一種羽流試驗液氦熱沉外流程技術研究
2022-05-19 13:47:16王惠穎米輝耀高洪如
低溫與特氣 2022年2期
王惠穎,王 濤,米輝耀,高洪如
(北京航天試驗技術研究所,北京 100074)
1 前 言
空間環境模擬器可以模擬太空真空環境、太陽輻照環境和冷黑環境,從而進行整星或分系統熱真空試驗[1]。冷黑環境的實現主要通過外流程供應系統將液氮、液氦等低溫介質輸送到真空艙內的熱沉中,使熱沉的溫度低于10 K。本文介紹的某羽流試驗臺采用液氮外流程、液氦外流程來供應低溫介質,供給熱沉、羽流吸附泵及真空系統使用,采用氣氮外流程在試驗后進行系統復溫。
2 系統組成
羽流試驗臺主要由羽流試驗艙(真空艙)、液氮液氦熱沉、抽空系統、羽流吸附泵、外流程系統、工藝氣液路、測量控制系統等組成。試驗中使用抽空系統使試驗艙內達到預定真空度,模擬真空環境,使用外流程系統供應低溫介質模擬冷黑環境。
3 液氦外流程工作原理
液氦外流程采用開式沸騰方式,用來為液氦熱沉及羽流吸附泵提供低溫預冷和工作時需要的液氦。主要由液氦罐、真空管路、調節閥、氣動閥、安全閥、壓力傳感器、溫度傳感器等組成。在用液氮將熱沉預冷到100 K時,用氦氣置換熱沉和管路中的氮。氦氣罐內氦氣經減壓閥、氣動隔離閥進入進氣管路,而后分4路分別進入液氦熱沉1、液氦熱沉2、液氦大門熱沉和羽流吸附泵,打開熱沉各路出口管路上的調節閥和總管路上的氣動閥,將液氮和氮氣吹除出熱沉,經管路后放空。

圖1 羽流試驗艙
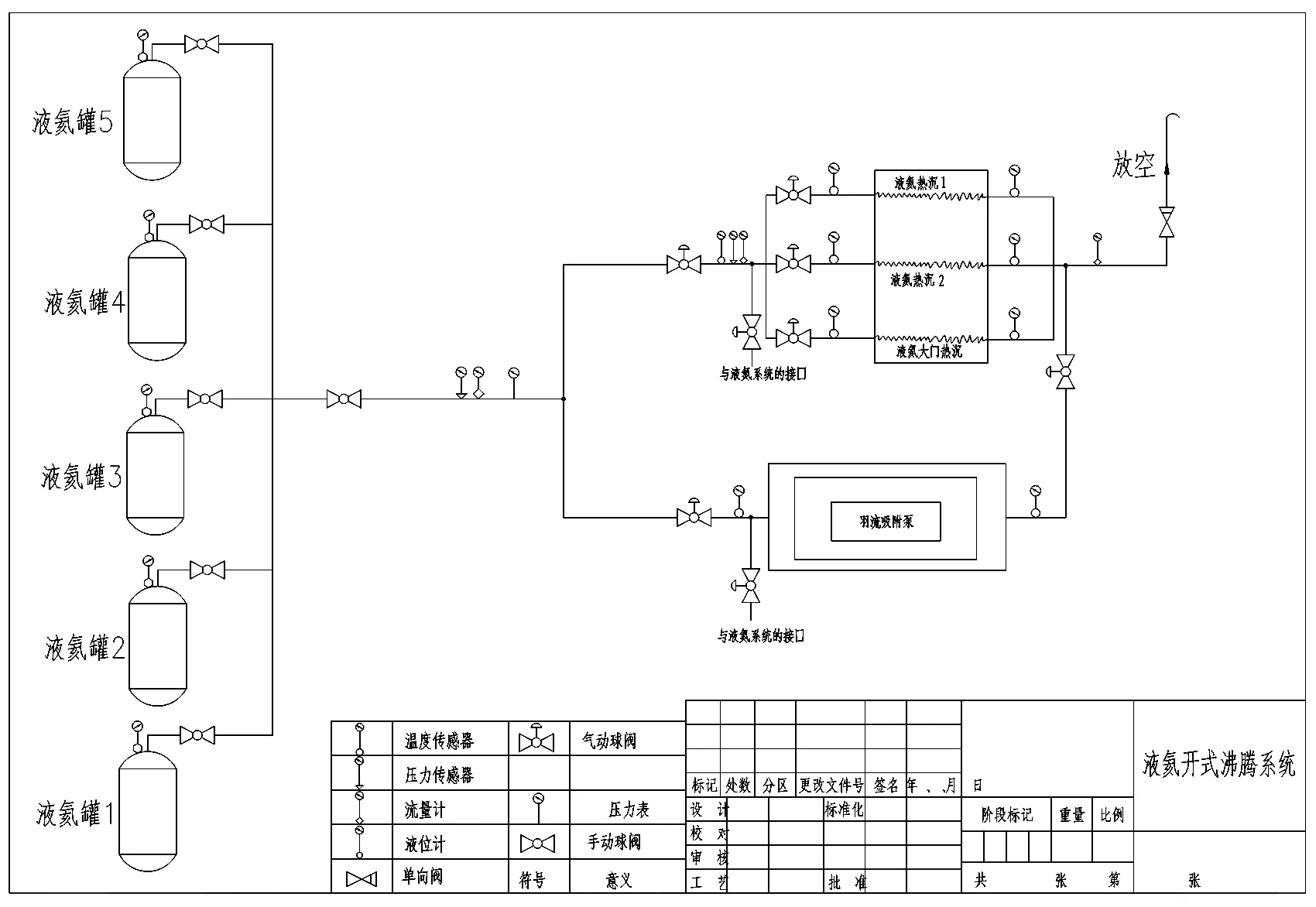
圖2 液氦外流程系統原理圖
液氦外流程采用5個液氦罐并聯供液,打開液氦杜瓦的節流閥,通過快速接頭,液氦經自增壓進入外流程,打開各路管道上的手動閥,分4路分別進入液氦熱沉1、液氦熱沉2、液氦大門熱沉和羽流吸附泵。通過監控4路熱沉前后端溫度傳感器的溫度信號,調節熱沉出口端的薄膜調節閥,實現熱沉從100 K預冷至10 K,后通過總管路上的氣動閥,將氦放空。而后系統開始工作,繼續通入液氦,維持液氦熱沉和羽流吸附泵出口溫度10 K,連續工作2 h后,關閉液氦熱沉和羽流吸附泵進口端手動截止閥,熱沉出口處氦流經液氦隔離閥和總管路上的氣動閥,放空。