一種非線性PID控制算法在溫控系統中的應用研究
2022-05-20 10:13:14姚立平吳文明姜楊陽譚仲威
物聯網技術 2022年5期
關鍵詞:系統
姚立平,吳文明,姜楊陽,譚仲威
(廣東省科學院健康醫學研究所,廣東 廣州 510500)
0 引 言
溫度控制系統具有時變性、非線性及純滯后性等特點,因此系統無法建立起精確的數學模型。由于比例-積分-微分(Proportion Integration Differentiation, PID)具有結構靈活、參數整定方便、魯棒性強等特點,因此被廣泛用于化工、冶金、機械等領域。但常規的PID控制算法對比例、積分、微分的線性組合,難以在快速性和引起超調量方面做到平衡,不能完全符合工況的要求。針對此問題,本人在原來的PID基礎上,引入非線性因素,即引入了經過非線性變化的誤差比例、積分和微分環節,由于控制器的增益參數隨控制誤差而變化,從而提高了算法的適應能力。
范政等人將非線性PID控制算法應用于連續攪拌反應釜中,研究表明相比于線性PID控制系統,引入非線性PID控制系統的響應曲線輸出更加平滑,過渡時間更短,系統的抗干擾能力更強。王迪等人在微型燃氣輪機中應用非線性PID控制器,仿真結果說明非線性PID控制器能夠提高微型燃氣輪機的穩定性,相對于線性的PID控制器具有更好的控制性能。徐健義等人將非線性PID控制算法用于半導體制冷器溫度控制,仿真和實驗結果說明設計的非線性PID控制器相比線性PID控制器提高了系統的適應性和抗干擾能力。基于此,本文設計了以STM32控制器為控制核心的溫度控制系統,利用鉑電阻Pt1000和MAX31865電路模塊采集系統溫度,使用半導體制冷器TEC和H橋邏輯控制器模塊調節系統升溫或降溫模式,使用PWM輸出調節系統的輸出功率,上位機軟件采用串口通信獲取當前系統的溫度信息;之后依據設定的目標溫度進行非線性PID控制調節,將PID輸出值發送到下位機控制器系統中,下位機將通過調節系統的功率進行溫度調節。下位機系統具有液晶屏溫度、運行狀態等信息顯示功能及聲光指示功能。
1 系統的結構組成
系統的結構組成如圖1所示。由于DS18B20等數字溫度傳感器存在精度低、響應速度慢、穩定性一般等問題,因此使用體積小、測量精度高、穩定性好的四線制鉑電阻Pt1000作為溫度采集元件;使用MAX31865芯片構成的轉換模塊電路對采集的模擬信號進行離散化,微控制器使用SPI通信獲取高精度的數字溫度信號,具有操作簡單、數據傳輸速率較高等優點,其電路單元如圖2所示。使用半導體制冷器ATE1-TC-127-8AH作為系統的循環加熱制冷元件,是一種利用半導體材料構成P-N結、形成熱電偶對、產生帕爾貼效應的熱電制冷技術。通過改變制冷片兩端通過的電流方向來設置制冷片處于加熱或者制冷的功能,采用H橋邏輯控制電路實現對半導體制冷器TEC兩端電流方向的控制,其基本電路如圖3所示。
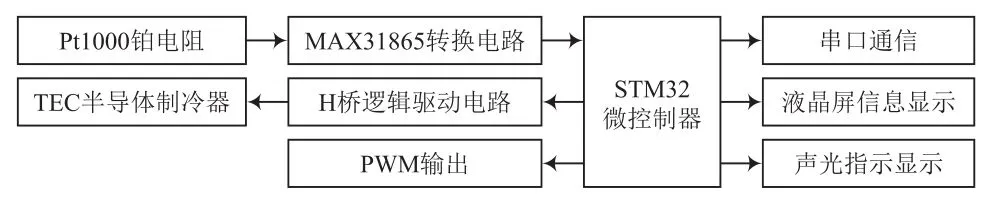
圖1 溫度控制系統的結構組成
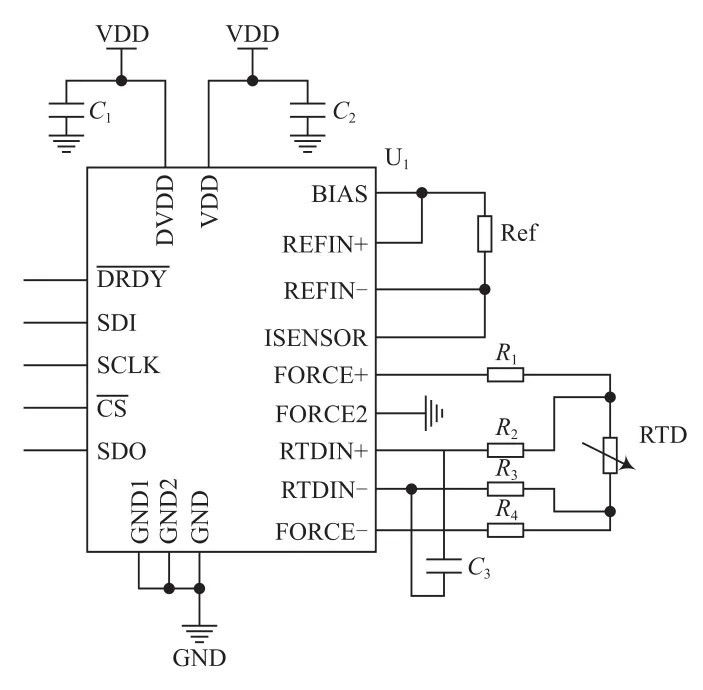
圖2 溫度采集轉換電路
由圖3可以看出,H橋電路由4個N型MOS管組成,下橋臂的Q、Q兩個MOS管導通壓降只須使得>,但上橋臂的Q和Q兩個MOS管的導通壓降則需要使>VCC+,因此在半橋驅動器IR2014的VB端接有包含電阻和的分壓電路,保證HO輸出為高電平時,上橋臂Q和Q的GS端有足夠的壓降能夠被導通,實現了對帕爾貼TEC半導體進行加熱、制冷的控溫功能。此外,為了調節系統的輸出功率,采用脈沖寬度調制技術(Pulse Width Modulation, PWM)輸出調節系統的功率,即產生占空比不同的矩形脈沖來調節H橋功率驅動電路的工作時間,從而調節了導體制冷器的制冷效率。上位機通過串口通信采集系統當前的溫度信息,并依據設定的目標溫度進行非線性PID控制調節,將PID輸出值傳送到控制系統中,控制系統將輸出值作為PWM的占空比輸出,從而完成了一次系統的溫控調節。此外,控制系統具備液晶屏顯示系統當前溫度以及運行狀態等功能,還具備聲光指示功能。

