分類器拒判,則認(rèn)為出現(xiàn)了新的目標(biāo)。無(wú)先驗(yàn)知識(shí)下的開(kāi)集HRRP識(shí)別思路為: 利用模糊極大極小神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練、識(shí)別,并設(shè)定閾值,若測(cè)試樣本屬于已知類別隸屬度均小于閾值,則拒判該樣本,否則將其判為隸屬度最大的類別。文獻(xiàn)[87]提出基于多分類器融合技術(shù)的雷達(dá)目標(biāo)識(shí)別與拒判方法,首先設(shè)計(jì)了多分類器-最近鄰系統(tǒng),兼顧了分類器的識(shí)別和拒判性能,然后將多分類器融合技術(shù)應(yīng)用到分類器-最近鄰系統(tǒng)的識(shí)別和拒判兩個(gè)階段。該方法充分發(fā)揮了不同特征不同分類器的優(yōu)勢(shì),從而能夠得到較高的識(shí)別和拒判性能。文獻(xiàn)[88]針對(duì)HRRP的識(shí)別問(wèn)題,將極值理論引入隨機(jī)森林分類器,使得輸出能夠確定測(cè)試樣本是否應(yīng)作為未知類被拒絕。文獻(xiàn)[89]針對(duì)SAR目標(biāo)識(shí)別中的拒判問(wèn)題,提出對(duì)每類建立一個(gè)封閉邊界的思路。該文首先確定每類的邊界樣本,然后利用邊界樣本擬合了樣本被認(rèn)為是已知樣本的概率曲線,最后對(duì)每類樣本的曲線進(jìn)行整合,得到最終的封閉邊界曲線。
3.3 群目標(biāo)識(shí)別技術(shù)研究現(xiàn)狀
目前,群目標(biāo)識(shí)別技術(shù)的研究主要有兩種思路: (1)對(duì)多目標(biāo)進(jìn)行分辨再進(jìn)行目標(biāo)識(shí)別; (2)將多目標(biāo)回波作為一個(gè)整體建模直接進(jìn)行目標(biāo)識(shí)別。
對(duì)多目標(biāo)進(jìn)行分辨再進(jìn)行目標(biāo)識(shí)別的關(guān)鍵是多目標(biāo)分辨。文獻(xiàn)[90]是采用獨(dú)立成分分析(Independent Component Analysis,ICA)算法直接在時(shí)域完成多目標(biāo)回波分離。這種方法對(duì)于點(diǎn)目標(biāo)且回波在距離維無(wú)重疊時(shí)效果較好,當(dāng)距離維重疊時(shí)由于多目標(biāo)回波完全相關(guān)而導(dǎo)致性能下降; 另外,該方法會(huì)將具有多個(gè)強(qiáng)散射中心的擴(kuò)展目標(biāo)回波分割為多個(gè)子目標(biāo),不適用于擴(kuò)展目標(biāo)。文獻(xiàn)[91]基于單脈沖測(cè)角信息和高分辨距離像,提出一種基于非先驗(yàn)依賴密度聚類(Prior-Independent Density-Based Spatial Clustering of Applications with Noise,PI-DBSCAN)的HRRP多目標(biāo)識(shí)別方法。其主要思想是利用單脈沖測(cè)角得到HRRP每個(gè)采樣點(diǎn)的方位角,并把其投影到徑向-方位向距離平面,然后利用PI-DBSCAN聚類算法在徑向-方位向距離平面對(duì)采樣點(diǎn)進(jìn)行聚類,根據(jù)聚類結(jié)果完成子目標(biāo)HRRP的分離,再分別對(duì)各個(gè)子目標(biāo)進(jìn)行分類識(shí)別。該方法對(duì)目標(biāo)運(yùn)動(dòng)狀態(tài)無(wú)約束,且不需要人為設(shè)置任何參數(shù)。為了解決文獻(xiàn)[91]中方法計(jì)算復(fù)雜度較高的問(wèn)題,文獻(xiàn)[92]提出一種基于加權(quán)均值漂移(Weighted Mean Shift,Weighted-MS)聚類算法的多目標(biāo)識(shí)別方法。該方法該采用Weighted-MS聚類完成各個(gè)子目標(biāo)HRRP的提取,計(jì)算復(fù)雜度較低,有利于彈載平臺(tái)下工程實(shí)現(xiàn)和應(yīng)用。
