三維激光掃描技術在新首鋼冬奧項目中的應用
2022-05-18 13:02:44銀振華
北京測繪 2022年4期
銀振華
(北京首鋼國際工程技術有限公司, 北京 100043)
0 引言
新首鋼園區在服務冬奧的基礎上保留自己原有的鋼鐵工業氣息,對既有的工業遺址設施進行改造利用,將工業和冬奧兩種文化互相交融,形成時代的標志。
工業設施(包括工業建、構筑物)改造和再利用的首要任務便是對現有設施結構的測繪,冬奧項目啟動初期,面對單體量大、規模大、原始圖紙缺失的首鋼工業遺址,采集基礎數據成了大難題。北京首鋼國際工程技術有限公司于2014年在冬奧組委辦公地首鋼西十筒倉改造中,率先引進了三維激光掃描技術,并將其應用到了冬奧項目工業設施的改造測量工作中。目前已經開展三維激光掃描項目40余項,掃描各類異形工業設施達到350項,合同額達1500萬元,打通了三維掃描技術流程。本文在三維激光掃描技術的基礎上,通過冬奧配套服務項目(金安橋站交通一體化及工業遺存修繕)掃描測繪的實例,詳細研究了三維激光掃描獲取數據的流程、數據處理以及成果形成的方法。
三維激光掃描技術,又稱實景復制技術,是近年發展起來的一項新型的立體測繪技術,可以深入到復雜的現場環境中,進行掃描操作,能夠快速、自動化、全方位、非接觸、高精度、大面積、高分辨率且海量地獲取被測對象的三維坐標,構建出被測對象精準的三維立體模型[1]。
利用三維激光掃描技術可實現工業設施的數據采集和現狀平、立、剖面圖繪制,為研究改造工作提供準確、翔實的數據,是工業遺址改造服務冬奧的一個重要環節。其內容涉及工業設施的四至關系、地形、面積、形狀、高度、門窗位置、尺寸、內部柱梁平面尺寸及定位、立面、截面及其彼此間的搭接關系,桁架、天車、軌道等的位置、標高等[2]。傳統的工業設施測量主要為二維平面測量,基本采用全站儀配合鋼尺量距的方式完成,為單點測量,其數據缺乏整體性。隨著科學技術的發展,建設方、設計方在要求測繪人員繪制出建構筑物平、立、剖面圖的同時,提出了三維建模的需求,即將工業遺址的空間點位數據和紋理影像數據完整、真實、準確地搬到計算機中,建立數字檔案,為工業遺存的存檔、保護、修復、設計提供技術支持[3]。同時,在實際工作中,作業員也經常遇到工業設施年久失修,階梯、通廊等嚴重破損的情況,存在爬上爬下的安全隱患,而三維激光掃描技術的引進,既提高了工作效率,同時也降低了安全隱患。
1 工程應用實例
1.1 工程簡介