圖3 H橋邏輯控制電路
2 溫度控制算法
PID控制算法具有控制原理簡單、容易實現、魯棒性高等特點,被廣泛應用于工業工程控制,是過程控制系統中普遍運用的算法。隨著控制理論的發展,不斷出現各種改進的PID算法。PID控制器是利用比例、積分、微分等計算出控制量的控制器,基本表達式為:

其中:()為控制器輸出值;()為溫度的偏差值;為比例系數;為積分系數;為微分系數。可見,比例運算是成比例放大目標溫度值與當前溫度值間的誤差,引入的積分運算對系統誤差進行了累積。為了消除系統的余差,引入微分運算反應偏差的變化速度,加快系統的調節速度,改善系統的動態性能。
為了有效縮短溫度調節過渡時間、加快溫度調節的時間引入了Bang-Bang控制方法,即當系統的溫度偏差較大時系統滿功率調節;當系統的偏差較小時,執行PID控制,如式(2)所示:


步進式PID控制算法是PID控制方法的一種改進方法,輸出信號逐步逼近系統的設定信號,使得系統平穩,避免系統產生超調,但存在系統響應速度慢等缺點。
由于引入的積分環節會累積較大的偏差值,從而引起系統較大的超調而導致系統不穩定,因此引入了變積分PID調節算法,即當系統產生了較大的偏差,則積分調節應該變慢,當系統的偏差比較小時,則積分運算應該變快。給定變速區間[,+],則變速系數表示如下:
其中,變速系數(())是一個關于()的函數。

由于采集的實時系統溫度同樣會攜帶著干擾噪聲,因此使用基于微分器的改進PID控制方法。該控制算法不僅能對輸入的溫度信號進行高頻濾波,還能對輸入信號進行微分,提高PID控制算法的適用范圍,從而提高系統的動態性能。假設輸出信號為()和(),其中()是跟隨輸入信號,()是()的微分,表達式為:

式中:,,,,>0;、均為大于0的奇數,且<;()為任意的輸入信號。
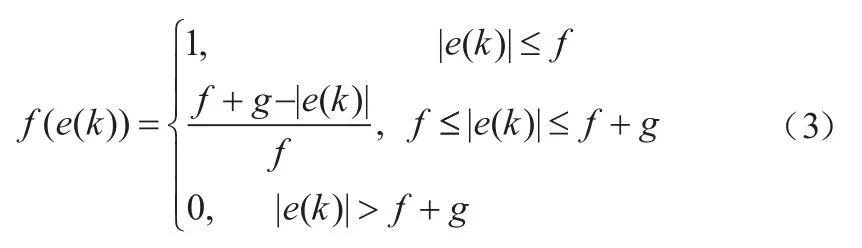
由于PID控制算法參數固定不變,容易引起系統的超調量,不能完全適應溫控系統的穩定性要求,因此在原來的PID基礎上引入非線性因素,即引入了經過非線性變化的誤差比例、積分和微分運算,由于控制器的增益參數隨控制誤差而變化,從而提高了算法的適應能力。基本表達式為:

其中:0<<1<;、是PID控制器的系數;是當前溫度與設定溫度的誤差;Δ是當前溫度與設定溫度的誤差變化率。對誤差引入的非線性因子如式(7)所示:
式中,為區間長度。
3 仿真與實驗
3.1 溫控系統仿真分析

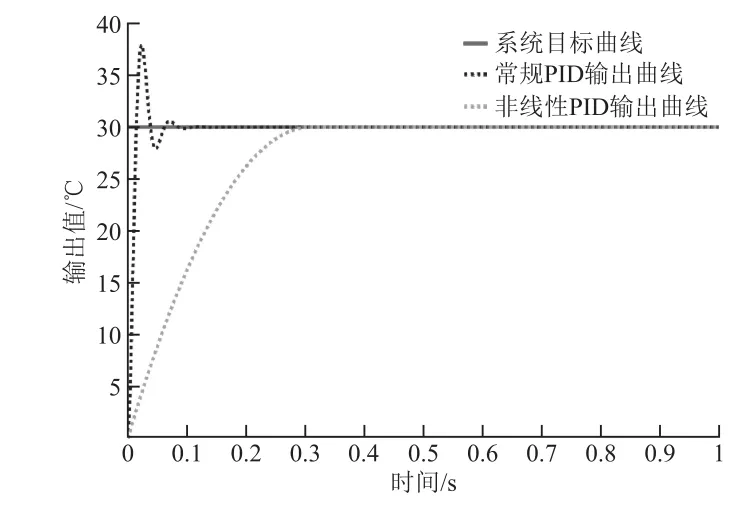
圖4 仿真系統輸出響應曲線
由圖4可以看出,線性PID雖然能使得系統較為快速地到達指定的目標溫度,但產生了較大的超調;而非線性PID控制算法能夠有效地避免控制系統超調,使得輸出響應曲線較為穩定地控制在指定的溫度值,提高了系統的穩定性。
3.2 溫控系統實驗分析
調節H橋驅動電路改變半導體制冷器TEC的電流方向,使得系統處于加熱模式,從常溫27 ℃升到95 ℃,系統的時間-溫度響應曲線如圖5(a)所示;調節H橋驅動器電路,改變半導體制冷器TEC兩端的電流,從而使得系統處于制冷模式,系統從高溫95 ℃降溫到65 ℃,系統的時間-溫度響應曲線如圖5(b)所示。
由圖5的系統時間-溫度響應曲線可知,引入非線性PID控制算法避免了系統產生較大的超調量,使得系統更為穩定地達到設定的目標值,提高了系統的抗干擾能力。
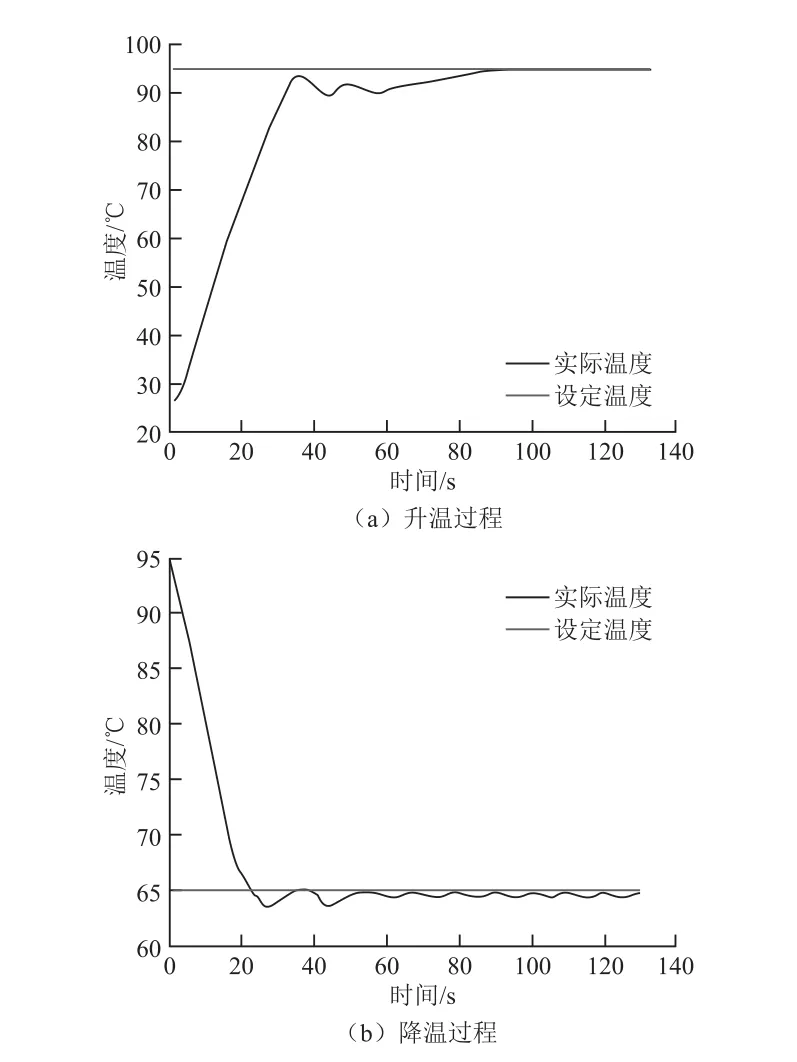
圖5 時間-溫度響應曲線
進一步地,系統的多次升降溫循環的溫度調節曲線、功率調節曲線以及誤差變化曲線如圖6所示。可以看出,引入的非線性PID控制算法能夠有效地調節系統的功率,使得系統穩定在設定的目標溫度上,在系統溫度達到設定的目標溫度之后,系統的誤差在0附近保持不變。