第二種思路是不進(jìn)行多目標(biāo)分離直接進(jìn)行目標(biāo)識(shí)別。文獻(xiàn)[93]利用旋轉(zhuǎn)不變子空間(Estimation of Signal Parameters via Rotational Invariance Techniques, ESPRIT)算法提取目標(biāo)的散射中心,然后與事先建好的多目標(biāo)散射中心模板庫(kù)進(jìn)行匹配。該方法不需要分離各子目標(biāo)回波,避免了由于分離結(jié)果不準(zhǔn)確而帶來(lái)的影響。然而,由于HRRP的姿態(tài)敏感性和多目標(biāo)相對(duì)姿態(tài)組合多,該方法的模板庫(kù)非常大且有較高的運(yùn)算量,可實(shí)現(xiàn)的難度較大。
4 發(fā)展趨勢(shì)
雖然國(guó)內(nèi)外學(xué)者針對(duì)雷達(dá)地面目標(biāo)識(shí)別技術(shù)展開(kāi)了大量研究,積累了一大批卓有意義的理論和技術(shù)成果,但仍存在一些問(wèn)題尚未解決或處理的不盡如人意。彈載雷達(dá)地面目標(biāo)識(shí)別技術(shù)具有充足的發(fā)展空間,未來(lái)可以從以下幾個(gè)方面進(jìn)行研究:
(1) 成像、檢測(cè)與識(shí)別一體化設(shè)計(jì)技術(shù)。目前,二維成像技術(shù)的研究一般是以提升成像質(zhì)量為目標(biāo),這在遙感領(lǐng)域具有重要意義。然而,在機(jī)載、彈載等空中平臺(tái)雷達(dá)的軍事應(yīng)用中,成像的最終目標(biāo)是提升目標(biāo)的檢測(cè)識(shí)別概率,以提升成像質(zhì)量為單一目標(biāo)的成像技術(shù)不能滿足現(xiàn)實(shí)軍事需求。建立一種以任務(wù)(檢測(cè)、識(shí)別率)為導(dǎo)向的成像、檢測(cè)與識(shí)別一體化設(shè)計(jì)技術(shù)是未來(lái)發(fā)展的一個(gè)重要方向。
(2) 小樣本甚至零樣本目標(biāo)識(shí)別技術(shù)。在實(shí)際應(yīng)用中,需要識(shí)別的目標(biāo)通常是非合作的,無(wú)法得到足夠的樣本量進(jìn)行訓(xùn)練,甚至沒(méi)有樣本進(jìn)行訓(xùn)練。雖然小樣本目標(biāo)識(shí)別問(wèn)題已取得些許發(fā)展,但是這些技術(shù)離實(shí)際應(yīng)用還有很大距離,必須發(fā)展適合工程應(yīng)用的小樣本目標(biāo)識(shí)別技術(shù)。
(3) 具有終身學(xué)習(xí)的能力。傳統(tǒng)雷達(dá)定型后,識(shí)別算法模型不再更新,性能不會(huì)隨著不斷使用而不斷提升。未來(lái)雷達(dá)一方面會(huì)終身學(xué)習(xí),并利用工作中學(xué)習(xí)到的信息優(yōu)化算法模型,更新環(huán)境、目標(biāo)和干擾的知識(shí)庫(kù),最終實(shí)現(xiàn)裝備越用越好; 另一方面,當(dāng)前雷達(dá)會(huì)利用其他雷達(dá)傳感器學(xué)習(xí)到知識(shí),更新或者完善自身算法模型。
(4) 具備協(xié)同識(shí)別能力。雷達(dá)可以與同一平臺(tái)的其他波段雷達(dá)、光學(xué)、紅外傳感器開(kāi)展融合識(shí)別,也可以與其他平臺(tái)(其他彈、星載、機(jī)載)的傳感器協(xié)同成像和識(shí)別,合理利用體系中的傳感器資源有利于對(duì)目標(biāo)形成全方位的認(rèn)知,從而提高識(shí)別性能。
5 結(jié) 束 語(yǔ)
雷達(dá)地面目標(biāo)識(shí)別技術(shù)對(duì)精確打擊武器,特別是空地導(dǎo)彈具有重要意義。如何提高雷達(dá)地面目標(biāo)識(shí)別的性能,是當(dāng)前研究的重點(diǎn)。本文首先介紹了雷達(dá)目標(biāo)識(shí)別技術(shù)的概念,然后分析了雷達(dá)導(dǎo)引頭地面目標(biāo)識(shí)別技術(shù)面向裝備應(yīng)用面臨的問(wèn)題,隨后基于問(wèn)題解決方法介紹了地面目標(biāo)識(shí)別技術(shù)的研究現(xiàn)狀,最后對(duì)其發(fā)展趨勢(shì)進(jìn)行了展望。人工智能等學(xué)科的發(fā)展為雷達(dá)地面目標(biāo)識(shí)別技術(shù)的難點(diǎn)解決提供了新的可能,值得從業(yè)者關(guān)注。
參考文獻(xiàn):
[1] 張錦. 電子戰(zhàn)飛機(jī),信息化戰(zhàn)爭(zhēng)的“刀斧手”[N]. 環(huán)球時(shí)報(bào), 2021-09-23(8).