冬奧首鋼工業遺址公園(金安橋站交通一體化及工業遺存修繕)項目是充分利用首鋼獨特的工業遺跡資源及區位優勢,以服務冬奧為契機,打造集高端數字智能、工業文化創意、服務冬奧配套等為一體的高端辦公區、冰雪運動與康體運動娛樂休閑區、旗艦店/主力店為核心的文化娛樂區。該項目位于北京市石景山區新首鋼高端產業綜合服務區東北角,總占地面積為18.6 ha。其中,建設用地面積為13.3 ha,代征綠化用地面積為5.1 ha。
該項目的工業設施大部分于1949年建成投產,2010年停產,歷經多次改造,工業設施與原設計已有多處不符的情況,原設計圖紙不能作為改造依據。遂在本次工作中采用三維激光掃描技術來獲取原始數據,重新將建筑設施還原,解決設計改造工作的前期難題。
本次測繪的主要內容包括工業建筑設施的單體測繪,以及通廊桁架位置關系和詳細尺寸。根據建設方以及設計方對測繪內容及單體要求,擬定了三維激光技術與傳統工程測量技術相結合的方式,利用三維掃描技術滿足單體平、立、剖面尺寸,層數,層高,柱子和梁尺寸,結合三維模型豐富的成果質量。采用傳統測量完成總圖定位測量,同時校對檢查三維掃描成果[4]。
1.2 整體思路與技術路線
整體遵循先控制后細部的原則,建立測區控制網后,通過全球定位系統(global positioning system,GPS)、全站儀、水準儀聯測廠房外部已知點,在工業設施內外部設立足夠數量、精度可靠的控制點,通過地面三維激光掃描技術手段獲取工業設施整體三維點云數據,制作工業設施各位置點云剖面,通過特征提取,整理出一系列設計及施工用到的計算機輔助設計((computer aided design,CAD)成果,并進行三維原始數據留存。工業設施整體平面圖精度小于5 cm,重點部位點云精度為2 mm。
2 工程實施
三維激光掃描的目的是獲取被測物體的三維輪廓數據,進而快速重構出目標的場景三維模型及線、面、體、空間等各種制圖數據。主要包括數據采集與數據后續處理等過程。第一步數據采集包括建立控制網以及現場掃描等工作,第二步數據處理包括點云拼接、坐標轉換、點云覆色等,最后在應用數據方面包括建立表面模型、紋理映射、輸出到CAD等。具體流程如圖1所示。
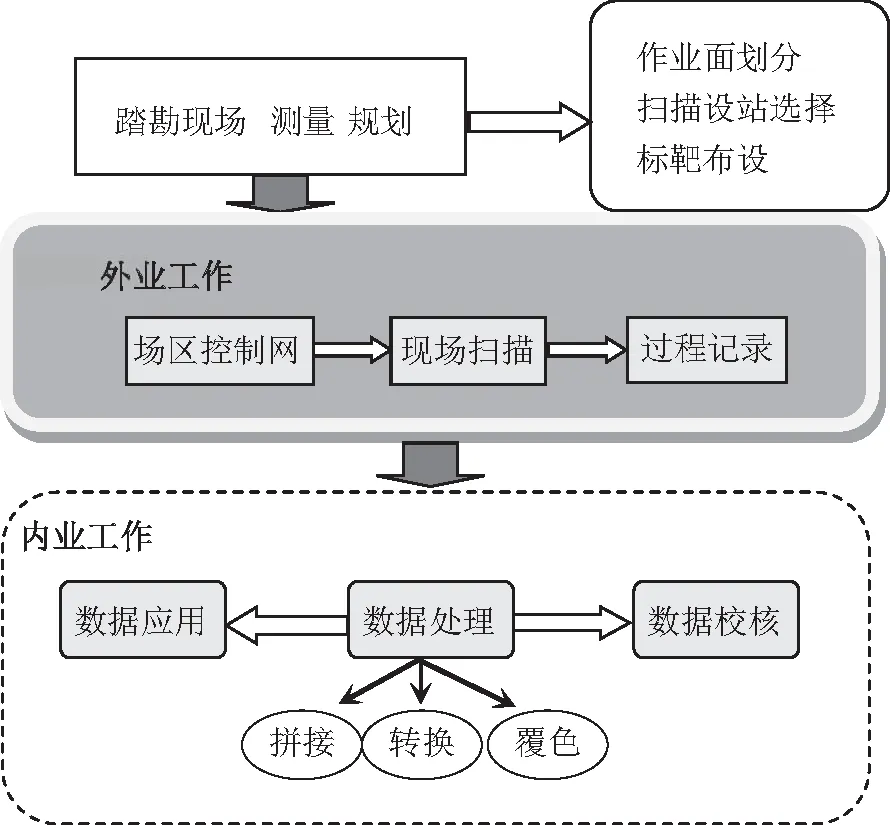
圖1 工作流程圖
2.1 控制測量
控制測量是工程建設中各項測量工作的基礎,是三維掃描工作的基準和框架,目的是精確測定控制點和部分關鍵點的三維坐標,保證測量坐標系的一致。
本次工程采用全球導航衛星系統(global navigation satellite system,GNSS)連續運行參考站網虛擬參考站(virtual reference station,VRS)技術,布設工程平面控制點。采用直接水準方式,布設工程高程控制點。