由于每路熱沉以及羽流吸附泵的高度流阻不一樣,在同樣的入口壓力下,各路的流量有差異甚至無液氦流過。在各個流路出口設置調節閥,實時調節各路的流量達到控制溫度的目的。此外,在4路熱沉出口端管路上安裝安全閥,保護系統。
4 測量控制系統
測量控制系統主要完成液氦管路上流量、壓力的測量,熱沉進出口溫度、特征點溫度的測量及液氦罐狀態參數的測量。測控系統原理如圖3所示。
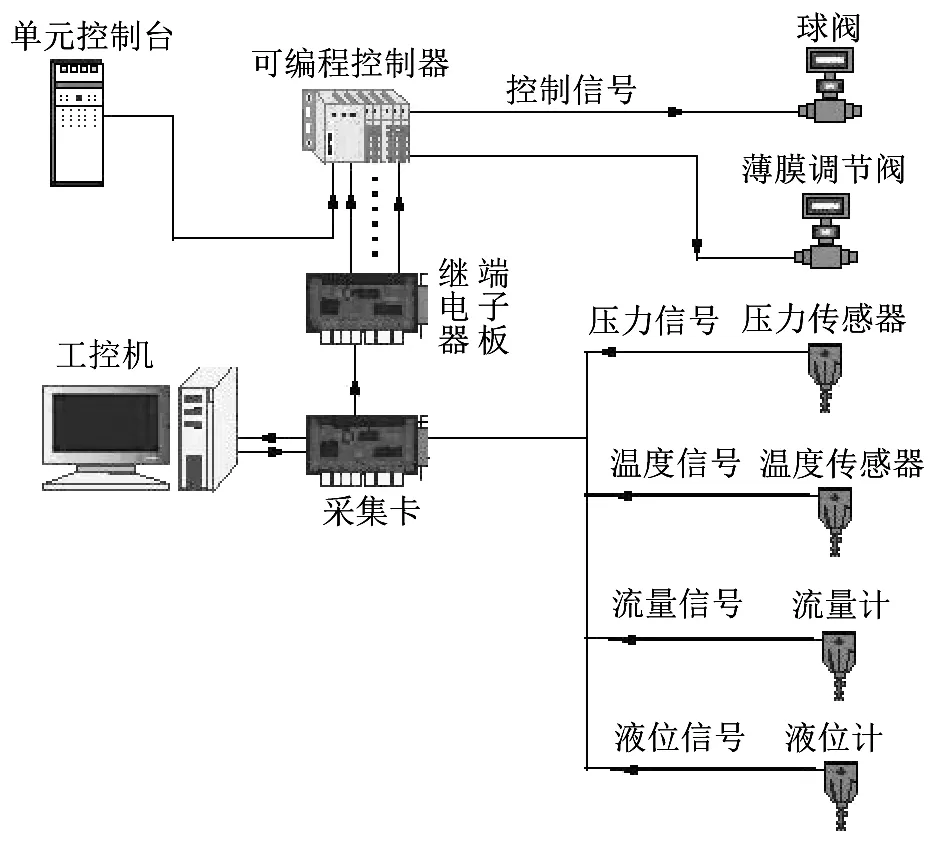
圖3 液氦循環系統測量控制系統
為滿足測量要求,在系統相應位置,如:壓力傳感器、溫度傳感器、流量計、液位計等前端測量設備。
前端傳感器產生的信號經過調理模塊的濾波和隔離放大后由采集板接收。模擬采集卡采用臺灣研華PCL多功能板,設計有1 KB FIFO緩存器數據傳輸塊;16路SE模擬輸入或8路差分模擬輸入;數字量輸入輸出通道分別為16路、16路,兼容TTL/DTL;板載1路模擬量輸出以及1個8254兼容定時/計數器。
閥門的開啟、關閉由控制臺進行單元控制。當接通相應閥門的單元控制開關后,產生的輸出量信號送給固態繼電器控制電路的通斷,實現對二位五通電磁閥的開關控制,從而完成氣動球閥操縱氣的控制。
5 結 論
熱沉外流程供應系統包含液氮、液氦、氣氮3個外流程系統,工藝系統各設備工作協調性對于環境模擬至關重要。在項目建設中除考慮各系統工藝合理性、經濟性外,還需統籌考慮各系統間的銜接問題。
猜你喜歡
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
工業設計(2022年8期)2022-09-09 07:43:20
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
石油化工自動化(2018年5期)2018-11-14 02:34:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45