Zhang Jin. Electronic Warfare Aircraft, the "Chopper" of Information War[N].Global Times, 2021-09-23(8). (in Chinese)
[2] 楊揚(yáng), 張兆鑫. 未來(lái)戰(zhàn)爭(zhēng)中的電子戰(zhàn)系統(tǒng)及其影響[J]. 軍事文摘, 2021(12): 41-45.
Yang Yang, Zhang Zhaoxin. Electronic Warfare System and Its Influence in Future War[J]. Military Digest, 2021(12): 41-45.(in Chinese)
[3] 王握文, 雷雯. 科技創(chuàng)新改變戰(zhàn)爭(zhēng)樣式[N]. 解放軍報(bào), 2021-08-06(11).
Wang Wowen, Lei Wen. Scientific and Technological Innovation Changes the Style of War[N]. PLA Daily, 2021-08-06(11). (in Chinese)
[4] 武江濤. 彈載智能雷達(dá)導(dǎo)引技術(shù)架構(gòu)及處理方法綜述[J]. 信息技術(shù)與信息化, 2020(7): 136-138.
Wu Jiangtao. Overview of Missile Borne Intelligent Radar Guidance Technology Architecture and Processing Methods [J]. Information Technology and Informatization, 2020(7): 136-138.(in Chinese)
[5] 杜蘭. 雷達(dá)高分辨距離像目標(biāo)識(shí)別方法研究[D]. 西安: 西安電子科技大學(xué), 2007: 1-14.
Du Lan. Study on Radar HRRP Target Recognition[D]. Xian: Xidian University, 2007: 1-14.(in Chinese)
[6] 王曉丹, 王積勤. 雷達(dá)目標(biāo)識(shí)別技術(shù)綜述[J]. 現(xiàn)代雷達(dá), 2003 (5): 22-26.
Wang Xiaodan, Wang Jiqin. A Survey of Radar Target Recognition Technique[J]. Modern Radar, 2003 (5): 22-26.(in Chinese)
[7] 馬林. 雷達(dá)目標(biāo)識(shí)別技術(shù)綜述[J]. 現(xiàn)代雷達(dá), 2011, 33(6): 1-7.
Ma Lin. Review of Radar Automatic Target Recognition[J]. Mo-dern Radar, 2011, 33(6): 1-7.(in Chinese)
[8] El-Darymli K, Gill E W, Mcguire P, et al. Automatic Target Re-cognition in Synthetic Aperture Radar Imagery: A State-of-the-Art Review[J]. IEEE Access, 2016, 4: 6014-6058.
[9] 莊釗文, 黎湘, 劉永祥. 智能化武器系統(tǒng)發(fā)展的關(guān)鍵技術(shù)——雷達(dá)自動(dòng)目標(biāo)識(shí)別技術(shù)[J]. 科技導(dǎo)報(bào), 2005, 23(8): 20-23.
Zhuang Zhaowen, Li Xiang, Liu Yongxiang. Radar Target Recognition: A Key Technology for Development of Intelligent Weapons[J]. Science & Technology Review, 2005, 23(8): 20-23.(in Chinese)
[10] 趙丹輝, 王俊敏, 張宏宇, 等. 精確制導(dǎo)武器導(dǎo)航與末制導(dǎo)技術(shù)發(fā)展綜述[J]. 飛航導(dǎo)彈, 2021(2): 64-70.
Zhao Danhui, Wang Junmin, Zhang Hongyu, et al. Overview of the Development of Navigation and Terminal Guidance Technology for Precision Guided Weapons [J]. Aerodynamic Missile Journal, 2021(2): 64-70.(in Chinese)
[11] 郭鵬程. 復(fù)雜背景下雷達(dá)地面目標(biāo)檢測(cè)與識(shí)別技術(shù)研究[D]. 西安: 西安電子科技大學(xué), 2021: 1-8.
Guo Pengcheng. Detection and Recognition for Radar Ground Target in Complex Environments[D]. Xian: Xidian University, 2021: 1-8. (in Chinese)
[12] 李明. 雷達(dá)目標(biāo)識(shí)別技術(shù)研究進(jìn)展及發(fā)展趨勢(shì)分析[J]. 現(xiàn)代雷達(dá), 2010, 32(10): 1-8.