精度等級設置為平面控制二級、高程控制三等。工程采用GPS實時動態載波相位差分技術(real time kinematic,RTK)+全站儀極坐標法相結合的方式進行建構筑物單體總圖定位工作,采用激光三維掃描方式進行建構筑物單體之梁、板、柱、架的平、立、剖面尺寸測繪。
2.2 三維激光掃描測量外業實施
在先期對項目內各個單體建筑及設備設施周邊進行控制測量的基礎上,采用三維激光掃描技術對建構筑物單體等設備設施進行全方位精確的三維激光掃描,形成構筑物及其設施的整體點云數據和影像數據,再經過特征提取,獲取建、構筑物各個部件的三維精確尺寸,生成設計方需求的平、立剖面圖,完整地表現各種設備設施的尺寸信息和搭接關系,提供精準數據,完成三維原始數據留存工作,并進行三維建模[5]。
對于大規模的三維掃描作業,在外業實施過程中,應做好掃描過程記錄,記錄內容包括測站與控制標靶的對應關系,測站站號對應需要校核的結構(梁、柱、門窗、洞口等),以便后續數據處理與檢核。
2.2.1整體掃描
在本次工程中,為保證待測物整體范圍內數據精度的準確,掃描前期進行了靶紙與控制測量點的聯測工作。工業設施內整體地形、地物、屋頂、桁架、柱體、鐵路、溝道,選擇使用Faro 3D X330掃描儀進行掃描,該掃描儀主要特點為外形小巧、拼接方便、輕便實用。掃描過程中,為保證掃描儀設置測站間隔控制在8~15 m,在坑體、鐵軌等地物附近另設加密掃描,以確保數據的完整性。為滿足數據拼接精度,掃描過程中掃描儀設定在1/2模式下高精度掃描,確保了掃描數據的點間距控制在3 mm以內。工業設施內部整體平面掃描外業共進行30 d,架設測站340處,原始數據量達350 GB。
2.2.2單體細部掃描
工業設施內關鍵柱體及桁架、魚腹梁等構件使用法如350型掃描儀的使用方法進行掃描。該掃描儀測量精度高、掃描速度快,還具有一系列輔助功能。為保證廠房整體范圍內數據精度的準確,掃描過程前期選取單體工業設施內6處布設反射片,與控制測量進行聯測。重點工業設施掃描外業共15 d,架設測站200余站,原始數據量達120 GB。
2.3 點云數據處理
點云數據處理的完整過程包括點云數據預處理、測站拼接、實體模建立、數據結果的輸出等步驟。對三維點云數據進行預處理,一般需要對獲取的原始數據進行再加工,檢查數據的完整性及數據的一致性,進行數據格式的規范化、進行點云去噪、配準、抽稀、分塊和導出等操作[6]。
2.3.1數據預處理