圖6 系統溫度-功率-誤差調節曲線
對本文溫控系統中引入的非線性PID控制算法與結合Bang-Bang控制的PID、引入微分先行的PID、步進式PID、變積分PID及基于微分器的PID進行了比較,各種方法的升溫過程和降溫過程時間-溫度變化曲線分別如圖7(a)和圖7(b)所示。
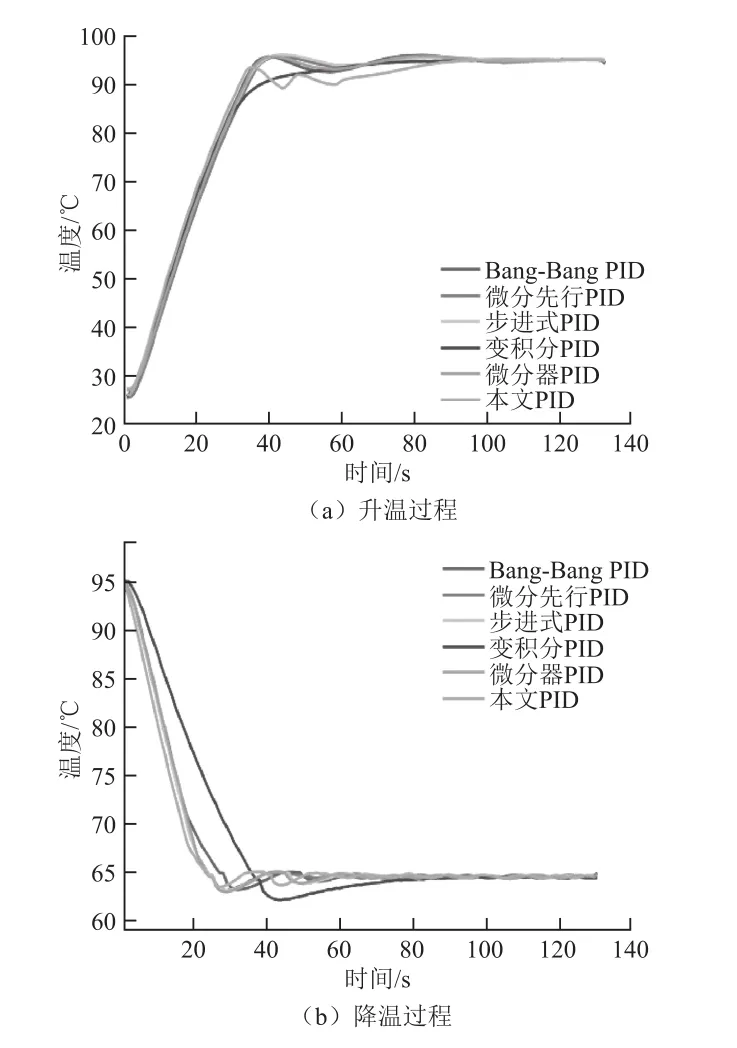
圖7 系統時間-溫度比較曲線
由圖7(a)和圖7(b)可以看出,相比于其他的PID控制算法,非線性的PID控制算法可以避免系統產生較大的超調量,加快了系統的響應速度,使得系統較為穩定可靠地到達指定溫度,并維持系統溫度不變,提高了系統的抗干擾能力,說明了非線性PID控制方法在溫控系統中的有效性。進一步地,本文也使用了溫度誤差平方()的積分平均ISE指標來進一步量化評估該算法的性能,表達式如下:

結合Bang-Bang的PID、引入微分先行的PID、步進式PID、變積分PID、基于微分器的PID和本文的非線性PID的見表1所列。
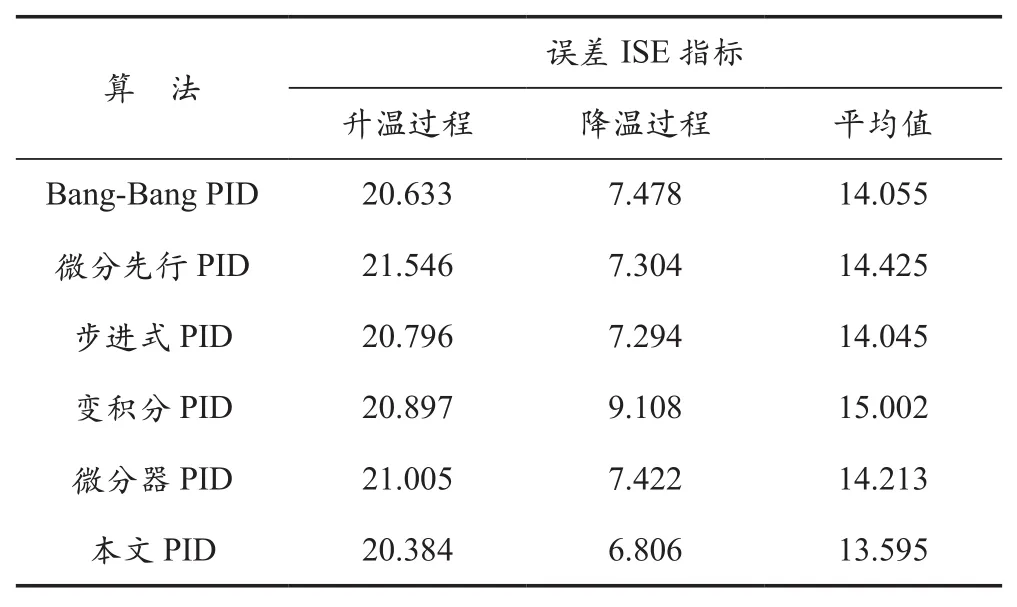
表1 多種PID溫度控制算法的誤差對比
在升溫過程和降溫過程中,本文非線性PID控制算法的ISE分別達到20.384和6.806;而結合Bang-Bang的PID分別為20.633和7.478,引入微分先行的PID分別為21.546和7.304,步進式PID分別為20.796和7.294,變積分PID和基于微分器的PID在升溫過程中ISE指標分別為20.897和21.005,而降溫過程中ISE指標分別為9.108和7.422。可見,非線性PID比其他PID控制算法的ISE指標都要小。非線性PID系統的平均ISE為13.595,而結合Bang-Bang的PID、引入微分先行的PID、步進式PID、變積分PID和基于微分器的PID的平均ISE分別為14.055、14.425、14.045、15.002和14.213,說明了非線性PID控制算法能夠減少系統的超調量,使得系統更加穩定地接近設定的目標溫度值,提高了系統的控制精度和抗干擾能力,在工程溫度控制方面具有一定的實用價值和應用價值。
4 結 語
本文采用STM32微控制器為系統的控制核心,采用鉑電阻Pt1000和MAX31865模塊采集系統溫度,采用半導體制冷器TEC和H橋邏輯驅動電路模塊調節系統溫度,使用PWM方法調節系統功率,在溫控系統中引入了非線性PID控制調節。實驗結果表明,該控制方法減少了系統的超調量,提高了系統的控制精度和抗干擾能力,控制性能優于其他的PID控制算法,如結合Bang-Bang控制的PID、引入微分先行的PID、步進式PID、變積分PID及基于微分器的PID等,在工程溫度控制方面具有一定的實用價值和應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