Li Ming. Research Progress and Development Trend Analysis on Radar Target Recognition Technique[J]. Modern Radar, 2010, 32(10): 1-8.(in Chinese)
[13] 李龍. 基于高分辨距離像的雷達(dá)地面目標(biāo)識(shí)別技術(shù)[D]. 西安: 西安電子科技大學(xué), 2017: 1-10.
Li Long. Radar Ground Target Recognition Based on High Resolution Range Profiles[D]. Xian: Xidian University, 2017: 1-10.(in Chinese)
[14] 李全龍, 劉洪娟, 余硌. 基于聚類思想的戰(zhàn)場(chǎng)群目標(biāo)識(shí)別方法[J]. 計(jì)算機(jī)工程, 2007, 33(15): 193-195.
Li Quanlong, Liu Hongjuan, Yu Luo. Group of Targets Recognition Method in Battlefield Based on Cluster Thought[J]. Computer Engineering, 2007, 33(15): 193-195.(in Chinese)
[15] 喬偉, 王匯源, 吳曉娟, 等. 基于混沌動(dòng)力學(xué)模型的群體目標(biāo)檢測(cè)與分類[J]. 山東大學(xué)學(xué)報(bào)(工學(xué)版), 2010, 40(2): 19-23.
Qiao Wei, Wang Huiyuan, Wu Xiaojuan, et al. Crowd Object Detection and Classification Based on a Chaotic Dynamic Model[J]. Journal of Shandong University (Engineering Science), 2010, 40(2): 19-23.(in Chinese)
[16] Pei B N, Bao Z, Xing M D. Logarithm Bispectrum-Based Approach to Radar Range Profile for Automatic Target Recognition[J]. Pattern Recognition, 2002, 35(11): 2643-2651.
[17] Chandran V, Elgar S L. Pattern Recognition Using Invariants Defined from Higher Order Spectra—One-Dimensional Inputs[J]. IEEE Transactions on Signal Processing, 1993, 41(1): 205-212.
[18] Tugnait J K. Detection of Non-Gaussian Signals Using Integrated Polyspectrum[J]. IEEE Transactions on Signal Processing, 1994, 42(11): 3137-3149.
[19] Liao X J, Bao Z. Circularly Integrated Bispectra: Novel Shift Invariant Features for High-Resolution Radar Target Recognition[J]. Electronics Letters, 1998, 34(19): 1879-1880.
[20] Zhang X D, Shi Y, Bao Z. A New Feature Vector Using Selected Bispectra for Signal Classification with Application in Radar Target Recognition[J]. IEEE Transactions on Signal Processing, 2001, 49(9): 1875-1885.
[21] 付耀文, 賈宇平, 莊釗文. 基于一維散射中心匹配的雷達(dá)目標(biāo)識(shí)別[J]. 電子學(xué)報(bào), 2006, 34(3): 404-408.
Fu Yaowen, Jia Yuping, Zhuang Zhaowen. Radar Target Classification Based on One Dimensional Scattering Centers Matching[J]. Acta Electronica Sinica, 2006, 34(3): 404-408.(in Chinese)
[22] Du L, He H, Zhao L, et al. Noise Robust Radar HRRP Target Recognition Based on Scatterer Matching Algorithm[J]. IEEE Sensors Journal, 2016, 16(6): 1743-1753.
[23] Zhao C K, He X D, Liang J, et al. Radar HRRP Target Recognition via Semi-Supervised Multi-Task Deep Network[J]. IEEE Access, 2019, 7: 114788-114794.
[24] Zhang Y F, Qian F C, Xiao F. GS-RNN: A Novel RNN Optimization Method Based on Vanishing Gradient Mitigation for HRRP Sequence Estimation and Recognition[C]∥IEEE 3rd International Conference on Electronics Technology, 2020: 840-844.
[25] 李瑋杰, 楊威, 黎湘, 等. 一種噪聲環(huán)境下的雷達(dá)目標(biāo)高分辨率距離像魯棒識(shí)別方法[J]. 雷達(dá)學(xué)報(bào), 2020, 9(4): 622-631.
Li Weijie, Yang Wei, Li Xiang, et al. Robust High Resolution Range Profile Recognition Method for Radar Targets in Noisy Environments[J]. Journal of Radars, 2020, 9(4): 622-631.(in Chinese)
[26] Zhang L, Li Y, Wang Y H, et al. Polarimetric HRRP Recognition Based on ConvLSTM with Self-Attention[J]. IEEE Sensors Journal, 2021, 21(6): 7884-7898.