在進行配準之前,首先要進行數據預處理。因為在掃描物體時,由于遮擋等原因,采集的數據不只是我們需要的數據,其中還包括很多我們不感興趣的數據,例如,物體周圍的花草樹木、車流、人群等,這樣就必須在配準之前,利用數據的預處理功能把我們感興趣的數據提取出來。預處理的方法很多,可以利用激光強度把同一類物體同時選中后刪除、人工選取等方法。去除噪聲剔除冗余數據的過程是,逐站將激光掃描數據導入點云處理軟件,通過軟件的過濾功能自動去除噪聲點云,得到濾波點云數據。
2.3.2測站拼接
將三維激光掃描儀獲取的原始點云數據導入到儀器自帶點云處理軟件中,設置拼站參數自動進行站點拼接,這個過程叫作數據配準。
每一個視點的數據都有一個獨立的測站坐標系,數據配準就是把不同視點的數據統一到一個坐標系下,使之成為一個整體。三維激光數據配準一直是地面三維激光技術的重點和難點,配準的精度直接影響到后期成果的精度。根據工程特點,地面三維激光數據配準方法大致分為兩種,一種是基于特征的數據配準,另一種是迭代數據配準。根據工程特點,路線較為復雜,測站布置相對密集,選用特征標靶球配準,能夠更好地提高配準精度。
另外,把點云整體作為一種特征來一起參與計算,要比單獨使用標靶計算精度要高。
2.3.3坐標轉換
點云配準完成后,點云的坐標系為掃描儀測站的自定義坐標系,在進行平、立、剖面的繪制之前,需要進行坐標系轉換,把點云坐標轉換在控制坐標系中。本次工程區域較大,工作周期相對單體建筑掃描較長。為改善工作進度,提高質量降低整體區域平面誤差,在控制測量的環節中增加反射靶盤,對于區域四角的建筑設施,以及核心區的重要設施采取多點標靶控制,增加轉換參數的個數,提高轉換質量。
2.4 數據提取及出圖
經過轉換坐標的點云就是真實的場景加載擬定坐標系的三維坐標,點云是掃描成果文件,是表達目標空間分布和表面光譜特性的海量點集合。具有可量測性、光譜性、不規則性、高密度性、表面性。包含imp、rwp、rsp、asc、xyz、ptc、txt、pol等多種數據成果格式。鑒于點云特點以及數據格式的多樣性,使得在成果輸出階段可提供更多的方法。本次以直接導出點云為例,配準后的點云數據和影像數據,根據實際需要使用相應的專業軟件即可制作點云剖面圖,主要步驟如下:
(1)根據數據情況進行點云抽稀,在滿足建模精度的條件下減小數據量,并加載整體數據。
(2)在專業軟件內基于建構筑物本身特征和掃描儀坐標系,轉換北京地方坐標系。
(3)根據需求在建構筑物特定位置制作點云剖切,形成點云剖面
(4)最終把點云剖面轉換成xyz格式。
由上述步驟制作的點云剖面在cad中打開,轉好相應的視圖直接進行特定建構筑物平立剖面的繪制并最終提交成果。
2.5三維數據建立模型
三維激光掃描儀所得到的點云模型,是由空間不規則的離散點構成的,這些點云之間并沒有構成建筑物的實際表面,所以要得到建筑物的有拓撲關系的真實表面,還要通過特殊的算法來恢復建筑物表面的這種拓撲關系,構建建筑物表面三角網模型就是其中一種比較簡單而實用的方法[7]。