[27] Liu H W, Yang Z, He K, et al. Radar High Range Resolution Profiles Recognition Based on Wavelet Packet and Subband Fusion[C]∥ IEEE International Conference on Acoustics, Speech, and Signal Processing, 2005.
[28] Huether B M, Gustafson S C, Broussard R P. Wavelet Preprocessing for High Range Resolution Radar Classification[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(4): 1321-1332.
[29] Zhang L, Long T, Li Y, et al. Dual Polarimetric HRRP Sequence Recognition Based on H/α Features[C]∥IEEE International Conference on Signal, Information and Data Processing, 2019: 1-5.
[30] 王晶晶, 劉崢, 謝榮, 等. 聯(lián)合Cameron分解和融合RKELM的全極化HRRP目標(biāo)識(shí)別方法[J]. 雷達(dá)學(xué)報(bào), 2021,10(6): 944-955.
Wang Jingjing, Liu Zheng, Xie Rong, et al. HRRP Target Recognition Method for Full Polarimetric Radars by Combining Cameron Decomposition and Fusing RKELM[J]. Journal of Radar, 2021,10(6): 944-955. (in Chinese)
[31] Garzon-Guerrero J A, Ruiz D P, Carrion M C. Classification of Geometrical Targets Using Natural Resonances and Principal Components Analysis[J]. IEEE Transactions on Antennas and Propagation, 2013, 61(9): 4881-4884.
[32] Fu J S, Liao K, Yang W L. Radar HRRP Target Recognition Using Multi-KFD-Based LDA Algorithm[J]. Progress in Electromagnetics Research C, 2012, 30: 15-26.
[33] Lee K C, Ou J S, Fang M C. Application of SVD Noise-Reduction Technique to PCA Based Radar Target Recognition[J]. Progress in Electromagnetics Research, 2008, 81: 447-459.
[34] Feng B, Chen B, Liu H W. Radar HRRP Target Recognition with Deep Networks[J]. Pattern Recognition, 2017, 61: 379-393.
[35] 侯慶禹. 基于高分辨距離像的雷達(dá)自動(dòng)目標(biāo)識(shí)別方法研究[D]. 西安: 西安電子科技大學(xué), 2009: 52-62.
Hou Qingyu. Study of Radar Automatic Target Recognition Methods Based on High Range Resolution Profile[D]. Xian: Xidian University, 2009: 52-62.(in Chinese)
[36] Copsey K, Webb A. Bayesian Gamma Mixture Model Approach to Radar Target Recognition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1201-1217.
[37] Webb A R. Gamma Mixture Models for Target Recognition[J]. Pattern Recognition, 2000, 33(12): 2045-2054.
[38] Du L, Liu H W, Bao Z, et al. A Two-Distribution Compounded Statistical Model for Radar HRRP Target Recognition[J]. IEEE Transactions on Signal Processing, 2006, 54(6): 2226-2238.
[39] Du L, Liu H W, Wang P H, et al. Noise Robust Radar HRRP Target Recognition Based on Multitask Factor Analysis with Small Training Data Size[J]. IEEE Transactions on Signal Processing, 2012, 60(7): 3546-3559.
[40] 王鵬輝. 基于統(tǒng)計(jì)建模的雷達(dá)高分辨距離像目標(biāo)識(shí)別方法研究[D]. 西安: 西安電子科技大學(xué), 2012: 39-50.
Wang Penghui. Study of Radar High Resolution Range Profile Target Recognition Based on Statistical Modeling[D]. Xian: Xidian University, 2012: 39-50.(in Chinese)
[41] Feng B, Du L, Liu H W, et al. Radar HRRP Target Recognition Based on K-SVD Algorithm[C]∥ IEEE CIE International Conference on Radar, 2011: 642-645.
[42] Feng B, Du L, Shao C Y, et al. Radar HRRP Target Recognition Based on Robust Dictionary Learning with Small Training Data Size[C]∥ IEEE Radar Conference, 2013: 1-4.
[43] Wang C Y, Kong Y H. Radar HRRP Target Recognition Based on Coherence Reduced Stagewise K-SVD[C]∥XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), 2014: 1-4.
[44] Li L, Liu Z. Noise-Robust HRRP Target Recognition Method via Sparse-Low-Rank Representation[J]. Electronics Letters, 2017, 53(24): 1602-1604.
[45] Guo C, Xu C A, Sun S, et al. The Denoise and Reconstruction Method for Radar HRRP Using Enhanced Sparse Auto-Encoder[C]∥ IEEE International Conference on Signal, Information and Data Processing, 2019: 1-4.