由于三維激光所采集的數據是數以萬計的三維離散點,因此在進行三角網建模時,就難免會產生數據冗余,一個平面P在正常的情況下,可以由兩個三角網構成,但是由于點云過于密集,所以生成的三角網往往會遠遠多于兩個,這樣就無疑造成了數據冗余,所以在構建三角網之后還要對建筑物的三角網模型進行數據簡化[8]。
實體模型也是基于建筑物點云模型構建的。實體模型和三角網模型一樣,也是建筑物模型的一個形式,但是二者有很大的區別:三角網模型表現建筑物更精細、準確,但是數據量較大;實體模型表現建筑物沒有三角網模型那樣精細,但是數據量很小。所以構建一個建筑物的模型時,為了更精確地表現建筑物,最好把二者結合起來,建筑物復雜的地方(如板、梁、柱)可以構建三角網,比較簡單、規則的地方(如建筑廠房)可以構建實體模型[9],如圖2所示。
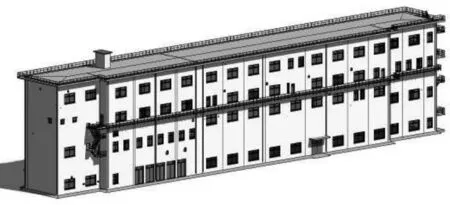

圖2 點云與實體模型
2.6 成果檢核
本次工程采用全站儀極坐標法、鋼尺測距法、直接水準法等多種模式對金安橋工業設施成果數據進行了檢核[10-11],水準全線復核,手持激光測距儀量校尺寸40處,全站儀測點80個,精度全部符合規范要求,如表1所示。
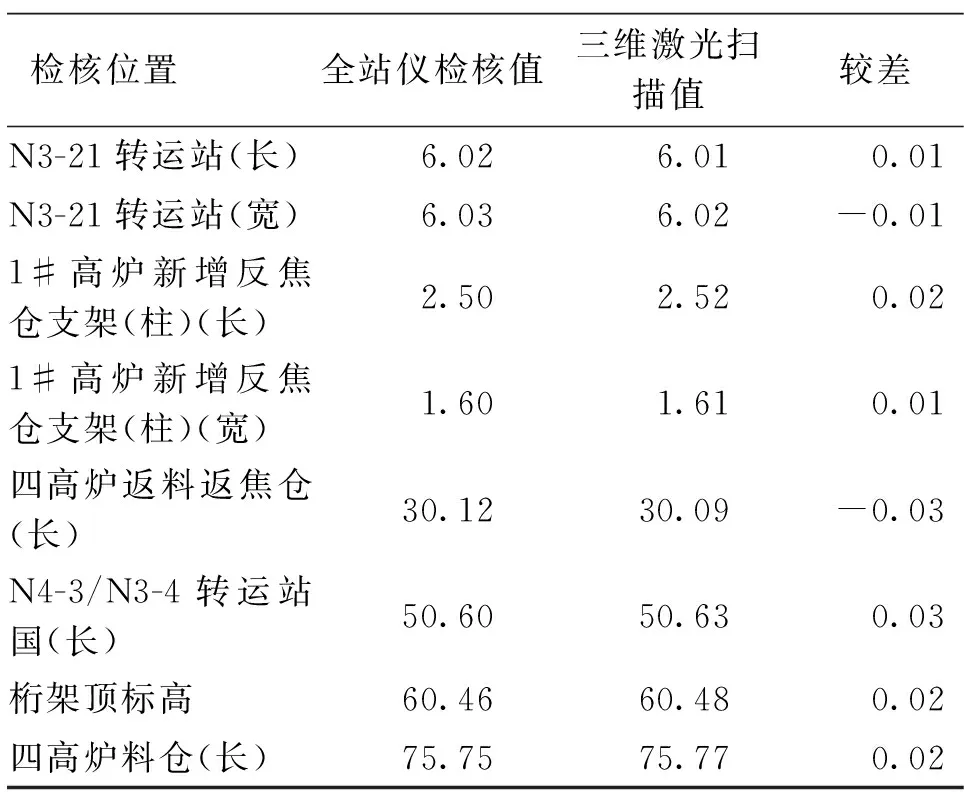
表1 尺寸校核檢查表 單位:m
3 結束語
擁有8年三維掃描技術經驗的北京首鋼國際工程技術有限公司,在新首鋼園區工業設施改造中采用三維激光掃描技術,對老舊工業設施,尤其是沒有圖紙的,或者原圖紙變更較大的設施進行掃描測繪,根據不同設計單位的需求提供了工業設施的二維線畫圖、三維點云模型、三維模型等產品。成果提供給國內知名設計單位,如中國建筑設計院、北京建筑設計研究院、中聯筑境設計院進行設計,獲得好評。在三維激光掃描技術方面積累了豐富的工程經驗,有以下經驗可以在工業區建筑改造可進行復制推廣:一是三維激光掃描技術將工業遺存資源數據獲取由三維全息數據取代單點采集二維數據,豐富了數據信息,成果有巨大的應用潛力;二是三維激光掃描技術提高了測繪效率和獲取數據的精度,為老舊工業資源改造提供了海量的基礎數據,是工程順利改造的技術支撐;三是三維點云數據及其衍生成果具有更多的應用價值。
依據新時期測繪行業“兩服務、兩支撐”的工作定位,下一步將在實景三維方面展開探索,配合已有的技術,研究局部實景三維的構建。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