[46] 馬筱青. 寬帶雷達(dá)地面目標(biāo)識(shí)別算法與系統(tǒng)設(shè)計(jì)[D]. 西安: 西安電子科技大學(xué), 2014: 21-26.
Ma Xiaoqing. Ground Target Classification Algorithm and System Design Based on Wide Band Radar[D]. Xian: Xidian University, 2014: 21-26.(in Chinese)
[47] 郭鵬程, 劉崢, 羅丁利. 基于兩次異常檢測(cè)的雷達(dá)HRRP雜波穩(wěn)健目標(biāo)識(shí)別方法[J]. 系統(tǒng)工程與電子技術(shù), 2019, 41(10): 2221-2226.
Guo Pengcheng, Liu Zheng, Luo Dingli. Radar HRRP Clutter Robust Target Recognition Method Based on Double Anomaly Detection[J]. Systems Engineering and Electronics, 2019, 41(10): 2221-2226.(in Chinese)
[48] Sohn K, Zhou G, Lee C, et al. Learning and Selecting Features Jointly with Point-Wise Gated Boltzmann Machines[C]∥International Conference on Machine Learning, 2013.
[49] 鄧盛. 基于自動(dòng)編碼器的高分辨雷達(dá)目標(biāo)識(shí)別研究[D]. 西安: 西安電子科技大學(xué), 2018: 43-52.
Deng Sheng. Auto Encoder Based Methods for High Resolution Radar Target Recognition[D]. Xian: Xidian University, 2018: 43-52.(in Chinese)
[50] 馬曉瑛. 寬帶極化雷達(dá)地面目標(biāo)識(shí)別技術(shù)研究[D]. 西安: 西安電子科技大學(xué), 2020: 9-22.
Ma Xiaoying. Research on Ground Target Recognition Technology of Wideband Polarization Radar[D]. Xian: Xidian University, 2020: 9-22.(in Chinese)
[51] Lundén J, Koivunen V. Deep Learning for HRRP-Based Target Recognition in Multistatic Radar Systems[C]∥IEEE Radar Conference, 2016: 1-6.
[52] Ding J, Chen B, Liu H W, et al. Convolutional Neural Network with Data Augmentation for SAR Target Recognition[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(3): 364-368.
[53] Guo J Y, Lei B, Ding C B, et al. Synthetic Aperture Radar Image Synthesis by Using Generative Adversarial Nets[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(7): 1111-1115.
[54] Lewis B, Wong A, Liu J. Generative Adversarial Networks for SAR Image Realism[C]∥ Algorithms for Synthetic Aperture Radar Imagery XXV, 2018, 10647: 37-47.
[55] Liu W L, Zhao Y J, Liu M, et al. Generating Simulated SAR Images Using Generative Adversarial Network[C]∥Applications of Digital Image Processing XLI, 2018, 10752: 32-42.
[56] Zheng C, Jiang X, Liu X Z. Semi-Supervised SAR ATR via Multi-Discriminator Generative Adversarial Network[J]. IEEE Sensors Journal, 2019, 19(17): 7525-7533.
[57] 晏媛. 知識(shí)缺失條件下雷達(dá)目標(biāo)識(shí)別技術(shù)探究[D].北京: 中國(guó)電子科技集團(tuán)公司電子科學(xué)研究院, 2021:13-22.
Yan Yuan. Research on Radar Target Recognition Technology under the Condition of Lack of Knowledge [D]. Beijing: China Academic of Electronics and Information Technology, 2021:13-22. (in Chinese)
[58] Sun Y S, Wang Y H, Liu H W, et al. SAR Target Recognition with Limited Training Data Based on Angular Rotation Generative Network[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(11): 1928-1932.
[59] 和華, 杜蘭, 徐丹蕾, 等. 基于多任務(wù)復(fù)數(shù)因子分析模型的雷達(dá)高分辨距離像識(shí)別方法[J]. 電子與信息學(xué)報(bào), 2015, 37(10): 2307-2313.
He Hua, Du Lan, Xu Danlei, et al. Radar HRRP Target Recognition Method Based on Multi-Task Learning and Complex Factor Analysis[J]. Journal of Electronics & Information Technology, 2015, 37(10): 2307-2313.(in Chinese)
[60] Pan M, Jiang J, Li Z, et al. Radar HRRP Recognition Based on Discriminant Deep Autoencoders with Small Training Data Size[J]. Electronics Letters, 2016, 52(20): 1725-1727.
[61] Pan S J, Yang Q. A Survey on Transfer Learning[J]. IEEE Transactions on Knowledge and Data Engineering, 2010, 22(10): 1345-1359.
[62] Huang Z L, Pan Z X, Lei B. Transfer Learning with Deep Convolutional Neural Network for SAR Target Classification with Limited Labeled Data[J]. Remote Sensing, 2017, 9(9): 907.
[63] Malmgren-Hansen D, Kusk A, Dall J, et al. Improving SAR Automatic Target Recognition Models with Transfer Learning from Simulated Data[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(9): 1484-1488.
[64] Lang H T, Wu S W, Xu Y J. Ship Classification in SAR Images Improved by AIS Knowledge Transfer[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 439-443.
[65] Zhong C L, Mu X D, He X C, et al. SAR Target Image Classification Based on Transfer Learning and Model Compression[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(3): 412-416.
[66] Huang Z L, Pan Z X, Lei B. What, Where, and How to Transfer in SAR Target Recognition Based on Deep CNNs[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(4): 2324-2336.
[67] Liu J M, Xing M D, Yu H W, et al. EFTL: Complex Convolutional Networks with Electromagnetic Feature Transfer Learning for SAR Target Recognition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-11.
[68] Wen Y, Shi L C, Yu X, et al. HRRP Target Recognition with Deep Transfer Learning[J]. IEEE Access, 2020, 8: 57859-57867.
[69] Tang J X, Zhang F, Yin Q, et al. Synthetic Aperture Radar Target Recognition of Incomplete Training Datasets via Siamese Network[J]. The Journal of Engineering, 2019, 2019(20): 6845-6847.
[70] Tang J X, Zhang F, Zhou Y S, et al. A Fast Inference Networks for SAR Target Few-Shot Learning Based on Improved Siamese Networks[C]∥IEEE International Geoscience and Remote Sensing Symposium, 2019: 1212-1215.
[71] Li Y B, Li X, Sun Q, et al. SAR Image Classification Using CNN Embeddings and Metric Learning[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 1-5.
[72] Raj J A, Idicula S M, Paul B. One-Shot Learning-Based SAR Ship Classification Using New Hybrid Siamese Network[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 1-5.
[73] Liu Q, Zhang X Y, Liu Y X, et al. Multi-Polarization Fusion Few-Shot HRRP Target Recognition Based on Meta-Learning Framework[J]. IEEE Sensors Journal, 2021, 21(16): 18085-18100.
[74] Tian L, Chen B, Chen W C, et al. Domain-Aware Meta Network for Radar HRRP Target Recognition with Missing Aspects[J]. Signal Processing, 2021, 187(10): 108167.
[75] Wang K, Zhang G, Xu Y B, et al. SAR Target Recognition Based on Probabilistic Meta-Learning[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(4): 682-686.
[76] Wang S Y, Wang Y H, Liu H W, et al. Attribute-Guided Multi-Scale Prototypical Network for Few-Shot SAR Target Classification[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 12224-12245.
[77] Wang L, Bai X R, Xue R H, et al. Few-Shot SAR Automatic Target Recognition Based on Conv-BiLSTM Prototypical Network[J]. Neurocomputing, 2021, 443: 235-246.
[78] 晏媛, 孫俊, 孫晶明, 等. 雷達(dá)小樣本目標(biāo)識(shí)別方法及應(yīng)用分析[J]. 系統(tǒng)工程與電子技術(shù), 2021, 43(3): 684-692.
Yan Yuan, Sun Jun, Sun Jingming, et al. Radar few Shot Target Recognition Method and Application Analysis[J]. Systems Engineering and Electronics, 2021, 43(3): 684-692.(in Chinese)
[79] 孫晶明, 虞盛康, 孫俊. 基于元學(xué)習(xí)的雷達(dá)小樣本目標(biāo)識(shí)別方法及改進(jìn)[J/OL]. 系統(tǒng)工程與電子技術(shù): 1-9. (2021-12-28)[2022-01-13].http:∥kns.cnki.net/kcms/detail/11.2422.TN.20211227.1405.020.html.
Sun Jingming, Yu Shengkang, Sun Jun. Radar Target Small Sample Target Recognition Method Based on Meta Learning and Its Improvement [J/OL]. Systems Engineering and Electronics: 1-9. (2021-12-28)[2022-01-13].http:∥kns.cnki.net/kcms/detail/11.2422.TN.20211227.1405.020.html. (in Chinese)
[80] Fu K, Zhang T F, Zhang Y, et al. Few-Shot SAR Target Classification via Metalearning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-14.
[81] Yver B. Online Semi-Supervised Learning: Application to Dynamic Learning from RADAR Data[C]∥ International Radar Conference “Surveillance for a Safer World”, 2009: 1-6.
[82] Cui Z Y, Tang C, Cao Z J, et al. SAR Unlabeled Target Recognition Based on Updating CNN with Assistant Decision[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1585-1589.
[83] Wang J J, Liu Z, Xie R, et al. Radar HRRP Target Recognition Based on Dynamic Learning with Limited Training Data[J]. Remote Sensing, 2021, 13(4): 750.
[84] 李龍, 劉崢. 基于訓(xùn)練特征空間分布的雷達(dá)地面目標(biāo)鑒別器設(shè)計(jì)[J]. 電子與信息學(xué)報(bào), 2016, 38(4): 950-957.
Li Long, Liu Zheng. Identifier for Radar Ground Target Based on Distribution of Space of Training Features[J]. Journal of Electronics & Information Technology, 2016, 38(4): 950-957.(in Chinese)
[85] 張維. 特征降維和一類分類器研究及在雷達(dá)目標(biāo)識(shí)別中的應(yīng)用[D]. 西安: 西安電子科技大學(xué), 2020: 46-60.
Zhang Wei. Feature Dimensionality Reduction and One-Class Classifier with Applications to Radar Target Recognition[D]. Xian: Xidian University, 2020: 46-60.(in Chinese)
[86] 湯光華. 基于一維距離像的雷達(dá)目標(biāo)識(shí)別[D]. 南京: 南京理工大學(xué), 2006: 44-56.
Tang Guanghua. Radar Target Identification Based on Range Profiles[D]. Nanjing: Nanjing University of Science and Technology, 2006: 44-56.(in Chinese)
[87] 張學(xué)峰, 王鵬輝, 馮博, 等. 基于多分類器融合的雷達(dá)高分辨距離像目標(biāo)識(shí)別與拒判新方法[J]. 自動(dòng)化學(xué)報(bào), 2014, 40(2): 348-356.
Zhang Xuefeng, Wang Penghui, Feng Bo, et al. A New Method to Improve Radar HRRP Recognition and Outlier Rejection Performances Based on Classifier Combination[J]. Acta Automatica Sinica, 2014, 40(2): 348-356.(in Chinese)
[88] Wang Y H, Chen W, Song J, et al. Open Set Radar HRRP Re-cognition Based on Random Forest and Extreme Value Theory[C]∥International Conference on Radar (RADAR), 2018: 1-4.
[89] Dang S H, Cao Z J, Cui Z Y, et al. Open Set SAR Target Recognition Using Class Boundary Extracting[C]∥6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), 2019: 1-4.
[90] Lee S H, Lee S J, Choi I O, et al. ICA-Based Phase-Comparison Monopulse Technique for Accurate Angle Estimation of Multiple Targets[J]. IET Radar, Sonar & Navigation, 2018, 12(3): 323-331.
[91] Guo P C, Liu Z, Wang J J. HRRP Multi-Target Recognition in a Beam Using Prior-Independent DBSCAN Clustering Algorithm[J]. IET Radar, Sonar & Navigation, 2019, 13(8): 1366-1372.
[92] Guo P C, Liu Z, Wang J J. Radar Group Target Recognition Based on HRRPs and Weighted Mean Shift Clustering[J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1152-1159.
[93] Jia H T, Li J, Yang T L, et al. Based on Improved ESPRIT Algorithm Radar Multi-Target Recognition[C]∥ IEEE 11th International Conference on Dependable, Autonomic and Secure Computing, 2013: 416-421.
Status and Prospects of Radar Ground Target Recognition Technology
Guo Pengcheng*, Wang Jingjing, Yang Longshun
(Xian Electronic Engineering Research Institute, Xian 710100, China)
Abstract: Radar ground target recognition technology is an important technical base for intellectualization and informatization of radar seeker of air-to-ground missile. Recently, ground target recognition technology has been paid much attention by researchers. However, with the increasingly fierce offensive and defensive confrontation in modern war, the application of radar ground target recognition technology is facing many problems, which has become a bottleneck factor restricting the development of weapons for a long time. To ensure that relevant radar practitioners better understand the development and future trend of this field, this paper? introduces the conception of radar target recognition technology, and? summarizes the technical difficulties of radar ground target recognition for equipment application. Afterwards, the research status at home and abroad are reviewed. Finally, the development trend of this technology is prospected.
Key words: radar ground target recognition; precision guidance; noise robustness; clutter robustness; small training samples; group targets; air-to-ground missile